eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Jeong Bae Ko
, Jeong Shick Yoon
, Chang Ki Lee
, Tae Min Byeon
, Jae Soo Hong
10.5143/JESK.2019.38.6.419 Epub 2020 January 01
Abstract
Objective: Based on the 3D motion capture system, this study aims to determine the optimum position of IMU sensor used in dynamic balance evaluation.
Background: Dynamic balancing ability refers to the ability to balance while maintaining the center of gravity while the body is moving. Low dynamic balancing capabilities increase the likelihood of falls. Recently, research on the dynamic balance of the body using the miniaturized IMU sensor is actively underway. However, the existing dynamic balance studies have different IMU sensor attachment locations, and the study comparing and evaluating the accuracy of the evaluation results according to the IMU sensor attachment location is few.
Method: Timed Up and Go (TUG) evaluation was performed on six adults of different body sizes. The location of IMU sensors was selected from the literature survey by seven places (Sternum, L2, S2, Wrist and Shank) which are mainly used for dynamic balance assessment. The comparative analysis was performed by deriving the absolute error rate of the TUG evaluation between the 3D motion capture system and the 7 IMU sensors, the performance time of each stage of the TUG evaluation, walking speed, average walking time, and average walking time.
Results: TUG evaluation overall performance time absolute percentage error was the lowest at 1.4% in the middle of the sternum. The absolute percentage error for performing sub-task of the TUG evaluation was similar to 7.9% and 7.5%, respectively, at the sternum and at the L2. The absolute percentage error of the mean walking speed was the lowest on L2 (4.6%). The mean step time absolute percentage error was similar to 2.7%, 2.8%, and 2.9%, respectively, in the trunk (Sternum, L2 and S2). The absolute percentage error of the mean stride time was the lowest at 1.7 percent at L2.
Conclusion: The absolute percentage error tends to be relatively small when attaching an IMU sensor to the trunk (Sternum, L2 and S2) during dynamic balance evaluation in laboratory environments.
Application: The results of this study can be used as a basic data for considering the location of IMU sensors in the study of dynamic balance based on IMU sensor.
Keywords
Dynamic balance Inertial measurement unit Motion capture system Timed Up and Go (TUG)
동적 균형 능력은 인간이 일상 생활을 수행하기 위한 필수적인 요소 중 하나다. 동적 균형 능력은 몸이 움직이는 동안 무게 중심을 유지시키면서 균형을 조정하는 능력을 말한다(Raymakers et al., 2005). 동적 균형 능력은 가만히 서있는 동작부터 걷기나 짐 옮기기와 같은 복잡한 동작을 수행하는데 크게 관여한다(Dunsky et al., 2017). 동적 균형 능력이 저조할 시 낙상이 발생할 가능성이 증가하며 낙상 발생 시 건강과 신체 활동의 악화로 인해 삶의 질이 저하될 수 있다(Najafi et al., 2010). 따라서 비만 환자, 노인, 파킨슨병 환자 같은 낙상 고위험군의 낙상 위험도를 평가하기 위해 동적 균형 능력 측정이 수행되어야 한다.
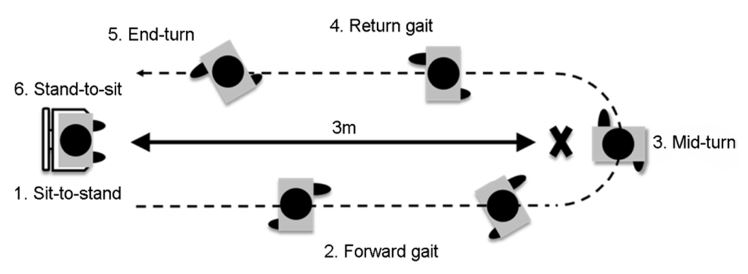
동적 균형 측정을 위한 대표적인 평가 방법으로 Timed Up and Go (TUG) test, Four Square Step Test (FSST)와 Six minute walking test 등이 있다. 그 중 1991년도에 Podsiadlo와 Richardson에 의해 보고된 TUG test는 동적 균형 능력을 평가하기 위해 전 세계에서 보편적으로 사용되고 있다(Berg et al., 1992; Zampieri et al., 2010; Cimolin et al., 2019). TUG test는 의자에서 일어나(Sit-to-stand) 3m 보행(Forwad gait)하고 돌아서(Mid-turn) 3m 보행(Return gait)한 뒤 전방으로 돌아(End-turn) 의자에 다시 앉는(Stand-to-sit) 평가이다(Podsiadlo and Richardson, 1991). TUG test는 전체 수행 시간과 각 구간 별 시간을 확인하는 비교적 간단한 방법으로 노인의 낙상의 위험도나 파킨슨병 환자의 동적 균형 능력을 파악할 수 있다.
초기 동적 균형 능력 측정은 설문지나 육안 관찰법을 통해 주관적으로 평가되었기 때문에 평가자의 주관적인 해석이나 실험 결과의 왜곡이 발생할 가능성이 존재했다(Zakaria et al., 2013). 이러한 단점을 보완하기 위해 최근 3차원 모션 캡쳐 시스템이나 IMU 센서를 사용하여 객관적이고 정량적인 동적 균형 측정이 수행되고 있다. 3차원 모션 캡쳐 시스템은 사용자의 신체에 부착된 반사 마커를 적외선 카메라가 인식하고 3차원 좌표를 직접 추출하는 시스템이기 때문에 정확한 측정값을 확보할 수 있다. 그러나 실험실과 같은 제한된 공간에서만 사용 가능하고 설치하기 위한 많은 비용이 사용되며 장비를 운용할 전문 인력이 상시 필요하다는 단점이 있다(Beyea et al., 2017). IMU 센서는 가속도계, 각속도계, 지자기계로 이루어져 있으며 이동 물체의 가속도와 각속도의 측정이 가능하다. IMU 센서는 3D 모션 캡쳐 시스템에 비해 데이터의 정확도가 비교적 열등하나, 공간에 따른 영향이 작고 사용자의 일상 생활 모니터링이 가능하며 보관 및 설치가 용이하기 때문에 최근 동적 균형 능력 측정 연구에서 활발하게 활용되고 있다(Beyea et al., 2017).
그러나 IMU 센서를 활용하여 동적 균형 능력 측정한 선행 연구를 살펴보면, 연구마다 상이한 IMU 센서의 부착 위치를 확인할 수 있다. Latt 등 (2009)은 고령자 중 낙상 경험자와 낙상 무경험자 간 보행 안정성을 비교하기 위해 IMU 센서를 정수리와 골반 부위에 부착하고 10m 직선 보행 평가를 수행하여 분석하였다. Zampieri 등 (2010)은 파킨슨병 환자를 대상으로 동적 균형 능력을 측정하기 위해 IMU 센서를 손목과 발목에 부착 후 TUG 평가를 하였으나 Palmerini 등 (2013)은 파킨슨병 환자를 대상으로 IMU 센서를 L5 위치에 부착 후 TUG 평가를 수행하였다. Cimolin 등 (2019)은 비만인 성인 여성을 대상으로 한 TUG 평가 시 IMU 센서를 L2 위치에 부착하였고 Belluscio 등 (2019)는 다운증후군과 프레더윌리 증후군을 가진 어린이를 대상으로 IMU 센서를 복장뼈, 골반, 발목에 부착하여 10m 직선 보행 평가를 수행하였다.
이상의 연구와 같이 IMU 센서를 활용한 동적 균형 능력 측정과 관련된 연구는 많이 수행되었으나 IMU 센서의 위치에 따른 동적 균형 측정값을 비교한 연구는 미미하다. 따라서 본 연구에서는 선행 연구 조사를 통해 동적 균형 능력 측정 연구에서 주로 사용되는 IMU 센서의 위치를 탐색하고 3차원 모션 캡쳐 시스템을 기반으로 문헌 조사를 통해 탐색한 IMU 센서의 부착 위치 간 측정값을 비교하고 최적의 IMU 센서 부착 위치를 탐색하기 위해 연구를 수행하였다.
2.1 Literature review
선행 연구에서 동적 균형 측정 시 주로 사용되는 IMU 센서의 위치를 탐색하기 위해 Scopus, PubMed와 Google scholar를 통해 문헌을 검색하였다. 검색은 키워드 조합을 통해 수행하였다. 키워드 검색식은 (balance or "dynamic balance") and ("inertial measurement unit" or wearable or accelerometer or gyroscope) and ("timed-up-and-go" or TUG)를 사용하였다. 문헌은 Scopus에서 74건, PubMed에서 44건, Google scholar에서 50건이 검색되었다. 검색된 168건의 문헌 중 관련 문헌 1차 선별을 위해 출판 연도가 2000년도 이전인 문헌과 중복된 문헌을 제외하였으며 제목 검토를 통해 본 연구와 관련된 문헌 74건을 선별하였다. 1차 선별된 74건 문헌 중 초록을 검토하여 센서 기반 동적 균형을 연구한 53건의 문헌을 입수하였고 문헌 전체 검토를 통해 최종적으로 다양한 동적 균형 평가 방법 중 IMU 센서나 가속도 혹은 자이로 센서를 기반으로 보행 안정성 평가나 TUG 평가를 수행한 연구에 대한 30건의 문헌을 선별하였다(Table 1).
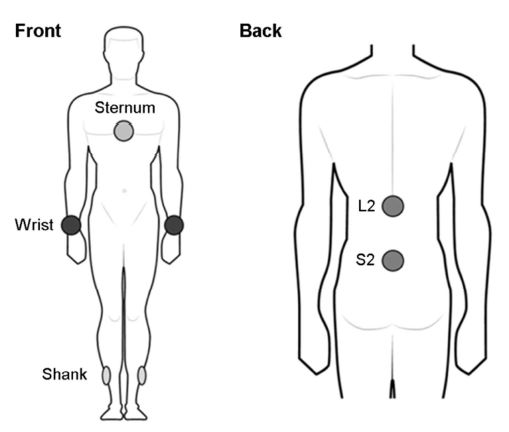
30건의 문헌에서 각 연구마다 수행한 동적 균형 평가 방법에 따라 사용된 센서의 신체 부착 위치를 파악하였다. 보행 안정성 평가를 수행한 연구는 13건이었으며 사용된 센서의 부착 위치는 연구마다 머리, 손목, 요추 부위, 정강이, 발목, 발로 다양하다. TUG 평가를 수행한 연구는 17건이었으며 요추 부위, 복장뼈 중앙(Sternum), 정강이(Shank), 발목이 주요 센서 부착 위치로 파악되었다. 선행 연구 조사를 통해 본 평가에 사용할 IMU 센서 최적 위치 후보로 복장뼈 중앙, Second lumbar vertebra (L2), Second sacral vertebra (S2), 양쪽 손목(Wrist)과 양쪽 정강이 측면을 선정하였다(Figure 1).
|
Author |
Type of
sensor |
Number of |
Position |
Task |
|
Sekine et al., 2004 |
3D
Accelerometer |
1 |
S1 |
50m
straight walking |
|
Latt et al., 2009 |
3D Accelerometer |
2 |
Head,
Sacrum |
10m
straight walking |
|
Lowry et al., 2009 |
3D
Accelerometer |
1 |
L2 |
18m
straight walking |
|
Lowry et al., 2010 |
3D
Accelerometer |
1 |
L3 |
18m
straight walking |
|
Chiari, 2011 |
3D
Accelerometer |
1 |
L5 |
TUG
test |
|
Yang et al., 2011 |
3D Accelerometer |
1 |
Lateral
pelvis |
TUG
test, 5m walking test |
|
Sant'Anna, 2011 |
IMU
sensor |
4 |
Shank,
Wrist |
30m
walking test |
|
Fazio et al., 2013 |
3D Accelerometer |
3 |
Sternum, Back pelvis |
25m walking test |
|
Tmaura et al., 2013 |
IMU
sensor |
3 |
L2,
Thigh |
TUG
test |
|
Najafi et al., 2013 |
3D
Accelerometer |
1 |
Sternum |
TUG
test |
|
Zakaria et al., 2013 |
IMU
sensor |
1 |
L2 |
TUG
test |
|
Palmerini et al., 2013 |
3D
Accelerometer |
1 |
L5 |
TUG
test |
|
Mirelman et al., 2013 |
3D
Accelerometer |
1 |
Lower
back |
20m
walking test |
|
Mirelman et al., 2014 |
IMU
sensor |
1 |
Lower
back |
TUG
test |
|
Weiss et al., 2015 |
3D
Accelerometer |
1 |
Lower
back |
3
day gait assessment |
|
Sejdic et al., 2014 |
3D Accelerometer |
1 |
L3 |
3-minute treadmill |
|
Herman
et al., 2014 |
3D Accelerometer |
1 |
Lower back |
30m walking test |
|
Trojaniello
et al., 2014 |
IMU sensor |
5 |
Sternum, Pelvis, L5, Right side waist |
Walking test |
|
Toosizadeh
et al., 2015 |
3D Accelerometer |
1 |
Sternum |
Gait, TUG test, Upright standing test |
|
Vervoort
et al., 2016 |
IMU sensor |
1 |
L3 |
TUG test |
|
Na
et al., 2016 |
IMU sensor |
1 |
L5 |
TUG test |
|
Storm
et al., 2016 |
IMU sensor |
3 |
L5, Ankle |
20m, 50m walking test |
|
Sankarpandi
et al., 2017 |
IMU sensor |
6 |
Wrist, Sternum, Chest, Shank |
TUG test |
|
Simila
et al., 2017 |
3D Accelerometer |
2 |
Lower back, Right hip |
TUG test |
|
Ponti
et al., 2017 |
3D Accelerometer |
1 |
Waist |
TUG test |
|
Beyea
et al., 2017 |
IMU sensor |
1 |
T2-T3 Spine |
TUG test |
|
Kleiner
et al., 2018 |
IMU sensor |
1 |
L5 |
TUG test |
|
Ortega-Bastidas et al., 2019 |
IMU sensor |
1 |
L3 |
TUG test |
|
Cimolin
et al., 2019 |
IMU sensor |
1 |
L2 |
TUG test |
|
Belluscio
et al., 2019 |
IMU sensor |
4 |
Sternum, Pelvis, |
10m walking test |
2.2 Subjects
본 연구에서는 거동에 불편함 없는 건강한 성인 6명을 신체 크기에 따라 구분하여 실험 참여자를 모집하였다. 신체 크기는 한국인 남성을 대상으로 제7차 한국인인체치수조사 결과를 통해 신장과 몸무게 분포를 고려하여 Small, Medium, Large 그룹으로 구분하였다(Korean Agency for Technology and Standards, 2015). Small 그룹은 신장 169.0cm 이하, 체중 71.9kg 이하, Medium 그룹은 신장 169.0cm 초과 176.8 미만, 체중 71.9kg 초과 86.3kg 미만, Large 그룹은 신장 176.8cm 이상, 체중 86.3kg 이상으로 구분하였고, 각 신체 크기 그룹별 2명씩 모집하였다. 자발적으로 지원한 피실험자 중 근골격계 질환이 있는 자, 정신적 질환이 있는 자나 실험 진행자가 판단하여 실험 참여가 어려운 자는 실험에서 제외하였다. 본 실험은 보건복지부 지정 공용기관생명윤리위원회의 심사를 통해 승인되었다(P01-201902-13-001).
2.3 Measurement system
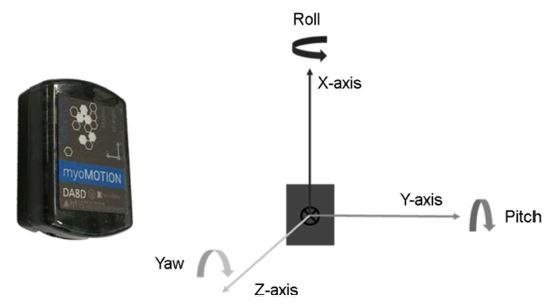
TUG 평가 시 IMU 센서의 최적 위치를 판별하기 위해 Research PRO IMU (Noraxon, USA)를 사용하였다(Figure 2). 본 센서는 3축 가속도계와 자이로스코프로 이루어져 있다. 가속도계는 3축(전후방, 측방, 수직 방향)으로 ±16G까지 측정 가능하고 최대 샘플링 레이트는 400Hz이다. 자이로스코프는 yaw, pitch, roll 방향으로 ±2,000 deg/s까지 측정 가능하고 최대 샘플링 레이트는 400Hz이다. MR3.14 32 (Noraxon, USA) 소프트웨어를 사용하여 저장된 데이터를 확인하고 데이터 분석에 활용하였다. 3차원 모션 캡쳐 시스템은 VICON MX-T20 적외선 카메라 12대를 사용하였고 Nexsus 2.8.2 (VICON, UK) 소프트웨어를 사용하여 데이터를 분석하였다. 카메라 보정을 위해 TUG 평가 시작 전과 후에 Static standing test를 수행하고 촬영하였다. 본 평가에서는 IMU 센서와 3차원 모션 캡쳐 시스템의 샘플링 레이트를 100Hz로 설정하였다.
2.4 Experiment
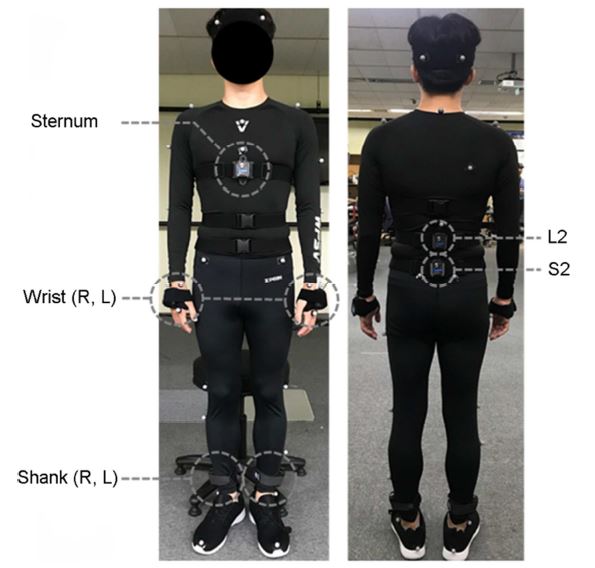
실험은 1991년 Podsiadlo와 Richardson에 의해 보고된 TUG 평가를 기반으로 수행하였다. TUG 평가는 동작 분석 실험이 가능한 넓은 실험실에서 수행되었다. 의자는 등받이가 있으며 팔걸이와 바퀴가 없는 의자를 사용하였다. 3m TUG 평가를 수행하였으며 반환점에 콘을 설치하였다(Figure 3). 평가를 수행하기 전에 피실험자는 Plug-in-gait 반사 마커 부착 방법에 따라 22개의 반사 마커를 부착하였고 선행 연구 조사를 통해 선별한 신체 7곳의 부위에 IMU 센서 7개를 각각 부착하였다(Figure 4). 마커는 양면 테이프를 사용하여 실험복에 부착하였다. IMU 센서는 네오프렌 밴드를 사용하여 피실험자의 몸에 결합시켰다. 마커 위치와 IMU 센서 위치는 중복되지 않았다. 마커와 센서 부착 후 본 평가 시작 전에 피실험자에게 TUG 평가 방법에 대해 설명하고 평가에 익숙하도록 연습 과정을 거쳤다. 본 평가는 3회 수행되었으며, 평소 걸음 속도로 실험 진행자의 '시작' 신호와 함께 평가가 진행되었다. 평가 종료 후에 모든 마커와 IMU 센서를 탈거하고 실험에 대한 의견을 수집하였다. 실험에 관련한 의견은 추후 연구를 위한 실험 환경 개선에 관련한 내용이었으며, 본 연구 결과에 활용하지 않았다.
2.5 Data analysis
TUG 평가는 각 피실험자마다 3회 반복 수행하였으며 분석에 사용한 데이터는 처음과 마지막 실험 결과를 제외한 중간 실험 결과를 활용하였다. TUG 평가는 전체 TUG 평가 수행 시간과 TUG 평가 하위 구간 수행 시간으로 앉았다 일어나는 시간(Sit-to-stand), 전방 보행 시간(Forward gait), 반환점을 기준으로 도는 시간(Mid-turn), 돌아 오는 보행 시간(Return gait), 앉기 전 도는 시간(End-turn), 다시 앉는 시간(Stand-to-sit)으로 구분하여 평가한다(Zakaria et al., 2013; Beyea et al., 2017). TUG 평가 하위 구간은 동작에 따라 7개의 구분점을 기반으로 나누어 진다. 7개의 구분점은 다음과 같다.
(1) 착석
(2) 기립 종료
(3) 전방 보행 종료
(4) 회전 종료
(5) 복귀 보행 종료
(6) 착석 전 회전 종료
(7) 착석
(1)과 (2)의 구분점 간 시간으로 Sit-to-stand 구간을 확인하고 (2)과 (3)의 구분점 간 시간을 통해 Forward gait 구간을 구분할 수 있다. 또한 (3)과 (4)의 구분점 간 시간으로 Mid-turn 구간을 확인하고 (4)와 (5)의 구분점 간 시간으로 Return gait 구간을 구분한다. (5)와 (6)의 구분점 간 시간으로 End-turn 구간을 확인하고 마지막으로 (6)과 (7)의 구분점 간 시간으로 Stand-to-sit 구간을 구분한다.
또한 보행과 관련된 변수들도 함께 확인하여 보행 능력을 평가한다. 선행 연구를 살펴보면, 평균 보행 속도, 평균 걸음(step) 시간, 평균 활보(stride) 시간이 보행 능력을 평가 하기 위해 주로 사용되었다(Zakaria et al., 2013; Vervoort et al., 2016). 평균 보행 속도는 Forward gait 구간과 Return gait 구간의 시간 데이터를 활용하여 각 구간 별 보행 속도를 도출하고 평균 보행 속도를 산출하였다. 보행 속도는 식 (1)을 통해 계산된다.
Speed = 3m / Walking time(s) (1)
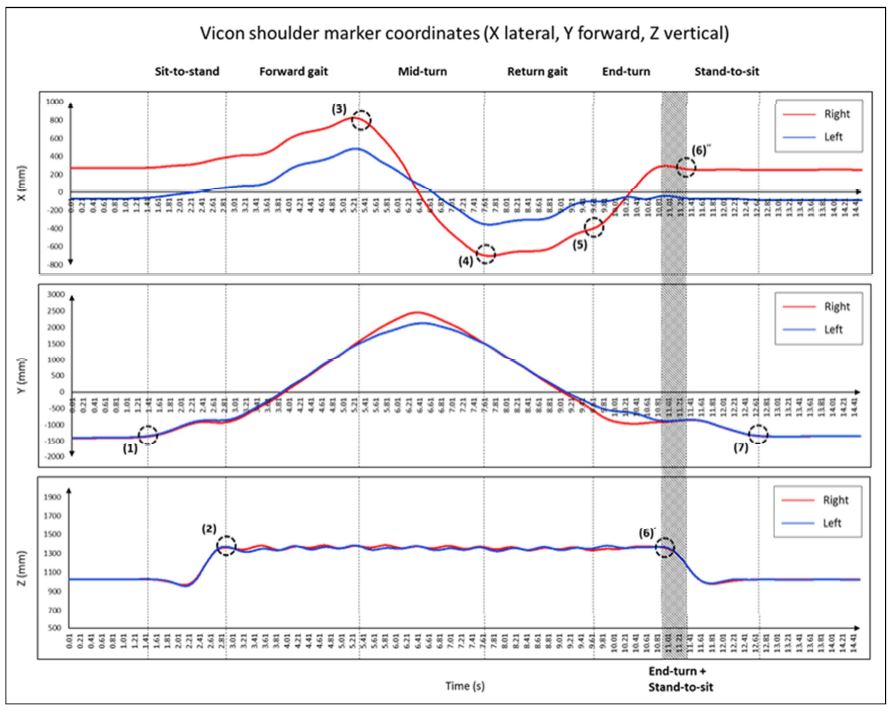
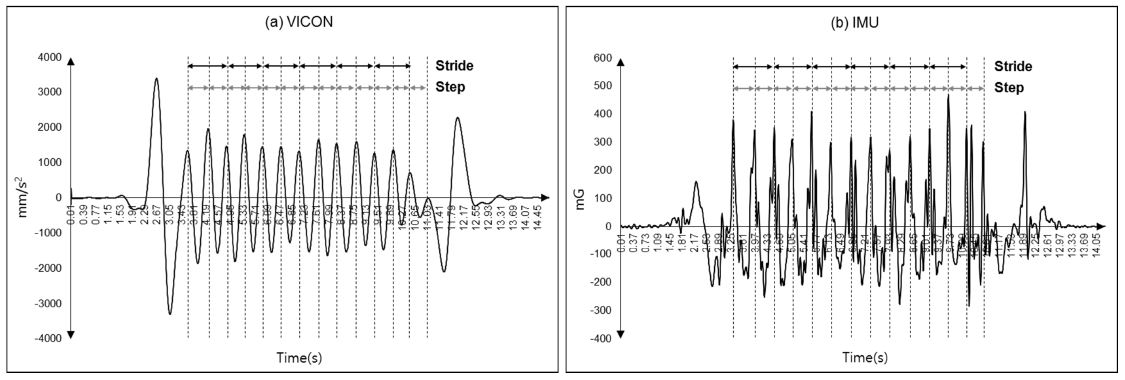
3D 모션 캡쳐 시스템에서 피실험자의 양측 어깨 마커 위치 데이터를 활용하여 TUG 평가 하위 구간 수행 시간과 전체 TUG 평가 수행 시간을 도출하였다(Figure 5). 착석 중일 때 마커의 위치 값은 일정하게 유지된다. 기립이 시작 될 때 Y축(전후 방향)의 위치 값이 증가하게 되고 TUG 평가 마지막 착석 시 감소하다가 일정하게 유지된다. 반환점 회전 구간은 X축(좌우 측방) 위치 값의 최대값과 최소값을 확인하여 구분하였으며, 착석 전 회전 구간은 오른쪽 어깨 마커의 위치 값이 급격히 증가하는 지점부터 일정하게 유지되는 구간까지 구분하여 파악하였다(Beyea et al., 2017). 도출된 TUG 하위 구간 수행 시간 중 보행 수행 시간을 통해 보행 속도를 도출하고 전방 보행 속도와 복귀 보행 속도를 활용하여 평균 보행 속도를 산출하였다. 또한 골반 부위 마커 위치에서 3축 가속도 데이터 중 Z축(수직 방향) 가속도 데이터를 활용하여 평균 걸음 시간, 평균 활보 시간을 도출하였다. 보행 수행 시간 중 가속도의 peak 값을 기준으로 걸음을 구분하였고 두 개의 걸음으로 활보 시간을 도출하고 전방 보행과 복귀 보행 중 걸음 시간과 활보 시간에 대한 평균을 산출하였다(Figure 7.a).
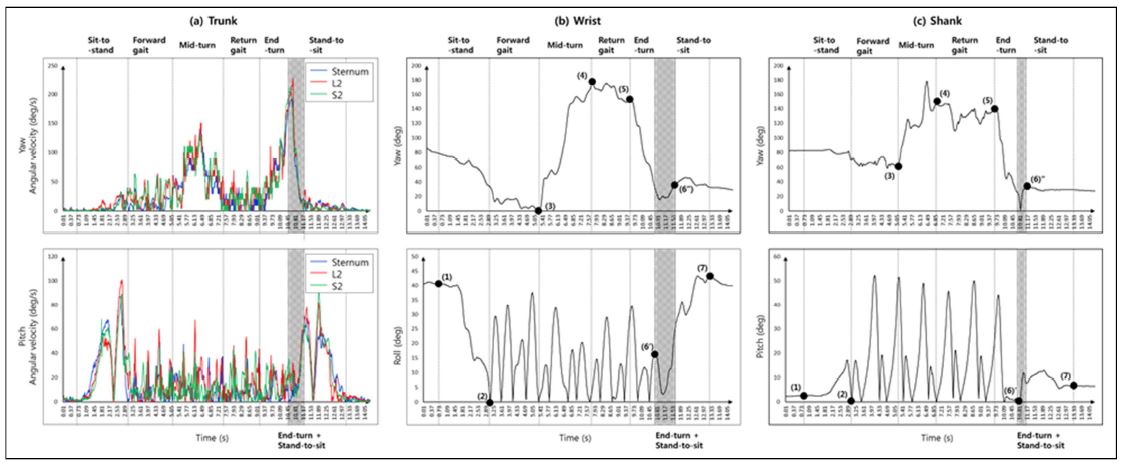
IMU 센서의 가속도와 각속도 신호는 Butterworth low-pass filter (10Hz, 4th order, zero-lag)를 통해 필터링 하였다(Beyea et al., 2017). IMU 센서의 데이터 기반 TUG 하위 구간 수행 시간 구분 방법은 IMU 센서의 위치에 따라 상이한 것을 확인하였다(Figure 6). Figure 6.a는 체간 위치 IMU 센서의 yaw와 pitch 방향 각속도 raw 데이터를 사용하고 정류화하여 TUG 평가 하위 구간을 구분한 것을 나타낸다. 회전과 관련된 동작(Mid-turn, End-turn) 수행 시 yaw 방향에서 각속도가 크게 증가하고 감소하는 경향을 확인하였다. 반면에 착석과 관련된 동작(Sit-to-stand, Stand-to-sit) 수행 시 pitch 방향에서 각속도가 크게 증가하고 감소하는 경향을 확인하였다. Figure 6.b는 손목 위치 IMU 센서에서 yaw와 roll 방향의 각도 raw 데이터를 활용하고 정류화하여 TUG 평가 하위 구간 구분 방법을 보여준다. 회전 관련 동작 시 yaw 방향의 각도가 큰 폭으로 증가하고 감소하는 경향을 확인하였다. 착석 관련 동작 시 roll 방향의 각도가 큰 폭으로 증가하고 감소하는 경향을 보였으며 보행 시 발생한 각도와 상이한 패턴을 나타냈다. Figure 6.c는 하지 위치 IMU 센서에서 yaw와 pitch 방향의 각도 raw 데이터를 사용하고 정류화하여 TUG 평가 하위 구간 구분 방법을 나타낸다. 회전 동작 시 yaw 방향의 각도가 극적으로 증가하고 감소하는 경향을 확인하였다. 착석 관련 동작 시 pitch 방향의 각도가 보행 시 발생한 각도 패턴과 상이한 패턴을 확인하였다. 기립(Sit-to-stand) 시작 시 각도 값이 증가하기 시작하고 기립 종료 시 각도 값이 0에 가깝게 감소하였다. 복귀 보행 종료 후 착석 시작 시 각도 값이 0에서 증가하기 시작하였고 착석 종료 시점은 각도가 일정해 지기 시작하는 지점을 확인하였다. 각 IMU 센서 위치마다 TUG 하위 구간 수행 시간을 기반으로 전체 TUG 평가 수행 시간을 도출하였다. 또한 TUG 하위 구간 수행 시간 중 보행 수행 시간을 통해 보행 속도를 도출하고 전방 보행 속도와 복귀 보행 속도를 활용하여 평균 보행 속도를 산출하였다. IMU 센서의 3축 가속도 데이터 중 Z축(수직 방향) 가속도 데이터를 사용하여 평균 걸음 시간, 평균 활보 시간을 도출하였다(Figure 7.b). TUG 하위 구간 수행 시간 구분을 통해 파악한 전방 보행, 복귀 보행 시 가속도 값을 활용하여 걸음+ 시간과 활보 시간을 구분하는 방법을 나타낸다. 걸음 시간 구분은 가속도의 peak 값을 기준으로 구분하였고 활보 시간은 두 걸음 시간의 합으로 도출하였다.
3차원 모션 캡쳐 시스템은 측정 정확도가 우수하기 때문에 선행 연구에서 신체 동작이나 균형을 평가하기 위한 gold standard reference technology 중 하나로 사용되고 있다(Beyea et al., 2017; Fusca et al., 2018). 따라서 본 연구에서는 3차원 모션 캡쳐 시스템의 데이터를 기준으로 IMU 센서의 위치 별 데이터의 정확도를 산출하기 위해 절대 오차율을 계산하였다. 절대 오차율은 평가 대상의 참값이 존재할 때 평가 대상과 참값 간의 오차율을 산출하여 평가 대상의 정확도를 평가하는 방법이다. 절대 오차율이 낮을수록 데이터의 정확도가 높다고 판단할 수 있다(Fusca et al., 2018). 절대 오차율은 식 (2)을 통해 계산된다.
Absolute percentage error = |At - Ft| / At × 100(%) (2)
식에서 At는 평가 대상의 참값이고 Ft는 평가 대상 값이다. 3차원 모션 캡쳐 시스템은 동적 균형 평가 시 높은 정확도의 데이터를 수집할 수 있다. 따라서 3차원 모션 캡쳐 시스템의 데이터를 참값으로 가정하고 평가 대상인 위치 별 IMU 센서의 데이터에 대해 절대 오차율을 산출하여 IMU 센서의 위치 별 데이터의 정확도를 평가하였다.
2.6 Statistical analysis
본 연구에서는 전체 TUG 평가 수행 시간, TUG 평가 하위 구간 수행 시간(TUG parameter)과 보행 관련 변수(Gait parameter) 별로 구분하여 IMU 센서의 위치 별 데이터 간 절대 오차율의 통계적 유의성과 신체 크기 간 통계적 유의성을 확인하기 위해 일반 선형 모형(General linear model)을 사용하였다. 여기에서 독립변수는 IMU 센서 위치와 신체 크기이며, 종속변수는 TUG parameter인 TUG 평가 수행 시간, TUG 평가 하위 구간 수행 시간과 Gait parameter인 평균 보행 속도, 평균 걸음 시간, 평균 활보 시간이다. 통계 분석은 Minitab 19 (Minitab, USA) 통계 분석 프로그램을 사용하여 수행하였다. 통계적 유의 수준은 p < 0.05로 설정하였다. IMU 센서 위치 별 데이터 간 절대 오차율의 통계적 차이 비교는 체간(Sternum, L2, Pelvis), 손목(Wrist), 하지(Shank)로 구분하고 IMU 센서의 위치 별 조합을 통해 통계적 유의성을 도출하였다.
3.1 Absolute percentage error of TUG total time and sub-task time
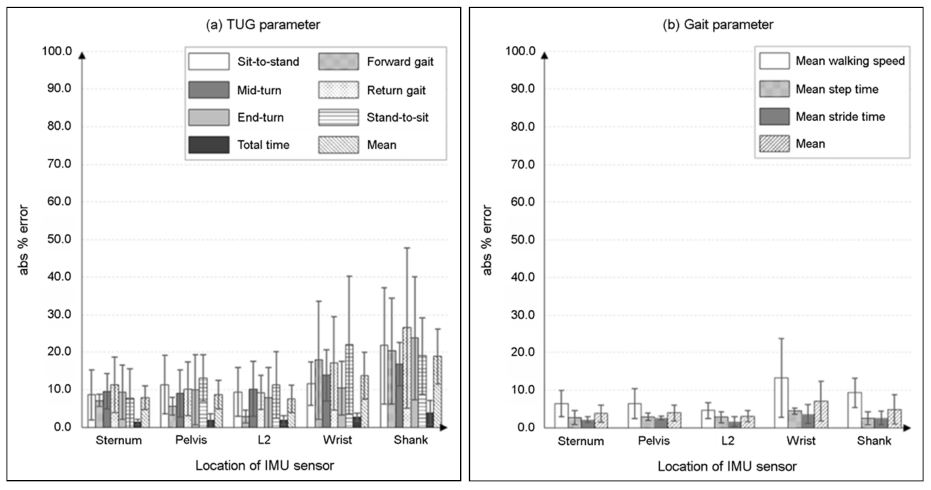
신체 크기에 따른 TUG parameter에 대한 IMU 센서 위치 별 절대 오차율은 통계적으로 유의한 차이가 없었으나(p > 0.05) IMU 센서 위치 간 절대 오차율은 통계적으로 유의한 차이를 확인하였다(p < 0.05) (Table 2). IMU 센서 위치 간 절대 오차율의 통계적 차이를 확인하기 위해 Tukey 쌍별 비교를 수행하였다(Table 3). Tukey 쌍별 비교를 확인해 보면, 체간의 IMU 센서 위치 간 절대 오차율은 구분되지 않았으나, 체간과 손목, 하지의 IMU 센서 위치 간 절대 오차율은 통계적으로 유의하게 구분되는 것을 확인하였다. 평균적으로 L2 위치가 절대 오차율 7.5%로 가장 낮았고 Shank 위치가 절대 오차율 18.8%로 가장 높았다. 전체 TUG 수행 시간은 Sternum 위치에서 1.4%로 가장 낮았다. TUG 하위 구간 별 수행 시간 절대 오차율을 살펴보면, Sit-to-stand 구간 수행 시간 오차율은 Sternum에서 8.6%로 가장 낮았다. Forward gait 구간 수행 시간 오차율은 L2 위치에서 2.9%로 가장 낮았다. Mid-turn 구간 수행 시간 오차율은 Pelvis에서 9.0%로 가장 낮았다. Return gait 구간 수행 시간 오차율은 L2 위치에서 9.2%로 가장 낮았다. End-turn 구간 수행 시간 오차율은 L2 위치에서 7.8%로 가장 낮았다. Stand-to-sit 구간 수행 시간 오차율은 Sternum 위치에서 7.7%로 가장 낮았다(Figure 8.a). Table 6은 전체 TUG 수행 시간과 TUG 하위 구간 수행 시간의 IMU 센서 위치 별 절대 오차율을 나타낸다.
|
Source |
DF |
Adj SS |
Adj MS |
F-value |
p-value |
|
Subject group |
2 |
0.042 |
0.021 |
2.54 |
0.082 |
|
Location of IMU |
4 |
0.397 |
0.099 |
11.89 |
0.000 |
|
TUG parameter |
6 |
0.320 |
0.533 |
6.37 |
0.000 |
|
Location of IMU |
N |
Mean |
Grouping |
|
Shank |
42 |
0.188 |
A |
|
Wrist |
42 |
0.136 |
B |
|
Second sacral vertebra |
42 |
0.087 |
C |
|
Sternum |
42 |
0.079 |
C |
|
Second lumbar vertebra |
42 |
0.075 |
C |
3.2 Absolute percentage error of gait parameter
신체 크기에 따른 Gait parameter들에 대한 IMU 센서 위치 별 절대 오차율은 통계적으로 유의한 차이가 없었으나(p > 0.05) IMU 센서 위치 간 절대 오차율은 통계적으로 유의한 차이를 확인하였다(p < 0.05) (Table 4). IMU 센서 위치 간 절대 오차율의 통계적 차이 비교를 위해 Tukey 쌍별 비교를 수행하였다(Table 5). Tukey 쌍별 비교를 확인해 보면, 체간의 IMU 센서 위치 간 절대 오차율은 통계적으로 유의하게 구분되지 않았다. 체간과 손목의 IMU 센서 위치 간 절대 오차율은 통계적으로 유의하게 구분되었으나, 체간과 하지의 IMU 센서 위치 간 절대 오차율은 구분되지 않았다. 평균적으로 L2 위치가 절대 오차율 3.0%로 가장 낮았고 Wrist 위치가 절대 오차율 7.1%로 가장 높았다. 평균 걸음 시간의 오차율은 Shank 위치에서 2.6%로 가장 낮았다. 평균 활보 시간의 오차율은 L2 위치에서 1.7%로 가 장 낮았다. 평균 보행 속도 오차율은 L2 위치에서 4.6%로 가장 낮았다(Figure 8.b). Table 7은 TUG 평가 수행 동안 평균 보행 속도, 평균 걸음 시간과 평균 활보 시간에 대한 IMU 센서 위치 별 절대 오차율을 나타낸다.
|
Source |
DF |
Adj SS |
Adj MS |
F-value |
p-value |
|
Subject group |
2 |
0.001 |
0.000 |
0.31 |
0.734 |
|
Location of IMU |
4 |
0.020 |
0.005 |
4.84 |
0.001 |
|
Gait parameter |
8 |
0.088 |
0.011 |
10.67 |
0.000 |
|
Location of IMU |
N |
Mean |
Grouping |
|
Shank |
54 |
0.050 |
B |
|
Wrist |
54 |
0.033 |
A |
|
Second sacral vertebra |
54 |
0.032 |
B |
|
Sternum |
54 |
0.029 |
B |
|
Second lumbar vertebra |
54 |
0.025 |
B |
|
Parameter |
Sternum |
S2 |
L2 |
Wrist |
Shank |
|
abs % error |
abs % error |
abs % error |
abs % error |
abs % error |
|
|
Sit-to-stand |
8.6 |
11.3 |
9.4 |
11.6 |
21.7 |
|
Forward gait |
7.1 |
5.6 |
2.9 |
17.9 |
20.3 |
|
Mid-turn |
9.5 |
9.0 |
10.2 |
13.8 |
16.8 |
|
Return gait |
11.3 |
10.2 |
9.2 |
17.1 |
26.4 |
|
End-turn |
9.4 |
9.9 |
7.8 |
10.4 |
23.7 |
|
Stand-to-sit |
7.7 |
13.1 |
11.3 |
21.9 |
19.0 |
|
Total time |
1.4 |
1.8 |
1.9 |
2.7 |
3.9 |
|
Mean |
7.9 |
8.7 |
7.5 |
13.6 |
18.8 |
|
SD |
3.2 |
3.8 |
3.7 |
6.2 |
7.3 |
|
Parameter |
Sternum |
S2 |
L2 |
Wrist |
Shank |
|
abs % error |
abs % error |
abs % error |
abs % error |
abs % error |
|
|
Mean walking speed |
6.4 |
6.4 |
4.6 |
13.2 |
9.3 |
|
Mean step time |
2.7 |
2.9 |
2.8 |
4.4 |
2.6 |
|
Mean stride time |
2.2 |
2.6 |
1.7 |
3.6 |
2.6 |
|
Mean |
3.8 |
4.0 |
3.0 |
7.1 |
4.8 |
|
SD |
2.3 |
2.1 |
1.5 |
5.3 |
3.9 |
본 연구는 동적 균형 능력 측정 평가 방법인 TUG 평가를 통해 3차원 모션 캡쳐 시스템 데이터를 기반으로 동적 균형 능력 측정 및 분석 시 최적의 IMU 센서 위치를 탐색하고자 하였다. TUG 평가는 신체 크기 별로 각 2명씩 피실험자를 모집하여 신체 크기와 최적의 IMU 센서 위치 간의 상관관계를 확인하였다. 최적의 IMU 센서 위치를 탐색하기 위해 30건의 선행 연구를 조사하여 동적 균형 측정 시 주로 사용되는 7곳의 위치를 선별하였다. 또한 3D 모션 캡쳐 시스템의 양측 어깨 마커와 골반 부위 마커의 위치, 가속도 데이터를 활용하여 TUG 평가 분석의 기준 데이터를 구축하였고, IMU 센서의 각도와 각속도 데이터를 활용하여 TUG 하위 구간 수행 시간을 구분하고 IMU 센서의 가속도 데이터를 사용하여 평균 걸음 시간, 평균 활보 시간, 평균 보행 속도를 도출하고 기준 데이터와 비교하여 절대 오차율을 계산하였다.
체간 위치의 IMU 센서 3곳을 비교한 결과, 절대 오차율은 유사한 경향을 보였으며 통계적으로도 유의한 차이가 확인되지 않았다. 반면에 체간 위치의 IMU 센서와 손목과 하지 위치의 IMU 센서의 절대 오차율을 계산한 결과, 전반적으로 체간 위치의 IMU 센서에서 작은 오차율을 확인하였다. 선정된 체간 3곳의 위치는 신체 무게 중심점을 대표하는 위치이기 때문에 이와 같은 결과가 도출된 것으로 사료된다. Mathie 등 (2004)은 가속도 센서 기반 신체 동작 측정 시 가속도 센서를 신체 무게 중심에 가깝게 위치시킬 때 다른 위치보다 정확한 결과를 도출할 가능성이 큰데, 그 이유는 신체 무게 중심에서 멀어질수록 진동이나 노킹에 취약하기 때문에 결과 왜곡 가능성이 증가한다고 보고하였다. 손목이나 하지 위치는 Sit-to-stand 구간이나 Stand-to-sit 구간에서 큰 절대 오차율이 파악되었는데, 이는 손목이나 하지 위치의 IMU 센서가 체간의 굴곡이나 신전 행동을 측정하기 어려운 위치이기 때문인 것으로 사료된다. 따라서 IMU 센서를 활용하여 TUG 평가와 같은 다양한 신체 동작이 결합된 동적 균형 평가 시 IMU 센서를 신체 무게 중심점과 가까운 위치에 부착하는 것이 보다 정확한 결과를 확보할 수 있을 것으로 사료된다.
하지 위치는 TUG parameter에서 평균 18.8%로 비교적 큰 절대 오차율을 나타냈으나, Gait parameter의 절대 오차율은 평균 4.8%로 낮은 절대 오차율을 나타냈다. Alvarez 등 (2012)은 보행 평가 측정 시 IMU 센서의 위치가 지면에 가까울수록 가장 정확한 측정이 가능하다고 보고하였다. Panebianco 등 (2018)은 보행 평가 시 IMU 센서의 측정 정확도가 발에 위치할 때 가장 정확하다고 보고하였다. 선행 연구 결과와 유사하게 본 연구에서도 보행 변수 측정에서 하지 위치의 IMU 센서가 비교적 정확한 경향을 나타냈다.
본 연구 결과는 향후 IMU 센서 기반 동적 균형 능력 측정 연구 시 IMU 센서의 위치 고려에 대한 기초 자료로써 활용될 수 있음에 의미를 가진다. IMU 센서를 활용한 동적 균형 능력 측정 시 적절한 위치를 제안함으로써 정확한 결과 도출에 도움을 줄 수 있으며, IMU 센서를 활용하여 일상 생활 동작 구분을 위한 향후 연구 시 IMU 센서 부착 위치에 대한 정보를 제공할 수 있다. 또한 고령자나 일반 성인의 균형과 관련한 일상 생활모니터링 시 개발될 수 있는 스마트 웨어러블 기기를 디자인하는데 있어서 위치에 대한 참고 자료로써 활용될 수 있다.
동적 균형 측정 시 신체 크기는 최적의 IMU 센서 위치를 판별하는데 큰 영향을 미치지 않은 것으로 확인되었다. 본 연구는 신체 크기 별로 소수의 인원을 모집하여 실험하였고 성인 남성만을 대상으로 수행하였기 때문에 실험 결과가 모든 사람을 대변한다고 보기 어렵다. 향후 연구에서 다수의 신체 크기가 다양한 피실험자를 모집하여 실험을 수행하고 보완할 계획이다. 또한 동적 균형 능력 평가 방법으로 TUG 평가만을 사용했으나, 6-minute walking test나 BBS 등과 같은 다양한 동적 균형 능력 평가 방법을 수행하고 정적 균형 능력 평가 방법인 Functional reach test나 quiet standing test 등을 수행하여 종합적인 동적 균형 능력 평가 시 사용될 수 있는 최적의 IMU 센서 위치를 평가할 예정이다.
본 연구는 동적 균형 측정 평가 방법인 TUG 평가를 통해 3차원 모션 캡쳐 시스템의 데이터를 기반으로 IMU 센서의 위치에 따라 데이터의 오차율이 상이한 것을 확인하였으며, TUG 수행 시간 절대 오차율과 보행 변수 측정 절대 오차율 모두 L2 위치에서 평균적으로 가장 낮은 결과를 얻었다. 또한 체간 위치의 IMU 센서들의 절대 오차율은 유사한 경향을 보였으며, 통계적으로 유의한 차이를 확인할 수 없었다. 그러나 체간 위치의 IMU 센서가 손목과 하지 위치의 IMU 센서보다 절대 오차율이 작은 경향을 확인하였고 통계적으로도 유의한 결과를 확인하였다. 따라서 본 연구를 통해 IMU 센서를 사용하여 TUG 평가 방법을 수행한 동적 균형 평가 시 체간 위치에 IMU 센서를 부착하는 것이 다른 위치보다 비교적 정확한 결과를 얻을 가능성이 높음을 알 수 있다.
References
1. Alvarez, J.C., Alvarez, D., Lopez A. and Gonzalez, R.C., Pedestrian navigation based on a waist-worn inertial sensor, Sensors, 12, 10536-10549, 2012, doi: 10.3390/s120810536.
Google Scholar
2. Belluscio, V., Bergamini, E., Salatino, G., Marro, T., Gentili, P., Iosa, M., Morelli, D. and Vannozzi, G., Dynamic balance assessment during gait in children with Down and Prader-Willi syndromes using inertial sensors, Human Movement Science, 63, 53-61, 2019, doi: 10.1016/j.humov.2018.11.010.
Google Scholar
3. Berg, K.O., Maki, B.E., Williams, J.I., Holiday, P.J. and Wood-Dauphinee, S.L., Clinical and laboratory measures of postural balance in an elderly population, Archives of Physical Medicine and Rehabilitation, 73(11), 1073-1080, 1992.
Google Scholar
4. Beyea, J., McGibbon, C.A., Sexton, A., Noble, J. and O'Connell, C., Convergent validity of a wearable sensor system for measuring sub-task performance during the timed up and go test, Sensors, 17(4), 934, 2017, doi: 10.3390/s17040934.
Google Scholar
5. Chiari, L., Wearable systems with minimal set-up for monitoring and training of balance and mobility, 33rd Annual International Conference of the IEEE EMBS Boston, 5828-5832, 2011, doi: 10.1109/IEMBS.2011.6091442.
Google Scholar
6. Cimolin, V., Cau, N., Albedi, G.M., Aspesi, V., Merenda, V., Galli, M. and Capodaglio, P., Do wearable sensors add meaningful information to the Timed Up and Go test? A study on obese women, Journal of Electromyography and Kinesiology, 44, 78-85, 2019, doi.org/10.1016/j.jelekin.2018.12.001.
Google Scholar
7. Dunsky, A., Zeev, A. and Netz, Y., Balance performance is task specific in older adults, BioMed Research International, 7-13, 2017, https://doi.org/10.1155/2017/6987017.
Google Scholar
8. Fazio, P., Granieri, G., Casetta, I., Cesnik, E., Mazzacane, S., Caliandro, P., Pedrielli, F. and Granieri, E., Gait measures with a triaxial accelerometer among patients with neurological impairment, Neurological Sciences, 34(4), 435-40, 2013, doi: 10.1007/s10072-012-1017-x.
Google Scholar
9. Fusca, M., Negrini, F., Perego, P., Magoni, L., Molteni, F. and Andreoni, G., Validation of a wearable IMU system for gait analysis: protocol and application to a new system, Applied Sciences, 8(7), 1167, 2018.
Google Scholar
10. Herman, T., Weiss, A., Brozgol, M., Giladi, N. and Hausdorff, J.M., Gait and balance in Parkinson's disease subtypes: objective measures and classification considerations, Journal of Neurology, 261(12), 2401-2410, 2014, doi: 10.1007/s00415-014-7513-6.
Google Scholar
11. Kleiner, A.F.R., Pacifici, I., Vagnini, A., Camerota, F., Celletti, C., Stocchi, F., Pandis, M.F.D. and Galli, M., Timed up and go evaluation with wearable devices: validation in Parkinson's disease, Journal of Bodywork & Movement Therapies, 22(2), 390-395, 2018, doi: 10.1016/j.jbmt.2017.07.006.
Google Scholar
12. Korean Agency for Technology and Standards, the 7th Korean Human Dimension Research Project, 2015.
13. Latt, M.D., Menz, H.B., Fung, V.S. and Lord, S.R., Acceleration patterns of the head and pelvis during gait in older people with Parkinson's disease: a comparison of fallers and nonfallers, Journal of Gerontology: Series A, 64(6), 700-706, 2009, doi: 10.1093/ gerona/glp009.
Crossref
Google Scholar
14. Lowry, K.A., Carrel, A.J., McIlrath, J.M. and Smiley-Oyen, A.L., Use of harmonic ratios to examine the effect of cueing strategies on gait stability in persons with Parkinson's disease, Archives of Physical Medicine and Rehabilitation, 91(4), 632-638, 2010, doi: 10.1016/j.apmr.2009.12.016.
Google Scholar
15. Lowry, K.A., Smiley-Oyen, A.L., Carrel, A.J. and Kerr, J.P., Walking stability using harmonic ratio in Parkinson's disease, Movement Disorders, 24(2), 261-267, 2009.
Crossref
Google Scholar
16. Mathie, M.J., Celler, B.G., Lovell, N.H. and Coster, A.C.F., Classification of basic daily movements using a triaxial accelerometer, Medical and Biological Engineering and Computing, 42(5), 679-687, 2004.
Google Scholar
17. Mirelman, A., Heman, T., Yasinovsky, K., Thaler, A., Gurevich, T., Marder, K., Bressman, S., Bar-Shira, A., Orr-Urtreger, A., Giladi, N. and Hausdorff, J.M., Fall risk and gait in Parkinson's disease: The role of the LRRK2 G2019S Mutation, Movement Disorder, 28(12), 1683-1690, 2013, doi: 10.1002/mds.25587.
Google Scholar
18. Mirelman, A., Weiss, A., Buchman, A.S., Bennett, D.A., Giladi, N. and Hausdorff, J.M., Association between performance on timed up and go subtasks and mild cognitive impairment: Further insights into the links between cognitive and motor function, Journal of the American Geriatrics Society, 62(4), 673-678, 2014, doi: 10.1111/jgs.12734.
Google Scholar
19. Na, E., Hwang, H. and Woo, Y., Study of acceleration of center of mass during sit-to-stand and stand-to-sit in patients with stroke, The Journal of Physical Therapy Science, 28(9), 2457-2460, 2016.
Google Scholar
20. Najafi, B., Armstrong, D.G. and Mohler, J., Novel wearable technology for assessing spontaneous daily physical activity and risk of falling in older adults with diabetes, Journal of Diabetes Science and Technology, 7(5), 1147-1160, 2013.
Google Scholar
21. Najafi, B., Horn, D., Marclay, S., Crews, R.T., Wu, S. and Wrobel, J.S., Assessing postural control and postural control strategy in diabetes patients using innovative and wearable technology, Journal of Diabetes Science and Technology, 4(4), 780-791, 2010.
Google Scholar
22. Ortega-Bastidas, P., Aqueveque, P., Gomez, B., Saavedra, F. and Cano-de-la-Cuerda, R., Use of a single wireless IMU for the segmentation and automatic analysis of activities performed in the 3-m timed up & go test, Sensors, 19(7), 2019, doi: 10.3390/ s19071647.
Google Scholar
23. Palmerini, L., Mellone, S., Avanzolini, G., Valzania, F. and Chiari, L., Quantification of motor impairment in Parkinson's disease using and instrumented timed up and go test, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 21(4), 664-673, 2013, doi: 10.1109/TNSRE.2012.2236577.
Google Scholar
24. Panebianco, G.P., Bisi, M.C., Stegni, R. and Fantozzi, S., Analysis of the performance of 17 algorithms from a systematic review: Influence of sensor position, analysed variable and computational approach in gait timing estimation from IMU measurements, Gait & Posture, 66, 76-82, 2018, doi:org/10.1016/j.gaitpost.2018.08.025.
Google Scholar
25. Podsiadlo, D. and Richardson, S., The timed "Up & Go": a test of basic functional mobility for frail elderly persons, Journal of the American Geriatrics Society, 39(2), 142-148, 1991.
Google Scholar
26. Ponti, M., Bet, P., Oliveira, C.L. and Castro, P.C., Better than counting seconds: identifying fallers among healthy elderly using fusion of accelerometer features and dual-task timed up and go, PLoS One, 12(4), 2017, doi: 10.1371/ journal.pone.0175559.
Google Scholar
27. Raymakers, J.A., Samson, M.M. and Verhaar, H.J.J., The assessment of body sway and the choice of the stability parameter(s), Gait and Posture, 21(1), 48-58, 2005.
Crossref
Google Scholar
PubMed
28. Sankarpandi, S.K., Baldwin, A.J., Ray, J. and Mazza, C., Reliability of inertial sensors in the assessment of patients with vestibular disorders: a feasibility study, BMC Ear Nose Throat Disorders, 17(1), 2017, doi: 10.1186/s12901-017-0034-z.
Google Scholar
29. Sant'Anna, A., Salarian, A. and Wickstrom, N., A new measure of movement symmetry in early Parkinson's disease patients using symbolic processing of inertial sensor data, IEEE Transactions on Biomedical Engineering, 58(7), 2127-2135, 2011, doi: 10.1109/ TBME.2011.2149521.
Google Scholar
30. Sejdic, E., Lawry, K.A., Bellanca, J., Redfern, M.S. and Brach, J.S., A comprehensive assessment of gait accelerometry signals in time, frequency and time-frequency domains, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 22(3), 603-612, 2014, doi: 10.1109/TNSRE.2013.2265887.
Google Scholar
31. Sekine, M., Akay, M., Tamura, T., Higashi, Y. and Fujimoto, T., Fractal dynamics of body motion in patients with Parkinson's disease, Journal of Neural Engineering, 1(1), 8-15, 2004.
Google Scholar
32. Simila, H., Immonen, M. and Ermes, M., Accelerometry-based assessment and detection of early signs of balance deficits, Computers in Biology and Medicine, 85(1), 25-32, 2017, doi: 10.1016/j.compbiomed.2017.04.009.
Google Scholar
33. Storm, F.A., Buckley, C.J. and Mazza, C., Gait event detection in laboratory and real life settings: accuracy of ankle and waist sensor based methods, Gait & Posture, 50, 42-46, 2016, doi: 10.1016/j.gaitpost.2016.08.012.
Google Scholar
34. Tmaura, T., Zakaria, N.A., Kuwae, Y., Sekine, M., Minato, K. and Yoshida, M., Quantitative analysis of the fall-risk assessment test with wearable inertia sensors, 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 7217-7220, 2013, doi: 10.1109/ EMBC.2013.6611223.
Google Scholar
35. Toosizadeh, N., Mohler, J., Lei, H., Parvaneh, S., Sherman, S. and Najafi, B., Motor performance assessment in Parkinson's disease: association between objective in-clinic, objective in-home and subjective/semi-objective measures, PLoS One, 10(4), 2015, doi: 10.1371/journal.pone.0124763.
Google Scholar
36. Trojaniello, D., Cereatti, A. and Croce, U.D., Accuracy, sensitivity and robustness of five different methods for the estimation of gait temporal parameters using a single inertial sensor mounted on the lower trunk, Gait & Posture, 40(4), 487-492, 2014, doi: 10.1016/ j.gaitpost.2014.07.007.
Google Scholar
37. Vervoort, D., Vuillerme, N., Kosse, N., Hortobagyi, T. and Lamoth, C.J.C., Multivariate analyses and classification of inertial sensor data to identify aging effects on the timed up and go test, PLoS One, 11(6), 2016, doi: 10.1371/journal.pone.0155984.
Google Scholar
38. Weiss, A., Herman, T., Giladi, N. and Hausdorff, J.M., New evidence for gait abnormalities among Parkinson's disease patients who suffer from freezing of gait: insights using a body-fixed sensor worn for 3 days, Journal of Neural Transmission, 122(3), 403-410, 2015, doi: 10.1007/s00702-014-1279-y.
Google Scholar
39. Yang, C., Hsu, Y., Shih, K. and Lu, J., Real-time gait cycle parameter recognition using a wearable accelerometry system, Sensors, 11(8), 7314-7326, 2011, doi: 10.3390/s110807314.
Google Scholar
40. Zakaria, N.A., Kuwae, Y., Tamura, T., Minato, K. and Kanaya, S., Quantitative analysis of fall risk using TUG test, Computer Methods Biomechanics and Biomedical Engineering, 18(4), 426-437, 2013, doi: 10.1080/10255842.2013.805211.
Google Scholar
41. Zampieri, C., Salarian, A., Carlson-Kuhta, P., Aminian, K., Nutt, J.G. and Horak, F.B., The instrumented timed up and go test: Potential outcome measure for disease modifying therapies in Parkinson's disease, Journal of Neurology, Neurosurgery, and Psychiatry, 81(2), 171-176, 2010, doi: 10.1136/jnnp.2009.173740.
Google Scholar
PIDS App ServiceClick here!