eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Jong Hyun Kim
, Chang Gi Lee
, Su Bin Kim
, Kyung Rok Moon
, Kwang Tae Jung
10.5143/JESK.2023.42.6.611 Epub 2024 January 07
Abstract
Objective: The aim of this study is to analyze and validate cervical spine range of motion (ROM) using a 3D depth camera.
Background: Measuring the ROM of the cervical spine is crucial for diagnosing and managing spine-related diseases. However, the conventional manual measurement method for cervical spine ROM has several issues, including measurement errors depending on the person conducting the measurement and the need for human involvement. Furthermore, existing motion capture systems are costly and require specialized technology. Therefore, this study proposes a method for measuring cervical spine ROM using a 3D depth camera and conducts a study to assess its accuracy.
Method: In this study, we defined a method for measuring cervical spine ROM using a human body model provided by a 3D depth camera manufacturer (Azure Kinect, MS, USA) and developed accompanying software. We verified the accuracy of three cervical spine movements: flexion-extension, left/right rotation, and left/right bending by comparing the measurements with a motion capture system (as reference data, Vicon Inc., UK) and manual measurements. We also proposed a data correction process to enhance accuracy.
Results: ① In the flexion-extension results, the raw data exhibited an accuracy of 67.54% (±6.6%) compared to the reference values. However, after applying the correction algorithm, the accuracy improved to 95.92% (±4.71%). ② In the rotation results, the raw data demonstrated an accuracy of 89.05% (±6.39%) compared to the reference values. As a result of analysis through data correction, the accuracy improved to 95.53% (±4.71%). ③ In the case of lateral bending, the raw data demonstrated an accuracy of 87.77% (±4.72%) compared to the reference values. As a result of analysis through data correction, the accuracy improved to 95.25% (±3.13%).
Conclusion: This study yielded consistent data when compared to reference data obtained from a motion capture system. The accuracy of the 3D depth camera was enhanced through the applied correction algorithm, surpassing the accuracy of manual measurements.
Application: Digital anthropometric technology based on 3D depth cameras has broad applications in clinical settings, exercise facilities, welfare centers, and homes. It is anticipated to play a significant role in the digital healthcare sector, in conjunction with webcam and smartphone camera technologies that are expected to develop in the future.
Keywords
Cervical spine 3D depth camera Range of motion Digital anthropometry Spinal function assessment
컴퓨터와 스마트 폰의 사용 영향으로 사람들의 경추 자세는 부정적인 방향으로 변화하고 있다. 부적절한 경추 자세는 장기적으로 다양한 경추 질환을 야기할 수 있고, 그러한 근거로 경추 관련 근골격계 질환자들이 매년 증가하고 있는 추세이다(Gu, 2022).
7개의 척추 뼈로 구성된 경추는 전반적인 척추 건강을 유지하는데 중추적인 역할을 하고 있다. 경추의 운동 범위(ROM: Range of Motion) 측정은 다양한 척추 건강 상태를 파악하고, 관리를 위한 매우 중요한 방법 중에 하나로 활용되어지고 있다(Graaf et al., 2020; Williams et al., 2010). 경추 ROM의 디지털 측정은 척추 건강 및 재활에 대한 상태를 수시로 파악하고, 추적 관리뿐만 아니라 건강 관리 및 재활운동을 맞춤형으로 제공할 수 있는 지표가 될 수 있다. 그러나 경추 ROM에 대한 전통적인 수동 측정 방식은 측정하는 사람 간 가변성에 대한 본질적인 한계를 가지고 있다(Williams et al., 2010; Dvir et al., 2006).
또한, 모션 캡처 시스템과 같은 마커 기반의 측정 방법은 데이터 정확도가 우수하지만, 마커 탈부착과 같은 과정들이 불편하고, 넓은 공간과 활용에 전문 지식이 필요한 문제점들이 있다(Yang and Jung, 2023; Yu et al., 2019). 이처럼 기존 측정 시스템 사용상의 불편을 이유로 마커 부착이 필요 없는 카메라인 웹캠과 3차원 깊이 카메라를 활용한 동작 분석 및 디지털 측정에 대한 연구가 활발하게 이루어지고 있다(Wang et al., 2022; Yu et al., 2020; Huber et al., 2015). 웹캠과 스마트폰 카메라, 3차원 깊이 카메라를 활용한 연구들은 대부분 정확도에 대한 한계를 갖고 있어, 정확도를 향상할 수 있는 필터링 기술, 분석 알고리즘에 대한 연구들이 주를 이루고 있다(Yang and Jung, 2023; Yunardi et al., 2023; Pusara et al., 2019; Krishnan et al., 2015).
또한, 모든 동작을 측정하는 것보다는 서비스에 필요한 정보를 목적으로 주요 지표가 되는 동작과 자세로 제한하여, 측정함으로써 정확도를 향상시키는 방법을 활용하고 있다. 그동안 이와 같은 측정 방식의 대상이 되었던 동작들은 주로 보행 분석 연구들이었다. 보행 분석은 계속하여 반복되는 동작으로 분석되는 연구로 선행 연구들을 기반으로 정확도를 개선할 수 있는 방안들을 찾기가 비교적 수월하며, 활용성이 높은 대상 동작이다. 또한 많은 선행 연구들과 데이터 비교와 검증을 통해 높은 정확도의 보행 측정 및 분석 기술을 개발할 수 있었다(Yunardi et al., 2023; Pusara et al., 2019; Saner et al., 2017).
기존의 경추 ROM에 대한 디지털 측정 방식에서는 센서 부착 및 전자 고니오미터 방식으로 측정되어 왔다(Williams et al., 2010). 하지만 본 연구에서는 경추 ROM을 측정하기 위하여, 마커나 센서가 없는 3차원 깊이 카메라 활용 기술을 개발하였다. 그리고 기존의 마커 부착 방식의 적외선 모션 캡처 시스템을 활용한 방법과 비교 검증하였고, 정확도를 개선할 수 있는 방안, 데이터 후처리 방안을 제안하였다.
본 연구에서는 척추 및 경추의 건강 상태를 파악하기 위하여, 3차원 깊이 카메라(3D depth camera, (Azure Kinect, MS. USA))에서 제공하는 인체 모델을 활용하여 경추 ROM의 3가지 동작(① 굴곡-신전, ② 좌 · 우 회전, ③ 좌 · 우 굽힘)을 디지털 측정할 수 있는 기술을 개발하였다.
그리고 본 연구에서 개발된 3차원 깊이 카메라를 활용한 측정/분석 기술과 기존의 측정 방식인 마커 기반 모션 캡처 시스템(Vicon Inc., UK), 각도기를 활용한 수동 측정 방식을 비교평가 함으로써 본 연구에서 개발한 방법의 타당성을 검증하였다.
2.1 Definition of cervical spine motion analysis algorithm based on human body model
본 연구에서는 Azure Kinect 제조사인 Microsoft에서 제공하는 소프트웨어 개발 키트(SDK: Software Development Kit)의 신체 추적 결과를 활용하여 경추 ROM 3가지 동작을 측정할 수 있는 알고리즘을 정의하였다. Azure Kinect는 근적외선(NIR: Near InfraRed)을 투사하여, 빛과 빛의 경계 간 거리를 계측하고(X, Y 좌표 데이터), IR을 투사한 ToF (Time of Flight)를 통해 깊이 데이터(X 좌표 값)를 계측한다(Microsoft, 2023). 이와 같은 Azure Kinect의 측정 원리는 X 좌표 데이터의 정확성을 담보하기 어려워, 이에 대한 계측 값의 보정이 필요하다.
Azure Kinect SDK.에서는 총 32개의 관절에 대한 위치(Node) 데이터를 제공하고 있으며, 본 연구에서는 5개의 관절 위치 데이터(① Ear right, ② Ear left, ③ Neck, ④ Spine chest, ⑤ Shoulder right, ⑥ Shoulder left)를 활용하여 경추 ROM 측정하고 분석할 수 있는 알고리즘을 정의하였다.
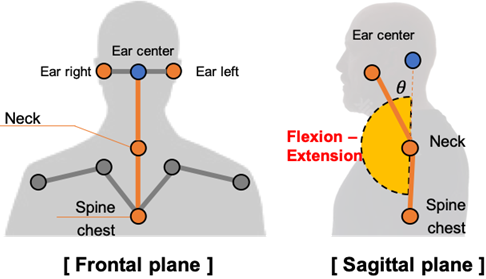
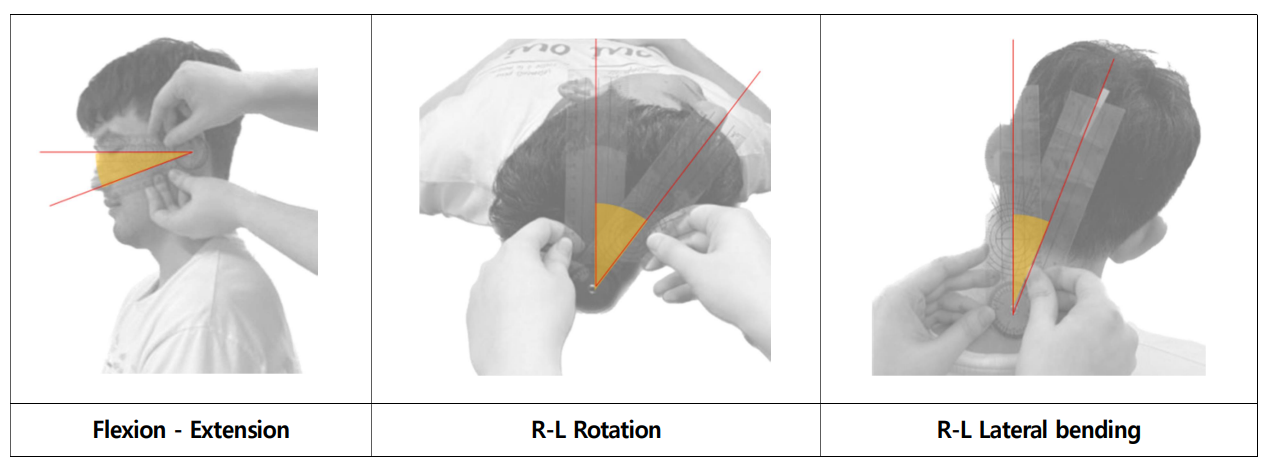
경추 굴곡-신전 동작(Flexion – Extension of cervical)은 Ear right, Ear left, Neck, Spine chest 네 개의 노드를 활용하여, 측정 알고리즘을 정의하였다. 먼저 Ear left와 Ear right의 중간에 Ear center를 생성하였다. 그리고 Ear center와 Neck, Spine chest가 일직선이 되는 선을 0도로 하여, Sagittal plane에서 Ear center가 움직이는 범위를 통해 경추 굴곡-신전 동작의 ROM을 측정할 수 있도록 정의하였다(Figure 1).
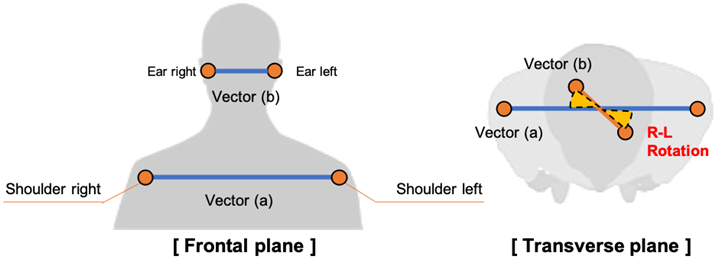
경추 회전 동작(Rotation of cervical)은 Ear right, Ear left, Shoulder right, Shoulder left 네 개의 노드를 활용하여 측정 알고리즘을 정의하였다. 첫 번째로 Shoulder right-left의 Vector (a) 정의하였고, 두 번째로 Ear left-right의 Vector (b) 정의하였다. 그리고 세 번째로 Transverse plane에서 Vector (a)와 (b) 사이의 각도 변화량을 통해 경추 회전 ROM을 측정할 수 있도록 정의하였다(Figure 2).
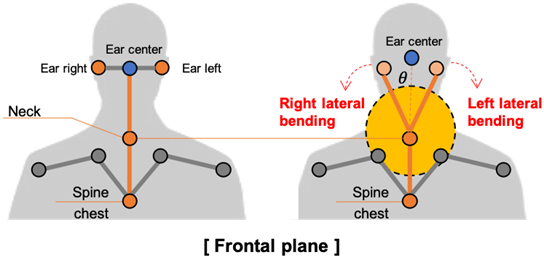
경추 측면 굽힘 동작(Lateral bending of cervical)은 Ear right, Ear left, Neck, Spine chest 네 개의 노드를 활용하여, 측정 알고리즘을 정의하였다. 먼저 Ear left와 Ear right의 중간에 Ear center라는 Node를 생성하였다. 그리고 Ear center와 Neck, Spine chest가 일직선이 되는 선을 0도로 하여, Frontal plane에서 Ear center가 움직이는 범위를 통해 경추 좌 · 우 굽힘 동작의 ROM을 측정할 수 있도록 정의하였다(Figure 3).
2.2 Measurement of cervical spine ROM using 3 methods
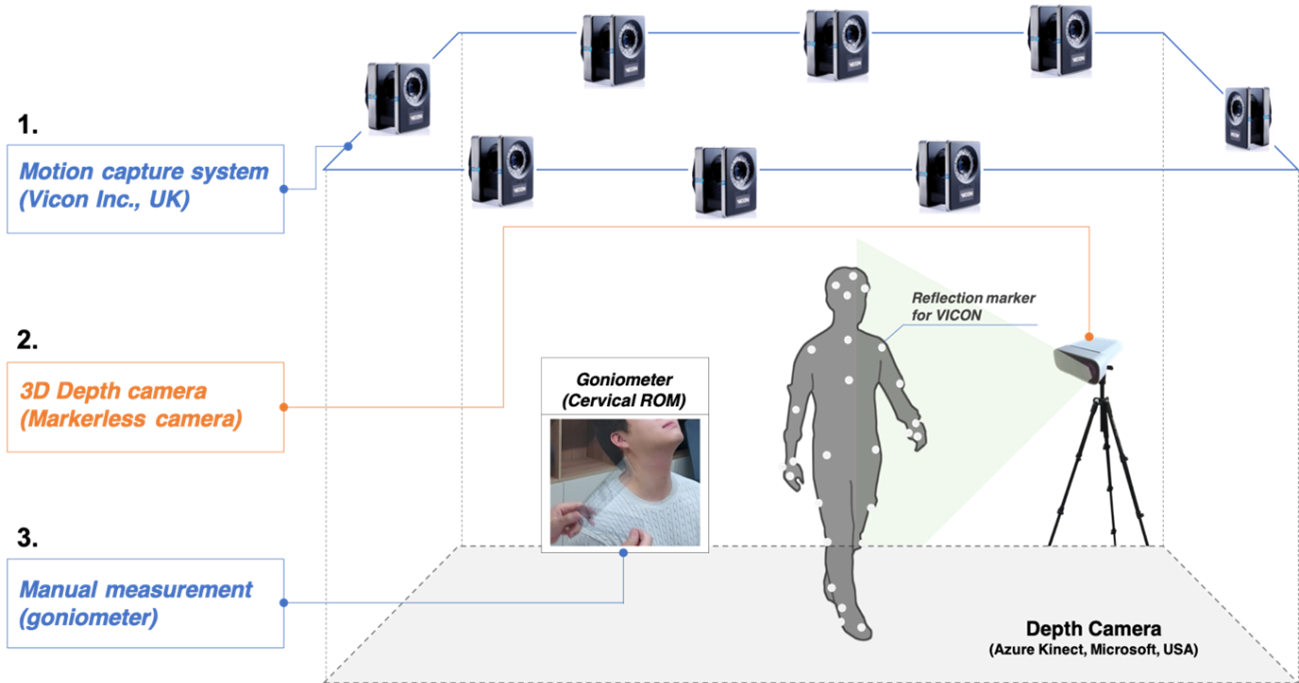
3차원 깊이 카메라의 경추 ROM 측정에 대한 검증과 알고리즘 개선을 위하여, 1) 모션 캡처 시스템(Motion capture system), 2) 3차원 깊이 카메라(3D depth camera (Azure Kinect)), 3) 각도계를 이용한 수동 측정 방식(Manual measurement using goniometer)의 3가지 방식으로 경추 ROM을 측정하였다(Figure 4).
실험에는 총 16명(남자: 14명, 여자 2명, 신장: 174.7±7.9cm), 나이(26.2±2.2세)이 참여하였다. 참여자들은 경추 및 척추 관련 질환에 대한 병력이 없으며, IRB 승인 문서에 따라 실험에 대한 설명 그리고 참여 동의 후에 실험을 참여하였다.
경추 동작의 측정은 굴곡-신전, 좌 · 우 회전, 좌 · 우 굽힘의 순서로 측정되었다. 모션 캡처와 3차원 깊이 카메라를 활용한 측정은 동시에 수행되었으며, 3번을 반복 수행하였고, 측정 중간에 수동 측정을 수행하였다(Cánovas-Ambit et al., 2021), (Figure 5). 모션 캡처와 수동 측정 간에 동작의 동일성을 확보하기 위하여, 실험 전에 동작의 범위와 최대 동작 범위에 대하여 설명하였고, 2~3 번의 사전 연습을 수행하였다. 마커를 부착한 모션 캡처에는 Plug in gait full body model marker set을 사용하였고, Nexus 2.15 버전을 통해 Neck joint angle 데이터를 분석하였다.
3가지 방식에 대한 데이터 비교 및 검증은 마커 부착 방식의 모션 캡처 시스템을 기준으로 수행되었다. 평균 데이터 오차를 기반으로 정확도를 계산하는 방식(MAE: Mean absolute error)으로 정확도를 분석하였다(Chai and Draxler, 2014). 3가지 측정 방식 따른 종속변수와 보정 알고리즘을 통해 개선된 3차원 깊이 카메라 데이터를 추가한 4가지 조건에 의한 종속변수들에 대한 유의성 검정을 위하여, 일원배치분산분석(One-Way ANOVA)을 수행하였다. 그리고 4가지 측정 방식과 분석 조건에 따른 사후 검정(Tukey HSD)을 수행하였다. 유의수준은 0.05로 설정하였다.
2.3 Method for improving analysis algorithm of cervical spine ROM
3차원 깊이 카메라를 활용한 디지털 경추 동작 측정은 깊이 값(X 좌표)을 계측하는 ToF (Time of Flight) 방식의 한계로 측정 오차가 발생하고, 이에 대한 보정이 필요하다. 일관된 측정 오차로 인한 절대 합치도(Absolute agreement)가 불일치하는 것으로 모션 캡처 시스템 데이터와 비교한 3차원 깊이 카메라 결과 값의 비율을 보정 계수로 정의하였다. 마커 부착 방식의 모션 캡처 시스템과 비교하여, 도출된 보정 계수(a=굴곡-신전(48.16), 회전(85.87), 굽힘(69.72))를 활용하여, 정확도를 개선하였다. 보정 전에 3차원 깊이 카메라와 모션 캡처 시스템의 측정 값의 급내 상관 계수 분석(ICC: Intraclass Correlation Coefficient)을 통한 두 가지 데이터 간 경향성 일치도(Consistency)의 강한 상관 관계(ICC > 0.6, *p < 0.05) 여부를 확인하였다(Koo and Li, 2016). 보정한 데이터(100 × 측정 데이터 / a (보정 계수))의 정확도를 분석하고, 정확도의 개선 정도에 대한 통계분석을 수행하였다.
Results 및 Discussion의 내용 기술에서 4가지 측정 조건에 대한 약어를 다음과 같이 정의 하였다. MC(Motion capture system에 의한 측정), DC(3D Depth camera에 의한 측정), MM(Manual measurement, 수동 측정), DCC(Depth camera correction: 깊이 카메라 측정 보정 값).
급내 상관 계수 분석을 통해 MC와 DC 간의 경향성 일치도(Consistency)는 3가지 동작 모두에 강한 상관 관계 (ICC > 0.6)를 나타냈다. 굴곡-신전 ROM 측정 결과에서는 MC와 DC 간의 ICC = 0.639 (p = 0.029), 좌 · 우 회전 ROM에서는 ICC = 0.773 (p = 0.003), 좌 · 우 굽힘 ROM에서는 ICC = 0.833 (p = 0.001)으로 나타났다. 이와 같은 경향성 일치도를 근거로 보정 계수 의한 DCC 결과를 분석하였다.
3.1 Result of cervical spine ROM
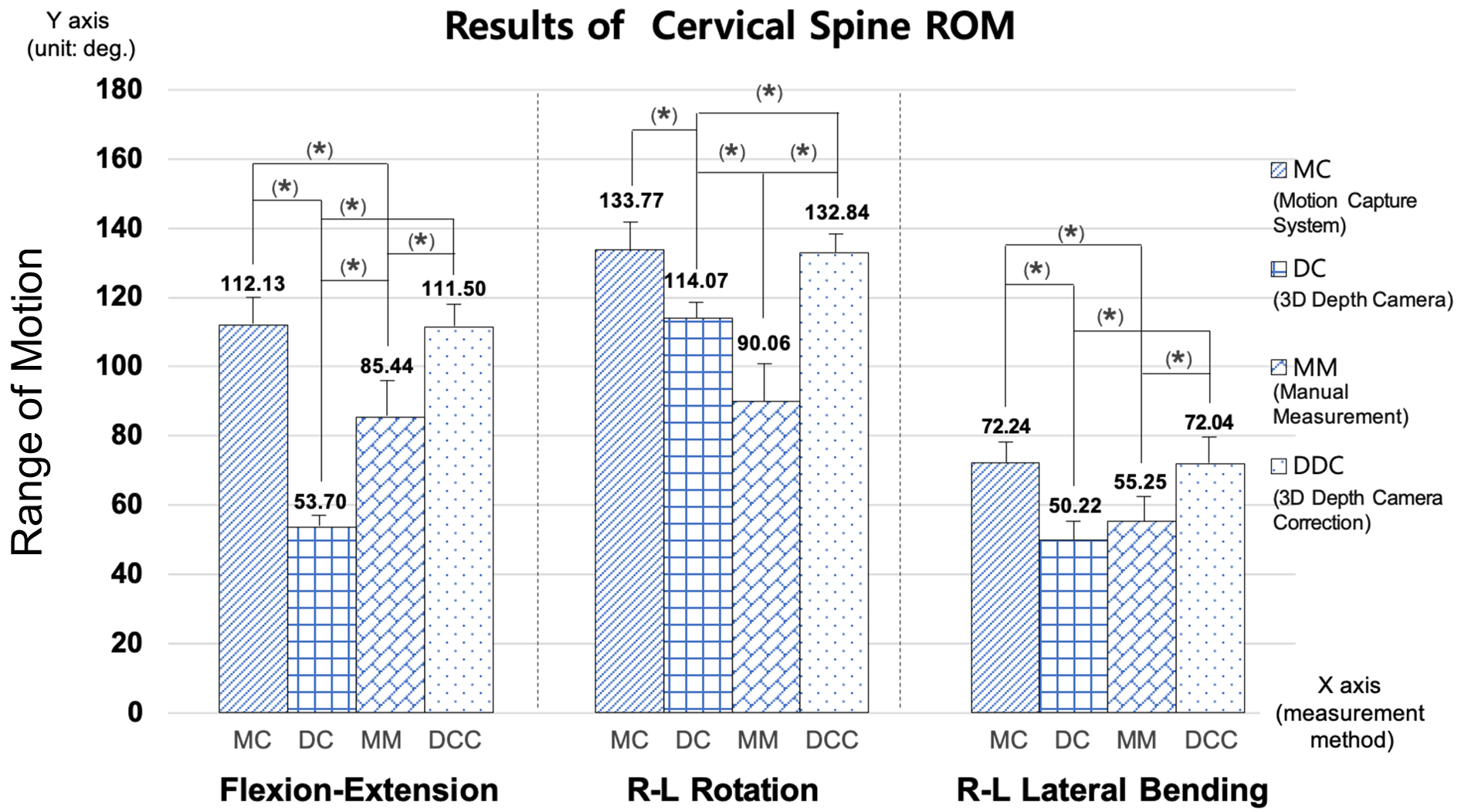
굴곡-신전(Flexion-Extension) ROM 결과에서 MC ROM은 112.13(±15.12)°, DC ROM은 53.70(±6.07)°, MM ROM은 85.44(±20.25)°, 도출된 보정 계수 48.16에 의한 DCC ROM은 110.50(±12.60)°로 나타났다. 분산 분석 결과 그 차이는 유의수준 0.05 (p = 0.00)에서 통계적으로 유의하게 나타났다. 사후 검정(Post hoc test)에서는 MC와 DCC를 제외한 모든 관계에서 유의한 차이(p < 0.05)가 나타났다. MC와 DC (p = 0.00), MC와 MM (p = 0.00), DC-MM (p = 0.00), DC-DCC (p = 0.00), MM-DCC (p = 0.00) 간의 유의성이 나타났다(Figure 6).
좌 · 우 회전(R-L Rotation) ROM 결과에서 MC ROM은 133.77(±16.65)°, DC ROM은 114.07(±8.97)°, MM ROM은 90.06(±22.03)°, 도출된 보정 계수 85.87에 의한 DCC ROM은 132.84(±10.44)°로 나타났다. 분산 분석 결과 그 차이는 유의수준 0.05 (p = 0.00)에서 통계적으로 유의하게 나타났다. 사후 검정(Post hoc test)에서는 수동 측정과는 나머지 조건들이 유의한 차이가 있는 결과가 나타났다. MC와 MM (p = 0.00), DC와 MM (p = 0.00) 간의 유의성이 나타났다(Figure 6).
좌 · 우 굽힘(R-L Lateral bending) ROM 결과에서 MC ROM은 72.2(±11.93)°, DC ROM은 50.22(±10.44)°, MM ROM은 55.25(±14.38)°, 도출된 보정 계수 69.72에 의해 보정된 DCC ROM은 72.04(±14.98)°로 나타났다. 분산 분석 결과 그 차이는 유의수준 0.05 (p = 0.00)에서 통계적으로 유의하게 나타났다. 사후 검정(Post hoc test)에서는 MC와 DC (p = 0.00), MC와 MM (p = 0.003), DC-DCC (p = 0.00), MM-DCC (p = 0.003) 간의 유의한 차이(p < 0.05)가 나타났다(Figure 6).
3.2 Results of the cervical spine ROM accuracy
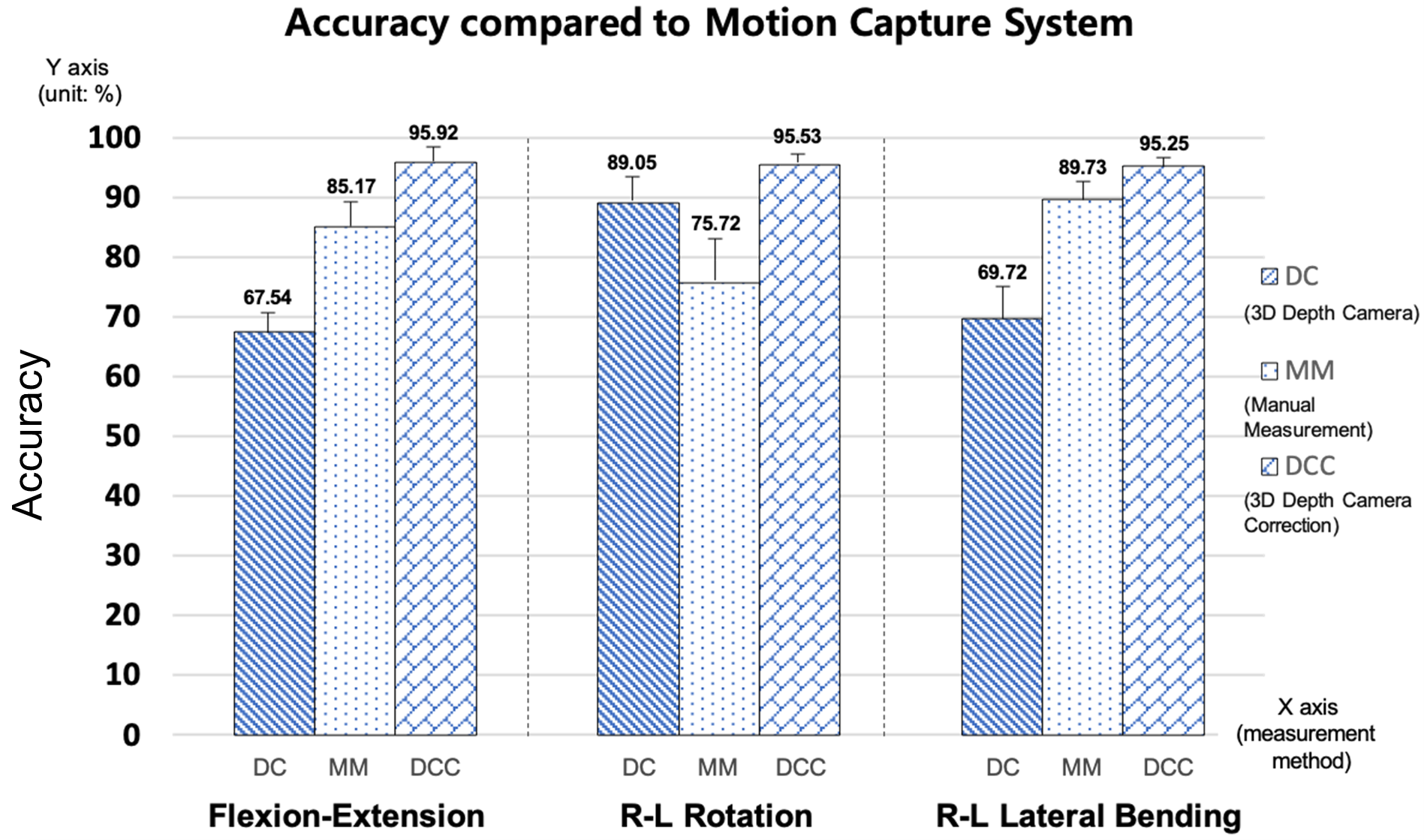
굴곡-신전(Flexion-Extension) ROM 정확도 결과에서 MC ROM 기준 DC ROM의 정확도는 67.54(±6.6)%로 MM ROM 정확도 85.17(±8.14)% 보다 낮게 나타났지만, 보정 계수(48.16)를 적용한 DCC ROM의 정확도는 95.92(±4.71)%로 개선된 결과를 나타냈다. 분산 분석 결과 그 차이는 유의수준 0.05 (p = 0.00)에서 통계적으로 유의하게 나타났다(Figure 7).
좌 · 우 회전(R-L Rotation) ROM 정확도 결과에서 MC ROM 기준 DC ROM의 정확도는 89.05(±6.39)%로 MM ROM 정확도 75.72(±11.31)% 보다 높게 나타났으며, 보정 계수(85.87)를 적용한 DCC ROM의 정확도는 95.53(±4.71)%로 개선된 결과를 나타냈다. 분산 분석 결과 그 차이는 유의수준 0.05 (p = 0.00)에서 통계적으로 유의하게 나타났다(Figure 7).
좌 · 우 굽힘(R-L Lateral bending) ROM 정확도 결과에서 MC ROM 기준 DC ROM의 정확도는 69.72(±10.69)%로 MM ROM 정확도 89.73(±6.02)% 보다 낮게 나타났지만, 보정 계수(69.72)를 적용한 DCC ROM의 정확도는 95.25(±3.13)%로 개선된 결과를 나타냈다. 분산 분석 결과 그 차이는 유의수준 0.05 (p = 0.00)에서 통계적으로 유의하게 나타났다(Figure 7).
본 연구에서는 3차원 깊이 카메라의 경추 ROM 측정 정확도를 검증하고, 개선하기 위하여 기존의 마커를 부착하고 정확한 데이터를 얻기 위해 활용되는 MC를 기준으로 DCC를 도출하였다. MC의 데이터는 신체 주요 관절의 위치를 파악하여, 관련 관절운동에 대한 데이터를 획득하기 위한 목적으로 개발된 분석 소프트웨어를 통해 분석된 값으로 이미 신뢰도를 검증 받았다. 그러나 DC는 게임, 어플리케이션 등에 적용하기 위해 제공되는 데이터를 기반으로 계측된 값으로 측정 관절의 위치와 정의, 개념, 정확도 측면에서 MC와는 다르다. 따라서 측정 데이터의 검증과 신뢰성 확보를 위해서 MC 기반 DCC 값을 도출하는 과정을 수행하였다.
3가지 방식으로 수행된 평가에서 보정 전 굴곡-신전 동작에서 DC 정확도는 67.54(±6.6)%로 나타났고, MM 정확도는 85.17(±8.14)% 나타났다. DC 정확도는 오히려 MM 보다 낮았고, 측정 값은 모든 값들이 MC 보다 약 30~50% 낮게 나타났다. 이는 깊이 축(X 좌표 값)에 대한 데이터가 정확하게 측정되지 않은 결과이다. 그러나 ICC 분석을 통해 MC와 DC의 경향성 일치도가 강하게 나타난 것을 확인하였다. 또한 측정된 ROM에서 3가지 측정 방식의 표준편차를 비교하면, DC의 측정 값이 나머지 MM의 측정 값에 비해 일관성이 있는 것으로 판단된다. 따라서 본 연구에서는 일관된 경향성으로 낮게 측정된 값들을 보정하기 위한 보정 계수를 도출하였다. 굴곡-신전에서는 보정 계수가 48.16으로 도출되어, 16명의 데이터에 동일한 계수를 적용한 데이터 변환 과정을 수행하였다. 이와 같은 보정 결과로 굴곡-신전의 DCC ROM 평균은 111.50(±12.60)°, MC ROM 평균 112.13(±15.12)°와 거의 동일한 결과를 나타냈다. 두 가지 값에 대한 사후 검정 결과(Post hoc test)에서도 유의한 차이가 나타나지 않았다. 또한 각 데이터 별 정확도를 계산하여 평균으로 도출된 정확도에서도 굴곡-신전에 대한 정확도 결과는 DC 정확도 DCC 정확도 67.54(±6.6)%에서 95.92(±4.71)%로 개선된 결과를 나타났다.
좌 · 우 회전에 대한 DC의 정확도는 89.05(±6.39)%로 나타났고, MM 정확도 75.72(±11.31)% 보다 낮게 나타났다. 측정 값들은 MC 보다 약 10~15% 낮게 나타났다. 따라서 좌 · 우 굽힘에서도 굴곡-신전과 마찬가지로 보정 계수 85.87를 16명의 데이터에 동일하게 적용하여 데이터 보정을 수행하였다. 이와 같은 보정 결과로 DCC 평균은 132.84(±10.44)°, MC 평균 133.77(±16.65)°와 거의 동일한 결과를 나타냈다. 두 가지 값에 대한 사후 검정 결과(Post hoc test)에서도 유의한 차이가 나타나지 않았다. 또한 각 데이터 별 정확도를 계산하여 평균으로 도출된 정확도 결과에서도 DCC 정확도는 DC 정확도 89.05(±6.39)%에서 95.53(±4.71)%로 개선된 결과를 나타냈다.
좌 · 우 굽힘에 대한DC의 정확도는 87.77(±±4.72)%로 나타났고, MM 정확도 89.73(±6.02)% 보다 낮게 나타났다. 측정 값들은 MC 보다 약 20~40% 낮게 나타났다. 따라서 좌 · 우 굽힘에서도 굴곡-신전과 마찬가지로 보정 계수 69.72를 16명의 데이터에 동일하게 적용하여 데이터 보정을 수행하였다. 이와 같은 보정 결과로 DCC 평균은 72.04(±14.98)°, MC 평균 72.24(±11.93)°와 거의 동일한 결과를 나타냈다. 두 가지 값에 대한 사후 검정 결과(Post hoc test)에서도 유의한 차이가 나타나지 않았다. 또한 각 데이터 별 정확도를 계산하여 평균으로 도출된 정확도 결과에서도 DCC 정확도는 DC 정확도 87.77(±4.72)%에서 95.25(±3.13)%로 개선된 결과를 나타냈다.
세 가지 동작의 결과를 종합해서 해석하면, MC와 비교한 DC, MM은 절대적인 ROM과 정확도 차이에 의해 통계적으로 유의한 차이가 나타났으며, 사후 검정에서 DCC는 MC와는 유의한 차이가 나타나지 않았다. 이와 같은 결과로 임상 현장에서 주로 사용되어왔던 MM의 문제점을 확인할 수 있었고, 본 연구에서 제안하는 3차원 깊이 카메라에 의한 인체 측정 방식인 DCC의 일관성과 정확도를 MC와 비교하여 검증하였다.
본 연구에서 개발하고 검증을 통해 정확도를 향상하는 절차와 방법은 디지털 경추 동작에 대한 측정 뿐만 아니라 정확한 기존의 방식을 기준으로 디지털 인체 측정에 대한 개발 기술을 검증하고, 보정하는 데이터 후처리 과정에 모두 적용 가능한 방법이다. 또한 사용자의 편의를 위해 절차가 간편한 기술에 적용 가능하다. 그리고 일관성 있는 데이터를 확보한다면, 정확도를 향상 시킬 수 있는 대안으로 활용될 수 있을 것으로 사료된다.
본 연구에서는 3차원 깊이 카메라를 활용하여 경추 동작을 디지털화된 기술로 측정하는 기술을 개발하였고, 이 방법을 기존에 주로 활용되었던 마커 기반 모션 캡처 시스템에 의한 측정 방법과 실제 임상 현장에서 널리 쓰여 왔던 수동 측정 방법을 비교 검증하였다. 검증 연구를 통해 그동안 임상 현장에서 주로 사용되어 왔던 수동 측정 방식의 문제점을 확인하였고, 본 연구에서 제안하는 디지털 인체 측정 기술의 정확도와 일관성을 확인하였다.
현대인들의 생활습관과 잘못된 자세가 원인이 되어, 해마다 척추 관련 질환자들은 증가하고 있고, 정량화된 관리와 맞춤형 서비스들을 필요로 하고 있다. 경추의 가동 범위는 다양한 척추 질환과 건강상태를 나타내는 중요한 지표이다. 또한 경추 디스크, 거북목증후군, VDT 증후군, 강직성 척추염 등의 진단과 재활 상태를 파악할 수 있는 지표이다(Graaf et al., 2020; Williams et al., 2010).
따라서 본 연구에서 3차원 깊이 카메라 기반의 디지털 기술을 활용하여, 마커를 부착하지 않고, 간편하게 경추 가동 범위를 측정할 수 있는 기술을 고안하고, 기존의 정확한 방식과 비교 검증을 통해 분석 알고리즘을 개선하였다. 이와 같은 경추 가동 범위를 측정할 수 있는 디지털 인체 측정 기술은 임상 현장, 운동시설, 복지관, 재가 등에서 널리 활용될 수 있으며, 향후 개발되는 웹캠과 스마트폰 카메라 기술에 연계되어 디지털 헬스케어 분야에서 활용이 확장될 수 있는 기술이다.
References
1. Cánovas-Ambit, G., García-Vidal, J.A., Martín-San Agustín, R., Dalla-Vecchia, A.A., Sánchez-Barbadora, M. and Medina-Mirapeix, F., Validity and reliability of Veloflex to measure active cervical range of motion in asymptomatic and symptomatic subjects, PeerJ, 9, e11228, 2021.
2. Chai, T. and Draxler, R.R., Root mean square error (RMSE) or mean absolute error (MAE)? – Arguments against avoiding RMSE in the literature, Geoscientific Model Development, 7(3), 1247-1250, 2014.
Google Scholar
3. Dvir, Z., Gal-Eshel, N., Shamir, B., Prushansky, T., Pevzner, E. and Peretz, C., Cervical Motion in Patients With Chronic Disorders of the Cervical Spine: A Reproducibility Study, SPINE, 31(13), E394-E399, 2006.
Google Scholar
4. Graaf, M.T., Thoomes, E., Fernandez-de-las-Penas, C., Plaza-Manzano, G. and Clelande, J., Normative values of cervical range of motion for both children and adults: A systematic review, Musculoskeletal Science and Practice, 49, 2020.
Google Scholar
5. Gu, B.E., Modern people with their heads down, their neck health is at risk, Human Resources Development Service, 2022. https://webzine.hrdkorea.or.kr/section/webzine/view?id=11546#
6. Huber, M.E., Seitz, A.L., Leeser, M. and Sternad, D., Validity and reliability of Kinect skeleton for measuring shoulder joint angles: a feasibility study, Physiotherapy, 101, 389-393, 2015.
Google Scholar
7. Koo, T.K. and Li, M.Y., A Guideline of Selecting and Reporting Intraclass Correlation Coefficients for Reliability Research, Journal of Chiropractic Medicine, 15(2), 155-163, 2016. doi:10.1016/j.jcm.2016.02.012. PMC 4913118. PMID 27330520.
8. Krishnan, C., Washabaugh E.P. and Seetharaman, Y., A low cost real-time motion tracking approach using webcam technology, Journal of Biomechanics, 48(3), 544-548, 2015.
Google Scholar
9. Microsoft, Build an Azure Kinect body tracking application, Azure Kinect DK documentation, 2023. https://learn.microsoft.com/ en-us/azure/kinect-dk/build-first-body-app
10. Pusara, A., Heamawatanachai, S., Sinsurin, K. and Jorrakate, C., Reliability of a low-cost webcam recording system for three-dimensional lower limb gait analysis, International Biomechanics, 6(1), 85-92, 2019.
Google Scholar
11. Saner, R., Washabaugh, E. and Krishnan, C., Reliable sagittal plane kinematic gait assessments are feasible using low-cost webcam technology, Gait & Posture, 56, 19-23, 2017.
Google Scholar
12. Wang, X.M., Smith, D.T. and Zhu, Q., A webcam-based machine learning approach for the three-dimensional range of motion evaluation, SportRxiv, 2022. https://doi.org/10.51224/SRXIV.219
13. Williams, M.A., McCarthy, C.J., Chorti, A., Cooke, M.W. and Gates, S., A Systematic Review of Reliability and Validity Studies of Methods for Measuring Active and Passive Cervical Range of Motion, Journal of Manipulative and Physiological Therapeutics, 33(2), 138-155, 2010.
Google Scholar
14. Yang, D.Y. and Jung, E.S., Comparison of Different Types of Filters for a Webcam-based 3D Gait Analysis System, Journal of the Ergonomics Society of Korea, 42(4), 401-415, 2023.
15. Yu, R., Shiratori, T. and Joo, H., FrankMocap: Fast Monocular 3D Hand and Body Motion Capture by Regression and Integration, Computer Vision and Pattern Recognition, 2020. https://doi.org/10.48550/arXiv.2008.08324
16. Yu, Y., Li, H., Yang, X., Kong, L., Luo, X. and Wong, A.Y.L., An automatic and non-invasive physical fatigue assessment method for construction workers. Automation in Construction, 103, 1-12, 2019. https://doi.org/10.1016/j.autcon.2019.02.020
Google Scholar
17. Yunardi, R.T., Sardjono, T.A. and Mardiyanto, R., Motion Capture System based on RGB Camera for Human Walking Recognition using Marker-based and Markerless for Kinematics of Gait, 2023 IEEE 13th Symposium on Computer Applications & Industrial Electronics (ISCAIE), 2023. https://doi.org/10.1109/ISCAIE57739.2023.10164935
PIDS App ServiceClick here!