eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Seung Jae Lim
, Rohae Myung
10.5143/JESK.2021.40.6.413 Epub 2022 January 02
Abstract
Objective: The aim of this study is to show that by calculating the optimal take-over request lead time (TORlt) using the stabilization time, the stabilization time could be fully utilized in research on take-over and reflect the personal driving tendency that variables in the previous study could not perform.
Background: In conditional automated driving, the driver is placed in an out-of-the-loop situation. In order to overcome this problem, it is necessary to take-over request, but there is no official definition of optimal TORlt. In previous studies, they suggested various optimal TORlts, but there is the common limitation that they did not reflect personal driving tendencies. The tendency of personal driving is well observed in longitudinal/lateral control during manual driving, and it is necessary to analyze the stabilization after take-over to see if the driving performance has reached the manual driving level.
Method: A total of 46 subjects participated in the study. This study described a take-over situation due to the sudden appearance of obstacles during automated driving using an OpenDS simulator. After the take-over, the driver performed manual driving until it was determined that the vehicle had stabilized on its own. The driving performance related to vehicle stabilization was measured as the standard deviation of speed and steering wheel angle (SWA). Using these, individual stabilization standards and the stabilization time were measured. Four TORlts (3s, 7s, 10s, 15s) were used as independent variables, and one-factor within-subject ANOVA analysis and Fisher's LSD post-hoc analysis were performed using longitudinal/lateral stabilization time and Dual stabilization time as dependent variables.
Results: In lateral stabilization and dual stabilization, there was a significant difference in stabilization time according to the change in TORlts, which was classified into two groups: 3s and more than 7s. And the stabilization time decreased as TORlt increased from 3s to 10s. But when TORlt increased from 10s to 15s, the stabilization time increased again, which was in a U-shape.
Conclusion: The optimal TORlt calculated using the stabilization time reflecting individual stabilization standards is about 10 seconds, which is similar to previous studies.
Application: This means that the stabilization time can sufficiently replace the role of variables used in the previous take-over studies. In addition, since individual stabilization standards were applied and analyzed, there is a sufficient advantage in that it can reflect personal driving tendencies.
Keywords
Stabilization Automation Take-over Request lead time (TORlt) Personal driving tendency
최근 자율주행과 관련된 연구들이 많이 진행되고 있고 실제로 자율주행차량들이 도로에 등장하기 시작했다. 사람들은 자율주행차량을 "스스로 움직이고, 사람의 입력 없이 환경을 감지하고 운행할 수 있고, 사람의 개입 없이 주행을 결정하고, 전통적인 자동차 운송 능력을 충족시킬 수 있는 잠재력을 가지고 있는 것"이라고 생각한다(Wan and Wu, 2018). 미국 도로교통안전국은 Society of Automotive Engineers (2018)의 국제적 정의를 자율주행에 대한 운전자의 참여 정도에 따라서 총 5개 단계로 구분하고 있다. 0단계는 자율주행이 전혀 없는 수동운전이라고 한다면 3단계는 인간의 개입이 일부 필요한 조건부 자율주행, 5단계는 사람의 개입이 전혀 필요 없는 완전한 자율주행을 의미한다.
자율주행 시스템은 운전자에게 새로운 환경을 제공한다. Carsten et al. (2012)에서는 운전자가 자동운전 시스템의 작동으로 인해 지속적인 운전 모니터링이 필요하지 않게 되면 운전과 관련 없는 업무인 운전 외 과제(Non-Driving Related Task, NDRT)를 하게 됨을 확인했고 Endsley and Kaber (1999)에서는 기존의 수동 운전자들과 비교했을 때 이러한 행동이 자율주행 운전자들에게 새로운 상황을 제공함을 확인했다. 새로운 상황이란 자율주행차량의 운전자가 운전 외 과제를 하다가 다시 운전 과제로 주의를 전환할 때 과의존성, 기술 저하, 상황 인식 저하 등을 초래할 수 있는 Out-of-the-loop 문제가 발생하는 것이다(Saffarian et al., 2012). 이러한 문제점은 실제 사고로 이어지고 있다. 일부 사람들이 자율주행차량에 대한 오류를 인식하지 못하고 추돌사고가 일어나기 직전까지 어떠한 조치도 취하지 않다거나 게임을 하다가 콘크리트 바리케이드에 충돌하여 사망하는 사고 등 많은 사고들이 발생하였다(Park, 2021).
이러한 자율주행차량에서 안전과 관련된 문제를 해결하기 위해 설치한 장치는 '제어권 전환 요청(Take-Over Request, TOR)'이다. 제어권 전환(Take-over)이란 차량의 횡방향 및 종방향 제어, 다른 도로 사용자 및 환경에 대한 모니터링, 차량 디스플레이 및 자동 시스템과의 상호작용 등의 책임이 자율주행차량에서 인간으로 전환됨을 의미한다(Banks and Stanton, 2016a). Banks and Stanton (2019)에서 제어권 전환은 자동화 수준이 높아진다고 하더라도 인간 요소가 완전히 필요 없어지는 상황은 존재하지 않고, 완전한 자율주행 기능을 제공 못하는 상황, 운전자가 다시 차량을 수동으로 제어하려고 하는 상황 등으로 인해 제어권 전환이 필요하고 중요하다고 이야기하였다.
그렇기 때문에 많은 자율주행 연구들이 제어권 전환을 중심으로 이루어지는데 특히 제어권 전환 요청이 언제, 얼마나 빨리 이루어지느냐가 관건이었다. 그러나 제어권 전환 요청은 빨리 인지할수록 좋은데 언제 제어권 전환을 요청해야 하는 것이 가장 적절한지, 그 시간(Take-over Request lead time, TORlt)에 대한 공식적인 정의는 아직까지 없고(Wan and Wu, 2018) 최적의 제어권 전환 요청 시간을 구하는 것에 대한 연구가 많이 진행되고 있다. Gold et al. (2013)에서는 제어권 전환 요청 시간을 5초와 7초를 비교하였고 이때 사용한 변수는 이동 경로와 가속 페달 밟은 정도, 반응 시간을 비교하였다. 그 결과 제어권 전환 요청 시간이 7초일 때 제어권 전환 품질이 더 우수함을 확인하였다. 또한 Mok et al. (2015)은 제어권 전환 요청 시간 2, 5, 8초를 비교하였는데 사용한 변수는 핸들조작 각도, 자율주행 시스템에 대한 신뢰도, 차량의 위치를 이용하였고 2~5초 사이에 제어권 전환에 필요한 최소 시간이 있으며 8초일 때 가장 편안한 제어권 전환이 가능하다고 이야기하였다. 또 다른 연구에서는 Samuel et al. (2016)이 자율주행차량 앞에 갑작스러운 보행자가 등장하는 상황에서 운전자의 눈동자 움직임을 분석하였고 그 결과 긴급한 상황에서 최소 8초의 제어권 전환 요청 시간이 있어야 한다고 제안했다. 이렇듯 많은 연구들을 종합해 보면 Eriksson and Stanton (2017)에서는 Gold et al. (2013)에서 주장한 운전자가 제어권 전환하는데 필요한 최소 시간 7초가 최근 연구에서 많이 활용되고 있음을 확인하였고 이는 많은 연구에서 7초를 최적의 시간으로 생각하고 있음을 의미한다.
이러한 이전 연구들이 공통적으로 가지고 있는 한계점은 개인 운전 성향을 반영하지 않았다는 데에 있다. Bao et al. (2019)는 운전 보조장치가 일차적인 안전에만 초점을 맞추고 있어 운전자와는 무관하게 상황을 조치하도록 프로그래밍되어 있다고 하면서 안전성이 가장 중요하고 최우선적인 관심사이지만 사용자에게 개인화된 운전 경험을 제공할 수 있어야 한다고 주장하였다. 또한 Dogan et al. (2019)에서는 종/횡방향 제어는 수동 주행에 대한 습관이 관찰되고 제어권 전환 후 안정화에 대한 운전자 역할의 중요성을 강조하였다. 이러한 연구들은 자율주행차량 연구에서 특히, 종/횡적인 제어에 있어서는 개인 별 운전 습관을 반영하는 것이 필요함을 의미한다.
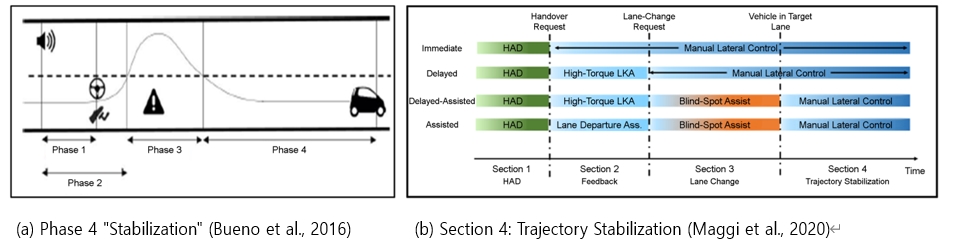
개인의 운전 성향을 반영하기에 가장 용이한 변수는 차량 안정화이다. Dogan et al. (2019)은 종/횡방향 제어에서 수동 주행에 대한 습관이 관찰됨을 확인하였다. 그리고 Park et al. (2019)에서는 제어권 전환 직후 운전자의 상태가 평소의 운전 상태와 다를 확률이 크기에 평소 운전 상태와 동일한 상태에 이르기 까지에 대한 고려가 필요하고 이를 위해 제어권 전환 안정화 특성 분석이 필요하다고 하였다. 이러한 이전 연구들을 토대로 개인의 운전 습관이 반영되는 종/횡방향 제어를 수동 주행(평소의 운전 상태)으로 측정한 것을 차량 안정화 기준으로 삼고 제어권 전환 이후 차량이 해당 기준으로 안정화될 때까지를 본다면 개인 운전 성향이 반영된 분석이 가능할 것이다. 차량 안정화와 관련된 이전 연구로는 Bueno et al. (2016)에서 Phase 4를 안정화 구간으로 설정하고(Figure 1-a) 5초씩 나누어 총 12개의 시간 구간을 각각의 최대 핸들 조작 각도와 평균 속도로 비교하였고, 통계적으로 유의한 차이가 없게 되는 구간을 '안정화되었다'고 판단하였다. 또한 Maggi et al. (2020)에서는 Section 4를 Trajectory Stabilization로 하고(Figure 1-b) 구간 전체에서 도로 중심으로부터 차량 위치를 표준편차로 계산하고 제어권 전환 전략 별로 비교하여 위치 변화가 적은 전략을 더 우수한 것으로 평가하였다. 아쉽게도 차량 안정화와 관련된 이전 연구에서도 개인 운전 성향이 반영된 바는 없었다.
본 논문에서는 차량 안정화 도달시간을 통해 최적의 제어권 전환 요청 시간을 도출할 수 있을 것이다라는 가설을 설정하고 실험에 임하였다. 이를 통해 차량 안정화 도달시간이 기존 연구에서 사용했던 각종 변수들처럼 자율주행차량의 안전에서 가장 핵심적인 요소인 최적의 제어권 전환 요청 시간을 산출하는 데에 충분히 활용할 수 있고 개별 운전 성향을 반영하지 못한다는 기존 변수들의 단점을 극복할 수 있는 변수임을 확인하고자 한다.
2.1 Participants
20세부터 33세까지 총 46명의 참가자(남 33, 여 13)가 실험에 참가했다. 운전 경력은 6개월 이내부터 5년 이상까지 분포하였다. 이들 모두는 정상 시력, 유효한 운전면허증을 가지고 있었다. 참가자들에게는 시간당 1만원의 실험참가비가 주어졌다.
2.2 Apparatus
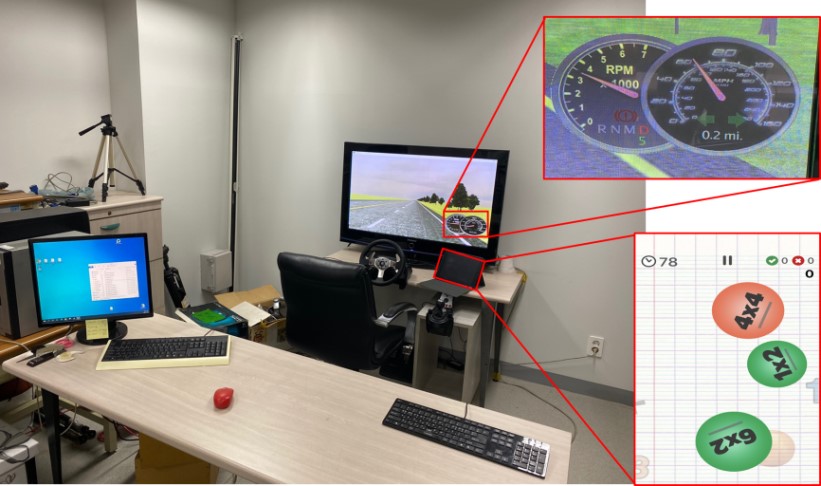
Figure 2에서 보는 바와 같이 자율주행 시스템을 구현하기 위해 OpenDS 주행 시뮬레이터를 이용하였다. 주행 시뮬레이터의 구성은 로지텍 GT 핸들, 의자, 엑셀 및 브레이크 페달, 상하좌우 조절 가능한 의자로 이루어졌다. LCD 모니터 1대에서는 주행 시나리오가 표시되었다. LCD 모니터에서 운전자가 확인할 수 있는 차량 정보는 게이지로 표시되는 속도이다. 자율주행 시스템이 작동하는 동안 운전자가 수행해야 할 운전 외 과제는 핸들 우측에 위치한 태블릿PC를 이용하여 수행하였다. 자율주행 시스템은 특정 사건이 발생함과 동시에 운전자에게 청각적인 도구를 이용하여 제어권 전환을 요청한다. 자율주행 시스템은 운전자가 엑셀 또는 브레이크 페달이나 핸들을 건드림과 동시에 해제된다. 운전자는 자율주행 시스템을 다시 시작할 수 있는 권한은 가지고 있지 않다.
2.3 Driving scenario
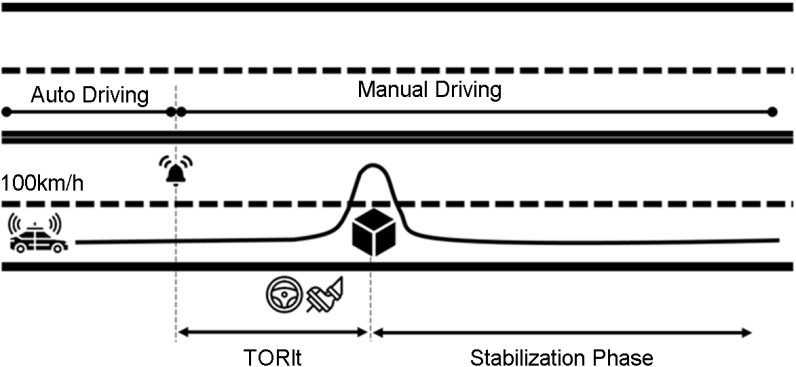
운전자는 4차선 고속도로 환경에서 가장 우측 차선을 100km/h로 달리고 있다. 주변에 다른 차량은 존재하지 않고 나무와 속도 경고판이 존재한다. 자율주행 시스템은 운전자의 추가적인 조작 없이 실험 시작과 동시에 작동한다. Figure 3에서 보는 바와 같이 제어권 전환 상황은 운전자 차선 앞에 갑작스러운 장애물이 등장하는 것으로 부여되었다. 이때 운전자는 속도를 줄이거나 차선을 왼쪽으로 변경하여 충돌을 피할 수 있다. 장애물을 피한 이후 운전자는 원래 차선으로 돌아온 뒤 계속 수동운전을 수행한다. 운전자가 스스로 차량이 안정화되었다고 판단하면 실험은 종료된다.
2.4 Non Driving Related Task (NDRT)
운전 외 과제는 운전자의 모든 주의 자원을 운전 과제에서 제외시키기 위해 시각적인 요소와 인지적 요소 모두 사용하는 과제를 채택하였다. 운전자는 자율주행이 진행되는 동안 핸들 우측에 설치되어있는 태블릿PC를 이용하여 숫자 계산 게임을 진행한다. 주어진 화면에는 계산식 또는 숫자가 적힌 총 3~4개의 원들이 제공되고 이를 계산하고 비교하여 가장 작은 숫자부터 큰 숫자가 적힌 원 순으로 터치를 한다. 만약 틀리게 되면 새로운 화면으로 전환된다. 운전자들은 해당 게임이 진행되는 동안 자율주행차량 주변 환경에 대한 모니터링은 실시하지 않고 가능한 높은 점수가 나올 수 있도록 정확한 시행을 한다. 또한, 자율주행 시스템으로부터 제어권 전환 요청이 발생되면 즉시 운전 외 작업을 멈추고 운전 과제로 전환해야 한다.
2.5 Experiment design and procedures
현재 실험은 제어권 전환 요청 시간(TORlt)을 독립변수로 사용하였다. 제어권 전환 요청 시간은 총 4가지(3초, 7초, 10초, 15초)를 이용하였고 이는 개인 별 무작위 순서로 부여되었다. 운전자는 실험 개요, 목적, 방법에 대한 설명을 들은 이후 개인정보 활용 동의서 및 개인 인적사항을 작성하였다. 이후 시뮬레이터에 앉아 자신의 신체 특성에 맞게 조절한 뒤 시뮬레이터를 이용하여 1회의 자율주행 및 제어권 전환 요청 신호를 경험한 후 수동운전을 5분간 연습했다.
본 실험에 앞서 개인 별 차량 안정화의 기준을 측정하기 위해 수동운전을 시행하는데 이때 제어권 전환 요청 신호를 중간에 부여하여 본 실험과 동일한 환경을 조성하였다. 본 실험이 시작되면 차량은 시작과 동시에 자율주행으로 움직이고 운전자는 제어권 전환 요청 시간에 대한 정보 없이 태블릿PC를 이용하여 운전 외 과제를 시작한다. 운전자는 운전 외 과제를 수행하는 동안 자율주행차량과 주변 환경에 대한 모니터링은 불필요하고 온전히 운전 외 과제에만 집중하고 차량은 입력된 시나리오대로 일정한 속도와 좌우편차 없는 안정적인 주행이 이루어진다. 차량이 장애물에 도달하기까지 걸리는 시간이 제어권 전환 요청 시간이 되면 LCD 모니터에서 경고음이 주어지고 운전자는 경고음을 듣는 즉시 운전 외 과제는 중지한 뒤 자율주행차량으로부터 제어권을 전환 받아 수동으로 운전을 진행한다. 장애물 통과 이후 운전자 스스로 차량이 안정화되었다고 생각되면 실험자에게 통보하고 실험을 종료한다.
2.6 Measurements
OpenDS 주행 시뮬레이터는 경과시간, 속도, 차량의 위치(x, y, z), 핸들 조작 각도, 엑셀과 브레이크 밟은 정도를 자동으로 수집했다. 본 논문에서 사용한 종속변수는 운전시간, 속도(Speed), 핸들 조작 각도(Steering Wheel Angel, SWA)이다. 운전시간의 단위는 ms, 속도의 단위는 km/h, 핸들 조작 각도는 전체 회전 각도(-540°~540°)를 -1~1범위로 산출한 값으로 출력된다. 각 데이터는 0.05초마다 측정되고 각 측정값은 제어권 전환 요청이 발생한 시점부터 실험이 종료될 때까지 기록된다.
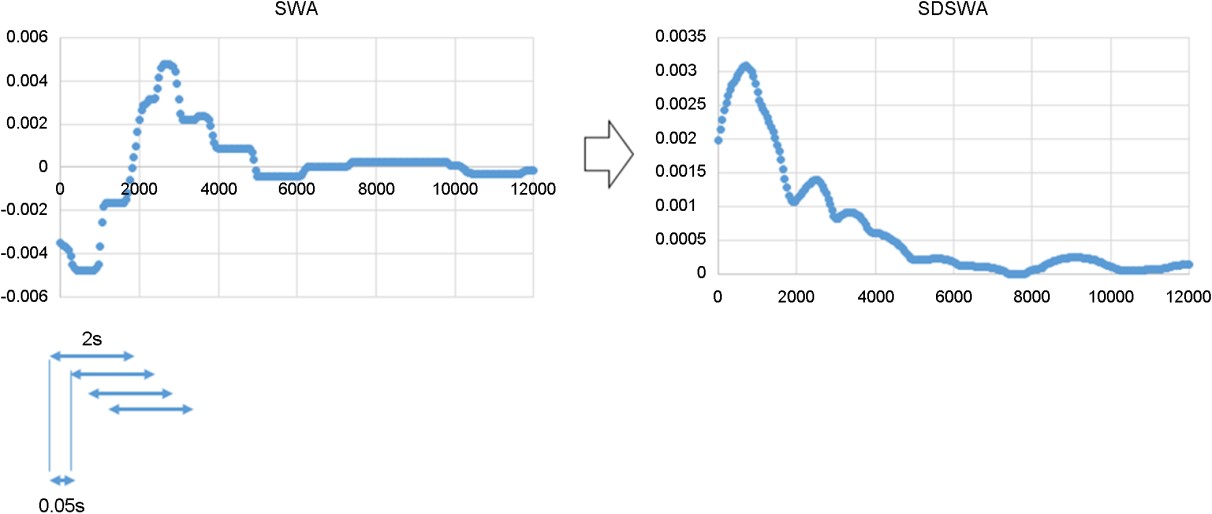
각 실험 별 측정 데이터는 장애물을 통과한 지점부터 시작하여 n초에서 n+2초까지의 속도와 핸들 조작 각도의 표준편차를 계산하여데이터 측정 최소 단위인 0.05초마다의 표준편차값으로 정리하였다(Figure 4). 표준편차는 평균으로부터 얼마나 퍼져있는지를 나타내 는 척도로 표준편차가 작다면 그만큼 변화량도 적고 이는 앞으로의 2초 동안 안정적으로 운전했다고 볼 수 있다. 이를 통해 차량의 안정화 정도를 산출하였고 수동운전 데이터에서 측정된 안정화 기준 이내로 처음 도달한 시간을 기록하였다. 종/횡적인 안정화가 동시에 기준 이내에 도달했을 경우는 동시 안정화 시간(Dual Stabilization Time)이라고 명명하였다.
2.7 Data analysis
수집된 데이터는 SAS 프로그램을 이용하여 4가지 제어권 전환 요청 시간을 독립변수로 하고 각 차량 안정화 도달시간을 종속변수로 하는 one-factor within-subject ANOVA를 실행하여 제어권 전환 요청 시간에 따른 차량 안정화 도달시간에 차이가 존재하는지 확인하고자 하였다. 이후 유의한 차이를 보이는 변수에 대해 Fisher의 LSD 사후분석을 실시하였다. 이를 통해 제어권 전환 요청 시간의 증감에 따른 안정화 시간이 어떻게 변하는지를 확인함으로써 가장 빨리 안정화에 도달하는 제어권 전환 요청 시간을 확인하고자 한다.
실험 결과 총 참가자 46명 중 시스템 오류로 인한 측정 불량 4명, 장애물과 충돌하여 차량이 정지된 인원 6명은 제외하고 36명을 분석하였다. 장애물 충돌 상황은 제어권 전환 요청 시간이 3초일 때에만 발생하였다.
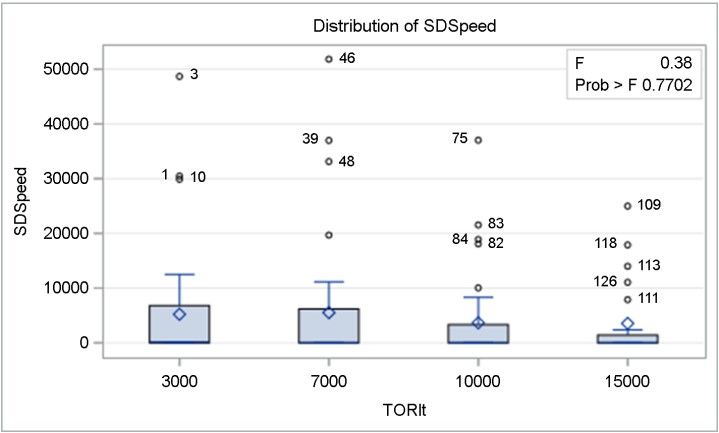
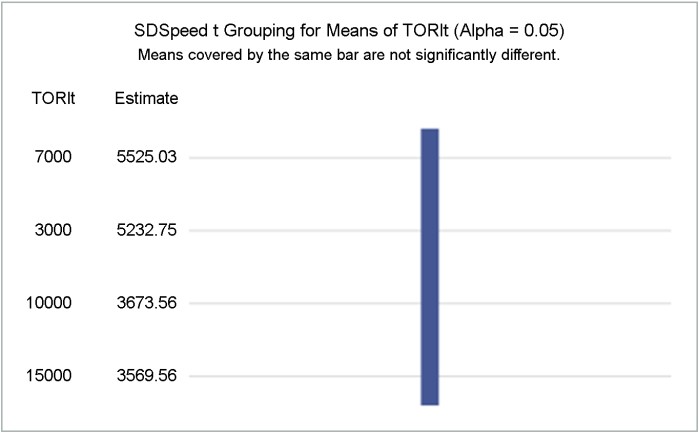
3.1 Standard Deviation of Speed (SDSpeed)
속도의 표준편차는 자율주행차량의 종적인 안정화를 판단하는 기준이다. Figure 5를 보면 제어권 전환 요청 시간이 증가함에 따른 속도 표준편차의 안정화 도달시간의 변화에서 특이점을 찾을 수 없었다. 제어권 전환 요청 시간이 3초일 경우에는 5.2초, 7초일 경우에는 5.5초, 10초 일 경우에는 3.7초, 15초일 경우에는 3.6초의 안정화 도달시간을 보인다. Figure 6에서 통계적으로 봤을 때도 속도 표준편차에 대한 제어권 전환 요청 시간의 영향은 유의하지 않다(F(3,140))=0.38, p=0.7702).
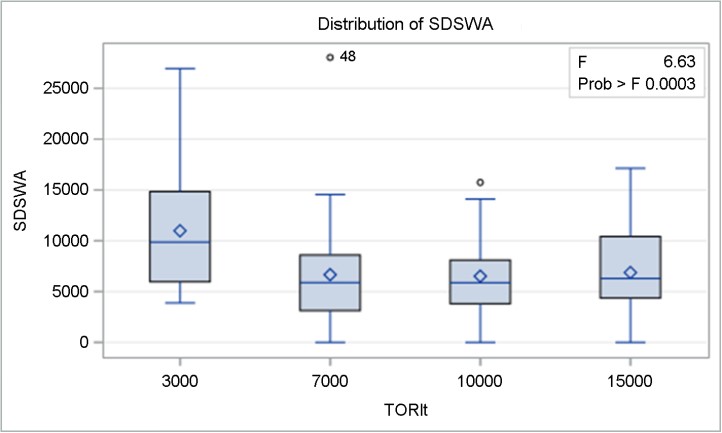
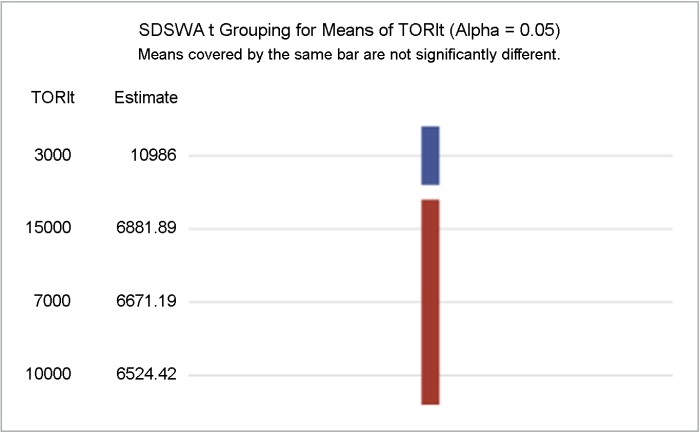
3.2 Standard Deviation of Steering Wheel Angle (SDSWA)
핸들 조작 각도의 표준편차는 자율주행차량의 횡방향 안정화를 의미한다. Figure 7을 보면 제어권 전환 요청 시간이 증가함에 따라 핸들 조작 각도 표준편차의 안정화 도달시간은 점차 짧아지다가 다시 증가하는 모습을 보이고 있다. 제어권 전환 요청 시간이 3초일 경우에는 11초, 7초일 때는 6.7초, 10초일 때는 6.5초, 15초일 때는 6.9초의 안정화 도달시간을 보인다. 통계적으로는 속도 표준편차 때와는 다르게 Figure 8에서 보듯 핸들 조작 각도 표준편차에 대한 제어권 전환 요청 시간 별 차이는 유의하다(F(3,140))=6.63, p=0.0003). 그 차이는 제어권 전환 요청 시간 3초와 7초 이상 두 그룹으로 구분된다. 제어권 전환 요청 시간이 3초일 때와는 별개로 7초 이상의 제어권 전환 요청 시간에서는 차이가 존재하지 않는다.
3.3 Dual stabilization time
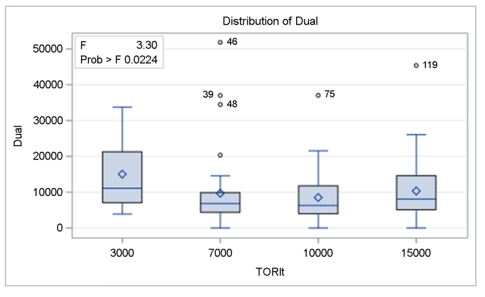
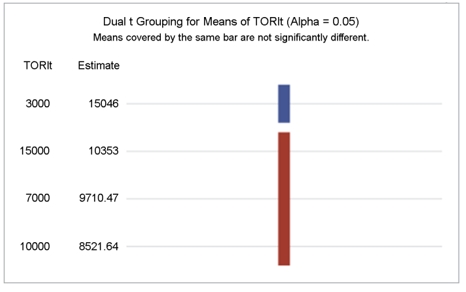
동시 안정화 시간은 속도 표준편차와 핸들 조작 각도 표준편차에서의 안정화 기준을 모두 충족시키는 시간을 의미한다. Figure 9를 보면 핸들 조작 각도 표준편차 때와 마찬가지로 제어권 전환 요청 시간이 증가함에 따라 동시 안정화 시간은 점차 짧아지다가 다시 증가하는 모습을 보이고 있다. 제어권 전환 요청 시간이 3초일 경우에는 15초, 7초일 경우에는 9.7초, 10초일 경우에는 8.5초, 15초일 경우에는 10.4초의 안정화 도달시간을 보인다. Figure 10에서 보듯 통계적으로 봤을 때 동시 안정화 시간에 대한 제어권 전환 요청 시간의 차이는 유의했다(F(3,140))=3.30, p=0.0224). 핸들 조작 각도 표준편차 때의 상황과 마찬가지로 제어권 전환 요청 시간 3초와 7초 이상 두 그룹으로 구분되고 7초 이상의 제어권 전환 요청 시간에서는 차이가 존재하지 않는다.
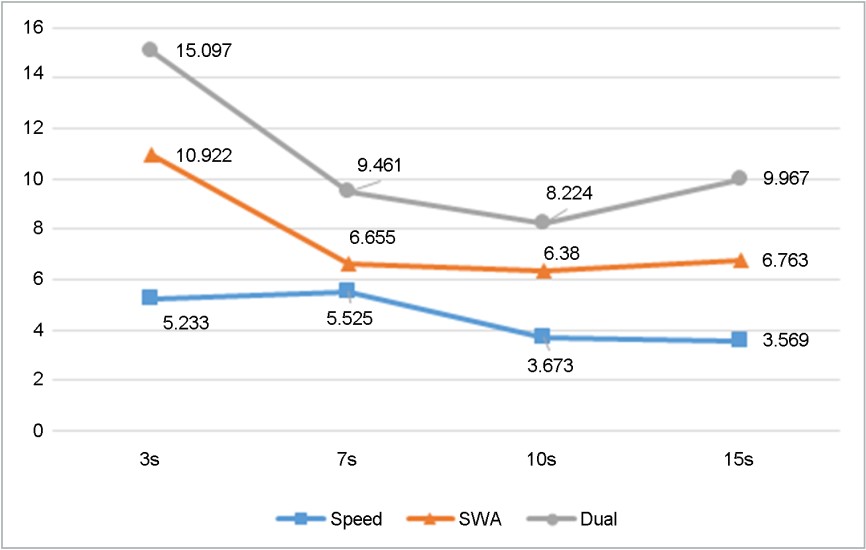
실험 결과들을 종합하면 제어권 전환 요청 시간이 3초에서 10초로 증가하는 동안 횡적인 안정화 도달시간과 동시 안정화 도달시간은 점차 감소하다가 제어권 전환 요청 시간이 15초로 커지면 안정화 도달시간은 다시 증가하는 U자 모양을 띠었다. 그리고 제어권 전환 요청 시간이 10초일 때 가장 짧은 안정화 도달시간을 보였다. 종적인 안정화 도달시간은 제어권 전환 요청 시간의 변화에 따른 특이사항은 확인되지 않았다(Figure 11).
본 논문에서는 차량 안정화 도달시간을 이용하여 최적의 제어권 전환 요청 시간을 도출하면 기존 연구와 유사한 결과가 나올 것이라는 가설을 검정하였다. 이를 통해 차량 안정화 도달시간이 기존 연구에서 사용하는 변수들과 마찬가지로 최적의 제어권 전환 요청 시간 도출에 활용할 수 있으며 추가적으로 개인 별 운전 성향을 반영할 수 있다는 장점을 얻을 수 있다는 것을 보이고자 하였다.
실험 결과 차량 안정화 도달시간을 이용한 최적의 제어권 전환 요청 시간은 10초로 도출되었다. 이는 이전 연구들에서 5~8초 정도의 제어권 전환 요청 시간이 적절하다라는 결과와 크게 다르지 않았다. 또한 국토교통부에서 비상시 제어권 전환 요청 시간을 10초로 규정한 것에 힘을 실어주었다(Department of Advanced Automobile Technology, 2020). 실험 결과가 기존 연구에서 크게 벗어나지 않았다는 의미는 차량 안정화 도달시간이 기존에 사용했던 반응 시간, 앞 차량과의 거리 등과 같은 변수들을 대체할 수 있다는 의미이다. 그러면서 개인 별 차량 안정화 기준에 의한 분석을 진행하였으므로 운전 과제 수행간 발현되는 개인의 특성이 최적의 제어권 전환 요청 시간 도출에 반영되었다는 장점을 얻을 수 있었다. 이는 기존 연구의 한계점을 극복하였다고 볼 수 있다. 자율주행기술 연구에서 개인의 운전 성향을 반영한다는 것은 최근 많이 등장하는 '초개인화'라는 용어에서 그 의미를 찾을 수 있다. Subramanyan (2014)에 따르면 초개인화는 빅데이터와 인공지능을 이용해 더욱 개인화된 대상 제품, 서비스 및 콘텐츠를 제공하기 위해 데이터를 사용하는 것을 의미한다고 하였다. 현대 기술이 추구하는 빅데이터 기반 초개인화를 자율주행기술에 접목시킨다면 개인의 입장에서는 운전 경력이 쌓임에 따라 차량 안정화 기준이 조정되는 기능이 생길 것이고 조직의 입장에서는 군경이나 관공서, 버스회사 등과 같이 공용 차량을 사용할 때 운전자가 변함에 따라 제어권 전환 요청 시간을 조정시키는 기술로 발전할 수 있다고 생각한다.
제어권 전환 요청 시간 15초 이후에 차량 안정화 도달시간이 다시 증가한 것은 Brandenburg and Skottke (2014)에서 자율주행 종료 시 운전자는 자율주행에 적응하여 운전하다가 다시 기존에 자신이 인식하는 운전 기술로 재조정한다는 연구 결과와 유사하다고 할 수 있다. 제어권 전환 직후 운전자는 자율주행이 수행하고 있는 현 상태를 유지하려고 노력하다가 일정 시간이 지난 뒤 자신의 기존 습관대로 운전하게 되는데 이러한 전환 과정에서 안정화 수준이 흔들릴 수 있다고 생각한다.
실험 결과에서 종방향(속도) 차량 안정화는 횡방향 차량 안정화와는 달리 제어권 전환 요청 시간 변화에 따른 유의한 차이가 존재하지 않았다. 이는 Park et al. (2019)에서 속도는 브레이크 및 가속 페달과 서로 직접적인 영향이 있어 차량 안정화를 분석하는 변수로서 적절하지 못하다고 주장한 것을 뒷받침할 수 있다. 그렇기에 속도라는 단 하나의 변수만 이용해서는 최적의 제어권 전환 요청 시간을 도출하는데 어려움이 있었다. 반면 횡방향 차량 안정화는 핸들 이외에 다른 요소들의 영향이 적기 때문에 핸들 조작 각도만 이용하여도 최적의 제어권 전환 요청 시간을 도출할 수 있었다. 그리고 동시 차량 안정화는 Table 1에서 알 수 있듯이 종방향 안정화와는 매우 강한 양의 상관관계를(r=0.83221, p<0.0001), 횡방향 안정화와 강한 양의 상관관계(r=0.5435, p<0.0001)를 보이고 있다. 그러면서도 횡방향 차량 안정화와 동일한 결과를 산출해 낼 수 있다. 이는 종방향 안정화를 이용하고자 할 때는 종방향 안정화 개별적인 분석보다는 동시 안정화를 이용하는 것이 더 좋은 방법이라는 것을 의미하고 다만 종방향 안정화와 횡방향 안정화 사이에 약한 양의 상관관계를 보이고 있다는 점을 주의해야 할 것이다.
|
Pearson Correlation Coefficient, N=144 (r, p-value) |
|||
|
SDSpeed |
SDSWA |
Dual |
|
|
SDSpeed |
- |
0.21283, 0.0104 |
0.83221, <0.0001 |
|
SDSWA |
0.21283, 0.0104 |
- |
0.54350, <0.0001 |
|
Dual |
0.83221, <0.0001 |
0.54350, <0.0001 |
- |
본 연구의 한계점은 실험 참가자 나이가 20~33세로 참가자 구성이 다소 제한적이다. Clark and Feng (2017)연구에서 조건부 자율주행 시 제어권 전환 상황에서 고령 운전자들은 젊은 운전자들과 비교했을 때, 브레이크와 가속 페달을 더 세게 조작하였음을 확인하였다. 또한, Wiedemann et al. (2018)은 알코올 수준이 높을수록 제어권 전환 시간과 횡방향 조작에 부정적인 영향을 미친다는 것을 확인하였다. 이처럼 운전자 개인의 특성은 다양할 뿐만 아니라 같은 운전자일지라도 처한 상황이 다양할 수 있기 때문에 본 논문에서 제시한 최적의 제어권 전환 요청 시간 10초는 운전자의 모든 나이, 직면 가능한 모든 상황에 동일하게 적용될 수 없다. 다만 차량 안정화 도달 시간을 이용한다면 다양한 운전자 특성 및 상황에 따른 각각의 최적의 제어권 전환 요청 시간을 도출할 수 있을 것이라 생각한다.
향후 연구는 차량 안정화 도달시간을 이용하여 기존에 제시된 여러 가지 제어권 전환 모델을 검증해 보아야 할 것이다. McDonald et al. (2019)에서 제어권 전환의 안전성 개선을 위한 두 가지 과제 중 하나가 제어권 전환 프로세스에서 운전자의 행동 예측을 위한 모델을 식별해야 하는 것이라고 주장하면서 제어권 전환 이후 행동에 대한 검증이 부족하다고 이야기하고 있다. 차량 안정화 도달시간은 대표적인 제어권 전환 이후 행동이라고 할 수 있기 때문에 McDonald et al. (2019)에서 요구하는 검증을 충분히 이행해 나갈 수 있을 것이라 생각한다.
본 논문에서는 차량 안정화 도달시간을 이용하여 최적의 제어권 전환 요청 시간 도출이 가능함을 보았고 차량 안정화 도달시간을 이용할 때의 장점을 확인하였다. 기존 연구에서 제안한 최적의 제어권 전환 요청 시간과 차량 안정화 도달시간을 이용한 최적의 제어권 전환 요청 시간을 비교하였고 방법론적으로는 기존 연구에서 활용하지 않은 개인 운전 성향이 반영했다는 차이점을 두었다. 그 결과는 중요한 결론을 뒷받침하였다. 첫째 차량 안정화 도달시간은 기존 연구에서 사용해왔던 변수들과 마찬가지로 제어권 전환 요청 시간 연구에서 충분히 활용될 수 있다. 둘째 차량 안정화 도달시간은 최적의 제어권 전환 요청 시간을 도출할 때 개인별 차량 안정화 기준을 이용함으로써 기존 연구에서 하지 못한 개인 운전 성향을 제어권 전환 요청 시간 분석에 활용하였다. 이러한 결과는 차량 안정화 도달시간이 자율주행 시스템이 초개인화 영역으로 확대되는 데에 중요한 역할을 할 것이라 생각한다.
References
1. Banks, V.A. and Stanton, N.A., Driver-centred vehicle automation: Using network analysis for agent-based modelling of the driver in highly automated driving systems, Ergonomics, 59, 1442-1452, 2016.
Google Scholar
2. Banks, V.A. and Stanton, N.A., Analysis of driver roles: Modelling the changing role of the driver in automated driving systems using EAST, Theoretical Issues in Ergonomics Science, 20(3), 284-300, 2019.
Google Scholar
3. Bao, N., Yang, D., Carballo, A., Özgüner, Ü. and Takeda, K., Personalized safety-focused control by minimizing subjective risk. In 2019 IEEE Intelligent Transportation Systems Conference (ITSC), 3853-3858, IEEE, 2019.
Google Scholar
4. Brandenburg, S. and Skottke, E., Switching from manual to automated driving and reverse: Are drivers behaving more risky after highly automated driving?, 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), 2978-2983, 2014.
Google Scholar
5. Bueno, M., Dogan, E., Selem, F.H., Monacelli, E., Boverie, S. and Guillaume, A., How different mental workload levels affect the take-over control after automated driving. In 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), 2040-2045. IEEE, 2016.
Google Scholar
6. Carsten, O., Lai, F.C.H., Barnard, Y., Jamson, A.H. and Merat, N., Control task substitution in semiautomated driving: Does it matter what aspects are automated?, Human Factors, 54, 747-761, 2012.
Google Scholar
7. Clark, H. and Feng, J., Age differences in the takeover of vehicle control and engagement in non-driving-related activities in simulated driving with conditional automation. Accident Analysis & Prevention, 106, 468-479, 2017.
Google Scholar
8. Department of Advanced Automobile Technology, The world's first partially autonomous vehicle (level 3) safety standards are established. Korea Ministry of Land, Infrastructure and Transport, http://www.molit.go.kr/USR/NEWS/m_71/dtl.jsp?lcmspage= 2&id=95083365 (retrived January 5, 2020).
9. Dogan, E., Honnêt, V., Masfrand, S. and Guillaume, A., Effects of non-driving-related tasks on takeover performance in different takeover situations in conditionally automated driving. Transportation Research Part F: Traffic Psychology and Behaviour, 62, 494-504, 2019.
Google Scholar
10. Endsley, M. and Kaber, D., Level of automation effects on performance, situation awareness and workload in a dynamic control task, Ergonomics, 42(3), 462-492, 1999.
Google Scholar
11. Eriksson, A. and Stanton, N.A., Takeover Time in Highly Automated Vehicles: Noncritical Transitions to and From Manual Control, Human Factors, 59(4), 689-705, 2017.
Google Scholar
12. Gold, C., Damböck, D., Lorenz, L. and Bengler, K., "Take over!" How long does it take to get the driver back into the loop?. In Proceedings of the human Factors and Ergonomics Society Annual Meeting (Vol. 57, No. 1), 1938-1942, Sage CA: Los Angeles, CA: Sage Publications, 2013.
Google Scholar
13. Maggi, D., Romano, R. and Carsten, O., Transitions Between Highly Automated and Longitudinally Assisted Driving: The Role of the Initiator in the Fight for Authority, Human Factors, 2020.
Google Scholar
14. McDonald, A.D., Alambeigi, H., Engström, J., Markkula, G., Vogelpohl, T., Dunne, J. and Yuma, N., Toward computational simulations of behavior during automated driving takeovers: a review of the empirical and modeling literatures. Human Factors, 61(4), 642-688, 2019.
15. Mok, B., Johns, M., Lee, K.J., Miller, D., Sirkin, D., Ive, P. and Ju, W., Emergency, automation off: Unstructured transition timing for distracted drivers of automated vehicles. In 2015 IEEE 18th International Conference on Intelligent Transportation Systems, 2458-2464, IEEE, 2015.
Google Scholar
16. Park, H.S., [Special report] ③Self-driving car. What kind of accident did it have?, AI Times, http://www.aitimes.com/news/ articleView.html?idxno=138745 (retrived May 31, 2021).
17. Park, S., Jeong, H., Kwon, C., Kim, J. and Yun, I., Analysis of Take-over Time and Stabilization of Autonomous Vehicle Using a Driving Simulator. The Journal of The Korea Institute of Intelligent Transport Systems, 18(4), 31-43, 2019.
Google Scholar
18. Saffarian, M., De Winter, J.C. and Happee, R., Automated driving: human-factors issues and design solutions, In Proceedings of the human Factors and Ergonomics Society Annual Meeting, 56(1), 2296-2300, 2012.
Google Scholar
19. Samuel, S., Borowsky, A., Zilberstein, S. and Fisher, D.L., Minimum time to situation awareness in scenarios involving transfer of control from an automated driving suite., Transportation Research Record, 2602(1), 115-120, 2016.
Google Scholar
20. Society of Automotive Engineers, Taxonomy and definitions for terms related to driving automation system for on-road motor vehicles (No. J3016-2018), SAE International, 2018.
21. Subramanyan, V., What's The Hype Around 'Hyper-Personalization'?, www.business2community.com/marketing/whats-hype-around-hyper-personalization-01045882 (retrived 23 January 2018).
22. Wan, J. and Wu, C., The effects of lead time of take-over request and nondriving tasks on taking-over control of automated vehicles. IEEE Transactions on Human-Machine Systems, 48(6), 582-591, 2018.
Google Scholar
23. Wiedemann, K., Naujoks, F., Wörle, J., Kenntner-Mabiala, R., Kaussner, Y. and Neukum, A., Effect of different alcohol levels on take-over performance in conditionally automated driving. Accident Analysis & Prevention, 115, 89-97, 2018.
Google Scholar
PIDS App ServiceClick here!