eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Hee-Sok Park
10.5143/JESK.2017.36.5.421 Epub 2017 October 31
Abstract
Objective: In this research, the literatures on the autonomous vehicles were surveyed and classified from the viewpoint of human factors. Technological development on the information interaction between user and the vehicle was discussed.
Background: The studies on the human factors in the autonomous vehicles have been less actively carried out than those on the technological aspects, but human factors are becoming more important in the autonomous vehicles.
Method: This study examined the papers published in domestic journals, as well as the papers presented in conferences from 1996 to 2016 through DBPIA.
Results: The literatures were classified into those about basic functions and convenience. The papers on the convenience were much less.
Conclusion: Human factors are projected to be actively applied, in communication and in device control, in addition to conventional application areas.
Application: This study would be of help to find future research areas of human factors in autonomous vehicles.
Keywords
Autonomous vehicle Human factor Review
자율주행 자동차는 첨단 IT 기술을 이용하여 사람의 개입을 줄여서 운행이 가능한 자동차를 뜻하며(Jang, 2016), 자율적으로 차량 주변의 환경과 다양한 상황을 판단하여 정해진 목적지까지 안전하게 이동하는 것을 목표로 한다. 2010년 구글의 자율주행 자동차 개발 계획 의 공식 발표를 필두로 BMW, 벤츠, 볼보, GM, 테슬라 등 다양한 자동차 업계와, 구글, 애플 등의 IT 업계의 자율주행 자동차에 대한 지속적인 연구가 수행되고 있다.
미국 도로교통안전국(National Highway Traffic Safety Administration: NHTSA)에서는 자율주행 자동차의 개발단계를 5가지 수준으로 나누고 있다(Yu and Kang, 2016). 수준 0은 Non-Automation으로 주행 보조 장치가 없는 경우이다. 수준 1은 Function-specific Automation으로 단일 주행 보조기능을 갖추고 있는 형태이다. 여기서 단일 주행 보조기능은 긴급 제동 장치, 차선 유지 장치, 자동 속도 조절 장치 등을 의미한다. 수준 2는 Combined Function Automation으로 복수의 주행 기능 융합으로 운전자를 보조하는 것을 말하며, 단일 주행 보조기능이 혼합되어 운전자를 보조하는 것이다. 수준 3은 Limited Self-Driving Automation으로 제한적인 상황에서의 자율주행을 수행하는 것이다. 이 수준에서는 도로에서 자율주행이 가능하나, 위급 상황 시 운전자의 개입을 필요로 한다. 수준 4는 Full Self-Driving Automation으로 모든 환경에서 운전자의 개입을 필요로 하지 않는 완전한 자율주행을 의미한다.
2017년 현재까지 수준 2까지 상용화되었으며, NHTSA에 따르면 2030년에는 수준 3까지 진화할 것 이라고 한다(Park and Jung, 2017). 이는 기존 자동차 산업의 범위를 벗어나 구글, 애플, 네이버 등 빠른 속도로 발전되는 IT 기술 덕택이라 할 수 있다. 자율주행 자동차의 상용화가 가시화된 지금, 자율주행 자동차의 기술적인 측면뿐만 아니라, 관련된 법과 제도, 기술의 표준화, 사용자의 편의성과 관련해서는 무수히 많은 과제가 남겨져 있다고 볼 수 있다(Sung, 2016).
특히 자율주행 자동차에 관한 기술적인 부분의 발전과 더불어, 직접 사용하는 운전자에 관한 연구도 지속적으로 이루어져야 한다. 하지만, 현재까지 자율주행 자동차에 있어 운전자의 차량 내 행동에 관한 연구는 기술적인 연구에 비해 상대적으로 뒤쳐져 있다(Lee et al., 2017). 그러나 기술적인 측면에 못지않게 인적인 요소에 대한 측면 역시 중요하게 여겨져야 한다. 2016년 5월 미국 플로리다에서 발생한 테슬라 전기자동차 모델S의 사고가 이를 뒷받침하는 사례이다. 최근 미국 연방교통안전위원회(National Transportation Safety Board: NTBS)의 보고서에 따르면, 운전자는 테슬라 자동차의 자율주행 보조 시스템인 '오토 파일럿'으로 운행을 하던 중 다수의 경고를 무시했으며, 자율주행 자동차와 운전자간 Information Interaction 부족으로 인한 사고로 간주되고 있다(NTBS, 2017).
본 논문에서는 자율주행 자동차의 기술관련 현황에 대한 문헌들을 조사하여 분야별로 분류하였고, 특히 인간공학적인 측면에 집중하였다. 즉, 사용자와 자율주행 자동차 간의 효과적이고 효율적인 Information Interaction을 중점으로 실제 상용화에 필요한 인간공학 분야 기술의 발전 정도를 확인하고, 앞으로의 연구방향을 제시하고자 한다.
본 연구는 문헌연구로서, DBPia 등 학술데이터베이스에 수록된 국내 자료 중 1996년부터 2017년 6월까지 발표된 학술저널, 학술대회 발표자료, 전문지에 수록된 논문을 조사대상으로 하였다. 검색 키워드로는 '자율주행 자동차', '자율주행', '자동차 자율' 및 관련 용어의 조합을 이용하여 검색하였다. 검색된 자료는 총 305건이었으며, 본 연구의 범위와 직접적으로 관련이 있는 284건의 자료를 분석대상으로 하였다.
타 연구에서는 자율주행 자동차와 관련한 IT 기술을 단순히 하드웨어와 소프트웨어로 분류하였다(Jang, 2016). 또는 인식기술이나 경로 계획 기술 등 단순 분야에 대해서 분류하고 연구를 수행하였지만, 본 연구에서는 자율주행 자동차와 관련된 기술을 최대한 총망라하고자 하였다.
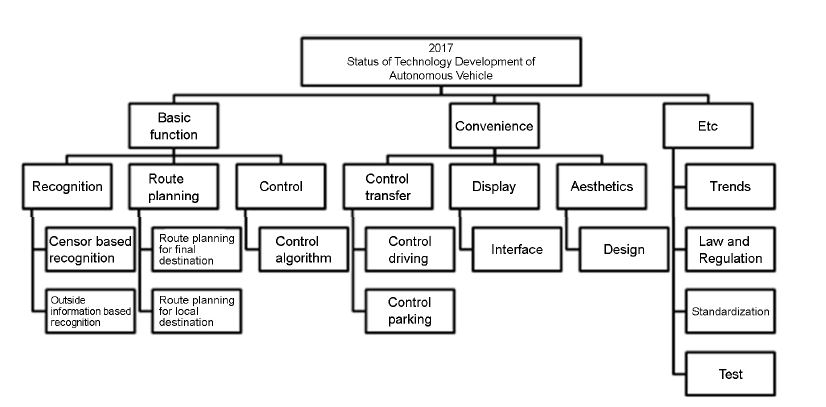
우선, 검색된 자료를 분류하는데 기준이 되는 분류체계를 수립하였다. 분류체계의 상위 기준은 실제 운전자와 밀접한 interaction이 있는가의 여부로 결정하였다. 밀접한 interaction이 없는 시스템과 요소 기술은 '기본기능'으로 명명하였으며, 다시 자율주행 자동차의 주행 프로세스에 의거하여 세부 분류하였다. 즉, 자율주행 자동차는 외부 주행환경을 인식하고 이를 판단하여 주행전략을 수립하며, 차량을 제어하는 프로세스로 작동한다(Lee, 2016). 이 프로세스에 의거하여 세부 분류를 진행하였다. 또한 운전자와의 interaction이 있는 기술은 '편의성'으로 분류하였다. 이는 다시 자동차와 운전자간 제어권 이양, 자동차의 상태나 다양한 지시사항을 전달하는 디스플레이, 사용자의 편의성 향상을 위한 심미성 분야로 세분화하였다. 그 외, 최근 동향, 법과 제도, 기술 표준화, 실험 및 테스트 분야의 자료는 '그 외' 항목으로 분류하였다. (Figure 1)에 본 연구에서 채택된 분류체계를 도식화하였다.
연구방법에서 설정한 분류체계에 의거하여 284건의 국내 자료를 분류하였으며, 각 분류 항목별로 해당 분야의 연구의 동향을 잘 나타내고 있는 몇몇 대표적인 논문들을 선정하여(Table 1)~(Table 3)로 제시하였다.
3.1 Basic function
자율주행 자동차는 주위 도로나 사물을 인식하고, 인식한 정보를 기반으로 차체가 진행해 나갈 경로를 계산한다. 그 다음, 그 경로로 주행을 진행하기 위한 제어를 시행한다(Lee, 2016). 이러한 세 가지 프로세스를 거쳐 자동차는 자율주행을 실현할 수 있으며, 이러한 기능을 '기본기능'으로 명명하였다.
3.1.1 Recognition
자율주행 자동차는 레이더, Lidar (Light detection and ranging: 레이저 광선을 이용한 레이더), 카메라, 초음파센서, GPS (Global Positioning System) 등과 같은 각종 기능에서 획득한 정보를 이용하여 주위상황을 인식한다(Lee, 2015).
|
Title |
Author |
Year |
|
A study of crosswalk recognition for autonomous vehicles |
Park and Cho |
2010 |
|
Unmanned Ground Vehicle's Speed Plan from Image Data Through Pedestrian Detection of Color Element |
Min et al. |
2013 |
|
Effective Recognition of Low Resolution Traffic Signs for Autonomous Driving |
Im et al. |
2013 |
|
Illumination Tolerant Traffic Sign Recognition Algorithm for Autonomous Vehicle |
Lee et al. |
2013 |
|
Physics Based Camera
Sensor Model Simulation for Development of ADAS and |
Cho et al. |
2015 |
|
Fast Recognition Algorithm of Traffic Light Sign by Color and Shape Feature |
Kim et al. |
2016 |
|
Method of Detection to Object by Using Monocular Vision of Autonomous Vehicle |
Yoon and Kim |
2016 |
인식과 관련해서는 센서 기반 인식과 외부 정보 기반 인식으로 세부 분류할 수 있다. 센서 기반 인식은 카메라나 Lidar를 이용하여 주변의 도로와 사물, 보행자를 인식하는 기술이다. 도로의 차선과 신호등은 주로 카메라를 이용하여 인식하며, 장애물이나 보행자는 Lidar 기술을 이용하여 인식한다. 센서 기반 인식은 사람의 오감에 대응한다고 볼 수 있다.
최근 연구(Yoon and Kim, 2016)에서는 저가의 단안 카메라를 통해 자율주행 차량이 도로 위를 운행 시 효율적으로 전방 장애물을 검출할 수 있는 방법을 제안하였다. 그 결과는 Lidar 센서와 단안 카메라를 융합하여 차량을 검출한 결과와 동등한 성능을 보였다. 앞으로는 기존에 이루어졌던 인식 기법에서 나아가, 저가 장비를 이용한 효율적인 인식에 대한 연구가 필요할 것으로 보인다.
|
Title |
Author |
Year |
|
LiDAR Point Cloud Data Clustering and Classification for Obstacle Recognition of UGV |
Yoon et al. |
2012 |
|
Environment Perception Using LiDAR Sensor Tilting Mechanism for Autonomous Vehicle |
Kim et al. |
2013 |
|
Data Set Implementation and
Methodology using Multiple LiDARs for the Intelligent |
Byun et al. |
2014 |
|
Research and Development LIDAR for Autonomous Car |
Lee |
2015 |
|
A Research of Road Marking
Perception Method for Autonomous Vehicle using 2D |
Yang et al. |
2016 |
|
A Study on Development of LIDAR Sensor Tilting Mechanism Considering the Driving Environment of Autonomous Vehicle |
Oh et al. |
2016 |
|
Calibration Method between Two 3D LIDARs for Autonomous Vehicle |
Kim and Park |
2016 |
다른 연구(Kim and Park, 2016)에서는 기존 3D Lidar의 각도의 한계와 차체 프레임의 가려짐으로 인한 사각지역의 인식을 보완하고자하는 연구를 진행하였다. 단일 고채널 Lidar와 유사한 고해상도의 정보획득이 가능한 저채널의 Lidar를 두 대 이상 사용한 경우를 비교하였다. 추후 카메라 인식 기술과 마찬가지로 저가형 장비를 이용한 효율적인 인식 기술에 대한 연구가 진행될 것으로 보인다.
외부 정보 기반 인식은 센서 기반 인식과 달리 외부의 정보를 이용하여 차체의 위치를 인식하는 기술이다. 기존 GPS에만 의존했던 인식에서 벗어나, 차량과 차량 사이의 무선 통신(V2V: Vehicle to Vehicle), 차량과 인프라 간 무선 통신 등 차량과 주변 사물과의 통신을 이용하여 주변 사물과 도로 정보를 인식하는 기술을 뜻한다.
실외 환경에서는 GPS나 주변 사물과 도로 정보와의 통신을 이용하여 차체의 위치나 주변의 정보를 인식해왔다. 하지만 GPS가 정전되는 경우로 인하여 실내 환경에서의 차체 위치인식에는 한계가 존재하였다. 이와 관련된 연구(Jeon and Kim, 2016)에서는 자석 지도 정보와 자기장 인식 센서로 미리 구축된 자석을 인식하여 차량의 현재 위치를 인식하는 연구를 진행하였다.
|
Title |
Author |
Year |
|
Position Recognition of Autonomous Vehicles via GPS and Vehicle Sensor Data Fusion |
Kim and Hong |
2013 |
|
Direction of Connected Car Development in the era of autonomous driving |
Kim |
2014 |
|
How Does "Always connected" Influence the Tasks and Products of a Global Supplier? |
Chang |
2014 |
|
Development of Autonomous Vehicle using Kinect Vision sensor and Indoor GPS |
Myeong et al. |
2015 |
|
V2X communication technology for collaborative autonomous driving |
Oh et al. |
2016 |
|
Indoor Localization System Based on Magnetic Map for Autonomous Driving |
Jeon and Kim |
2016 |
3.1.2 Route planning
경로 생성과 관련해서는 최종 목적지 경로 생성([Table 4] 참조)과 주행 중 지역 경로 생성기능([Table 5] 참조)으로 분류할 수 있다. 주변의 환경 정보를 인식하여 안전한 도로를 인식하는 과정은 지역적 경로를 계획하는 것이며, 최종 목적지를 기억하고 목적지를 향해가는 과정은 전역적 경로를 계획하는 것이다(Woo et al., 2009).
전역 경로 계획에서는 사전에 구축된 위상그래프를 사용하여 경로 계획을 하며, 생성된 전역 경로는 지역 경로 생성의 바탕이 된다. 이와 관련된 연구(Kim et al., 2011)에서는 시뮬레이션 실험을 통하여 임의로 변경되는 교통 정보와 장애물 구역을 설치하고, 실시간으로 생성되는 전역 및 지역 경로를 생성하여 주행하였다. 추후 위상그래프에 포함되지 않는 도로의 폭, 차선의 형태 등 다양한 도로규약 정보를 포함한 경로계획 연구가 필요할 것으로 보인다.
|
Title |
Author |
Year |
|
The Development of a SLAM Algorithm for Global 2D Map using Unmanned Ground Vehicle |
Lee et al. |
2009 |
|
Implementation of Global and Local Planning for Autonomous Vehicle in Urban Environments |
Kim et al. |
2011 |
|
A study on establishment of database for autonomous-driving in downtown |
Park et al. |
2015 |
주행 중 지역 경로 생성은 영상 카메라나 Lidar를 이용하여 인식한 도로와 보행자 정보 등을 이용하여 차량 바로 앞의 경로를 생성하는 기술이다. 차선을 따라가는 경로 생성부터 타 차량을 추월하거나 장애물을 회피할 경로를 생성하는 기술을 뜻한다. 이러한 지역 경로 생성 기술은 전역 경로 간에 불연속적인 지점을 제거하는 부분, 생성된 전역 경로상의 다양한 후보 지역경로를 생성하는 부분, 정적 및 동적 물체와의 충돌을 회피할 수 있는 최적 경로를 생성하는 부분, 제한 속도를 기반으로 속도를 결정하는 부분으로 구성된다(Yoo et al., 2015).
|
Title |
Author |
Year |
|
Research of the Optimal Local & Global Path Planning for Unmanned Ground Vehicle |
Woo et al. |
2009 |
|
Path Planning for Static Obstacle Avoidance: ADAM III |
Choi and Song |
2014 |
|
Local Path Planning based on Collision Risk Estimation for Autonomous Driving |
Yoo et al. |
2015 |
|
Path Planning and Decision about Driving Environment using Road Database for Autonomous Vehicle |
Choi et al. |
2015 |
|
A Research of Obstacle Detection and Path Planning for Lane Change of Autonomous Vehicle in Urban Environment |
Oh et al. |
2015 |
|
A Study on Path Planning to Ensure Lateral Stability of an Autonomous Vehicle equipped with LiDAR Sensor |
Ahn et al. |
2016 |
|
The Research of Stable Path Access of Autonomous Vehicle |
Kim and Kim |
2016 |
3.1.3 Control
제어 알고리즘은 차량의 이동 궤적, 속도, 조향각 등을 제어하는 알고리즘과 관련된 연구이다([Table 6] 참조). 이와 관련하여 Kwak et al. (2016)에서는 1초에 100번씩 차량의 거동을 측정하여 실시간성을 보장하고, 이 정보들을 통해 정확한 위치와 방향성분들을 추정한 끝에 제어하는 연구를 수행하였다. 앞으로는 연구된 제어 알고리즘을 다양하고 일반적인 도로환경에서 검증하는 것이 필요하다.
|
Title |
Author |
Year |
|
A Lane-change Collsion Avoidance Algorithm for Autonomous Vehicles
and HILS |
Ryu and Kim |
1999 |
|
Development of Autonomous Vehicle Control Algorithm Based on GPS
and 6WD/6WS |
Kim et al. |
2008 |
|
A Study on algorithm for autonomous navigation of unmanned ground
vehicle and its |
Cho |
2010 |
|
Longitudinal control system of autonomous car for consideration environment |
Park et al. |
2015 |
|
Development of Vision-based Body Slip Angle Estimation Method for Scale Car-based Autonomous Driving Environment |
Kwak et al. |
2016 |
|
A Study of Real-Time Position Tracking System and Control of Scaled Car for Autonomous Driving Performance |
Kwak et al. |
2016 |
|
A study on Fuzzy control system apply to the acceleration profile for the autonomous-driving in urban street |
Yoon et al. |
2016 |
3.2. Convenience
운전자의 편의성 증대를 위한 다양한 연구를 '편의성' 분야로 분류하였다. 주목할 것은, 편의성에 관한 연구가 '기본기능'에 관련한 연구에 비해 검색된 자료의 수가 현격하게 적었다.
3.2.1 Control transfer
NHTSA에서 정의한 수준 3의 자율주행 자동차에서는 주의(attention) 분산 및 신체 상황 인식 등을 통하여 운전자의 상태를 판단하고, 운전자의 대응 가능 여부에 따라 운전자에게 제어권을 이양한다. (Table 7)에서 볼 수 있듯이, 이 부분에서 핵심적인 부분은 제어권이 이양되는 시점이며, 이때의 안전성을 보장하기 위한 연구가 이뤄지고 있다(Yun et al., 2016).
|
Title |
Author |
Year |
|
Design and Evaluation of Alert Threshold for Takeover Request in
Partial Autonomous |
Kim et al. |
2016 |
|
Trend and Plan of Driver-Vehicle Interface Safety for Autonomous Vehicle |
Yun et al. |
2016 |
|
Trend and Issue of Driver-Vehicle Interface for Autonomous Vehicle |
Yun |
2016 |
자율주행 자동차의 제어권과 관련하여 주차 시 제어에 관한 기능 또한 사용자의 편의성과 관련있다고 판단하였다. (Table 8)에서 볼 수 있듯이, 한정된 주차공간을 벗어나 도로 위의 장애물을 판단하고 회피하여 스스로 자율주차를 하는데 필요한 연구들이 진행 중에 있다(Kim et al., 2015).
|
Title |
Author |
Year |
|
Design of Intelligent Parking System for Autonomous Vehicle at the Slant Space |
Hao et al. |
2008 |
|
Standardization of Assisted Parking System for Advanced Driver Assist System |
Rha |
2014 |
|
Standardization Trends of Autonomous Parking for Autonomous Driving Vehicles |
Rha |
2015 |
|
Automated Parking for Self-Driving Cars |
Shahroz et al. |
2016 |
|
Parking Location Control Algorithm for Self-Driving Cars |
Shahroz and Park |
2016 |
3.2.2 Display
자율주행 자동차에서는 운전자는 직접 운전을 수행하는 운전자가 아닌, 자동차의 주행을 감시하는 감시자의 역할을 맡게 된다. 그렇기에 자동차의 다양한 상태를 효율적인 인터페이스 구성으로 운전자에게 정보를 신속, 정확하게 전달할 수 있어야 한다. 이 분야의 연구의 동향을 잘 나타내고 있는 몇몇 대표적인 논문들을 선정하여(Table 9)로 제시하였다.
|
Title |
Author |
Year |
|
Smart driving from HVI viewpoint |
Yang |
2014 |
|
Design and Evaluation of Human-Vehicle Interaction Driver
Interface for |
Eom and Lee |
2015 |
|
Exploring the User Experience for Autonomous Vehicle and the Role of Windshield Display: Based on Framework Approach |
Kim et al. |
2016 |
|
Case Study on Cognitive Affordance Applied to Digital Center
Fascia for Partial |
Lee et al. |
2017 |
|
The Effects of Feedback in an Automated Car |
Lee et al. |
2017 |
3.2.3 Aethetics
(Table 10)에서 볼 수 있듯이, 자율주행 자동차의 상용화가 눈앞에 다가온 만큼 실제 판매를 위한 디자인에 대한 연구도 시작되고 있다. 특히, 기존 일반 자동차에서 탑승자가 주행 정보를 습득하는 경로 중 하나인 청각 정보를 인공적으로 만들어 내는 연구 또한 흥미롭다 (Lee et al., 2015).
|
Title |
Author |
Year |
|
A Study on the Interior Driving Sound Enrichment Technique For
Autonomous |
Lee et al. |
2015 |
|
A Study on Driver Experience for Autonomous Vehicles in 2030 |
Park and Jung |
2017 |
3.3 Others
자율주행 자동차와 관련된 법과 제도, 기술의 표준화, 테스트 방법, 최신 동향에 관한 자료들이 이에 포함되었다([Table 11]~[Table 13] 참조). 특히, 법, 기술의 표준화 등 제도와 관련된 연구는 비교적 최근인 2016부터 많은 연구가 수행되고 있었음을 알 수 있었다.
|
Title |
Author |
Year |
|
Introduction and regulation of autonomous vehicles |
Jang |
2013 |
|
Zur rechtlichen Fragen von dem autonomen Fahrzeuge |
Yi and Kim |
2015 |
|
Improvement of the law and system for revitalize the autonomous vehicle |
Kang et al. |
2016 |
|
Autonomous Vehicle : Ethics as a robot and legal problems |
Lee |
2016 |
|
Liability Concerning Autonomous Car Accident |
Kwon and Lee |
2016 |
|
Study on Autonomous Vehicle's Safety from Angles of Public Law |
Kim |
2016 |
|
Legal Issues Related to Autonomous Vehicles |
Kim |
2016 |
|
Study Concerning Civil Liability about Car Accident of Self-Driving Car |
Lee |
2016 |
|
The Trend of International Safety Standard on Autonomous Vehicles |
Lee |
2016 |
|
A study on the appearance of the self-driving car and amendments
of the |
Park |
2016 |
|
Legislative Trends in the Autonomous Vehicle |
Kim |
2016 |
|
Title |
Author |
Year |
|
Autonomous Vehicle Standardization Activities in ISO Meeting at Vancouver 2014 |
Yu |
2014 |
|
Standardization technology and task of autonomous driving and smart car |
Kim |
2014 |
|
The Trend for Self-Driving Guideline on Autonomous Vehicles |
Choi |
2017 |
|
The Trend of International Organization for Standardization and
Technology of |
Choi |
2017 |
|
|
||
|
Title |
Author |
Year |
|
Development and Validation of Autonomous Driving Vehicle Technology based on MiLS |
Cho et al. |
2015 |
|
A Study on Methodology for Field Operational Tests of Automated
Vehicles applying |
Kang et al. |
2016 |
자율주행 자동차와 관련된 국내의 자료 중, 기계와 인간간의 Information Interaction을 다루는 분야에 대하여 좀 더 살펴보고자 한다.
HVI (Human-Vehicle Interaction)에 관한 연구(Yang, 2014)에 따르면, HVI는 인간과 자동차간의 원활하고 효과적인 정보교환을 목적으로 하여, human error를 줄이고 주행의 안정성을 높이는 데 연구의 목표를 두고 있다. 현재는 Adaptive Cruise Control이나 운전자 시선 분석을 통한 주의 분산에 관한 연구, 졸음 운전 탐지 알고리즘 개발의 연구가 진행 중에 있었다.
또한 자율주행 환경에서의 피드백 효과에 대한 연구(Lee et al., 2017)에 따르면, 상대적으로 위험도가 높은 환경에서는 청각 자극을 중심으로 촉각과 함께 피드백을 제공할 때 만족도와 효율성 모두 높아진다는 것을 확인할 수 있었다. 하지만 시각 조건은 기본 조건으로 통제하였고, 진동 자극의 강도에 대한 검증은 이루어지지 않았다.
나아가, 자율주행 자동차의 발전 수준이 높아짐에 따라 기존의 주행 보조 장치 기술은 불필요해지고, 운전자와 자동차간 인터페이스를 통한 Information Interaction이 더욱 중요해질 것으로 전망된다. 자율주행을 위한 인지적 어포던스 사례분석 연구(Lee et al., 2017)에서, 자동차 업계에서는 기존 단편적인 기능만 제공하던 물리적 센터페시아를 복합적이고 활용도가 높은 디지털 센터페시아로 교체하고 있는 추세이지만, 이는 오히려 운전자들에게 더 많은 인지적 부하를 일으킨다고 하였다. 이에 안전성과 사용빈도가 높은 기능은 물리적 버튼 형태로 제공되어야 한다는 결과를 제시하였다.
또한 Framework Approach를 이용한 자율주행 환경에서의 전방 유리 디스플레이의 사용자 경험에 관한 연구(Kim, 2016)에 따르면, 스마트폰이나 기존 IT 기기에서 수행하던 익숙한 인터랙션 방식을 사용하여 정보를 표시할 것을 제안하고 있다.
2017년 6월 현재 자율주행 자동차와 관련된 연구는 국내에서도 활발하게 이루어지고 있다. 다만 단순하게 연구 자료의 수로만 살펴보더라도 '편의성'과 관련된 분야의 연구는 '기능' 분야에 비해 미진하였다. 추후에는 자율주행 자동차의 기술자체에 대한 연구와 함께 편의성, Information Interaction과 관련된 인간공학 분야의 연구도 함께 활발하게 수행되어야 한다.
현재 자율주행 자동차의 개발 속도로 가늠할 때, 머지않아 수준 3의 자율주행 기술이 상용화 될 것이다. 이에 따라 기존의 운전자 보조기능 알림을 중심으로 이루어 졌던 HVI 관련 연구는 새로운 국면을 맞게 될 것으로 예상한다.
특히 자율주행 자동차가 서비스 플랫폼이 되면서 차량 내의 사용자 경험이 기존 자동차와는 크게 달라질 것이다. 자율주행의 수준이 높아질수록 사용자는 다른 과업을 수행할 여유가 생기므로 차량 내에서 보다 다양한 과업을 수행할 것이며, 자동화 기술이 고도화될수록 차량 내 사용자 경험은 큰 폭으로 변화하게 될 것이다. 따라서 자율주행 자동차를 설계할 때에 운전자의 경험을 총체적으로 고려해야 한다. 하지만 자율주행 자동차를 서비스 플랫폼으로 보는 시각이 많지 않다. 추후에는 자율주행 자동차를 바라보는 관점을 기술 위주의 관점에서 벗어나, 인간의 경험까지 고려한 통합적인 관점과 이와 관련된 연구가 필요하다.
추후 요구되는 연구의 예로, 자율주행 자동차는 최신의 기술이 적용된 제품이고, 안전과 아주 밀접하게 관련된 제품이다. 따라서 생소한 신기술의 집약체인 자율주행 자동차에 대해 사용자가 느끼는 높은 장벽과 두려움을 낮춰주는 방안에 대한 연구가 필요할 것이다. 또한 구체적인 수준에서는 오감을 이용하여 자동차와의 Information Interaction 할 수 있는 다양한 형태에 대한 연구가 필요할 것으로 보인다. 더 나아가, Interaction의 형태나 방법론뿐만이 아니라 정보 전달 및 교환의 시점에 대한 연구도 필요로 할 것이다.
References
1. Ahn, T.W., Yu, J.N., Ra, J.H., Jang, H.J. and Park, K.H., A Study on Path Planning to Ensure Lateral Stability of an Autonomous Vehicle equipped with LiDAR Sensor, Proceedings Of Conference of The Korean Society Of Automotive Engineers, 289-289, 2016.
Crossref
2. Byun, J.M., Na, K.I., Roh, M.C. and Seo, B.S., Data Set Implementation and Methodology using Multiple LiDARs for the Intelligent vehicle in various road environments, Proceedings Of Conference Of The Korean Society Of Automotive Engineers, 764-769, 2014.
Crossref
3. Chang, J.K. and How Does,
Crossref
Google Scholar
4. Cho, H., Kim, J.S. and Yoo, B.J., Physics Based Camera Sensor Model Simulation for Development of ADAS and Autonomous Driving System, Proceedings Of Conference Of The Korean Society Of Automotive Engineers, 652-652, 2015.
Crossref
5. Cho, Y.W., A Study on algorithm for autonomous navigation of unmanned ground vehicle and its 3D graphical simulation, Journal Of The Institute of Korean Electrical and Electronics Engineers, 14(4), 324-331, 2010.
Crossref
6. Choi, H.J. and Song, B.S., Path Planning for Static Obstacle Avoidance: ADAM III, Journal Of The Korean Society Of Automotive Engineers, 22(3), 241-249, 2014.
Crossref
Google Scholar
7. Choi, J.D., The Trend of International Organization for Standardization and Technology of Cloud-Connected Map for Autonomous Driving, Journal Of The Korean Society Of Automotive Engineers, 39(3), 27-30, 2017.
Crossref
8. Choi, S.H., The Trend for Self-Driving Guideline on Autonomous Vehicles, Journal Of The Korean Society Of Automotive Engineers, 39(5), 48-50, 2017.
Crossref
9. Choi, Y.G., Lim, K.I. and Kim, J.H., Path Planning and Decision about Driving Environment using Road Database for Autonomous Vehicle, Proceedings Of Conference Of The Korean Society Of Automotive Engineers, 550-550, 2015.
Crossref
10. Eom, H.S. and Lee, S.H., Design and Evaluation of Human-Vehicle Interaction Driver Interface for Auto Driving System, Proceedings Of Conference Of The Korean Society Of Automotive Engineers, 662-662, 2015.
Crossref
Google Scholar
11. Hao, T.H., Kim, T.K. and Choi, B.J., Design of Intelligent Parking System for Autonomous Vehicle at the Slant Space, Journal Of The Korean Institute of Intelligent Systems, 18(4), 506-511, 2008.
Crossref
Google Scholar
12. Im, D.J., Choi, W.J. and Hong, S.S., Effective Recognition of Low Resolution Traffic Signs for Autonomous Driving, Proceedings Of Conference Of The Korean Society Of Automotive Engineers, 1492-1493, 2013.
Crossref
13. Jang, B.I., Damage caused by Autonomous vehicles and product liability - Focusing on the discussion in Germany, Journal Of The Korean Law Association, 16(4), 73-103, 2016.
Crossref
14. Jang, H.B., Introduction and regulation of autonomous vehicles, Magazine Of the Korea Transport Institute, 62-67, 2013.
Crossref
15. Jang, S.J., Trend of software technology related to autonomous vehicle, Journal Of The Korean Institute Of Communication Sciences, 33(4), 27-33, 2016.
Crossref
16. Jeon, D.S. and Kim, J.H., Indoor Localization System Based on Magnetic Map for Autonomous Driving, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 1158-1159, 2016.
Crossref
17. Kang, S.J., Won, Y.H., Choi, J.W., Shin, Y.S. and Kim, J.W., Improvement of the law and system for revitalize the autonomous vehicle, Proceedings of Conference Of The Korea Technology Innovation Society, 335-355, 2016.
Crossref
18. Kim, C.K., Lim, K.I., Han, Y.M. and Kim, B.W., Implementation of Global and Local Planning for Autonomous Vehicle in Urban Environments, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 1374-1378, 2011.
Crossref
19. Kim, H.J., Lim, H.J. and Yang, J.H., Design and Evaluation of Alert Threshold for Takeover Request in Partial Autonomous Vehicles Considering Human, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 1337-1337, 2016.
Crossref
20. Kim, I.Y., Lee, Y.K., Yum, S.J. and Hwang, S.H., Environment Perception Using LiDAR Sensor Tilting Mechanism for Autonomous Vehicle, Proceedings of Conference Of The Korean Society of Mechanical Engineers, 3087-3091, 2013.
Crossref
21. Kim, J.H. and Hong, S.S., Position Recognition of Autonomous Vehicles via GPS and Vehicle Sensor Data Fusion, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 772-774, 2013.
Crossref
22. Kim, J.I., Study on Autonomous Vehicle’s Safety from Angles of Public Law, Journal Of The Korean Law Association, 16(4), 49-71, 2016.
Crossref
23. Kim, J.M., Lim, K.I. and Kim, J.H., Development of Path Planning System of Autonomous Vehicle for Auto-Parking, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 690-695, 2015.
Crossref
24. Kim, J.S., Kwon, T.H., Kim, J.E. and Jung, K.H., Fast Recognition Algorithm of Traffic Light Sign by Color and Shape Feature, Proceedings of Conference Of The Korean Society Of Broad Engineers, 200-203, 2016.
Crossref
25. Kim, J.S., Direction of Connected Car Development in the era of autonomous driving, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 147-156, 2014.
Crossref
26. Kim, K.H., Legislative Trends in the Autonomous Vehicle, Journal Of The Korean Society Of Automotive Engineers, 38(6), 33-37, 2016.
Crossref
27. Kim, M.J., Yoon, S.H. and Ji, Y.G., Exploring the User Experience for Autonomous Vehicle and the Role of Windshield Display: Based on Framework Approach, Proceedings of Conference Of The HCI Society of Korea, 321-326, 2016.
Crossref
Google Scholar
28. Kim, M.S., Standardization technology and task of autonomous driving and smart car, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 69-95, 2014.
Crossref
29. Kim, P.F. and Kim, J.H., The Research of Stable Path Access of Autonomous Vehicle, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 1085-1090, 2016.
Crossref
30. Kim, S.T., Legal Issues Related to Autonomous Vehicles, Journal of the Center for Law and Public Utilities, 9(2), 177-190, 2016.
Crossref
31. Kim, T.H. and Park, T.H., Calibration Method between Two 3D LIDARs for Autonomous Vehicle, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 827-827, 2016.
Crossref
32. Kim, W.G., Yi, K.S., Lee, K.I., Jung, G.H. and Kim, Y.W., Development of Autonomous Vehicle Control Algorithm Based on GPS and 6WD/6WS Test Vehicle Performance Verification, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 330-330, 2008.
Crossref
33. Kwak, Y.C., Lee, T.G. and Kang, Y.S., Development of Vision-based Body Slip Angle Estimation Method for Scale Car-based Autonomous Driving Environment, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 301-306, 2016.
Crossref
34. Kwak, Y.C., Lee, J.S., Lee, T.G. and Kang, Y.S., A Study of Real-Time Position Tracking System and Control of Scaled Car for Autonomous Driving Performance, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 1190-1190, 2016.
Crossref
35. Kwon, Y.J. and Lee, S.E., Liability Concerning Autonomous Car Accident, Journal Of The Korean Civil Law Association, (75), 449-495, 2016.
Crossref
36. Lee, B.Y., Trend and Prospect of Autonomous Vehicle Technology Development, Journal of the Korea Institute Of Communication Sciences, 33(4), 10-16, 2016.
Crossref
37. Lee, C.H., Study Concerning Civil Liability about Car Accident of Self-Driving Car, Journal of the Institute of Legal Studies Inha University, 19(4), 137-172, 2016.
Crossref
38. Lee, J.I., Kim, N.E. and Kim, J.W., The Effects of Feedback in an Automated Car, Proceedings of Conference Of The HCI Society of Korea, 669-672, 2017.
Crossref
39. Lee, J.K., Autonomous Vehicle : Ethics as a robot and legal problems, Proceedings of Conference Of The Korea Research Institute For Human Settlements, 416, 38-43, 2016.
Crossref
40. Lee, K.Y., Research and Development LIDAR for Autonomous Car, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 552-559, 2015.
Crossref
41. Lee, M.H., Ryu, S.H., Kim, J.K., Choi, Y.S. and Lee, Y.S., A Study on the Interior Driving Sound Enrichment Technique For Autonomous Electric Vehicles, Proceedings of Conference Of The Korea Institute Of Communication Sciences, 69-70, 2015.
Crossref
42. Lee, M.S., The Trend of International Safety Standard on Autonomous Vehicles, Journal Of The Korean Society Of Automotive Engineers, 38(6), 22-26, 2016.
Crossref
43. Lee, S.H., Jang, S.H. and Kim, J.H., The Development of a SLAM Algorithm for Global 2D Map using Unmanned Ground Vehicle, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 1928-1928, 2009.
Crossref
44. Lee, S.M., Shin, M.O. and Seo, S.W., Illumination Tolerant Traffic Sign Recognition Algorithm for Autonomous Vehicle, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 1489-1491, 2013.
Crossref
45. Lee, W.Y., Chae, A.B. and Heo, J.Y., Case Study on Cognitive Affordance Applied to Digital Center Fascia for Partial Autonomous Driving, Proceedings of Conference Of The HCI Society of Korea, 462-465, 2017.
Crossref
46. Min, K.I., Oh, J.S. and Kim, J.H., Unmanned Ground Vehicle's Speed Plan from Image Data Through Pedestrian Detection of Color Element, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 1016-1020, 2013.
Crossref
47. Myeong, J.G., Seo, K.J., Pak, J.Y., Lee, T.H., Lee, C.H., Park, C.H., Song, S.H. and Kim, S.G., Development of Autonomous Vehicle using Kinect Vision sensor and Indoor GPS, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 725-725, 2015.
Crossref
48. NTBS, Preliminary Report, Highway HWY16FH018, https://www.ntsb.gov/ (retrieved June 19, 2017).
Crossref
49. Oh, H.S., Choi, H.K. and Song, Y.S., V2X communication technology for collaborative autonomous driving, Journal Of The Korea Institute Of Communication Sciences, 33(4), 41-46, 2016.
Crossref
50. Oh, J.S., Lim, K.I. and Kim, J.H., A Research of Obstacle Detection and Path Planning for Lane Change of Autonomous Vehicle in Urban Environment, Journal Of The Institute of Control, Robotics and Systems, 21(2), 115-120, 2015.
Crossref
Google Scholar
51. Oh, J.W., Kim, T.U., Kim, I.H. and Yang, S.Y., A Study on Development of LIDAR Sensor Tilting Mechanism Considering the Driving Environment of Autonomous Vehicle, Proceedings of Conference Of The Korea Fluid Power Systems Society, 19-23, 2016.
Crossref
52. Park, K.C. and Jung, E.C., A Study on Driver Experience for Autonomous Vehicles in 2030, Proceedings of Conference Of The HCI Society of Korea, 376-379, 2017.
Crossref
53. Park, E.G., A study on the appearance of the self-driving car and amendments of the Motor car Insurance, Journal Of The Korean Law Association, 16(4), 105-133, 2016.
Crossref
54. Park, J.B., Park, J.T. and Kim, J.H., Longitudinal control system of autonomous car for consideration environment, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 489-489, 2015.
Crossref
55. Park, J.T., Park, J.B. and Kim, J.H., A study on establishment of database for autonomous-driving in downtown, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 549-549, 2015.
Crossref
Google Scholar
56. Park, T.J. and Cho, T.H., A study of crosswalk recognition for autonomous vehicles, Journal Of The Korean Institute of Intelligent Systems, 20(2), 422-424, 2010.
Crossref
57. Rha, W.Y., Standardization of Assisted Parking System for Advanced Driver Assist System, Journal Of The Korean Society of Automotive Engineers, 36(12), 31-36, 2014.
Crossref
58. Rha, W.Y., Standardization Trends of Autonomous Parking for Autonomous Driving Vehicles, Journal Of The Korean Society Of Automotive Engineers, 37(5), 68-73, 2015.
Crossref
59. Ryu, J.H. and Kim, J.H., A Lane-change Collsion Avoidance Algorithm for Autonomous Vehicles and HILS (Hardware-In-the-Loop Simulation) Test, Journal of The Korean Society Of Automotive Engineers, 7(5), 240-248, 1999.
Crossref
60. Shahroz, T., and Park, H.M., Parking Location Control Algorithm for Self-Driving Cars, Journal Of The Korean Information Science Society, 22(12), 654-662, 2016.
Crossref
Google Scholar
61. Shahroz, T., Choi, H.S., Wasiq, C.M. and Park, H.M., Automated Parking for Self-Driving Cars, Proceedings of Conference Of The Korean Information Science Society, 1552-1554, 2016.
Crossref
Google Scholar
62. Sung, M.H., Industry trends of Autonomous Vehicles, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 103-123, 2016.
Crossref
63. Woo, H.J., Park, S.B., Cho, K.H., Kim, B.W. and Kim, J.H., Research of the Optimal Local & Global Path Planning for Unmanned Ground Vehicle, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 988-992, 2009.
Crossref
64. Yang, J.H., Smart driving from HVI viewpoint, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 309-322, 2014.
Crossref
65. Yang, J.H., Kang, Y.S. and Nho, M.H., A Research of Road Marking Perception Method for Autonomous Vehicle using 2D Laser Sensor, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 832-832, 2016.
Crossref
66. Yi, J.Y. and Kim, J.I., Legal issues of autonomous vehicle operation, Journal Of the Chung-Ang Law Association, 17(2), 145-184, 2015.
Crossref
67. Yoo, S.J., Lee, D.H., Kim, H.W., Chu, K.Y. and Ko, B.C., Local Path Planning based on Collision Risk Estimation for Autonomous Driving, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 551-551, 2015.
Crossref
68. Yoon, D.J., Kim, J.H. and Kim, J.H., LiDAR Point Cloud Data Clustering and Classification for Obstacle Recognition of UGV, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 1339-1343, 2012.
Crossref
69. Yoon, J.I., Kwon, O.S. and Kim, J.H., A study on Fuzzy control system apply to the acceleration profile for the autonomous-driving in urban street, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 837-841, 2016.
Crossref
70. Yoon, J.S. and Kim, J.H., Method of Detection to Object by Using Monocular Vision of Autonomous Vehicle, Proceedings of Conference Of The Korean Society Of Automotive Engineers, 833-836, 2016.
Crossref
71. Yu, D.H. and Kang, K.P., Autonomous driving technology trend - Classification of technology level (SAE, NHTSA, VDA, BASt), Monthly KOTI Magazine on Transport, 54-59, 2016.
Crossref
72. Yu, S.B., Autonomous Vehicle Standardization Activities in ISO Meeting at Vancouver 2014, Journal Of The Korean Society Of Automotive Engineers, 36(12), 37-41, 2014.
Crossref
73. Yun, Y.W., Shin, J.K., Hong, Y.S. and Kang, B.D., Trend and Plan of Driver-Vehicle Interface Safety for Autonomous Vehicle, Proceedings of Conference of The Korean Society Of Automotive Engineers, 581-581, 2016.
Crossref
74. Yun, Y.W., Trend and Issue of Driver-Vehicle Interface for Autonomous Vehicle, The Korean Society Of Automotive Engineers, 38(2), 34-40, 2016.
Crossref
PIDS App ServiceClick here!