eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Mingon Ryoo
, Seung-Kweon Hong
10.5143/JESK.2020.39.6.617 Epub 2021 January 04
Abstract
Objective: The purpose of this study is to investigate drivers' lane change behavior and decision making in congested traffic situations.
Background: Many traffic accidents occur when changing lanes. Drivers feel the risk of accidents during the lane change. It is necessary to reduce the workload of the driver by supporting lane change, especially in heavy traffic situations. Drivers' lane change behavior and decision making should be investigated as a basic study for the design of lane change support systems.
Method: The lane change situations in a large city with heavy traffic were video-taped and analyzed. The data measured before the lane change is the speed of the vehicle changing lane and the speed of the rear vehicle on the target lane. At the start of the lane change, the distance between the rear vehicle on the target lane and the vehicle changing lane was measured. In the lane change process, the speed of the lane change vehicle, the lane change distance, and the speed of the rear vehicle on the target lane were measured.
Results: In a congested situation, the speed of lane change showed a positive relationship with the distance of lane change. Also, the distance between the rear vehicle on the target lane and the lane change vehicle did not affect the driver's speed decision. On the other hand, in a high risk of collision, the driver of the rear vehicle on the target lane performed defensive driving more actively than the driver of the lane change vehicle.
Conclusion: Under heavy traffic, the drivers of a lane change vehicle were speeding up during the long-distance lane change. For the safety reasons, they did not travel at high speeds over short distances. Drivers of lane-changing vehicles did not adjust the vehicle speed due to the lag gap, but adjusted the speed by the time to contact.
Application: The results of this research might help to develop driver support systems for the lane change.
Keywords
Lag gap Lane change speed Driver's speed decision Heavy traffic situations
자동차 주행 중에 운전자가 빈번히 수행하는 차선변경은 도로 교통안전과 교통흐름에 지대한 영향을 미치는 운전자 행위라고 할 수 있다(Sivak et al., 2007; Peng et al., 2015). 기존의 도로 교통안전 연구에 의하면 도로 상 충돌사고의 약 4~10%가 차선변경 상황에서 발생한 것으로 보고되었다(Petzoldt et al., 2014; Jin, 2013, Barr and Najm, 2001). 그리고 차량들이 차선변경을 많이 수행하는 교통구간에서는 교통흐름이 원활하지 못하고 빈번한 정체를 유발하게 된다(Cassidy and Bertini, 1999).
차선변경은 교통사고 유발 가능성이 높은 과업일 뿐만 아니라 운전자에게 정신적 부담을 주는 과업이라고 할 수 있다. 따라서 자율 주행 자동차를 지향한 자동화 연구의 중요한 주제가 될 수 있다. 그러나 차선변경과 관련된 자동화 연구는 다른 분야에 비해 부족한 상황이다. Khodayari et al. (2010)는 자동화 연구를 자동차 순행(car following), 차선유지(lane keeping) 그리고 차선변경(lane changing), 3가지 유형으로 분류하였으며, 3가지 유형 중에 차선변경에 관한 연구가 가장 부족하다고 평가하였다.
차선변경 과정에서의 운전자 행동에 대한 연구는 교통사고를 예방하고, 자율 주행 자동차의 개발을 위한 선행연구로써 수행되어 왔다. 기존 연구는 시뮬레이터를 활용한 연구와 실제 도로에서 수행한 연구들로 구분할 수 있고, 교통량이 많은 도심지역 상황과 고속도로 상황에서의 연구로 구분할 수 있다. 그러나 대부분의 연구는 시뮬레이터를 활용한 연구들이며 고속도로 상황에서의 연구들이었다(Yang et al., 2019; Nilsson et al., 2017). 본 연구에서는 도심지역의 교통량이 많은 실제 도로에서 운전자들의 차선변경 행동을 조사하고 분석하였다.
운전자가 차선변경을 시도할 때, 여러 가지 요인들을 고려하여 의사결정을 한다. Gipps (1986)는 "운전자들은 차선변경 의사결정 시에 차선변경의 필요성, 가능성, 욕구와 같은 요인들을 고려한다".고 하였다. 차선변경 가능성은 자차와 주변 차량의 속도 그리고 이들 차량들 간의 간격 등에 의해 결정된다. 또한 운전자들은 차선변경을 시행할 때, 차선변경 소요시간, 차선변경의 속도, 그리고 차선변경 거리에 대해서도 의사결정을 하고 행동으로 옮기게 된다. 그러나 교통량이 많은 상황에서 운전자의 의사결정이나 행동은 교통량이 적은 상황과는 다를 것이다.
기존연구에서는 운전자가 차선변경이 가능하다고 판단하는 목표 차선의 공간과 차선변경에 소요되는 시간이 교통의 혼잡도에 따라 차이가 있는지에 대한 실험연구들이 수행되었다. 여기서 운전자가 수용 가능한 목표 차선상의 공간(accepted gap)은 차선변경을 시도하는 시점에 차선변경 차량과 목표차선 후방차량의 간격과 차선변경 차량과 목표차선 전방차량의 간격의 합이다. Yang et al. (2019)의 연구는 상하이 도로에서 측정하였으며, 교통 혼잡 정도에 커짐에 따라 수용 가능한 목표차선 상의 공간(accepted gap)은 좁아졌으며, 차선변경 시간은 길어졌다. 그러나 Gurupackiam and Jones (2011)의 연구는 약간 다른 결과를 도출하였다. 미국의 알라바마의 도심에서 연구를 수행하였으며, 교통 혼잡 정도를 4단계로 구분하고 연구를 하였다. 결과는 수용 가능한 목표차선 상의 공간은 혼잡도가 높아질수록 통계적으로 유의하게 더 좁아졌다. 그러나 차선변경 시간은 혼잡 정도에 따라 유의하게 다르지 않았다.
본 연구에서는 교통량이 많은 도심에서 차선변경을 하는 상황을 조사하였다. 조사 분석한 내용은 첫째, 차선변경의 시간과 차선변경 속도의 관계를 분석하였다. 둘째, 차선변경을 시도하는 시점에서 목표차선 상의 후방차량과 차선변경 차량의 거리(lag gap)의 짧으면, 짧을수록 차선변경 차량은 더 가속하는지 그리고 후방차량은 더 감속하는 조사하였다. 셋째, 차선변경을 시도하기 전의 속도로 후방차량과 차선변경 차량이 이동을 한다면, 충돌이 예상되는 상황에서 후방차량과 차선변경 차량들이 차선변경 과정에서 어떻게 대응하는지를 분석하였다.
2.1 Data collection
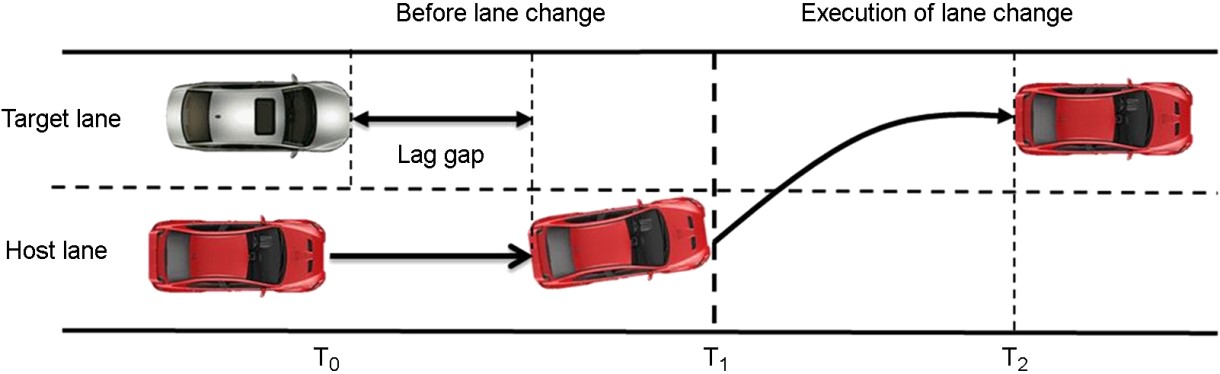
Figure 1과 같이 본 연구는 대전직할시의 도시의 한 곳에 차선변경 상황을 비디오로 촬영하고 분석하였다. 비디오 촬영 시간은 퇴근 시간대인 5시~6시 사이였으며 2020년 10월과 11월에 촬영하였다. 측정기간 동안 평균 차량의 속도는 6.79m/sec.(표준편차 2.81m/sec.)였으며, 도로 상황이 정확히 촬영될 수 있도록 고층 건물에 설치하고 촬영하였다.

2.2 Data analysis method
촬영된 차선변경 상황 중에서 목표차선 상에 후방차량이 존재하는 경우의 영상을 분석하였다. 분석한 차선변경 상황은 161건이었다. 분석을 위해 Figure 2와 같이 차선변경 이전 단계와 차선변경 수행 단계로 나누었다. 차선변경의 시작점은 주행차선에 있는 차량이 방향을 목표차선으로 향하여 회전하는 시점(T1)이다. "차선변경은 타이어의 바깥쪽 모서리가 차선의 안쪽 모서리에 접촉했을 때 차선변경이 시작된다". 라는 정의에 따라 차선변경 시작점을 설정하였다(Lee et al., 2004). 이 시점을 기준으로 이전 시간을 진입이전 단계이며 이후 단계는 차선변경 단계다. 차선변경 완료 시점은 목표차선에 진입한 차량이 목표차선과 평행하게 자세를 잡은 시점(T2)로 설정하였다.
차선변경 이전 단계에서의 차선변경 차량의 속도, 목표차선 상의 후방차량의 속도, 그리고 차선변경 시점에서 차선변경 차량과 후방차량의 거리(lag gap)을 측정하였다. 차선변경 시작점 이전 1초 동안의 이동거리를 측정함으로써 차선변경 차량의 속도와 후방차량의 속도를 계산하였다. 차선변경 단계에서는 차선변경 차량의 이동거리 즉 차선변경 시작점에서 차선변경 완료 시점까지의 거리를 측정하였으며, 이동에 걸리는 시간도 측정하였다. 이로부터 차선변경 시 변경차량의 속도를 계산하였다. 또한 이 시간 동안 후방차량의 이동거리와 이동시간 그리고 속도도 측정되었다. 카메라 영상에서의 각 차량의 이동시간을 측정할 수 있었으며, 이동거리는 영상에서 이동한 거리와 실도로에서 이동한 거리의 비례 관계를 이용하여 실 이동거리를 계산하였다.
3.1 Lane change distance and speed
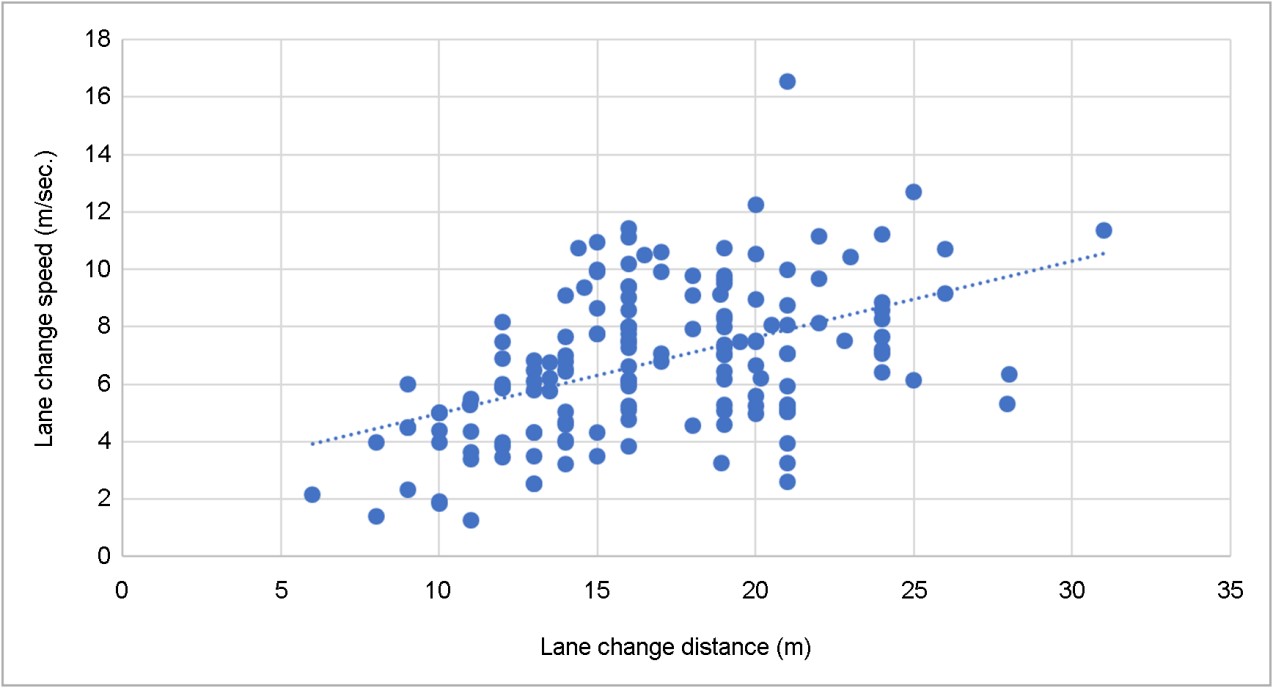
본 연구에서 조사된 차선변경 차량들의 차선변경 속도는 평균 6.80m/sec.였으며, 표준편차는 2.57m/sec.였다. 차선변경 시간은 평균 2.78sec. 표준편차는 1.19였다. 먼저 차선변경을 하는 동안 이동한 거리와 차선변경에 소요된 시간의 관계에 대해 선형회귀 분석을 실시하였다. 분석결과는 식(1)과 같으며, 낮은 결정계수 값이 도출되었지만, 선형회귀식의 기울기는 0.52었다. 이는 이동시간에 상관없이 이동거리는 거의 일정하다는 것을 의미한다. 따라서 통계적으로 더 유의한 결과를 도출하기 위하여 차선변경 속도와 차선변경 시간의 관계를 식(2)와 같이 분석하였다. Figure 3와 같이 차선변경 속도와 차선변경 시간의 관계는 거의 비례하는 것으로 나타났다. 이러한 결과는 짧은 거리를 신속하게 이동하면서 차선변경을 할 것이라는 기대와는 다른 결과였다.
차선변경 시 이동거리 = 15.37 + 0.52 × 이동시간, = 0.018 (1)
차선변경 시 이동속도 = 2.35 + 0.27 × 이동거리, = 0.224 (2)
3.2 Lag gap and speed change of vehicles
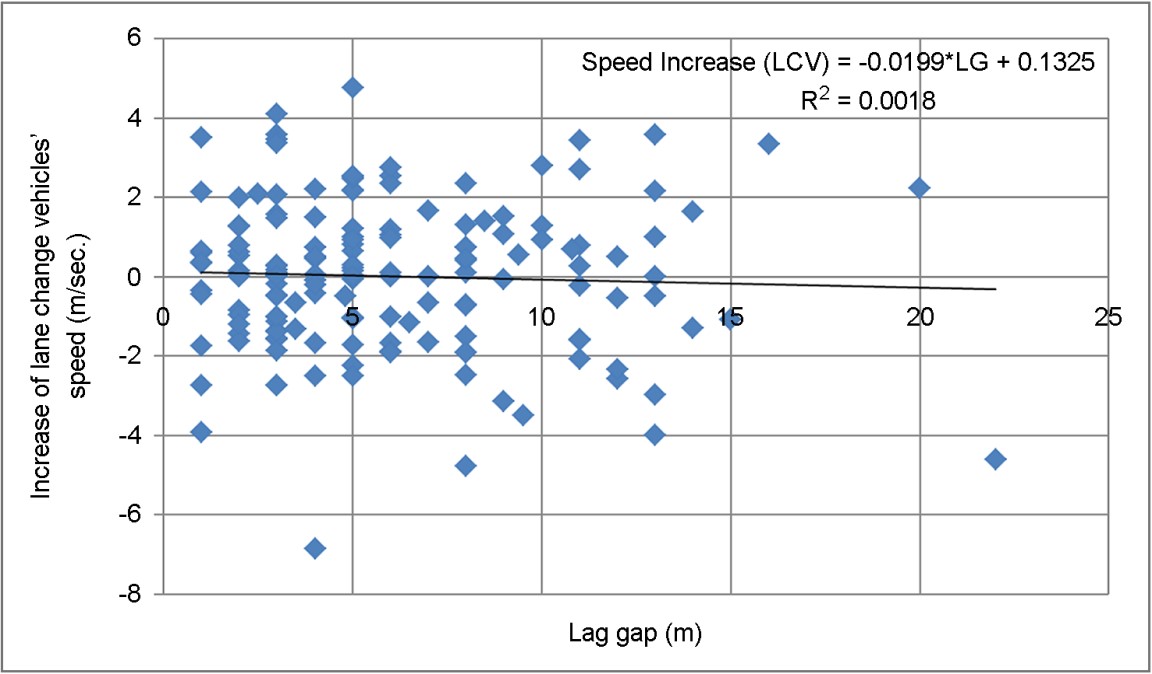
먼저 분석 대상 차량들이 차선변경을 시도하는 시점에서 후방차량과 차선변경 차량 사이의 거리(lag gap)를 조사하였다. 차간거리는 평균은 5.78m였으며, 표준편차는 3.59m였다. 다음으로 차간거리에 따라 차선변경 차량과 후방차량의 행동이 달라지는지 분석하였다. 차선변경 시작 시점에서 후방차량과의 차선변경 차량과의 거리(lag gap)는 좁으면, 차선변경을 시도하는 차량은 차선변경 과정에서 차선변경 이전 속도보다 더 속도를 높이면서 차선변경을 할 것으로 예상하였다. 또한 이러한 상황에서 후방차량은 진입하는 차량을 인식하여 속도를 줄일 것으로 예상하였다. 그러나 예상과는 달리 차간거리에 따라 후방차량이나 차선변경 차량은 속도를 변화시키지 않았다.
Figure 4에서 Y축은 차선변경 동안의 차량속도에서 차선변경 전의 차량속도를 뺀 값이다. 회귀분석의 결과에 의하면 차간거리에 좁을수록 후방차량이 감속하거나 차선변경 차량이 가속하는 경향을 보이지 않았다. 수식 (3)과 수식(4)에 나타난 바와 같이 오히려 후방차량은 약간 가속을 하였고, 차선변경 차량은 약간 감속을 하였다.
목표차선의 후방차량의 속도증가 = -1.08 + 0.10 × 차간거리, = 0.045 (3)
차선변경 차량의 속도증가 = 0.13 - 0.02 × 차간거리, = 0.002 (4)
3.3 Driver's decision making in the risk of collision
3.2절의 분석결과에 의하면 운전자가 차선변경을 할 때, 목표차선의 후방차량과의 차선변경 차량 간의 거리는 운전자들의 속도결정에 유의한 영향을 주지 못했다. 그러나 차선변경 과정에서 후방차량과의 충돌위험을 느낀다면 차선변경 차량의 운전자는 안전을 위해 가속을 하면서 차선변경을 할 것이고 목표차선의 후방차량 운전자는 감속을 하면서 대응할 것으로 예상하였다. 본 연구에서 관측한 차선변경 상황에는 다수의 충돌위험이 있었다. 후방차량과 차선변경 차량이 차선변경 이전의 속도로 그대로 유지한다면 충돌할 수 있는 상황들이다. 차선변경 시작 시점에 후방차량과 차선변경 차량의 차간거리와 후방차량과 차선변경 차량의 상대속도를 고려하여 충돌예상시간(TTC: Time to Contact)을 계산하였다. 충돌예상시간이 도출된 상황은 161개의 차량변경 상황 중에서 77개 상황이었다.
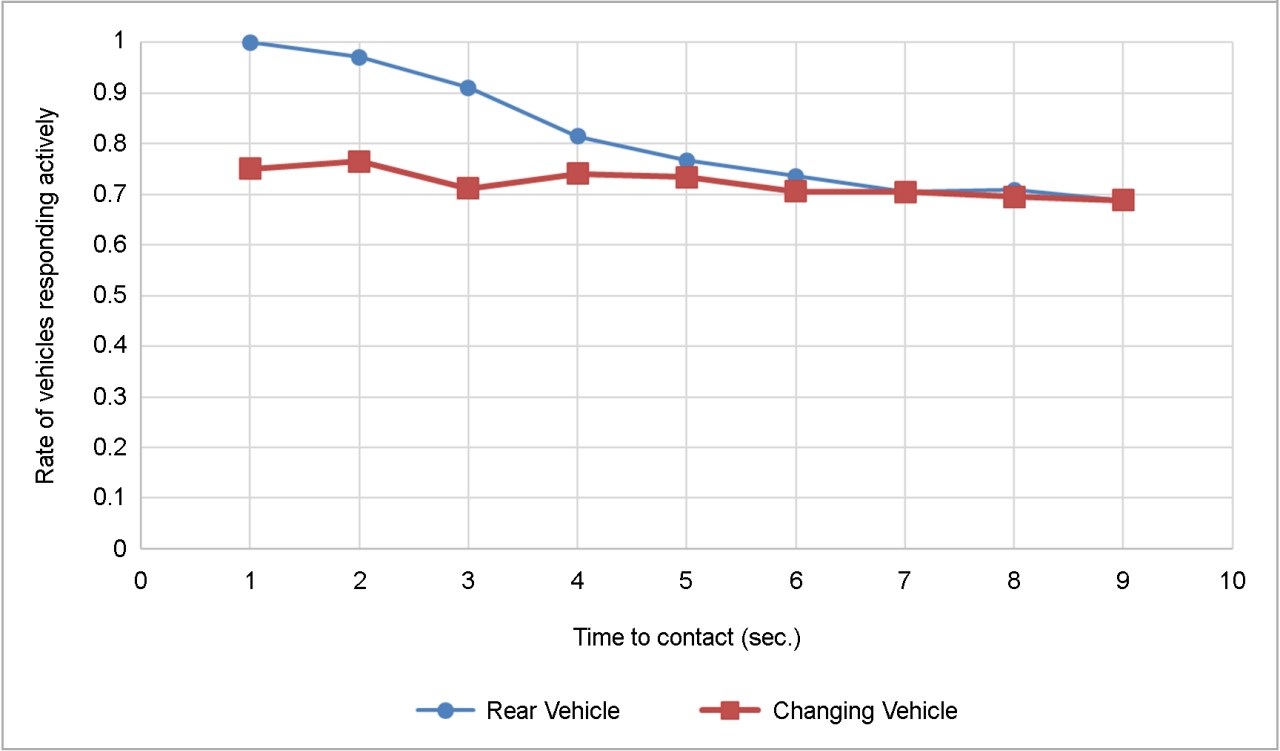
Figure 5는 TTC의 변화에 따라 후방차량과 차선변경 차량의 반응을 나타내는 그림이다. 예를 들어, TTC가 4초인 경우에 차선변경 차량의 74%는 TTC 4초 이하인 총 차선변경 상황 건수 중에서 차선변경 차량이 속도를 증가시키는 상황 건수의 비율이다. 동일한 방법으로 TTC 4초에서 후방차량 값 81%는 TTC 4초 이하인 총 차선변경 상황 건수 중에서 후방차량이 감속시키는 상황 건수의 비율이다. Figure 5에 나타난 바와 같이 충돌위험이 더 높은 상황일수록 차선변경 차량의 운전자보다 후방차량의 운전자가 안전을 위해 더 적극적으로 반응하고 있음을 알 수 있다.
본 연구에서는 교통량이 많은 도로 상에서의 차선변경 상황을 분석하였다. 차선변경을 하는 운전자들은 차선변경의 거리가 길수록 더 빠른 속도로 차선변경을 하였다. 이러한 비례 관계는 고속도로 상황에서 나타나는 현상일 것이다. 그러나 교통량이 많은 경우에는 이러한 현상이 나타났다. 안전을 위해 짧은 거리를 이동하면서 빠른 속도로 차선변경을 할 것이라는 예상과는 상반된 결과였다. 후속연구에서 본 연구보다 더 교통량이 많은 경우를 조사한다면 본 연구의 결과와는 다른 결과가 도출될 수도 있을 것이다.
본 연구에서 도출한 결과의 다른 하나는 목표차선의 후방차량과 차선변경 차량 사이의 거리가 운전자의 속도결정에 영향을 주지 않는다는 것이다. 그러나 충돌예상시간은 운전자의 속도결정에 결정적인 영향을 주었다. 이러한 결과는 운전자들이 단지 후방차량과의 간격에 의존하여 차량속도를 결정하지 않고, 후방차량과의 간격뿐만 아니라 후방차량과의 상대적 속도까지 동시에 고려하면서 차량속도를 결정한다는 것을 의미한다.
충돌예상시간의 변화에 따른 후방차량과 차선변경 차량의 속도변화에 대한 분석결과는 위험하고 시급한 상황일수록 후방차량의 운전자가 차선변경 차량의 운전자 보다 더 적극적으로 위험 상황에 대응한다는 것을 의미한다. 이러한 결과는 혼잡하고, 충돌위험이 있는 상황에서 차선변경 차량 운전자의 대응만으로는 안전한 차선변경을 보장할 수 없다는 것을 시사한다. 자율 주행 자동차의 개발과정에서 염두에 두어야 할 연구결과라고 생각한다.
본 연구에서는 목표차선의 후방차량과 차선변경 차량의 관계를 위주로 분석하였다. 그러나 향후 연구에서 목표차선의 전방차량이나 주행차선의 전방차량을 동시에 분석한다면 보다 정밀한 분석결과를 도출할 수 있을 것이다.
References
1. Barr, L. and Najm, W.G., Crash problem characteristics for the intelligent vehicle initiative, TRB 80th Annual Meeting (Paper No. 01-2471), Washington, DC., 2001.
Google Scholar
2. Cassidy, M.J. and Bertini, R.L., Some traffic features at freeway bottlenecks. Transportation Research Part B: Methodological, 33(1), 25-42, 1999.
Google Scholar
3. Gipps, P.G., A Model for the Structure of Lane-Changing Decisions. Transportation Research B, 20(5), 403-414, 1986.
Google Scholar
4. Gurupackiam, S. and Jones, S.L., Empirical Study of Lane Changing in Urban Streets under Varying Traffic Conditions, Procedia Social and Behavioral Sciences, 16, 259-269, 2011.
Google Scholar
5. Jin, W.L., A multi-commodity Lighthill-Whitham-Richards model of lane-changing traffic flow. Transportation Research Part B Methodological, 57, 361-377, 2013.
Google Scholar
6. Khodayari, A., Ghaffari, A., Ameli, S. and Flahatgar, J., A historical review on lateral and longitudinal control of autonomous vehicle motions, 2010 International Conference on Mechanical and Electrical Technology, Singapore, 2010, 421-429, 2010.
Google Scholar
7. Lee, S.E., Olsen, E.C.B. and Wierwille, W.W., A Comprehensive Examination of Naturalistic Lane Changes. (Final Report. DOT HS 809 702). Washington, DC: National Highway Traffic Safety Administration, 2004.
Google Scholar
8. Nilsson, P., Laine, L. and Jacobson, B., A simulator study comparing characteristics of manual and automated driving during lane changes of long combination vehicles. IEEE Transactions on Intelligent Transportation Systems, 18(9), 2514-2524, 2017.
Google Scholar
9. Peng, J., Guo, Y., Fu, R., Yuan, W. and Wang, C., Multi-parameter prediction of drivers' lane-changing behaviour with neural network model, Applied Ergonomics, 50, 207-217, 2015.
Google Scholar
10. Petzoldt, T., Brüggemann, S. and Krems, J.F., Learning effects in the lane change task (LCT) - Realistic secondary tasks and transfer of learning, Applied Ergonomics, 45(3), 639-646, 2014.
Google Scholar
11. Sivak, M., Schoettle, B., Reed, M.P. and Flannagan, M.J., Body-pillar vision obstructions and lane-change crashes, Journal of Safety Research, 38, 557-561, 2007.
Google Scholar
12. Yang, M., Wang, X. and Quddus, M., Examining lane change gap acceptance, duration and impact using naturalistic driving data. Transportation Research Part C, 104, 317-331, 2019.
Google Scholar
PIDS App ServiceClick here!