eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Yong Deok Yun
, Rohae Myung
10.5143/JESK.2019.38.2.61 Epub 2019 May 01
Abstract
Objective: The aim of this study is to investigate the effects of Takeover Request Lead Time (TORlt) to Driver Workload in conditionally autonomous driving (CAD).
Background: Takeover request (TOR) is important issue in conditionally autonomous driving. A human driver must be ready to take control of the vehicle when TOR is given. However, driver could be underload when autonomous driving lasts for a long time or be overload if NDRT (Non-driving related task) is highly demanding or TOR appears suddenly. Therefore, investigating driver workload in takeover situation is essential. This paper focuses on effects of TORlt to driver workload.
Method: To investigate effects of TORlt to driver workload in CAD, experiment were conducted on the takeover situation through a driving simulator. Experiment were conducted on 7 levels of TORlt (3, 7, 10, 15, 30, 45, 60s) and ghost session. Also, the participants performed NDRT to assume CAD. During the experiments, subjective and physiological workload was measured by DALI (Driving Activity Load Index) and respiration rate respectively.
Results: TORlt has a large effect on driver workload. When TORlt was 3 seconds, the subjective and objective workload was the highest. As TORlt increases, both of workload decreases. For subjective workload, there was a slight increase in workload when TORlt was long, but it was not statistically significant. For physiological workload, the workload continued to decline, but there was no statistically significant difference for longer TORlt In addition, there was a significant positive correlation between subjective workload and physiological workload. Therefore, subjective workload can be replaced by physiological workload in takeover situation.
Conclusion: As TORlt increases, the driver workload decreases, but the difference is not significant if TORlt was long. Also, subjective workload measurement could be replaced by measuring physiological signals.
Application: Through this paper, it has been found that physiological measure could be an alternative for measuring workload in autonomous vehicle. Therefore, in autonomous vehicles, sensors that measure physiological signals will be installed to determine the driver's workload.
Keywords
Autonomous driving Conditionally Autonomous driving (CAD) Takeover Request (TOR) Takeover Request lead time (TORlt) Workload Subjective rating Physiological measurement
지난 수십 년 동안 자율주행 시스템을 개발하려는 시도가 많이 있었다. 최근에는 부분 자율주행 시스템을 장착한 자동차가 시장에 나오고 있으며, 완전 자율주행 자동차에 대한 개발도 활발하게 이루어지고 있다. SAE (SAE International, 2016)에 따르면 자율주행 시스템은 5가지 수준으로 분류할 수 있으며 이는 Table 1과 같다. 특히 최근에는 부분 자동화(SAE 2단계)와 조건부 자동화(SAE 3단계)가 적용되는 자율주행 자동차에 대한 개발이 많이 이루어지고 있으며 실제 상용화도 진행되고 있다.
|
SAE level |
Name |
Narrative description |
|
0 |
No automation |
The full-time performance
by the human driver |
|
1 |
Driver assistance |
There is a driver assistance system to help with driving, but most
of the driving is done by humans |
|
2 |
Partial automation |
Driver assistance systems are applied and the system is running
but monitoring and fallback performance is essential |
|
3 |
Conditional automation |
It is not necessary to monitor the driving situation because the
autonomous driving system is responsible for most of the traveling, but
fallback performance is essential |
|
4 |
High automation |
Even if the autonomous drive system is in charge of the driving
and the driver can refuses the control change request |
|
5 |
Full automation |
Autonomous driving in all
situations |
부분 자율주행 시스템(Partial Automation)이나 조건부 자율주행 시스템(Conditional Automation)에서, 인간 운전자는 자율주행 시스템이 주행할 수 없는 상황에 대해 개입하여 운전을 해야 한다. 이러한 상황을 제어권 전환(Takeover)이라고 하며, 제어권 전환 상황을 요청하는 것을 제어권 전환 알림(Takeover Request, TOR)이라고 한다(Borojeni et al., 2017; Eriksson and Stanton, 2017).
제어권 전환 상황에서는 운전자와 자율주행 시스템 사이의 상호작용이 필요하기 때문에 인간공학적 연구가 많이 진행됐다(Gold et al., 2016; Körber et al., 2018; Payre et al., 2016). 특히 상황 인지에 대한 회복(De Winter et al., 2014; van den Beukel and van der Voort, 2013)과 작업부하(Greenlee et al., 2018; Hajek et al., 2013)에 대한 연구가 많이 진행됐다. 본 논문에서는 작업부하에 초점을 맞춰서 연구를 진행했다. 자율주행 시스템의 본 목적은 인간의 작업부하를 낮추고 사고를 줄이는데 있으나 제어권 전환 상황에서 운전자의 작업부하가 너무 높아지거나 낮아지게 되면 사고가 발생할 수 있다(Brookhuis and de Waard, 2001; Endsley and Kiris, 1995; Saffarian et al., 2012). 자율주행 상황에서 작업부하가 너무 낮아지거나(underload) 제어권 전환 알림을 인식하고 반응하는 과정에서 작업부하가 급격하게 상승할 경우(overload) 제어권 전환 수행도가 떨어져 사고가 발생할 수 있다. 따라서 운전자 작업부하 평가는 제어권 전환 연구에서 필수적인 연구다.
제어권 전환 상황에서 운전자의 수행도나 작업부하에 영향을 미치는 요소들은 개인적 특성, 환경적 특성, 차량적 특성으로 다양하게 존재하며 이에 관한 연구들이 활발히 이루어졌다. 먼저 개인적 특성은 개인의 위험 부담 정도, 연령, 운전자의 인지부하, 운전자 피로 등이 있다. Zeeb et al. (2015)는 제어권 전환 상황에서 운전자를 위험 부담 정도에 따라 세 그룹으로 나누고 아이트래킹을 통해 운전 수행도를 조사했다. 또한, Körber et al. (2016)은 운전자 연령이 제어권 전환 수행도에 미치는 영향을 조사했다. 샘플을 젊은 그룹(25~35세)과 나이가 많은 그룹(50~70세)으로 나누어 비교했지만 두 연령 집단 간에 제어권 전환 수행도에 유의한 차이가 없었다. Feldhütter et al. (2017)는 제어권 전환 알림 발생 이전에 운전자 인지부하가 수행도에 미치는 영향을 조사했다. 인지부하는 NDRT (Non-Driving Related Task)의 유무에 따라 구분하였으며 이는 반응 시간을 제외한 수행도에는 영향을 주지 않았다. 마지막으로 Schmidt et al. (2017)은 운전자의 피로 상태에 따라 수행도의 변화를 조사했다. 피로도는 자율주행이 얼마나 지속됐는지를 통해 구분하였으며 피로 상태에 따른 유의한 차이는 없었다.
다음은 환경적 특성으로 교통 밀도, 위험 상황의 종류에 따라 제어권 전환 수행도가 어떻게 변화하는지에 대한 연구가 존재했다. Gold et al. (2016)은 교통 밀도 및 NDRT의 영향을 연구했다. 그 결과 주변에 차량이 많이 존재할수록 제어권 전환에 악영향을 미치는 것을 알 수 있었다. 또한, Walch et al. (2015)는 위험 상황의 종류가 운전자의 행동에 미치는 영향을 조사했으며 상황에 따라 다른 수행도를 볼 수 있었다.
마지막은 차량적 특성으로 제어권 전환 알림에 대한 영향을 조사한 연구들이 존재했다. Borojeni et al. (2017)과 Naujoks et al. (2014)은 제어권 전환 알림의 양식에 따른 영향을 비교했으며 알림의 양식에 따라 다른 운전자의 제어권 전환에 대한 반응 시간과 수행도가 달라짐을 알 수 있었다. 또한, 제어권 전환 알림이 있고부터 위험 상황까지 도달하는데 걸리는 시간을 의미하는 TORlt (Takeover Request Lead Time, Eriksson and Stanton, 2017)의 영향에 대한 연구도 많이 진행되었다(Mok et al., 2015; Payre et al., 2016). Mok et al. (2015)에서는 TORlt가 2, 5, 8초일 때의 운전자의 수행도를 비교했으며, Payre et al. (2016)에서는 짧은 TORlt(2초)와 긴 TORlt(30초)를 비교하였다.
위와 같이 많은 요인들이 제어권 전환 상황에서 운전자 수행도와 작업부하에 영향을 미치는 것을 알 수 있다. 앞서 언급했다시피, 제어권 전환 상황에서 운전자의 작업부하는 제어권 전환에 대한 반응 시간 및 수행도에 많은 영향을 줄 것이다. 본 연구에서는 이러한 요인들 중 TORlt의 영향에 대해 알아볼 것이다. 따라서 앞서 언급했던 요인들 중 TORlt를 제외하고 작업부하에 영향을 줄 수 있는 NDRT의 종류 · 교통 밀도 · 제어권 전환 알림 양식 등을 모두 동일하게 통제한 후 TORlt에 따른 제어권 전환 상황에서의 작업부하를 연구할 것이다.
2.1 Workload by subjective measure
본 논문에서는 작업부하를 측정하기 위해 주관적 · 객관적 방법을 모두 이용하여 측정하였다. 먼저 주관적 측정 방법으로는 Driving Activity Load Index (DALI, Pauzié, 2008)를 이용하였다. DALI는 운전 상황에서 작업부하를 측정하기 위한 NASA-TLX를 수정한 방법으로 운전 상황에 맞게 작업부하에 영향을 주는 측정 항목들을 수정하였다. NASA-TLX의 경우 육체적 요구, 정신적 요구, 시간적 요구, 노력, 수행도, 좌절감을 측정 항목으로 포함하고 있으나, DALI의 경우 주의 노력, 시각적 요구, 청각적 요구, 시간적 요구, 간섭, 상황적 스트레스 등을 측정 항목으로 제시하고 있으며 각 항목에 대한 설명은 Table 2와 같다.
|
Sub-Dimensions |
Happiness |
|
Effort of attention |
To evaluate the attention required by the activity - to think
about, to decide, to choose, to look for and so on |
|
Visual demand |
To evaluate the visual
demand necessary for the activity |
|
Auditory demand |
To evaluate the auditory
demand necessary for the activity |
|
Temporal demand |
To evaluate the specific
constraint owing to timing demand when running the activity |
|
Interruption |
To evaluate the possible disturbance when running the driving
activity simultaneously with any other supplementary task such as phoning,
using systems or radio and so on |
|
Situational stress |
To evaluate the level of constraints/stress while conducting the
activity such as fatigue, insecure feeling, irritation, discouragement and so
on |
2.2 Workload by objective measure
작업부하를 객관적으로 측정하는 방법으로 생리신호 측정을 수행했다. 주관적 측정 방법은 실험이 모두 끝난 후 설문조사를 통해 측정한다. 따라서 운전과 같이 동적 상황에서의 작업부하를 측정하기에 적합한 방법은 아니다. 이와 다르게 생리신호를 통한 작업부하는 실시간으로 측정하고 분석할 수 있기 때문에 운전 상황에 적용하기에 보다 적합하다. 이러한 이유로 본 연구에서는 주관적 측정 방법과 동시에 생리신호를 통해 작업부하를 측정하는 방법을 사용하였다. 본 연구에서는 다양한 생리신호 중 호흡률(RSP rate, Respiration rate)을 통해 자율주행 상황에서 작업부하를 표현할 수 있는지 확인해 봤다. 호흡률은 측정이 간단하고 작업부하에 민감하다(De Waard, 1996; Hajek et al., 2013; Mehler et al., 2009; Rendon-Velez et al., 2016; van Leeuwen et al., 2017). 호흡신호는 대역 필터(0.05~1Hz)로 신호에서 저주파 드리프트와 고주파 노이즈를 제거하였다. 필터링 된 신호에서 연속된 들숨의 최고치 사이의 시간을 통해 호흡률을 계산하였다. 수집된 호흡률을 작업부하로 표현하기 위해 데이터를 추가적으로 가공하였다. 기존 작업부하 연구들에서는 작업부하를 작업 수행자가 사용한 인지적 자원들을 가용 시간으로 나눈 값으로 나타냈다(Jo et al., 2012; Just et al., 2003; Wickens et al., 2004). 또한, 생리신호의 값은 인지적 자원들에 의해 활성화 되며 사용하는 인지적 자원들에 의해 그 값이 변화한다(Just et al., 2003; Kramer, 1991; Ryu and Myung, 2005). 따라서, 호흡률의 그래프를 적분함으로써 사용된 인지적 자원의 양을 알 수 있고, 이를 가용 시간으로 나누어 작업부하 값으로 사용했다.
2.3 Apparatus
실험 환경은 OpenDS 4.5 운전 시뮬레이터를 사용하여 설계하였으며 45인치 크기의 모니터를 통해 나타냈다. 참가자들은 Logitech G25 핸들 · 페달 · 컨트롤러를 통해 운전을 하였고 운전과 동시에 iPad mini 4를 통해 NDRT를 수행하였다. 생리신호들은 Biopac MP100으로 200Hz에서 샘플링한 후 Acqknowledge 3.9를 통해 필터링한 밴드(0.05~1Hz)로 기록하였다.
2.4 Participants
고려대학교 학생 8명(남자 6명, 여자 2명, 평균 연령 24.0세, 표준편차 2.45세)을 모집하여 실험을 진행하였다. 모든 참가자들은 유효한 운전 면허를 소지했으며 시력 또는 교정시력이 정상이었다. 실험을 하기 전에 모든 참가자들은 서면 동의서를 작성하고 실험에 대한 설명을 들었다. 연구 참여는 자발적으로 이루어졌으며 각 참여자에게는 실험 수당으로 20,000원을 지급하였다.
2.5 Experiment
조건부 자동화 운전에서 운전자 작업부하에 대한 TORlt의 영향을 파악하기 위해 TORlt를 독립변수로 설정하였으며 총 7단계(3, 7, 10, 15, 30, 45, 60초)로 나누었다. 운전자 작업부하는 종속변수로 주관적 측정 방법과 생리신호를 통해 측정했다. 추가적인 분석을 통해 운전 시뮬레이터 및 iPad의 디스플레이를 카메라를 통해 녹화했다.
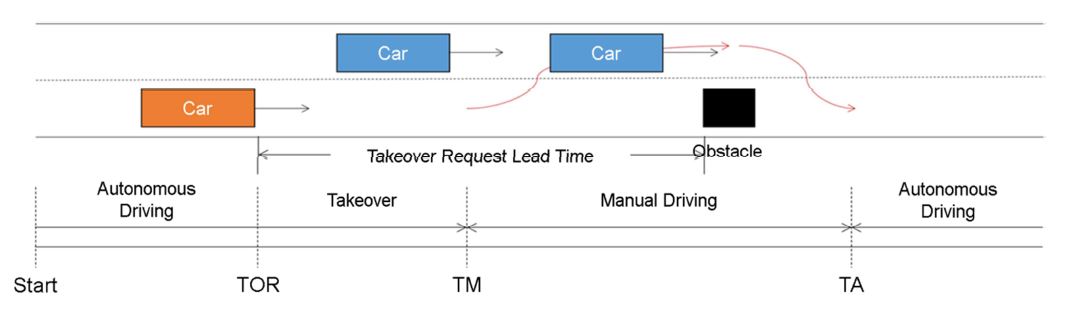
먼저 실험 참가자는 Figure 1과 같이 2차선에서 자율주행 모드로 실험을 시작한다. 자율주행 시스템은 주행 차로에 장애물이 있음을 운전자보다 먼저 확인하고 알려준다. 하지만 1차선에는 실험 차량 이외에 두 대의 차량이 있으므로 시스템이 운전자에게 제어권 전환 알림을 언제 부여할지 결정한다. 운전자가 제어권 전환 알림 이후에 반응하지 않으면 TORlt가 지나고 나면 장애물과 충돌하게 되므로 운전자는 제어권 전환 알림에 반응하여 운전 상황을 모니터링하고 제어권을 이양받아야 한다. 운전자가 제어권을 받게 되면 차선이동을 통해 장애물을 피하고 원래 차선으로 돌아가는 작업을 수행한다. 차선이동을 마친 후에 운전자는 본인이 안정화됐다고 느낄 때까지 수동운전을 지속하고 그 이후에 다시 자율주행으로 전환한다. 실험 참여자는 이와 같은 실험을 고스트 세션과 7개의 TORlt를 포함하여 총 8번 수행하며 실험 순서는 무작위로 진행된다. 고스트 세션은 제어권 전환 알림은 발생하나 장애물이 없는 상황으로 실험 참여자가 제어권 전환 알림에 반사적으로 반응하는 것을 막기 위해 추가했다.
각 세션은 NDRT와 함께 진행됐으며 세션이 끝난 후에는 주관적 작업부하를 측정하기 위해 설문지를 작성했다. 실험이 시작되고 30초가 지나면 자율주행 시스템은 소리를 통해 제어권 전환 알림을 부여했다. 참가자는 제어권 전환 알림이 발생하면 제공된 TORlt 내에 컨트롤러의 버튼을 눌러 수동운전으로 전환해야 한다. 수동운전을 통해 장애물을 피해 차선이동을 완료한 후에는 다시 버튼을 눌러 자율주행을 전환한다. 자율주행으로 전환이 완료되면 한 번의 세션이 완료되고 실험 참가자는 DALI 설문지 작성을 통해 주관적 작업부하를 측정한다.
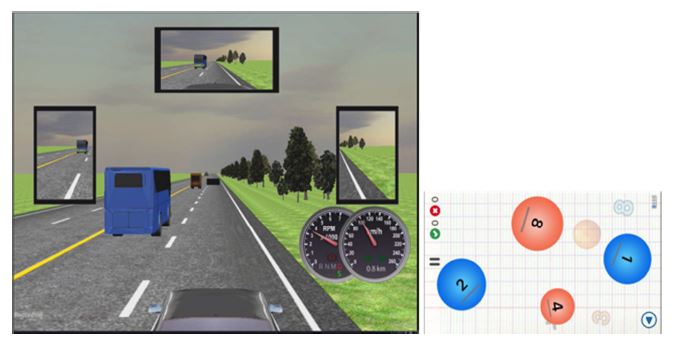
Figure 2에 운전 시뮬레이터와 NDRT의 디스플레이가 나와있다. 먼저 운전 시뮬레이터에서 운전 상황은 고속도로의 직선주행 상황을 가정하였으며, 2차선에는 참가자가 조작하는 검정색 차량이 있다. 2차선에는 실험 차량 이외의 차량은 없었으며, 1차선에는 3대의 차량을 배치하였다. 그 중 두 대는 참가자의 차량보다 앞서있고 한 대는 뒤에서 주행한다. 실험 차량을 포함한 모든 차량들은 시속 100km로 주행한다. 시뮬레이터에서 TOR이 발생하면 주행 차로에 검정색 장애물이 나타나며 운전자는 이를 파악하고 반응해야 한다.
Figure 2 왼쪽에 보이는 그림은 실험 참가자가 수행하는 NDRT이다. NDRT는 iPad를 이용한 게임이다. 실험 참가자들은 화면이 나오는 번호를 오름차순으로 터치하는 과제를 수행했다. 이 과제는 Figure 1에서 나타나는 자율주행 구간에서 진행되었으며, 조건부 자율주행 자동차를 가정하기 위해 시각적 자원이 많이 사용되는 과제를 선정하였다.
2.6 Procedure
실험 시작 전, 참가자들은 실험에 대한 정보가 담긴 설명서를 읽고 실험 동의서를 작성하였다. 이후, 참가자들은 호흡을 측정하기 위해 호흡 벨트를 착용하였다. 생리신호에 대한 교정을 거친 후 짧은 휴식 시간을 가졌다.
휴식 후 참가자들은 운전 시뮬레이터에 익숙해질 수 있는 시간을 가졌다. 참가자들은 운전 시뮬레이터 실험에서 사용할 핸들, 페달, 자율주행 전환 버튼의 위치 및 조작 방법에 대해 익숙해질 때까지 연습을 진행하였다. 연습이 끝나고 나서, 실제 실험 과제를 통해 훈련 세션을 진행하였다. 훈련 세션에서는 DALI를 작성하는 방법, iPad를 통한 NDRT, 그리고 자율주행 시나리오 등에 대한 설명을 들었다. 훈련이 끝난 후에 참가자들은 총 8번의 주행으로 이루어진 실험을 진행했다. 각 주행 사이에는 5분의 휴식이 주어졌으며, 휴식 시간에 참가자들은 주관적 작업부하 설문지를 작성했다.
3.1 Subjective workload measure by DALI
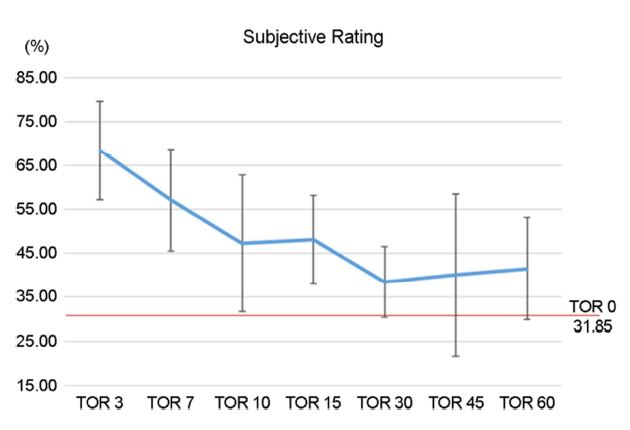
DALI를 통해 측정한 주관적 작업부하의 평균값과 표준편차를 Figure 3에 나타냈으며 그림에 빨간색 선은 고스트 세션의 평균 작업부하를 의미한다. 분산 분석(ANOVA) 결과 주관적 작업부하는 TORlt에 의해 유의미한 영향을 받는다는 것을 알 수 있었다(F (6,49) = 4.95, p-value = 0.0005). 이에 Fisher's Least Significant Difference (LSD)를 통해 다중 비교 분석을 진행한 결과 Table 3과 같이 3 · 7초, 7 · 10 · 15초, 10 · 15 · 30 · 45 · 60초의 세 그룹으로 구분할 수 있었다. 그래프와 다중 비교 분석 결과에 따르면 TORlt가 3초일 때, 주관적 작업부하가 가장 높은 값을 가지며 TORlt가 30초까지 증가함에 따라 작업부하는 점점 감소함을 보여준다. TORlt가 45초와 60초일 경우 작업부하가 수치적으로는 약간 증가하는 경향이 있었으나 실제 통계적으로 유의한 차이를 보이지는 않았다.
|
TORlt |
Mean (%) |
Grouping (LSD) |
||
|
3 |
68.44 |
A |
|
|
|
7 |
57.08 |
A |
B |
|
|
15 |
48.13 |
|
B |
|
|
10 |
47.29 |
|
B |
C |
|
60 |
41.46 |
|
|
C |
|
45 |
40.10 |
|
|
C |
|
30 |
38.44 |
|
|
C |
3.2 Objective workload measure by respiration rate
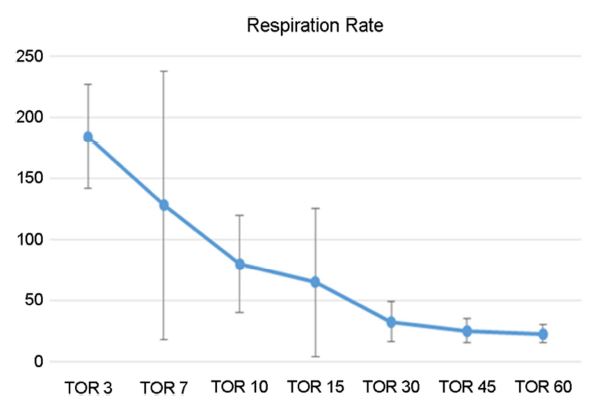
호흡률은 실험이 시작한 후로 제어권 전환 알림에 반응하여 수동운전으로 전환하고 다시 자율운전으로 전환하는 실험 전체에 대해 데이터를 수집 · 분석했다. 주관적 작업부하의 측정 기간이 실험 전체이기 때문에 동일한 기간 동안의 생리신호를 측정하였다. 호흡률에 따른 객관적인 작업부하는 Figure 4에 나타냈다. 객관적인 작업부하는 TORlt가 증가함에 따라 점차 감소했다. 분산 분석(ANOVA) 결과 객관적인 작업부하가 TORlt에 의해 유의미한 영향을 받았다는 것을 나타낸다(F (6, 49) = 10.38, p-value <0.0001). Fisher's Least Significant Difference (LSD)를 통해 다중 비교 분석을 진행한 결과 Table 4와 같이 3초, 7 · 10초, 10 · 15 · 30초, 15 · 30 · 45 · 60초의 네 그룹으로 구분할 수 있었다. 그래프와 다중 비교 분석 결과에 따르면 TORlt가 3초에서 가장 높은 값을 가지며 TORlt가 증가함에 따라 작업부하는 점점 감소하는 경향을 보인다. 하지만 TORlt가 길어지면 TORlt 간의 작업부하의 차이는 통계적으로 유의미하지 않음을 알 수 있었다.
|
TORlt |
Mean (bpm) |
Grouping (LSD) |
|||
|
3 |
184.01 |
A |
|
|
|
|
7 |
127.90 |
|
B |
|
|
|
10 |
79.94 |
|
B |
C |
|
|
15 |
65.27 |
|
|
C |
D |
|
30 |
32.88 |
|
|
C |
D |
|
45 |
25.46 |
|
|
|
D |
|
60 |
23.22 |
|
|
|
D |
3.3 Comparison between subjective and objective workload
호흡률이 주관적 측정 방법을 대신하여 자율주행 상황에서의 작업부하를 표현할 수 있는지 확인하기 위해 각 TORlt에서의 호흡률과 DALI 값을 비교했다. 각 TORlt 상에서의 호흡률과 DALI 값에 대한 평균을 통해 상관관계를 보았다. 그 결과 두 값 사이에 유의미한 상관관계(p-value <0.0001)이 나타났으며, 상관계수 또한 굉장히 높은 값을 가졌다(r = 0.98).
본 연구의 목적은 운전자 작업부하에 대한 TORlt의 영향을 파악하는 것이다. 운전 시뮬레이터를 통해 실험을 실시한 결과 TORlt는 운전자의 주관적 · 객관적 작업부하에 모두 영향을 미치는 것을 알 수 있었다. TORlt가 3초일 경우 작업부하의 값은 두 가지 방법에서 모두 가장 높았다. 선행 연구들에서 제어권 전환 상황에서 시간적인 여유가 없을 경우 운전자의 수행도에 악영향을 미친다고 하였다(Mok et al., 2015; Naujoks et al., 2014; van den Beukel and van der Voort, 2013). 이는 이 논문의 결과인 너무 짧은 TORlt를 부여했을 때 작업부하가 높아지는 것을 이러한 수행도 저하의 원인으로 볼 수 있을 것이다.
또한, 연구 결과에 따르면 TORlt가 길어지면서(45, 60초) TORlt에 따른 작업부하의 차이가 통계적으로 유의미하지 않음을 알 수 있었다. 이는 긴 TORlt에서 운전자들의 모니터링 시간이 더 길어지기 때문이다. 따라서 긴 TORlt에서 운전자가 수행하는 작업의 총량은 증가하지만 동시에 가용 시간도 증가한다. 따라서 본 연구에서 사용한 생리신호를 작업부하로 표현한 방법인 '사용한 인지적 자원의 총량 / 가용 시간'에서 분모와 분자가 동시에 높아져 서로 차이가 크게 나지 않는 것을 알 수 있다.
마지막으로 본 연구에서는 작업부하를 측정하는 방법으로 주관적 측정 방법인 DALI와 생리적 측정 방법인 호흡률을 사용하였다. 많은 작업부하 연구들에서 작업부하를 측정하는 방법으로 주관적 측정 방법을 사용한다. 주관적 측정 방법은 작업 수행자의 작업부하를 높은 정확도로 측정할 수 있다. 하지만 이는 작업을 마친 후 설문조사를 통해 측정하므로 운전 등 동적 상황에서 측정할 수 없다는 한계점이 있다. 반면, 생리신호는 작업부하를 실시간으로 측정할 수 있어 동적 환경에서 적용하기에 적합하다. 따라서 본 연구에서는 제어권 전환 상황에서 운전자 작업부하를 측정하는 방법으로 생리신호가 주관적 작업부하를 대체할 수 있는지 알아보았다. 이 실험에서는 호흡률을 측정 방법으로 선택하여 주관적 작업부하와 비교하였다. 그 결과 호흡률을 통한 작업부하가 주관적 작업부하와 높은 상관관계를 가짐을 알 수 있었다. 따라서 자율주행, 특히 제어권 전환 상황에서 생리신호를 통해 작업부하를 측정할 수 있음을 알 수 있었다. 본 연구에서는 호흡률만을 통해 작업부하를 표현하였지만 연구들에 따르면 심전도(ECG), 동공 크기(Pupil Diameter), 피부전도도(GSR) 등 여러 생리신호를 함께 측정했을 때 더 높은 정확도로 작업부하를 측정할 수 있음을 알 수 있다(Just et al., 2003; Ryu and Myung, 2005). 따라서 추후 연구에서는 다양한 생리신호를 측정하는 것이 필요할 것이다.
조건부 자율주행(SAE 3단계)에서는 운전자가 자율주행 시스템과 소통을 해야한다. 운전자는 차량이 제어권 전환을 요청할 때, 차량을 제어해야 하지만 자율주행 상황이 오래 지속되어 운전자의 작업부하가 낮아지거나 갑작스러운 제어권 전환 요청이나 NDRT 수행에 의해 작업부하가 높아질 수 있다. 작업부하가 비정상적으로 높아지거나 낮아지게 되면 제어권 전환 상황에서 운전자의 수행도에 악영향을 미칠 수 있으므로 작업부하가 어느 정도인지 파악하는 것이 필요하다. 따라서 본 연구에서는 TORlt에 따라 작업부하가 어떻게 변화하는지를 알아보았으며, 주관적 측정 방법 이외에도 운전 상황에 적합한 작업부하 측정 방법인 생리신호(호흡률)를 통해 작업부하를 도출했다. 두 방법의 작업부하를 비교해보았을 때, TORlt가 짧을 경우 작업부하가 높았으며 TORlt가 길어질수록 작업부하 간 차이가 유의미하지 않았다. 이러한 결과를 보았을 때, TORlt는 작업부하에 큰 영향을 미침을 알 수 있었으며, 제어권 전환 상황에서 주관적 작업부하 측정 방법을 생리신호를 통한 측정 방법으로 대체할 수 있음을 알 수 있었다.
References
1. Borojeni, S.S., Wallbaum, T., Heuten, W. and Boll, S., Comparing Shape-Changing and Vibro-Tactile Steering Wheels for Take-Over Requests in Highly Automated Driving. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 221-225). ACM, 2017.
Crossref
Google Scholar
2. Brookhuis, K.A. and Waard, D., Assessment of Drivers' Workload: Performance and Subjective and Physiological Indexes. in Stress, workload and fatigue, P.A. Hancock and P.A. Desmond (Eds.). Mahwah, NJ: Lawrence Erlbaum, 321-333, 2001.
Crossref
Google Scholar
3. De Waard, D., The measurement of drivers' mental workload. Netherlands: Groningen University, Traffic Research Center, 1996.
Crossref
Google Scholar
4. De Winter, J.C., Happee, R., Martens, M.H. and Stanton, N.A., Effects of adaptive cruise control and highly automated driving on workload and situation awareness: A review of the empirical evidence. Transportation research part F: traffic psychology and behaviour, 27, 196-217, 2014.
Crossref
Google Scholar
5. Endsley, M.R. and Kiris, E.O., The out-of-the-loop performance problem and level of control in automation. Human Factors, 37(2), 381-394, 1995.
Crossref
Google Scholar
6. Eriksson, A. and Stanton, N.A., Takeover time in highly automated vehicles: noncritical transitions to and from manual control. Human Factors, 59(4), 689-705, 2017.
Crossref
Google Scholar
7. Feldhütter, A., Gold, C., Schneider, S. and Bengler, K., How the duration of automated driving influences take-over performance and gaze behavior. In Advances in Ergonomic Design of Systems, Products and Processes (pp. 309-318). Springer, Berlin, Heidelberg, 2017.
Crossref
Google Scholar
8. Gold, C., Körber, M., Lechner, D. and Bengler, K., Taking over control from highly automated vehicles in complex traffic situations: the role of traffic density. Human Factors, 58(4), 642-652, 2016.
Crossref
Google Scholar
9. Greenlee, E.T., DeLucia, P.R. and Newton, D.C., Driver vigilance in automated vehicles: hazard detection failures are a matter of time. Human Factors, 60(4), 465-476, 2018.
Crossref
Google Scholar
10. Hajek, W., Gaponova, I., Fleischer, K.H. and Krems, J., Workload-adaptive cruise control-A new generation of advanced driver assistance systems. Transportation research part F: traffic psychology and behaviour, 20, 108-120, 2013.
Crossref
Google Scholar
11. Jo, S., Myung, R. and Yoon, D., Quantitative prediction of mental workload with the ACT-R cognitive architecture. International Journal of Industrial Ergonomics, 42(4), 359-370, 2012.
Crossref
Google Scholar
12. Just, M.A., Carpenter, P.A. and Miyake, A., Neuroindices of cognitive workload: Neuroimaging, pupillometric and event-related potential studies of brain work. Theoretical Issues in Ergonomics Science, 4(1-2), 56-88, 2003.
Crossref
Google Scholar
13. Körber, M., Gold, C., Lechner, D. and Bengler, K., The influence of age on the take-over of vehicle control in highly automated driving. Transportation research part F: traffic psychology and behaviour, 39, 19-32, 2016.
Crossref
Google Scholar
14. Körber, M., Prasch, L. and Bengler, K., Why do I have to drive now? Post hoc explanations of takeover requests. Human Factors, 60(3), 305-323, 2018.
Crossref
Google Scholar
PubMed
15. Kramer, A.F., Physiological metrics of mental workload: A review of recent progress. Multiple-task Performance, 279-328, 1991.
Crossref
Google Scholar
16. Mehler, B., Reimer, B., Coughlin, J. and Dusek, J., Impact of incremental increases in cognitive workload on physiological arousal and performance in young adult drivers. Transportation Research Record: Journal of the Transportation Research Board, (2138), 6-12, 2009.
Crossref
Google Scholar
17. Mok, B.K., Johns, M., Lee, K.J., Miller, D., Sirkin, D., Ive, H.P. and Ju, W., Emergency, Automation Off: Unstructured Transition Timing for Distracted Drivers of Automated Vehicles. In ITSC (pp. 2458-2464), 2015.
Crossref
Google Scholar
18. Naujoks, F., Mai, C. and Neukum, A., The effect of urgency of take-over requests during highly automated driving under distraction conditions. Advances in Human Aspects of Transportation, 7(Part I), 431, 2014.
Crossref
Google Scholar
19. Pauzié, A., A method to assess the driver mental workload: The driving activity load index (DALI). IET Intelligent Transport Systems, 2(4), 315-322, 2008.
Crossref
Google Scholar
20. Payre, W., Cestac, J. and Delhomme, P., Fully automated driving: Impact of trust and practice on manual control recovery. Human Factors, 58(2), 229-241, 2016.
Crossref
Google Scholar
21. Rendon-Velez, E., Van Leeuwen, P.M., Happee, R., Horváth, I., Van der Vegte, W.F. and De Winter, J.C.F., The effects of time pressure on driver performance and physiological activity: a driving simulator study. Transportation research part F: traffic psychology and behaviour, 41, 150-169, 2016.
Crossref
Google Scholar
22. Ryu, K. and Myung, R., Evaluation of mental workload with a combined measure based on physiological indices during a dual task of tracking and mental arithmetic. International Journal of Industrial Ergonomics, 35(11), 991-1009, 2005.
Crossref
Google Scholar
23. SAE International. Taxonomy and definitions for terms related to driving automationsystems for on-road motor vehicles. (J3016_201609). Warrendale, PA: Author, 2016.
Crossref
24. Saffarian, M., de Winter, J.C. and Happee, R., Automated driving: human-factors issues and design solutions. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Vol. 56, No. 1, pp. 2296-2300). Sage CA: Los Angeles, CA: Sage Publications, 2012.
Crossref
Google Scholar
25. Schmidt, J., Dreißig, M., Stolzmann, W. and Rötting, M., The Influence of Prolonged Conditionally Automated Driving on the Take-Over Ability of the Driver. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Vol. 61, No. 1, pp. 1974-1978). Sage CA: Los Angeles, CA: SAGE Publications, 2017.
Crossref
Google Scholar
26. van den Beukel, A.P. and van der Voort, M.C., The influence of time-criticality on Situation Awareness when retrieving human control after automated driving. In Intelligent Transportation Systems-(ITSC), 2013 16th International IEEE Conference on (pp. 2000-2005). IEEE, 2013.
Crossref
Google Scholar
27. van Leeuwen, P., Landman, R., Buning, L., Heffelaar, T., Hogema, J., van Hemert, J. M., de Winter J.C.F. and Happee, R., Towards a real-time driver workload estimator: an on-the-road study. In Advances in Human Aspects of Transportation (pp. 1151-1164). Springer, Cham, 2017.
Crossref
Google Scholar
28. Walch, M., Lange, K., Baumann, M. and Weber, M., Autonomous driving: investigating the feasibility of car-driver handover assistance. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 11-18). ACM, 2015.
Crossref
Google Scholar
29. Wickens, C.D., Lee, J.D., Liu Y. and Gordon-Becker, S.E., An introduction to human factors engineering, 2004.
Crossref
30. Zeeb, K., Buchner, A. and Schrauf, M., What determines the take-over time? An integrated model approach of driver take-over after automated driving. Accident Analysis & Prevention, 78, 212-221, 2015.
Crossref
Google Scholar
PIDS App ServiceClick here!