eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Hwi Woo Lee
, Eun Young Chung
, Kwan Yong Park
, Young Jae Im
, Eui Seung Jung
10.5143/JESK.2021.40.6.443 Epub 2022 January 02
Abstract
Objective: The goal of this research is to study the driver's acceptable level of vibration intensity and duration as haptic feedback during conditional automated driving.
Background: Gradually, the driving of a vehicle is being automated, which frees the driver from driving. As various activities become possible as non-driving related activities (NDRAs) in the vehicle, driver's attention level gets lowered and accordingly, visual, auditory, and tactile-based feedback must be properly provided. Unlike visual and auditory information, which can interfere with driver's concentration and confuse situational awareness due to information from many systems, tactile feedback is presented as an important feedback method in a way that can improve the efficiency of information delivery about safety. However, although there are various situations in which the driver is informed of the change of control right in the NDRT (Non-Driving Related Task) situation, there is still a lack of research about the intensity and duration as haptic feedback.
Method: By establishing an experimental environment similar to that of a vehicle, the vibration actuators were placed on the seat in a 2 × 2 arrangement on the seat pan and seat back. The vibration was implemented using Arduino equipment and PWM control. The experiment was conducted by combining the independent variables, the intensity of vibration (1~5V), and the level of stimulation time(1.5s, 2.5s, 3.5s, 4.5s). Dependent variables, Error rate and Preference were selected, and Preference for the seat vibration stimulus position (1. Seat back & pan, 2. Seat back, 3. Seat pan) was investigated. Preferences were all collected on a 7-point likert scale.
Results: Through ANOVA analysis, there were significant differences in the intensity of vibration, stimulation time, and the interaction between the two variables, and there was no significant difference in gender or age. Subjects were able to identify vibrations from 3V, and in the case of stimulation time of 3.5s was the most preferred at 3V and 4V, which recognize most vibrations, and 1.5s and 4.5s had lower preferences. At 5V, 2.5s was the most preferred, and from 3.5s the preference decreased sharply. In the case of the vibration stimulation position of the seat, the seat back had the highest preference, and in the case of the seat pan, the preference was very lower than that of the seat back and seat back & pan.
Conclusion: In this study, the minimum level for recognizing the vibration stimulation of the haptic feedback in the vehicle seat and the optimal stimulation time according to the vibration intensity was investigated through experiments, and the range that could accommodate the haptic feedback was derived.
Application: Based on the results of the vibration stimulation level and stimulation time level for the haptic feedback of the vehicle seat in this study, it can be used as a reference index when designing the haptic feedback of the vehicle in the future.
Keywords
Haptic feedback in the vehicle seat Vibrator locations of the vehicle seat Vibration recognition
자동차 산업은 다양한 첨단 편의 장치들이 도입되면서 운전 작업 수행이 점차 자동화되고 있으며, 자동화 기술이 탑재된 자동차는 미래 자동차 산업에서 중요한 역할을 할 것이다. 다가오는 미래의 완전 자율주행 자동차 개발을 위하여 활발히 연구 및 개발되고 있다. 현재까지 조건부 자율주행(SAE, Level 3)이 가능한 자동차가 상용화되면서(Dogan et al., 2019), Level 3가 가능한 차량부터 운전자는 부분적으로 차량을 제어해야 하는 의무에서 벗어나 NDRT (Non-Driving Related Task)를 수행할 수 있으며, 이를 통해 운전자의 상황인식이 저하될 수 있고, 이는 자동화 수준이 높을수록 증가하는 경향을 보인다(Endsley, 1995; De Winter et al., 2014).
그러나 자율주행의 기술은 아직 불완전하기 때문에 자율주행 기능은 여전히 날씨, 도로 유형 등 다양한 운전 조건에 크게 영향을 받는다(Wan and Wu, 2018). 또한 차량 내 정보 시스템(In-Vehicle Information System, IVIS)의 개발로 인해 운전자와 시스템 간 상호작용이 복잡해지면서, 기존의 시각 및 청각 기반 상호작용은 운전자가 시각 및 청각 채널에 집중해야 하는 상황에서 운전 성능 저하 및 운전자의 집중을 방해하는 등의 문제를 유발할 수 있다(Tijerina et al., 2000; Van Erp and Van Veen, 2004; Gu and Jin, 2009). 결과적으로 차량에서 Haptic interfaces의 사용은 중요한 대안으로 제시되었으며, Haptic interfaces는 일반적으로 사용자에게 촉각 및 운동 감각 신호를 제공하여 사용자는 신체 주변의 모든 가능한 피부에 의해 Haptic 자극을 인지할 수 있다(Chang et al., 2011). 차량을 운전하는 동안 시트는 운전자의 신체 중 가장 큰 면적을 차지하는 interfaces이다. 따라서, Haptic interfaces은 차량 내 운전자의 안전에 대한 정보 전달의 효율성을 향상시킬 수 있다(Tan et al., 2003; Lee et al., 2004; Riener, 2008).
조건부 자동화 또는 Level 3에서 인간 운전자는 시스템에서 TOR (Take-Over Request)가 요구되거나 상황이 운영 설계 영역을 초과하는 경우 시스템 장애와 같은 비상 상황에서 제어를 재개할 준비가 되어 있어야 하는 상황에서 관련 선행 연구(Dogan et al., 2019; Morales-Alvarez et al., 2020)에 따르면 여러 운전자는 상황에 즉각적인 개입이 필요하지 않아 보이는 경우 TOR을 인식하여도 NDRT를 계속 수행했다고 보고되었으며, Morrell and Wasilewski, (2010)에서도 안전해 보이는 상황에서 시스템(Haptic feedback)이 작동될 때 운전자는 경고에 대해 놀라거나, 해당 상황이 무시된다고 하였다. 현재까지 특히 자율주행 차량에서 촉각 경고의 진동 패턴이 운전자 행동에 미치는 영향에 대한 연구는 부족한 실정이다(Telpaz et al., 2015).
본 연구에서는 차량 내 시트의 진동 자극(Haptic feedback)을 통해 운전자가 진동 자극을 인지할 수 있는 최소한의 수준 및 진동 세기에 따른 최적의 자극 시간을 조사하여 수용 가능한 Haptic feedback 범위를 도출하기 위한 연구를 목적으로 한다.
2.1 Participants
차량 시트의 Haptic feedback 실험에 참여하는 피실험자는 운전 경험이 있고, 신체의 체성 감각에 문제없는 총 30명(남: 15, 여: 15)을 대상으로 구성하였다. 피실험자 집단의 평균 연령은 남자 28.7(표준편차=2.61)세, 여자 29.1(표준편차=2.67)세이다. 피실험자는 실험 전 진동 촉각 인식에 이상이 없는지 검증 과정을 통해 확인하였으며, 연구 참여에 대한 동의를 얻은 후 진행하였다.
2.2 Apparatus
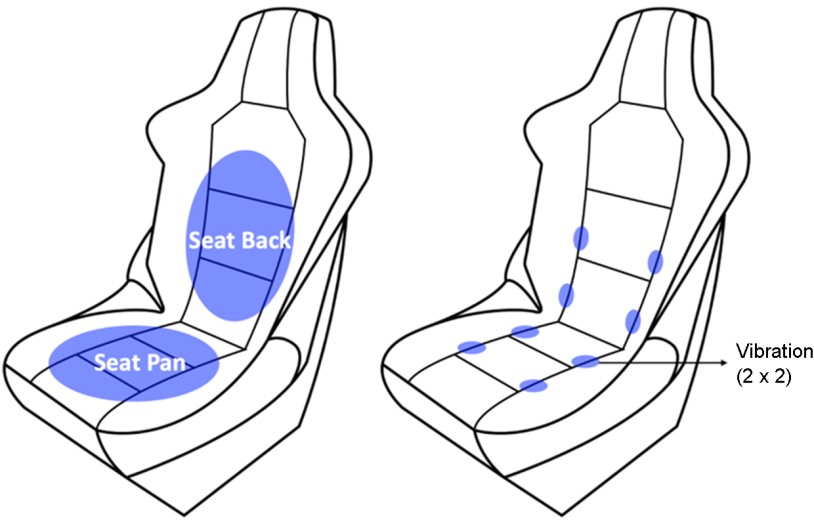
본 실험은 차량 시트의 Haptic feedback 제공을 위해 (Figure 1)과 같은 환경에서 진동 모터 배치는 선행 연구(Chang et al., 2011; Ji et al., 2011; Wan and Wu, 2018) 내용을 참고하여 차량과 유사한 시트에서 Seat back과 Seat pan에 각 4개의 진동 모터를 2 × 2로 배치하였다(Figure 2). 진동 촉각을 제공하기 위해 DC 12V, 6600 ±10% RPM 사양의 Eccentric motor를 사용하였으며, Eccentric motor는 빠른 반응과 구조적 단순성을 가지고 있어 전자 제품과 같은 상용 제품에서 촉각적 자극을 제공하는 데 사용된다. 진동 모듈은 Arduino를 활용하였으며, C++ 언어 기반의 프로그래밍(Arduino IDE)을 통해 진동의 전압과 자극 시간을 제어하였다.

2.3 Characteristics & control of vibration
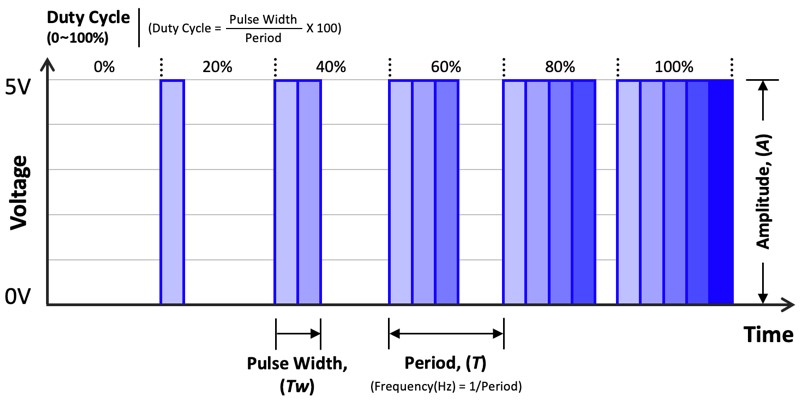
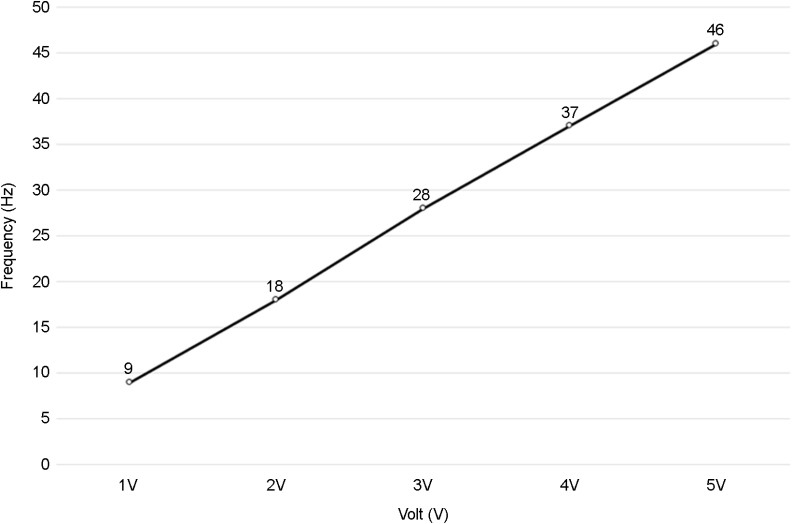
진동 구현은 PWM (Pulse Width Modulation) 제어에 통해 입력된 전압에 따른 Eccentric motor에서 진동이 발생되는 방식이다. 진동은 특정 진동 주파수가 주어지면 진동 진폭이 증가함에 따라 주파수에 대한 민감도가 증가한다(Morley and Rowe, 1990). 관련 연구(Ji et al., 2011)에 따르면 전압(V) 입력과 진동 출력의 주파수(Hz) 사이의 선형 관계와 전압(V) 입력과 진동의 진폭(G) 사이의 곡선 관계를 추정할 수 있으며, 모터의 전압 입력에 따라 주파수와 진폭이 동시에 증가함을 보여주었다. 본 실험은 앞서 언급한 선행 연구조사 내용을 바탕으로 전압(Volt)을 통해 진동 세기를 제어하였으며, 방식은 다음과 같다. 진동 모터 제어는 PWM 제어 방식을 통해 Pulse의 Width를 조절하여 1~5V까지의 전압을 제어했을 때(Figure 3), 진동 모터의 입력 전압(V)에 따른 주파수(Hz)는 (Figure 4)와 같이 나타났다.
2.4 Experimental design
본 실험은 진동의 세기(전압) 수준과 자극 시간 수준에 따라 진동을 인식하는 범위, 선호도가 높은 수준을 파악하고자 한다. 독립변수로는 전압 수준(1V (9Hz), 2V (18Hz), 3V (28Hz), 4V (37Hz), 5V (46Hz))과 자극 시간(1.5s, 2.5s, 3.5s, 4.5s) 수준의 조합을 바탕으로 진동 자극을 제공하였으며, 종속변수로는 에러율(Error rate)과 선호도(Preference)로 측정하였다. 에러율은 전압과 자극 시간 수준의 조합을 제시하여 진동을 느끼는지 여부를 판단하고, 선호도는 진동의 높은 전압과 자극 시간이 길어짐에 따라 점차 직관적으로 인식할 수 있지만 반대로 강력한 진동과 자극 시간은 불쾌감을 제공할 수 있기 때문에 이를 판단할 수 있는 결과로 활용할 수 있도록 7 - point Likert scale로 선호도를 평가하였다. 추가적으로 3개의 위치(Seat back & pan, Seat back, Seat pan)에서 각 위치에서 전압 수준과 자극 시간 수준을 모두 경험한 후 7 - point Likert scale로 선호도를 평가하여 선호도가 높은 자극 위치를 알아보고자 한다.
2.5 Procedure
본 실험의 절차는 다음과 같다. 선행 연구(Spence and Ho, 2008)에 따르면 두꺼운 옷을 입는 경우에도 촉각 경고의 효과가 감소할 수 있음을 언급함에 따라 이를 참고하여 실험에 참여하기 전 피실험자들에게 복장에 대한 주의 사항을 안내하였으며, 이후 실험에 참여하는 피실험자에게 연구 목적과 절차에 대한 설명 후 참여 동의 및 인구통계학 특성에 대한 사전 설문을 받은 후, 체성 감각 이상 여부를 확인하기 위해 시트에 앉아 각기 다른 진동 세기의 두 가지 자극을 제시하여 두 자극의 차이를 식별하는지 사전검사(Pretest)를 진행하였다. 본 실험을 통해 피실험자는 독립변수 수준의 총 20가지 조합(전압(5) × 자극 시간(4))으로 5회 반복 제공하여 총 100회의 자극을 순서대로 제시하였으며, Counterbalancing을 통해 수행하였다. 피실험자의 반복 실험 수행으로 인한 피로도를 고려하여 20회마다 휴식시간을 부여하였으며, 이후 3개의 위치(Seat back과 Seat pan 그리고 Seat back & pan)에 대한 자극의 선호 위치를 알아보기 위해 3개의 위치에서 20가지 조합(전압(5) × 자극 시간(4))의 자극을 경험해본 후 선호도를 평가하였다.
3.1 Error rate
에러율(Error rate)에 대한 분산분석(ANOVA) 결과, Table 1과 같이 전압(Volt), 자극 시간(Time), 전압(Volt)*자극 시간(Time) 교호작용 모두 통계적으로 유의미한 차이가 있었으며, 성별과 연령 간 차이는 유의하게 나타나지 않았다.
|
Source |
Type lll SS |
DF |
MS |
F |
p-value |
|
|
Volt |
857576.000 |
4 |
214394.000 |
2601.433 |
.000** |
|
|
Time |
14983.333 |
3 |
4994.444 |
60.602 |
.000** |
|
|
Volt * Time |
24946.667 |
12 |
2078.889 |
25.225 |
.000** |
|
|
Sex |
120.014 |
1 |
733.938 |
0.075 |
0.784 |
|
|
Age |
5871.500 |
8 |
450.590 |
0.458 |
0.886 |
|
|
Tukey HSD |
Volt |
5V, 4V < 3V < 2V <
1V |
||||
|
Time |
4.5s, 3.5s < 2.5s <
1.5s |
|||||
|
*p<0.05, **p<0.01 |
||||||
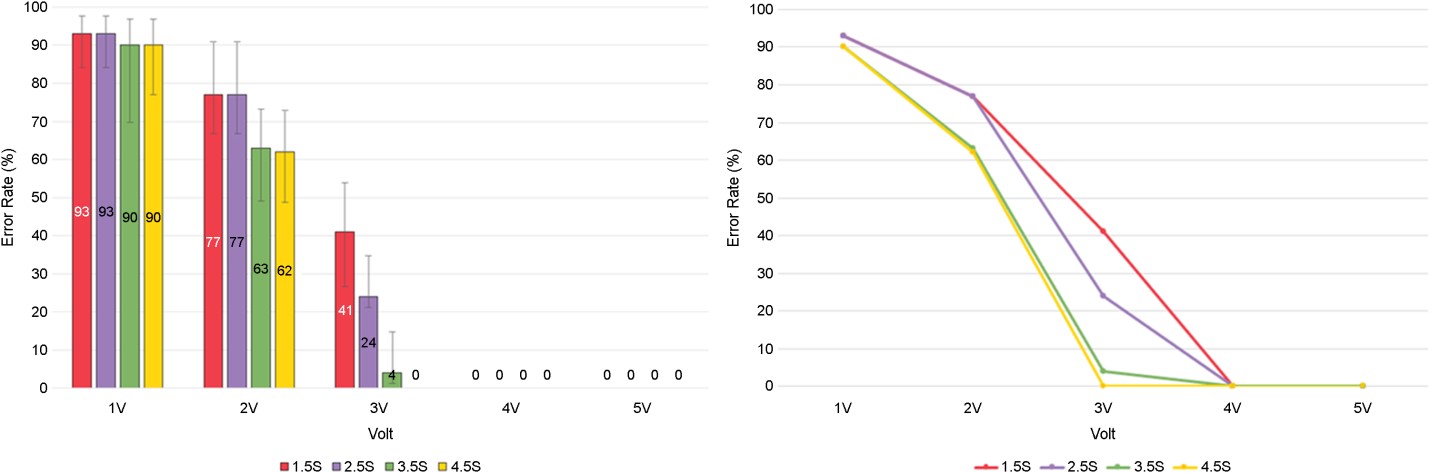
입력 전압(Volt) 수준이 점차 높아지고, 자극 시간(Time) 수준이 점차 길어짐에 따라 진동 자극의 인식 오류가 감소하고 직관적으로 인식할 수 있었다. 전압(Volt)의 경우 3V부터 에러율이 급격하게 감소하는 경향을 보였고, 4V 이후부터는 에러율이 발생되지 않았으며, 자극 시간(Time)의 경우 1~3V에서는 1.5s가 가장 에러율이 높게 나타났으며, 3.5s, 4.5s에서 에러율이 감소되는 경향을 보였다. 전압(Volt)*자극 시간(Time) 간 에러율을 보았을 때 3V, 4.5s부터 에러율이 발생되지 않음을 확인할 수 있다(Figure 5). 사후분석 결과로 전압(Volt)의 경우 5V, 4V는 동일한 집단군으로 형성되면서 에러율이 가장 낮게 나타났으며, 3V에서 1V로 갈수록 점차 높은 에러율을 보였다. 자극 시간(Time)의 경우 4.5s, 3.5s는 동일한 집단군으로 형성되면서 에러율이 가장 낮게 나타났으며, 자극 시간이 짧을수록 높은 에러율을 보였다.
3.2 Preference
선호도(Preference)에 대한 분산분석(ANOVA) 결과, Table 2와 같이 전압(Volt), 자극 시간(Time), 전압(Volt)*자극 시간(Time) 교호작용 모두 통계적으로 유의미한 차이가 있었으며, 성별과 연령 간 차이는 유의하게 나타나지 않았다.
|
Source |
Type lll SS |
DF |
MS |
F |
p-value |
|
|
Volt |
1017.000 |
4 |
254.250 |
1075.863 |
.000** |
|
|
Time |
154.793 |
3 |
51.598 |
218.337 |
.000** |
|
|
Volt * Time |
426.973 |
12 |
35.581 |
150.562 |
.000** |
|
|
Sex |
0.037 |
1 |
0.037 |
0.013 |
0.911 |
|
|
Age |
4.143 |
8 |
0.518 |
0.175 |
0.994 |
|
|
Tukey HSD |
Volt |
1V < 2V < 3V < 4V
< 5V |
||||
|
Time |
4.5s < 1.5s < 2.5s,
3.5s |
|||||
|
*p<0.05, **p<0.01 |
||||||
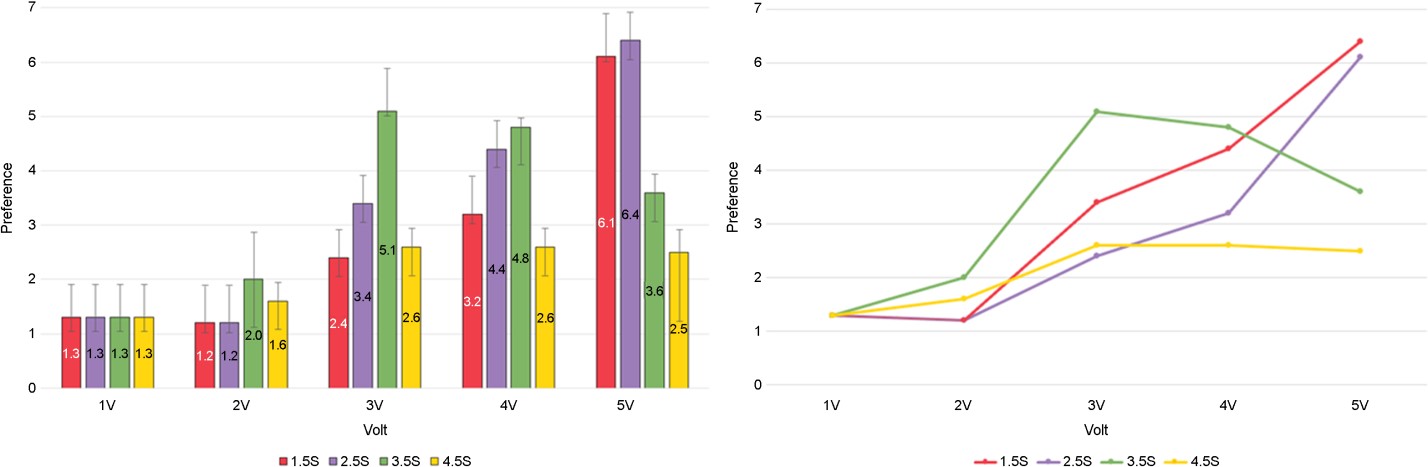
입력 전압(Volt) 수준이 점차 높아지고, 자극 시간(Time) 수준이 점차 길어짐에 따라 전반적으로 진동 자극이 직관적으로 인식되면서 선호도가 높아지는 것을 확인할 수 있었지만, 진동 세기에 따른 자극 시간에 대한 특이점을 확인하였다. 전압(Volt)의 경우 3V부터 선호도가 급격하게 증가하는 것을 알 수 있으며, 자극 시간(Time)의 경우 1~2V에서는 자극 시간에 따른 선호도 차이가 없었지만, 선호도 점수가 높아지는 구간인 3V와 4V는 3.5s, 2.5s 순으로 높은 선호도를 보였으며, 1.5s와 4.5s에서 자극 시간이 진동을 인식하는데 너무 짧거나 또는 길어서 선호도 점수가 떨어지는 경향을 보였으며, 5V의 경우 2.5s, 1.5s 순으로 높은 선호도를 보인 반면 3.5s, 4.5s의 선호도가 급격하게 떨어짐을 확인할 수 있었다. 즉, 진동 세기는 5V부터 자극 시간이 길어짐에 따라 선호도가 낮아지는 것을 알 수 있다(Figue 6). 사후분석 결과 전압(Volt)의 경우 1V에서 5V는 모두 독립적인 집단으로 형성되었으며, 전압이 증가할수록 점차 선호도가 증가하는 것을 보였다. 자극 시간(Time)의 경우 가장 긴 자극 시간(4.5s)과 가장 짧은 자극 시간(1.5s)은 독립적인 집단으로 나타났으며, 2.5s, 3.5s는 동일한 집단군으로 형성되면서 가장 높은 선호도를 보였다.
본 실험의 목적은 피실험자가 진동 자극을 수용할 수 있는 수준과 자극 시간에 따른 유의미한 차이가 있는지 파악하기 위한 조사를 수행하였다. 실험을 통해 시트의 진동 세기(전압)와 자극 시간을 여러 조합으로 제공했을 때 피실험자가 촉각적으로 인식 가능한 진동의 세기 수준 및 선호도가 높은 진동 자극 시간을 도출하고, 피실험자의 시트 진동 자극에 대한 선호 위치를 확인하였다. 진동의 세기(전압)와 자극 시간 간의 유의한 차이가 있는지 확인하기 위한 정량적 지표로는 에러율(Error rate)과 정성적 지표로는 선호도(Preference)를 통해 알아보았으며, 실험 결과 사용자에게 제공되는 진동의 세기와 자극 시간에 대한 유의미한 차이를 발견했다.
에러율 결과를 통해 진동 자극 시 전압(Volt)에서 1V (9Hz), 2V (18Hz)의 경우 진동을 식별 해내기 어려움을 느꼈으나 3V (28Hz)부터 대부분의 피실험자가 진동 자극을 인식하면서 에러율이 급격하게 감소하는 경향을 보였고, 4V (37Hz)부터는 에러율이 발생되지 않았다. 이는 최소한의 진동 자극으로는 3V (28Hz) 수준에서 고려해야 하는 것으로 해석될 수 있다. 자극 시간(Time)에서는 1~3V까지 1.5s에서 가장 높은 에러율이 발생되었으며, 3.5s, 4.5s에서 에러율이 감소하는 경향을 보였는데 이는 진동의 세기가 낮을수록 자극 시간이 길어짐에 따라 진동 자극을 식별해 내기 용이하며, 짧은 자극 시간은 인식하기에 어려움을 느끼는 것으로 해석된다.
선호도 결과에서는 3V부터 진동 자극에 대한 선호도 점수가 급격하게 증가함을 확인할 수 있었으며, 3V (28Hz), 4V (37Hz)에서 3.5s, 2.5s, 순으로 선호도가 높게 나타나는 반면, 1.5s, 4.5s는 선호도 점수가 낮게 나타났으며, 5V (46Hz)부터는 2.5s, 1.5s 순으로 높은 선호도 점수를 보이다가 3.5s부터 점차 선호도 점수가 낮게 나타나는 경향을 확인할 수 있었다. 이를 통해 자극의 강도가 낮을수록 자극을 확실하게 식별하기 위해서는 긴 자극 시간을 선호하고, 자극의 강도가 높아짐에 따라 점차 짧은 자극 시간을 선호하는 것으로 해석될 수 있으며, 즉, 진동의 세기에 따라 선호하는 자극 시간의 차이가 있음을 확인하였다.
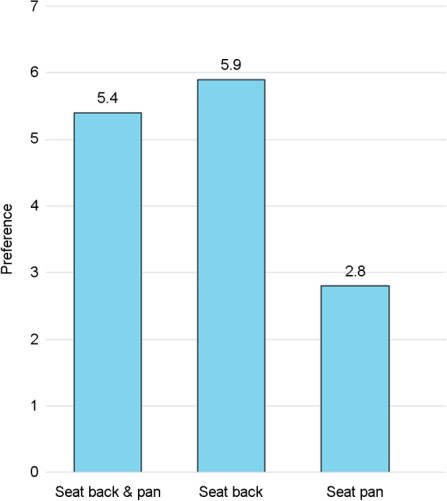
시트 진동 자극 위치 선호도 결과로는 진동 자극에 대한 시트 위치 간 유의미한 차이가 있었으며(F = 216.587, p < .001), Seat back, Seat back & pan, Seat pan 순으로 선호함을 알 수 있다(Figure 7).
본 연구는 차량 시트의 Haptic feedback에 대한 조사를 진행하기 위함으로 진동 전압 수준과 자극 시간 수준을 제공하여 사용자가 촉각적으로 진동 인식이 가능한 전압 수준과 자극 시간에 대한 유의미한 결과를 도출하였으며, 시트 진동 자극의 선호 위치를 확인할 수 있었다.
본 실험 결과를 정리하면, 진동의 강도는 3V (28Hz)부터 직관적으로 인식하기 시작하며, 자극 시간으로는 진동의 에러율이 급격히 낮아지는 구간인 3V (28Hz)와 4V (37Hz)에서 3.5s, 2.5s 순으로 선호하였고, 1.5S, 4.5S는 낮은 선호도를 보였다. 5V (46Hz)에서는 2.5s, 1.5s 순으로 선호하였으며, 그 이상으로 자극될 경우 선호하지 않는 것을 확인하였다. 시트 진동 자극의 선호 위치로는 Seat back을 가장 선호하는 것으로 확인하였다.
본 연구를 통해 도출된 사용자의 진동 인식에 대한 최소 전압 세기 및 진동의 수준과 자극 시간의 결과를 통해 향후 차량 시트의 Haptic feedback 설계 시 도움이 되는 자료로 활용될 수 있으며, 본 연구의 한계로는 촉각 자극에 대하여 진동의 최소 식별 수준과 진동 세기(전압) 및 자극 시간은 본 연구를 통해 확인하였지만, Haptic feedback 제공을 위해서는 이번 연구 결과를 바탕으로 자극 시차를 확인하여 최적의 진동 자극 조합을 도출해 내는 후속 연구가 필요하다.
References
1. Chang, W., Hwang, W. and Ji, Y.G., Haptic seat interfaces for driver information and warning systems. International Journal of Human-Computer Interaction, 27(12), 1119-1132, 2011. doi:10.1080/10447318.2011.555321
Google Scholar
2. De Winter, J.C., Happee, R., Martens, M.H. and Stanton, N.A., Effects of adaptive cruise control and highly automated driving on workload and situation awareness: A review of the empirical evidence. Transportation Research Part F: Traffic Psychology and Behaviour, 27, 196-217, 2014. doi:10.1016/j.trf.2014.06.016
Google Scholar
3. Dogan, E., Honnêt, V., Masfrand, S. and Guillaume, A., Effects of non-driving-related tasks on takeover performance in different takeover situations in conditionally automated driving. Transportation Research Part F: Traffic Psychology and Behaviour, 62, 494-504, 2019. doi:10.1016/j.trf.2019.02.010
Google Scholar
4. Endsley, M.R., Toward a theory of situation awareness in dynamic systems. Human Factors, 37(1), 32-64, 1995. doi:10.1518/ 001872095779049543
5. Gu Ji, Y. and Jin, B.S., Development of the conceptual prototype for haptic interface on the telematics system. International Journal of Human-Computer Interaction, 26(1), 22-52, 2009. doi:10.1080/10447310903025545
Google Scholar
6. Ji, Y.G., Lee, K. and Hwang, W., Haptic perceptions in the vehicle seat. Human Factors and Ergonomics in Manufacturing & Service Industries, 21(3), 305-325, 2011. doi:10.1080/10447318.2011.555321
Google Scholar
7. Lee, J.D., Hoffman, J.D. and Hayes, E., Collision warning design to mitigate driver distraction. In Proceedings of the SIGCHI Conference on Human factors in Computing Systems (pp. 65-72), 2004. doi:10.1145/985692.985701
Google Scholar
8. Morales-Alvarez, W., Sipele, O., Léberon, R., Tadjine, H.H. and Olaverri-Monreal, C., Automated driving: a literature review of the take over request in conditional automation. Electronics, 9(12), 2087, 2020. doi:10.3390/electronics9122087
Google Scholar
9. Morley, J.W. and Rowe, M.J., Perceived pitch of vibrotactile stimuli: effects of vibration amplitude, and implications for vibration frequency coding. The Journal of Physiology, 431(1), 403-416, 1990. doi:10.1113/jphysiol.1990.sp018336
Google Scholar
10. Morrell, J. and Wasilewski, K., Design and evaluation of a vibrotactile seat to improve spatial awareness while driving. In 2010 IEEE Haptics Symposium (pp. 281-288). IEEE, 2010. doi:10.1109/HAPTIC.2010.5444642
Google Scholar
11. Riener, A., Age-and Gender-Related Studies on Senses of Perception for Human-Vehicle-Interaction. In Workshop Proceedings der Tagungen Mensch & Computer 2008, DeLFI 2008 und Cognitive Design 2008. Logos Verlag, 2008. https://dl.gi.de/handle/ 20.500.12116/6990 (retrieved August 29, 2021).
Google Scholar
12. Spence, C. and Ho, C., Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics, 1(2), 121-129, 2008. doi:10.1109/TOH.2008.14
Google Scholar
13. Tan, H., Gray, R., Young, J.J. and Taylor, R., A haptic back display for attentional and directional cueing, 2003. http://hdl.handle.net /1773/34886 (retrieved July 29, 2021)
Google Scholar
14. Telpaz, A., Rhindress, B., Zelman, I. and Tsimhoni, O., Haptic seat for automated driving: preparing the driver to take control effectively. In Proceedings of the 7th international conference on automotive user interfaces and interactive vehicular applications (pp. 23-30), 2015. doi:10.1145/2799250.2799267
Google Scholar
15. Tijerina, L., Johnston, S., Parmer, E., Winterbottom, M.D. and Goodman, M., Driver distraction with wireless telecommunications and route guidance systems (No. DOT HS 809-069). United States. National Highway Traffic Safety Administration, 2000.
Google Scholar
16. Van Erp, J.B. and Van Veen, H.A., Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour, 7(4-5), 247-256, 2004. doi:10.1016/j.trf.2004.09.003
Google Scholar
17. Wan, J. and Wu, C., The effects of vibration patterns of take-over request and non-driving tasks on taking-over control of automated vehicles. International Journal of Human-Computer Interaction, 34(11), 987-998, 2018. doi:10.1080/10447318.2017.1404778
Google Scholar
PIDS App ServiceClick here!