eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Dasol Kwon
, Eui S. Jung
10.5143/JESK.2019.38.3.265 Epub 2019 June 29
Abstract
Objective: The aim of driving simulator study is to investigate interactions between driver behaviors and the automated vehicles according to non-driving related tasks modality and traffic density.
Background: With the addition of a greater number of advanced driver assistance systems in vehicles, the driver has an opportunity to have non-driving related tasks during autonomous driving. Understanding the implications of such advancements on driving behaviors and road situations is important for safety.
Method: 20 participants were recruited to measure take-over reaction time, lateral position, and Short Stress State Questionnaire (SSSQ) under different traffic conditions of suggesting NDRT modalities. As well as comparing the effects of traffic complex while doing different NDRT, the effect of NDRT modalities were also investigated.
Results: Traffic density showed minor effects on driving performance and SSSQ results. However, NDRT modalities have differences: auditory NDRT modalities led to shorter takeover reaction times and higher task engagement.
Conclusion: For the design and evaluation of human-automation interaction in conditionally automated driving systems, NDRT modalities seems to play a major role, compared to the traffic density.
Application: The present results can be used to appropriately design human-automation interfaces considering NDRT modalities.
Keywords
Autonomous driving Non-related driving task Stress Task engagement
1.1 Backgrounds of fatigue in the transportation setting
자동차는 전세계적으로 가장 중요한 교통수단이다. 국내의 경우 2억 545십만대의 자동차 등록이 되어 있고 이는 1960년부터 꾸준히 증가하고 있다(Department of Transportation, 2007). 한국의 경우, 2018년도에 등록된 자동차량 수는 2,320만대로 2003년 이후로 완만한 증가를 보이고 있다(e-index, 2017). 도로에 차량이 증가할수록 교통사고도 증가한다.
교통사고의 여러 가지 원인 중 운전자가 유발하는 인간 방해 요인의 가장 중요한 두 가지는 운전자의 피로와 주의 산만이다(Saxby et al., 2013). 특히 운전자 피로는 도로 사고의 주요 원인으로 인용되었고, 피곤한 운전자의 수는 여전히 높은 것으로 드러났다(Lee, 2006). 미국의 National Highway Traffic and Safety Administration (NHTSA, 2013)에서 조사한 결과, 56,000건의 피로와 관련한 사고가 매년 일어난다. 더욱이 2011년에는 피로가 방해가 되어 사고로 인한 3,331명이 사망하였다. 한국의 경우 피로로 인한 졸음운전 사고는 2016년 전체 교통사고 발생건수 220,917 중에서 202건(9%)의 사고, 4,292건(19%)의 사망, 그리고 408건(12%)의 부상이 발생하였다(Public data, 2017). 피로는 운전 시에 중요 방해 요인으로써 사고를 유발한다.
이러한 피로를 피하거나 없애기 위해 운전자들은 운전과 관련 없는 과제를 수행한다. 예를 들어, 노래를 듣기, 통화하기 등 주의를 운전 외에 다른 과제로 돌려서 피로를 피하려 한다. 하지만 수동 주행일 경우, 휴대통화 사용은 운전자의 반응시간을 증가시키고, 운전 과제에 대한 요구가 높거나 낮아도 그에 대한 정신적 작업량은 증가함을 발견하였고, 이러한 운전자의 행동의 변화는 사고의 위험을 증가시킨다(Alm and Nilsson, 1995).
1.2 Autonomous driving system and OOTLUF
운전 피로와 교통 밀집도와 같은 주관적, 환경적 운전 방해 요소를 최소화하고, 교통상황 및 운전의 효율성을 증대시키기 위해 자율주행 기능이 추가되기 시작하였다. 현재 차량에 탑재되어 있는 적응형 순향 제어 장치(adaptive cruise control), 위험 감지(hazard detection), 레인 모니터링 시스템은 자율주행의 기본 요소이다(Neubauer, 2014). 현재 automation level인 level 2와 3단계 사이에서는 첨단 운전 보조 장치(advanced driver assistance: ADAS)가 교통상황에 따라 실제로 제동 및 가속을 동시에 제어할 수 있는 수준이다(NHTSA, 2013). 이러한 자율주행 기능은 운전자의 멘탈 워크로드와 방해 요소를 감소시킬 수 있다. 하지만 이러한 자율주행 기능인 자동화 수준이 올라가면 모니터링과 관련하여 각성(vigilance)과 자기 만족(complacency)의 변화이다. 이와 같은 요인들은 운전자가 높은 레벨의 운전의 모니터링에 대한 방해 요소이다. Parasuraman (1987)은 복잡한 모니터링과 시스템 운행자의 수동적인 모니터링은 각성 효과(vigilance effect)를 가져온다고 결론지었다. 자동화에 지나친 의존도인 자기 만족(complacency) 또한 신뢰도와 연관되기도 한다. 이는 운행자의 신뢰가 시스템으로 과중됨으로써 집중이 다른 태스크로 옮겨진다. 그러므로 제어 해야할 시스템 파라미터에 적절히 반응하지 않는 것이다(Parasuraman et al., 1996). 이는 낮은 상황인식과 다시 운전을 재개했을 때 매뉴얼 스킬의 감소를 불러 일으킨다. 이러한 결과는 "Out of the Loop Unfamiliarity (OOTLUF)" 현상이 나타난다(Wickens et al., 2015). 이러한 자율주행 시스템은 운전자의 작업 부하 및 주의 산만을 줄일 수 있을지라도 운전 재개와 그에 대한 대처 능력이 저하됨에 따라 개인적 불편과 스트레스 증상으로 나타날 수 있다(Desmond et al., 1998; Hancock and Verwey, 1997; Neubauer et al., 2012a; Stanton and Young, 2005).
1.3 NDRT during autonomous driving and its effect on driving performance
OOTLUF 현상으로 인한 vigilance effect를 최소화하기 위함과 앞서 언급한 피로를 감소하기 위한 방법으로 운전자는 자율주행 시에 운전과 관련 없는 다른 태스크(Non-Driving Related Task: NDRT)를 수행한다. 더욱이 차량제조업체는 NDRT와 관련한 차량 내 미디어 기능을 활성화하고, 운전 기능과 미디어 기능의 연결성을 발전시키고 있다(Neubauer, 2014). 피곤한 운전자의 미디어 사용이 방해 요소로서 작용하여 경각심의 상실을 악화시킬 수 있다(Neubauer et al., 2012b). 그런데 피곤한 운전자의 미디어의 사용에 대한 다른 의견이 제시되고 있다. 운전자가 피곤을 인식하여 NDRT를 수행함으로써 운전자 스스로 태스크에 몰입될 수 있도록 시도한다는 점이다(Neubauer, 2014). Verwey와 Zaidel (1999)은 특정 조건에서는 이차 과제를 수행하는 것이 작업 참여와 주의력이 지속적으로 증가하는데 도움이 된다는 사실을 발견하였다. 특히 Gershon et al. (2009)는 "Trivia"라고 불리는 interactive cognitive task (ICT)가 운전 퍼포먼스와 정신적 상태를 증가시켰음을 증명했다. 20분간 Trivia 퀴즈에 참여한 운전자는 나은 차량 컨트롤을 보였고, 대조군에 비해 동기부여 점수가 높았고, 주관적 졸음이 적음을 발견했다. 덧붙여서 Neubauer (2014)는 Trivia 퀴즈게임과 휴대통화 통화의 미디어 사용이 주관적인 작업 참여(task engagement)를 유지시켜서 자율주행 시 미디어의 참여가 조작권 전환 이후 운전 퍼포먼스(the standard deviation of lateral position)가 증가함을 증명하였다. 하지만 미디어 사용은 상식퀴즈게임과 휴대통화 통화의 태스크로 증명되었지만 다른 미디어 타입에 대한 증명이 아직 밝혀진바 없다. 특히 현실적인 미디어 사용에 대한 제공이 필요하다.
1.4 Traffic density
수동 주행의 경우 교통 밀집도가 높을수록 차량 제어 능력이 감소하고, 상황인식이 저하되었다(Heenan et al., 2014). 또한, 자율주행의 기능이 높아질수록 교통 밀집도가 자율주행 기능이 불가능 할 때 운전자에게 제어권 전환을 넘겨주는 퍼포먼스(takeover performance)에 뚜렷한 영향을 끼치는 것을 사전 연구를 통해서 증명되었다(Gold et al., 2014; Radlmayr et al., 2014). 주변 차선에 1km당 대략 30대의 차량의 높은 차량 밀집도의 경우, 제어권 전환 퍼포먼스가 주변 차량이 없는 경우에 비해 감소하였다(Gold et al., 2016). 하지만 30대의 차량은 극단적인 환경으로 Gold et al. (2016)는 0, 10, 20 차량/1km의 다른 교통 밀집도를 통하여 밀집도가 높을수록 제어권 전환 능력이 감소함을 증명했다.
1.5 NDRT modality and traffic density
자율주행의 제어권 전환상황에서는 교통 밀집도가 중요한 이슈로 차지하며 상대적으로 운전자의 상태(NDRT를 하는 상태)가 교통 밀집도만큼 운전자와 자율주행차의 영향을 주지 않았다(Gold et al., 2016). Gold와 그의 동료들은(2016) 교통 밀집도는 운전 퍼포먼스에 영향을 주지만, NDRT의 유무(20-Questions Task)는 영향을 주지 않음을 발견하였고, 교통 밀집도와 NDRT의 교호작용이 없음을 발견하였다. 이는 NDRT가 없는 상태와 비교하여 실험 참가자들이 자율주행 시 통화를 걸었을 때 브레이크 반응시간이 줄어듬을 발견한 Neubauer의 결과의 상반된다. 상반된 이유는 운전 실험의 시간 차이로 5~6분과 1시간의 차이가 있기 때문이다. 또한, 교통 밀집도가 높아지면 높아질 수록 교통상황이 테이크 오버 퀄리티에 강한 영향을 끼쳤으나, SuRT와 n-back Task의 NDRT 경우 제어권 전환 퀄리티의 강한 영향을 끼치지 않았음 증명하였다(Radlmayr et al., 2014). 교통 밀집도가 다름에 따라 다양한 NDRT의 타입 수행 이후 수동 운전에 대한 주관적 상태 평가는 아직 이루어지지 않았다. 또한, 대부분의 사전 연구는 NDRT을 개별적으로 분류하여 제공하였지만 NDRT의 모달리티로 나누어서 실험을 설계한 연구가 미흡하다. 본 연구는 NDRT의 모달리티를 구분하여 실험을 진행하고자 하고, 교통 밀집도에 따라 운전 퍼포먼스 능력 감소와 상황인식 저하가 발견되었는데 다른 교통 밀집도에서 다양한 NDRT에 따라 운전의 태스크 몰입도(task engagement) 또한 영향을 받을지 본 실험을 통해서 파악하고자 한다.
2.1 Participants
본 연구의 실험에 참여한 실험 참여자는 20명(13 남자, 7 여자)을 대상으로 실험하였다(M=24.1, SD=2.8). 이들의 운전 경력은 1년에서부터 10년의 범위였다(M=2.3, SD=3.8). 모든 실험 참가자들은 정상 범위의 시력이 있으며, 운전면허 자격증을 취득하였다.
2.2 Apparatus
태스크 수행을 위한 장비는 27인치 삼성 LCD flatpanel screen을 사용하였고 이 스크린 사이즈는 1,920×1,080 pixel로 이루어졌다. 자율주행 태스크를 위한 software는 OpenDS 프로그램으로 실행하였고, Logitech G27 racing wheel, brake와 clutch pedal을 이용하였다.
2.3 Questionnaires
모든 실험 참여자는 운전 태스크에 참여하기 앞서서 실험 동의서를 작성하고, 인적 사항과 운전과 관련된 기본 질문 사항에 대답하였다. 그 질문 사항은 나이, 성별, 운전 경력이 포함되었다. 기본 질문 사항의 답변이 끝난 후, 실험 참여자의 현재 상태를 파악하는 주관적 평가인 Dundee Stress State Questionnaire (DSSQ)의 축약 버전인 Short Stress State Questionnaire (SSSQ)에 대한 질문에 답하였다(Matthews et al., 2002; Helton, 2004). 이는 다차원의 주관적 상태를 정의하기 위한 평가지표로서 Matthews et al. (2002)이 개발한 DSSQ는 96개의 질문으로 구성된 삼차원 모델의 주관적 스트레스 평가 척도이다. 이는 요인분석을 통하여 감정 상태(mood), 동기부여(motivation), 인지(cognitive factors)의 10가지 주요 변수가 산출되었다. 감정 상태(mood)는 활력(energy), 긴장(tension), 기쁜 상태(hedonic tone), 동기부여(motivation), 인지(cognitive factors)는 자아 중심(self-focus), 자존감(self-esteem), 집중력(concentration), 자신감(confidence), 통제력(control), 인지적 방해(cognitive interferences)이다. 이 10가지 변수는 요인분석을 통하여 상위 그룹 개념인 태스크 몰입(task engagement), 짜증(distress), 그리고 걱정(worry)로 그룹핑 된다. 이러한 DSSQ는 운전자의 스트레스를 신뢰할 수 있는 예측 모델로서 사전 연구에서 증명하였다(Matthews and Desmond, 2002). 상위 그룹의 3가지 요인을 토대로 각 세가지 요인의 가장 높은 점수의 요인 점수에 해당하는 질문을 추출하였다. 또한, 총체적인 스트레스에 대한 질문을 추가하였다. 그러므로 총 4가지의 질문인 태스크 몰입(task engagement), 짜증(distress), 걱정(worry), 그리고 스트레스(stress)에 대한 질문을 7-Likert scale로 구성하였다. 이러한 4가지 질문은 운전 태스크에 본격적으로 시작하기 전과(pre-test), 후 상태(post-test)로 이루어져 있고, 전과 후의 점수를 비교하여 운전자의 다차원적인 상태 변화를 평가할 수 있다(Matthews, 2002). 그러므로 실험 참가자는 운전 태스크에 앞서 pre-test에 대한 질문에 답하였고, 운전 태스크 이후에 post-test에 대한 질문에 답하였다.
2.4 NDRT modality types
자율주행 기능과 관련한 세팅에서 자율주행에서 OOTLUF이 일어나는 현상을 반영한 현실적인 시나리오를 대상으로 여섯 가지의 다른 NDRT를 제공하였다. 여섯 가지 NDRT는 통화하기, 상식퀴즈게임(Trivia), 비디오 시청, 리딩, 타이핑, 그리고 모니터링이다. 통화하기, 비디오 시청, 리딩, 타이핑, 모니터링은 대중교통 이용 시 일반적으로 흔히 관찰할 수 있는 태스크이며, 대규모 설문조사의 결과이다(Gamberini et al., 2013; Lyons et al., 2011; Sivak and Schoettle., 2011). 또한, 앞서 언급한 Neubauer (2014)의 결과에 따라 통화하기와 상식퀴즈게임이 포함되었다. 이를 통해 제공된 여섯 가지의 NDRT의 지각적 모달리티를 구분하여 지각적 타입에 따른 NDRT 타입을 구분하였다. NDRT 모달리티는 운전 태스크에서 활발히 사용되는 총 세가지의 타입으로 구성되어 시각(Visual), 청각(Auditory), 운동근육(Motoric)이다. Table 1과 같이 통화하기와 상식퀴즈게임은 청각, 비디오 시청은 청각과 시각, 리딩과 모니터링은 시각, 타이핑은 운동근육의 모달리티로 나뉜다. 비디오 시청이 청각과 시각의 듀얼 모달리티 타입으로 구성되었다.
|
|
Visual |
Auditory |
Motoric |
|
Phone call |
|
o |
|
|
Trivia game |
|
o |
|
|
Watching video |
o |
o |
|
|
Reading |
o |
|
|
|
Typing |
|
|
o |
|
Monitoring |
o |
|
|
2.5 Experimental design
본 실험은 두가지 요인의 독립변수로 이루어진 개체 내 실험 디자인으로 첫 번째 독립변수는 교통 밀집도고, 두 번째는 다른 NDRT이다. 교통 밀집도는 두 가지 레벨(0, 20 차량/1km)로 이루어져 있고, NDRT는 앞서 제시한 통화하기, 상식퀴즈게임(Trivia), 비디오 시청, 리딩, 타이핑, 그리고 모니터링이다. 각 실험변수는 counterbalancing을 통해 실험 시 랜덤으로 진행되었다.
종속변수는 총 세 가지로 첫 번째는 제어권 전환 시 걸리는 시간인 리드타임을 평가함으로써 교통 밀집도와 NDRT에 따른 제어권 전환의 퀄리티 정도를 분석하였다. 두 번째는 운전 시 운전자의 측면 움직임(lateral position)의 표준편차를 통해 운전 퍼포먼스가 교통 밀집도와 NDRT에 따라 차이가 있는지 살펴보고자 한다. 마지막으로 세 번째는 교통 밀집도와 NDRT에 따른 주관적 스트레스 측정을 SSSQ를 통해 측정함으로써 태스크의 전과 후에 대한 차이와, 각 변수에 대한 SSSQ의 차이, 특히 태스크 몰입도(task engagement)와 스트레스를 중심으로 살펴보고자 한다.
2.6 Procedure
실험 참여자가 실험실에 도착하면 실험 동의서와 인적 사항을 적은 후에 본격적인 태스크를 하기 전에 실험 참여자의 그 당시 주관적 상태, 즉 태스크를 하지 않은 상태를 SSSQ에 답하는 것으로 파악한다(pre-test). 그 이후 실험 참여자는 12개 블록의 운전 태스크를 수행한다. 각 블록은 이와 같은 순서로 진행된다. 1. 운전자가 수동운전을 한다(2분). 2. 자율주행이 가능한 도로에서 자율주행 기능이 활성화 된다(3분). 이때 운전자는 다르게 주어지는 NDRT를 수행한다. 3. 자율주행에서 수동 주행으로 전환되는 알람이 주어지는데 알람은 15초 이내로 핸들을 잡고 운전을 재개하라는 정보를 제공한다. 4. 운전자는 15초 이내로 운전대를 다시 잡고 운전을 시작한다(2분). 5. 한 블록이 끝나면 운전 퍼포먼스 이후의 주관적 상태를 SSSQ에 답하는 것으로 파악한다(post-test).
3.1 Reaction time
반응시간에 대한 반복측도 분산분석 결과, Table 2와 같이 유의수준 0.05에서 교통 밀집도, NDRT에 따라 유의한 차이가 있는 것으로 나타났으며, 변수간 교호작용이 존재하였다. 교호작용이 존재하므로 반응시간에 대한 변수의 영향력을 검정하기 위해 post-hoc analysis를 수행하였다. 먼저 교통 밀집도에 유의한 영향을 미치고, NDRT 모달리티에도 유의한 영향이 나타났으며 교통 밀집도와 NDRT 모달리티의 교호작용에도 visual과 motoric 모달리티 외에는 유의한 영향이 나타났다(Table 2, Table 3).
|
Factor |
F |
p |
|
Traffic density |
19.294 (1, 78.672) |
<0.000* |
|
NDRT modality |
23.147 (3, 111.11) |
<0.000* |
|
Traffic density* NDRT modality |
14.142 (3, 46.89) |
<0.000* |
|
Factor |
F |
p |
|
Traffic density (Low vs.
High) |
19.294 (1, 39.336) |
<0.000* |
|
NDRT modality (Auditory vs.
Visual+Auditory) |
23.147 (1, 111.11) |
<0.000* |
|
NDRT modality
(Visual+Auditory vs. Visual) |
23.147 (1, 111.11) |
<0.000* |
|
NDRT modality (Visual vs.
Motoric) |
14.142 (1, 46.89) |
<0.000* |
|
Traffic density* NDRT modality
(Visual vs. Visual+Auditory) |
30.842 (1, 359.243) |
<0.000* |
|
Traffic density* NDRT modality
(Visual+Auditory vs. Visual) |
17.902 (1, 305.012) |
<0.000* |
|
Traffic density* NDRT modality
(Visual vs. Motoric) |
0.775 (1, 12.66) |
0.390 |
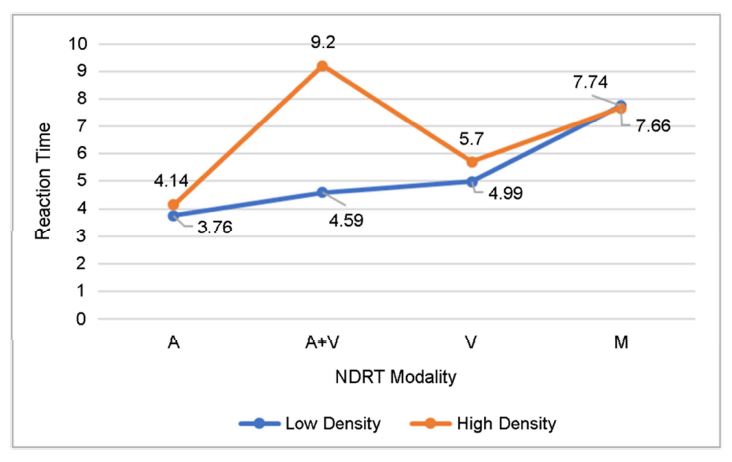
변수의 조합에 따라 반응시간의 평균 변화를 나타낸 Figure 1를 보면, 교통 밀집도가 높은 경우 반응시간이 증가하였다. 특히 듀얼 모달리티 타입인 동영상 시청의 경우, 교통 밀집도 간 가장 큰 폭으로 증가하며, 그 다음 시각의 모달리티의 리딩과 모디터링, 청각의 통화하기와 상식퀴즈게임, 마지막으로 운동근육의 타입핑이 오히려 교통 밀집도가 낮은 경우의 반응시간이 높았지만 그에 대한 차이는 상대적으로 적게 나타났다.
3.2 Lateral position
반응시간에 대한 반복측도 분산분석 결과, Table 2와 같이 유의수준 0.05에서 교통 밀집도에 따란 유의한 차이는 발견되지 않았지만, NDRT에 따라 유의한 차이가 있는 것으로 나타났으며, 변수간 교호작용이 존재하지 않았다(Table 4).
|
Factor |
F |
p |
|
Traffic density |
1.449 (1, 0.030) |
0.244 |
|
NDRT modality |
3.091 (3, 0.033) |
0.035* |
|
Traffic density* NDRT modality |
0.558 (3, 0.004) |
0.645 |
또한, 측면 움직임에 대해서는 자율주행 전과 후로 대응표본 t-test 결과 Auditory 모달리티 외에 유의한 차이가 있는 것으로 나타났다. 자율주행 전보다 자율주행 후에 측면 움직임의 표준편차가 증가하였다(Table 5).
|
Factor |
t |
p |
|
Pre vs. Post (General) |
-5.593 |
<0.000* |
|
Pre vs. Post (Auditory) |
-0.108 |
0.274 |
|
Pre vs. Post (Auditory+Visual) |
-4.393 |
<0.000* |
|
Pre vs. Post (Visual) |
-3.942 |
<0.000* |
|
Pre vs. Post (Motoric) |
-3.988 |
<0.000* |
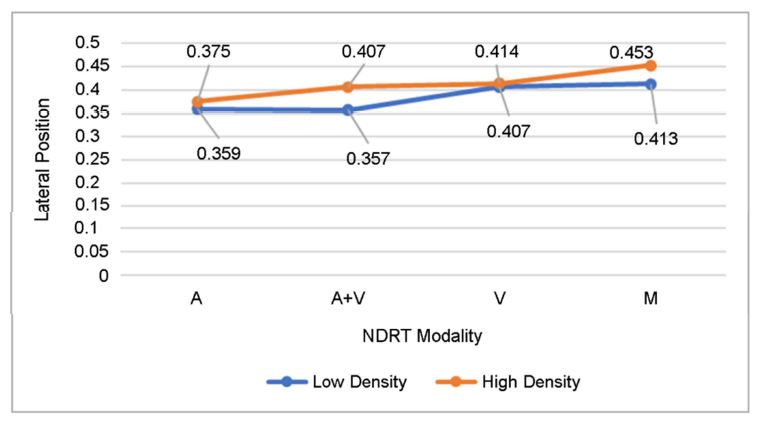
변수의 조합에 따라 측면 움직임의 평균 변화를 나타낸 Figure 2를 보면, 측면 움직임의 표준편차가 NDRT 모달리티에 따라서 증가하였다. 운동근육의 타입핑이 가장 높은 표준편차를 나타났고, 그 다음 시각의 모달리티의 리딩과 모디터링, 듀얼 모달리티 타입인 동영상 시청, 마지막으로 청각의 통화하기와 상식퀴즈게임 순으로 표준편차가 나타났다.
3.3 Short Stress State Questionnaire (SSSQ)
SSSQ에 대한 결과는 운전 태스크의 전과 후의 t-test 결과를 먼저 파악한 후, 각 세그먼트별로 반복측도 분산분석 결과를 알아보고자 한다. 첫 번째로, SSSQ에 대한 태스크 전과 후의 t-test 결과는 걱정(worry)를 제외하고 태스크 몰입(task engagement), 짜증(distress), 그리고 스트레스(stress) 유의하게 차이가 있는 것으로 나타났다(Table 6). 태스크 전과 후의 유의한 결과를 토대로, SSSQ에 대한 NDRT 모달리티 별 태스크 전과 후의 t-test 결과는 짜증(distress)를 제외하고 유의한 차이가 존재하였다(Table 7).
|
Factor |
t |
p |
|
Pre vs. Post (Task engagement) |
-7.435 |
<0.000* |
|
Pre vs. Post (Distress) |
-2.196 |
0.030* |
|
Pre vs. Post (Worry) |
-0.658 |
0.512 |
|
Pre vs. Post (Stress) |
-9.010 |
<0.000* |
|
Factor |
t |
p |
|
A - Pre vs. Post (Task engagement) |
-12.119 |
<0.000* |
|
A - Pre vs. Post (Distress) |
-0.795 |
0.431 |
|
A - Pre vs. Post (Stress) |
-4.249 |
<0.000* |
|
A+V - Pre vs. Post (Task engagement) |
-7.678 |
<0.000* |
|
A+V - Pre vs. Post (Distress) |
-1.484 |
0.154 |
|
A+V - Pre vs. Post (Stress) |
-6.498 |
<0.000* |
|
V - Pre vs. Post (Task engagement) |
1.183 |
0.224 |
|
V - Pre vs. Post (Distress) |
-0.53 |
0.599 |
|
V - Pre vs. Post (Stress) |
-5.472 |
<0.000* |
|
M - Pre vs. Post (Task engagement) |
-3.687 |
0.002* |
|
M - Pre vs. Post (Distress) |
-1.891 |
0.074 |
|
M - Pre vs. Post (Stress) |
-2.708 |
0.014* |
SSSQ의 태스크 몰입(task engagement)에 대한 반복측도 분산분석 결과, Table 8과 같이 유의수준 0.05에서 교통 밀집도를 제외하고, NDRT에 따라 유의한 차이가 있는 것으로 나타났으며, 변수간 교호작용이 존재하였다. 교호작용이 존재하므로 태스크 몰입(task engagement)에 대한 변수의 영향력을 검정하기 위해 post-hoc analysis를 수행하였다. 먼저 교통 밀집도를 제외하고, NDRT 모달리티에도 유의한 영향이 나타났으며 교통 밀집도와 NDRT 모달리티의 교호작용에도 visual과 motoric 모달리티 외에는 유의한 영향이 나타났다(Table 8, Table 9).
|
Factor |
F |
p |
|
Traffic density |
0.212 (1, 0.444) |
0.651 |
|
NDRT modality |
23.917 (3, 17.812) |
<0.000* |
|
Traffic density* NDRT modality |
9.053 (3, 6.37) |
0.002* |
|
Factor |
F |
p |
|
Traffic density (Low vs.
High) |
0.212 (1, 0.444) |
0.651 |
|
NDRT modality (Auditory
vs. Visual+Auditory) |
18.511 (1, 24.500) |
<0.000* |
|
NDRT modality
(Visual+Auditory vs. Visual) |
8.384 (1, 180) |
0.001* |
|
NDRT modality (Visual vs.
Motoric) |
37.942 (1, 56.889) |
<0.000* |
|
Traffic density* NDRT modality
(Visual vs. Visual+Auditory) |
11.333 (1, 32.000) |
0.004* |
|
Traffic density* NDRT modality
(Visual+Auditory vs. Visual) |
23.524 (1, 56.889) |
<0.000* |
|
Traffic density* NDRT modality
(Visual vs. Motoric) |
0.00 (1, 0.00) |
1 |
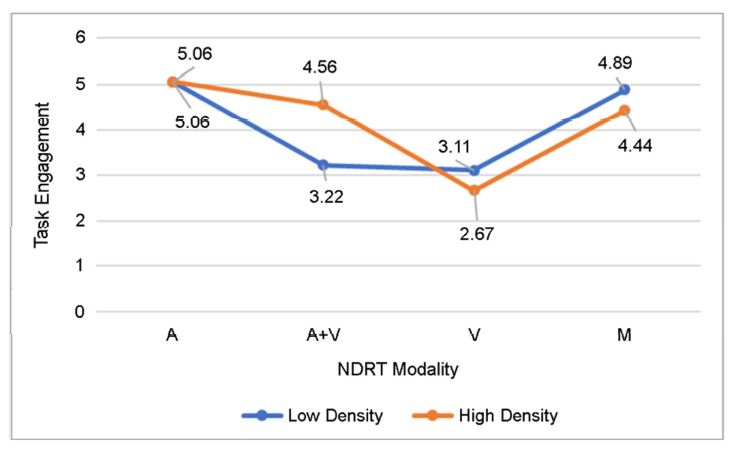
변수의 조합에 따라 태스크 몰입(task engagement)의 평균 변화를 나타낸 Figure 3를 보면, 태스크 몰입이 교통 밀집도와 NDRT 모달리티에 따라 달라진다. 청각의 통화하기와 상식퀴즈게임이 교통 밀집도에 관계없이 가장 높은 태스크 몰입 결과가 나왔으며, 그 다음 운동근육의 타입핑, 그 다음 듀얼 모달리티 타입인 동영상 시청은 교통 밀집도에 따라 가장 큰 차이를 보였으며, 마지막으로 시각의 모달리티의 리딩과 모디터링은 가장 낮은 태스크 몰입도를 나타냈다.
SSSQ의 스트레스(stress)에 대한 반복측도 분산분석 결과, Table 10과 같이 유의수준 0.05에서 교통 밀집도와 NDRT에 따라 유의한 차이가 있는 것으로 나타났으며, 변수간 교호작용은 존재하지 않았다.
|
Factor |
F |
p |
|
Traffic density |
7.991 (1, 11.111) |
0.012* |
|
NDRT modality |
3.351 (3, 4.898) |
0.026* |
|
Traffic density* NDRT modality |
2.042 (3, 2.833) |
0.120 |
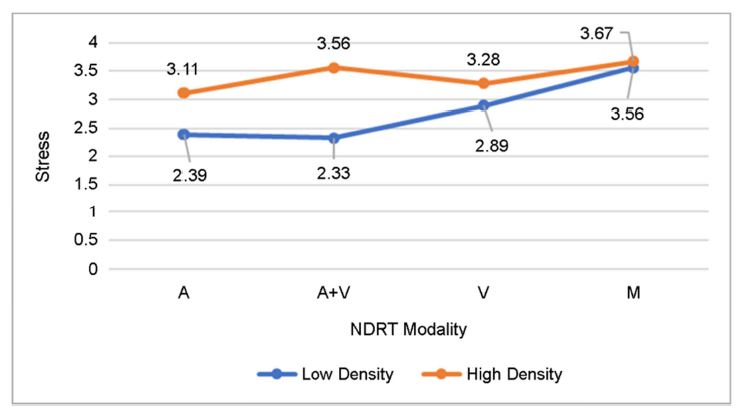
변수의 조합에 따라 스트레스의 평균 변화를 나타낸 Figure 4를 보면, 태스크 몰입이 교통 밀집도와 NDRT 모달리티에 따라 달라진다. 운동근육의 타입핑이 가장 높은 스트레스를 나타냈는데 교통 밀집도가 낮은 경우가 높은 경우보다 높았지만 상대적으로 낮은 차이를 보였다. 그 다음 듀얼 모달리티 타입인 동영상 시청은 교통 밀집도에 따라 가장 큰 폭으로 증가하였으며, 그 다음 시각의 모달리티의 리딩과 모디터링, 마지막으로 청각의 통화하기와 상식퀴즈게임의 순서로 감소 폭이 줄어들었다.
본 연구는 교통 밀집도와 NDRT 모달리티에 관한 인터랙션과 운전자의 반응을 분석하였고, 자율주행 자동차의 조작권 이양 시나리오에서 사용자의 스트레스를 감소시키고 운전 태스크의 몰입을 증가시키기 위한 NDRT의 가이드라인을 제시하고자 하였다. 교통 밀집도에 따라 운전자의 NDRT 모달리티에 대한 반응을 운전 퍼포먼스와 주관적 스트레스 평가를 통해 파악하였다.
교통 밀집도에 따라 제어권 전환 시 반응시간은 차이가 뚜렷했지만, 측면 움직임에 있어서는 뚜렷한 차이가 발견되지 않았다. 교통 밀집도가 높아짐에 따라 반응시간이 증가하는 것은 기존 사전 연구와 일치한다(Radlmayr et al., 2014; Gold et al., 2016). 다만, 기존 연구의 반응시간보다 긴 반응시간의 결과가 도출되었다. 이에 대한 이유는 현실적인 NDRT의 제공과 비운전 태스크에서 운전으로 재개하는 집중(attention)을 고려한 경우, 10초 이상 45초 이하의 리드타임을 주어야 충분한 반응시간을 이끌어낼 수 있기 때문에 본 실험의 리드타임은 15초로 구성되었다. 기존 연구에서 제시한 5~7초보다 더 긴 시간에서 비롯된 결과이다(Wan and Wu, 2018). 또한, 리드타임이 45초 이상인 경우, 운전 태스크 및 운전 관련 작업 부하의 차이가 통계적으로 유의하지 않음을 증명하였다(Yun, 2019). 이는 리드타임에서 모니터링 혹은 NDRT를 하는 시간이 길어지기 때문이다. 리드타임에서 운전의 수행의 총량은 증가하지만 동시에 NDRT의 가용시간도 증가한다. 그렇기 때문에 45초 이하인 리드타임인 15초로 구성되었다.
특히 반응시간 중에서 두 가지 교통 밀집도의 청각 모달리티의 NDRT가 가장 빠른 반응시간으로 나타났다(3.76초, 4.14초). 이는 비시각적 NDRT이 시각적 NDRT에 비해 빠르다는 사전 연구의 결과와 일치한다(Gold et al., 2015; Petermeijer et al., 2017). 청각적 모달리티는 운전에 필요한 모달리티인 시각, 운동근육, 심지어 인지적 측면이 포함되어 있지 않으므로 제어권 전환할 경우 핸들을 바로 잡고 운전에 임할 수 있다. 또한, 청각적 모달리티의 NDRT는 두 가지 교통 밀집도에 상관없이 모두 태스크 몰입도가 가장 높았다(5.06점으로 동일). 이는 Neubauer (2014)와 같이 상식퀴즈게임과 휴대 전화 통화와 같은 미디어 사용의 태스크 이후의 몰입도(post-task engagement)가 가장 높게 나온 결과와 일치한다. 청각 모달리티의 NDRT는 운전 퍼포먼스에 긍정적인 영향을 줄 수 있는 가능성을 보여준다.
본 연구의 NDRT의 모달리티에 따른 유의한 차이 결과는 중자원 이론(multiple resource theory)의 중다자원 구조(multiple resource structure)의 내용과 부합한다. 중자원 이론(multiple resource theory)은 여러 작업이 서로 다른 모달리티를 사용할 때 성능이 저하되지 않아야 한다고 주장한다(Wickens, 2002). 이런 맥락에서 주로 시각적, 운동근육의 모달리티로 구성된 운전 태스크는 NDRT의 시각과 운동근육의 모달리티의 경우보다 청각 위주의 모달리티에서 방해가 적었음을 증명하였다. 구체적으로 NDRT의 태스크 중 청각 모달리티가 시각 모달리티보다 운전 퍼포먼스가 높았고, 태스크 몰입도 또한 높았다. 더욱이 청각 태스크에 비해 운동근육의 태스크가 운전을 더 방해하는데, 자료 입력을 위해 시각적 피드백 처리에 의존해야 하는 타입핑과 같은 태스크는 특히 더 그러하였다(Wickens, 2002). 이는 타입핑인 운동근육 모달리티의 경우, 높은 교통 밀집도의 듀얼 태스크의 반응시간을 제외하고는 제어권 전환의 리드타임이 모두 높았다. 측면 움직임은 교통 밀집도에 관계없이 가장 높았으며, 스트레스 또한 같은 결과이다. 마지막으로, 시청각으로 이루어진 듀얼 모달리티인 비디오 시청의 경우 교통이 복잡하면 제어권 전환의 반응시간이 가장 길었으며, 스트레스의 결과 또한 가장 높은 결과는 다중 태스크가 될수록 운전의 방해 요인임을 증명하였다. 이는 자원이 제한적으로 할당된 상태에서 운전자가 덜 몰입하는 과제들에 비해 더 몰입하는 과제가 운전에 더 많이 방해하는 것을 발견하였다.
이러한 몰입을 통해 안전하게 운전하기 위한 방안으로는 청각적 NDRT가 자율주행의 지루함을 줄이고 운전 퍼포먼스의 질을 높일 수 있는 방안이 가능하다. 이러한 방안은 현재 인공지능 음성인식 기능이 차량내 탑재되어 있는 신형승용차의 경우에서 나타나듯이 수동 주행 뿐만 아니라 앞으로 진행될 자율주행 기능 내에서도 운전자에게 수동과 자율주행의 연결성을 부여할 수 있다(HMG Journal, 2019). 이는 자동차의 모든 기능을 안전하게 제어하고, 궁극적으로 다양한 타입의 청각적 NDRT를 통하여 운전자에게 몰입을 유지할 수 있는 방안을 제시할 수 있다.
조건부 자율주행에서는 운전자가 운전자가 자율주행 시스템과의 지속적인 상호작용이 필요하다. 운전자는 자율주행 시 운전과 관련 없는 태스크를 진행하면서 지루함을 저하시키고, 자율 시스템이 제어권 전환을 요청할 때 운전을 재개할 수 있는 태스크 몰입을 유지한다. 특히 청각적 NDRT가 운전 태스크에 긍정적인 영향을 미치는 것으로 파악되어, 차량 내 인터페이스 디자인을 하는 경우, 청각 위주의 모달리티를 사용 및 응용하여 운전 퍼포먼스를 높일 수 있는 방안을 제시할 수 있음을 알 수 있었다.
References
1. Alm, H. and Nilsson, L., The effects of a mobile telephone task on driver behaviour in a car following situation. Accident Analysis & Prevention, 27(5), 707-715, 1995.
Crossref
Google Scholar
2. Department of Transportation. Bureau of transportation statistics 2007. Retrieved December 1, 2018, from http://www.rita.dot.gov/ bts/publications/national_transportation_statistics/html/table_01_11.html
3. Desmond, P.A., Hancock, P.A. and Monette, J.L., Fatigue and automation-induced impairments in simulated driving performance. Transportation Research Record, 1628, 8-14, 1998.
Google Scholar
4. e-index, Statistics of Traffic Accident (dead, injured) 2017., http://www.index.go.kr/potal/main/EachDtlPageDetail.do?idx_cd=1614 (Retrieved April 2, 2019).
Crossref
5. Gamberini, L., Spagnolli, A., Miotto, A., Ferrari, E., Corradi, N. and Furlan, S., Passengers' activities during short trips on the London Underground. Transportation, 40(2), 251-268, 2013.
Crossref
Google Scholar
6. Gershon, P., Ronen, A., Oron-Gilad, T. and Shinar, D., The effects of an interactive cognitive task (ICT) in suppressing fatigue symptoms in driving. Transportation Research Part F, 12, 21-28, 2009.
Google Scholar
7. Gold, C., Berisha, I. and Bengler, K., Utilization of drivetime-performing non-driving related tasks while driving highly automated. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Vol. 59, No. 1, pp. 1666-1670), Los Angeles, CA, 2015.
Google Scholar
8. Gold, C., Lorenz, L. and Bengler, K., Influence of automated brake application on take-over situations in highly automated driving scenarios FISITA World Automotive Congress, Maastricht, Netherlands., 2014.
Google Scholar
9. Gold, C., Körber, M., Lechner, D. and Bengler, K., Taking over control from highly automated vehicles in complex traffic situations: the role of traffic density. Human Factors, 58(4), 642-652, 2016.
Google Scholar
10. Hancock, P.A. and Verwey, W.B., Fatigue, workload and adaptive driver systems. Accident Analysis and Prevention, 29, 495-506, 1997.
Crossref
Google Scholar
11. Heenan, A., Herdman, C.M., Brown, M.S. and Robert, N., Effects of conversation on situation awareness and working memory in simulated driving. Human Factors, 56, 1077-1092, 2014.
Google Scholar
12. Helton, W.S., Validation of a short stress state questionnaire. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Vol. 48, No. 11, pp. 1238-1242). Los Angeles, CA., 2004.
Google Scholar
13. HMG Journal, https://blog.hmgjournal.com/Tech/hyundai-sonata-kakao-i.blg (Retrieved April 12, 2019).
14. Lee, J.D., Driving safety. In Nickerson, R.S. (Eds.), Reviews of Human Factors and Ergonomics, Human Factors and Ergonomics Society (pp. 172-218), Santa Monica, CA., 2006.
Crossref
15. Lyons, G., Jain, J., Susilo, Y. and Atkins, S., How do rail travelers use their time?: A comparison of national (rail) passenger survey findings between 2004 and 2010, 2011.
Google Scholar
16. Matthews, G., Towards a transactional ergonomics for driver stress and fatigue. Theoretical Issues in Ergonomics Science, 3, 195 -211, 2002.
Crossref
Google Scholar
17. Matthews, G., Campbell, S.E., Falconer, S., Joyner, L., Huggins, J., Gilliland, K., Grier, R. and Warm, J.S., Fundamental dimensions of subjective state in performance settings: Task engagement, distress and worry. Emotion, 2, 315-340, 2002.
Crossref
Google Scholar
18. Matthews, G. and Desmond, P.A., Task-induced fatigue states and simulated driving performance. The Quarterly Journal of Experimental Psychology, 55A, 659-686, 2002.
Crossref
Google Scholar
19. Neubauer, C., Alertness Maintaining Tasks: A Fatigue Countermeasure During Vehicle Automation?, Doctoral dissertation, University of Cincinnati, 2014.
Crossref
Google Scholar
20. Neubauer, C., Matthews, G., Langheim, L.K. and Saxby, D.J., Fatigue and voluntary utilization of automation in simulated driving. Human Factors, 54, 734-746, 2012a.
Crossref
Google Scholar
21. Neubauer, C., Matthews, G. and Saxby, D.J., The effects of cell phone use and automation on driver performance and subjective state in simulated driving. Proceedings of the Human Factors and Ergonomics Society, 56, 1987-1991, 2012b.
Google Scholar
22. NHTSA. Distracted driving 2011. Traffic safety facts: Research note, DOT HS 811 737. Washington, DC: NHTSA, 2013.
23. Parasuraman, R., Human-computer monitoring. Human Factors, 29(6), 695-706, 1987.
Google Scholar
24. Parasuraman, R., Mouloua, M. and Molloy, R., Effects of adaptive task allocation on monitoring of automated systems. Human Factors, 38(4), 665-679, 1996.
Crossref
Google Scholar
25. Petermeijer, S., Doubek, F. and de Winter, J., Driver response times to auditory, visual, and tactile take-over requests: A simulator study with 101 participants. IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2017.
Google Scholar
26. Public data. Statistics of Traffic Accident 2017., https://www.data.go.kr/dataset/15022347/fileData.do (Retrieved April 2, 2019).
27. Radlmayr, J., Gold, C., Lorenz, L., Farid, M. and Bengler, K., How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. In Proceedings of the Human Factors and Ergonomics Society 58th Annual Meeting (pp. 2063-2067). Santa Monica, CA., 2014.
Google Scholar
28. Stanton, N.A. and Young, M.S., Driver behaviour with adaptive cruise control. Ergonomics, 48, 1294-1313, 2005.
Crossref
Google Scholar
PubMed
29. Saxby, D.J., Matthews, G., Warm, J.S., Hitchcock, E.M. and Neubauer, C., Active and passive fatigue in simulated driving: Discriminating styles of workload regulation and their safety impacts. Journal of Experimental Psychology, 19, 287-300, 2013.
Crossref
Google Scholar
30. Sivak, M. and Schoettle, B., Motion sickness in self-driving vehicles, The University of Michigan Transportation Research Institute, 2011.
Google Scholar
31. Verwey, W.B. and Zaidel, D.M., Preventing drowsiness accidents by an alertness maintenance device, Accident Analysis and Prevention, 31, 199-211, 1999.
Google Scholar
32. Wan, J. and Wu, C., The Effects of Lead Time of Take-Over Request and Nondriving Tasks on Taking-Over Control of Automated Vehicles. IEEE Transactions on Human-Machine Systems, (99), 1-10, 2018.
Google Scholar
33. Wickens, C.D., Multiple resources and performance prediction. Theoretical Issues in Ergonomics Science, 3, 159-177, 2002.
Google Scholar
34. Wickens, C.D., Hollands, J.G., Banbury, S. and Parasuraman, R., Engineering psychology & human performance. Psychology Press, 2015.
Google Scholar
35. Yun, Y.D., Effects of Takeover Request Lead Time to Driver Workload in Autonomous Driving. JESK, Journal of Ergonomics Society of Korea, 38(2), 2019.
PIDS App ServiceClick here!