eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Sung Hyun Bae
, Jong Gyu Shin
, In Seok Huh
, Sang Ho Kim
10.5143/JESK.2020.39.2.129 Epub 2020 May 03
Abstract
Objective: This study is to identify the components and qualitative criteria for assessing the usability of wearable robots in industrial use.
Background: Wearable robot technology is a state-of-the-art application of human-robot interaction (HRI) but research on its usability from the user's point of view is insufficient. It is necessary for the wearable robot industry to establish safety standards and usability assessment system for deploying the technology on a commercial scale.
Method: Sets of user requirements were identified from previous researches regarding with analogous products including walking aids, assistive and wearable devices. Qualitative assessment criteria were developed on the basis of user requirements classified by usability components and the structure of wearable robots.
Results: The usability of wearable robots needs to be evaluated by 6 components: wearability, effectiveness, learnability, efficiency, utility, and safety. Qualitative assessment criteria consisted of 38 questionnaires corresponding to the identified user requirements that belong to each component.
Conclusion: The 6 components with 38 assessment criteria would be utilized as the basis for further development of the usability assessment standard.
Application: The assessment criteria provide ideas and checklists for designing wearable robots with good usability.
Keywords
Usability Qualitative assessment Wearable robots Human-Robot interaction Upper extremities
4차 산업혁명기를 맞아 여러 기술들이 발전과 융합을 거듭하고 있고, 로봇공학 또한 센서와 인공지능의 발달에 힘입어 많은 기술적 진보를 이루고 있다(Karabegovic and Husak, 2018). 이에 따라 제조업을 비롯해 산업계에서는 생산성 향상과 원가 절감을 위해 smart factory 기술을 도입하고 인간의 노동력을 로봇으로 대체하려는 추세가 더욱 강하게 나타나고 있다(Min et al., 2019). 한편으로는 노동강도를 낮추어 주면서도 작업자와 협업할 수 있는 웨어러블 로봇에 대한 관심도 높아지고 있으며 최근에는 상용화 역시 빠르게 진행되고 있다(Bostelman and Hong, 2018). 인간과 웨어러블 로봇의 협업을 통해 생산성을 증대시키면서도 자동화로 인한 일자리 감소와 같은 사회적 문제를 완화시킬 수 있을 것으로 기대되기 때문이다(De Looze et al., 2015).
웨어러블 로봇은 배터리를 동력원으로 하여 인간의 움직임을 지지하거나 근력을 증강해주는 로봇을 말하며 센서를 이용해 몸의 움직임을 감지하고 행동 예측을 통해 철제 외골격이나 와이어를 움직이는 방식으로 작동한다(HyundaiRotem Official Blog, 2017). 부위 별로 상지, 하지, 전신으로 나누어져 있으며 특히, 하지 웨어러블 로봇에 관한 연구는 상당 수준 진행되어 실제 산업현장에서 활용하는 기업이 다수 존재한다. 하지만 전신과 상지 웨어러블 로봇의 경우 기저부가 고정되어 있어서 사용자의 이동성을 보장할 수 없고 고가의 센서와 전자 장비를 다수 적용하여 시스템이 고가이며, 일부 시스템들은 EMG와 같은 생체 신호를 동기 신호로 사용하고(Kim et al., 2009; Hasegawa and Muramatsu, 2013) 착용이 어렵다는 특성 때문에 실제 산업현장에서 활용되고 있는 사례는 많지 않다(Lee et al., 2007). 하지만 전신, 상지 웨어러블 로봇에 대한 필요성이 높아지고 수요가 증가함에 따라 국외는 물론 국내에서도 관련 연구가 활발히 진행되고 있으며(Kim et al., 2019), 현대로템에서는 2010년부터 산업용 근력증강 로봇을 개발해 실제 모습을 공개하기도 하였다(HyundaiRotem Official Blog, 2019).
이처럼 산업 분야에서는 산업용 상지 웨어러블 로봇의 실용화를 위한 시도들이 지속되고 있지만, 그 특성상 기계적 시스템 개발이나 근력 보조를 위한 생체역학적 연구가 주류를 이루고 있다. 이로 인해 웨어러블 로봇과 이를 사용하는 작업자 간의 상호작용을 원활하게 해주기 위한 사용성 평가에 관해서는 연구들이 아직 미비한 실정이다(Spada et al., 2017). 사용자들을 웨어러블 로봇의 설계 단계에 참여할 수 있도록 하기 위한 설문조사 기반의 인간중심적 설계방안을 도출하려는 연구에서도 설계 방식과 관련해 표준화된 프레임워크와 안전성 평가에 관한 가이드라인이 부족하다는 불만이 존재한다(Ármannsdóttir et al., 2020). 산업용 웨어러블 로봇의 표준 규정을 위해 산업용 상지 웨어러블 로봇을 개발한 EU의 Robo-Mate 프로젝트팀은 자신들의 연구 결과를 이용하여 국제표준을 준비 중이며, 적절한 표준 규정을 통해 안전하고 신뢰할 수 있는 산업용 웨어러블 로봇의 설계와 제조가 가능하다고 주장하였다(O'Sullivan et al., 2015).
본 연구는 향후 산업현장에서 상지 웨어러블 로봇이 보다 효율적이고 편리하게 사용될 수 있도록 하기 위해 제품 개발과 안전성 평가과정에 적용이 가능한 인간공학적 사용성 평가항목들을 개발하는 것에 목표를 두고 진행하였다. 웨어러블 로봇의 특성상 신체에 직접적으로 착용하기 때문에 작업자의 안전과 직결되고 작업수행에 따른 부담을 감소시키는 것이 목적이므로 안전성과 작업부담의 경감 효과를 중심으로 사용성 평가항목들을 도출하고자 하였다.
2.1 Definition and classification of wearable robots
외골격 로봇(exoskeleton robot)이라고도 불리는 웨어러블 로봇은 착용자의 행동 의도를 파악하는 기술을 기반으로 구동기를 작동시켜 중량물이나 행동 지속성을 지원해준다(Hong and Jang, 2016). 웨어러블 로봇은 활용 목적, 착용 부위, 전원 여부, 이동성, 제어 방식, 재질에 따라 분류할 수 있다(Marinov, 2015). 특히 착용 후 사용하는 웨어러블 로봇의 사용성과 관련된 항목은 착용 부위, 이동성, 제어 방식이 관련이 깊다고 볼 수 있다. 착용 부위는 전신, 상지, 하지로 분류되고, 일반적으로 상지는 팔과 몸통을 칭하며 손목과 손가락, 팔꿈치와 어깨의 관절과 같은 특정 부위로 세분화할 수 있다(Rosen and Perry, 2007). 하지는 다리 부위를 말하며 엉덩이, 무릎과 발목으로 세분화되며 엉덩이-무릎, 엉덩이-발목, 무릎-발목 또는 엉덩이-무릎-발목을 전부 보조하는 로봇으로 세분화된다(Pamungkas et al., 2019).
이동성을 기준으로 분류하면 고정식, 지원형, 이동식으로 나눌 수 있는데, 고정식은 고리와 벨트 등의 장치를 벽이나 받침대에 부착하는 형식이다. 지원형은 머리 위에 달린 레일 또는 움직이는 프레임 등에 고정함으로써 모터나 배터리와 같은 장치 자체의 무게를 감소시켜 착용자의 이동성을 더욱 편히 보장할 수 있다. 이동식 웨어러블 로봇은 착용자가 자유롭게 이동이 가능하지만 장비의 무게가 무거울 경우에는 이동에 제약이 따른다(Bae, 2017).
제어 방식은 조이스틱, 버튼 혹은 컨트롤 패널, 뇌파를 이용한 제어, 제어 방식이 없는 로봇, 센서에 의한 제어에 따라 분류할 수 있다. 조이스틱은 착용자가 원하는 작업을 수행하기 위해 에너지의 100%를 사용하는 웨어러블 로봇에 응용되고, 센서의 경우에는 회전, 기울기, 토크, 압력 등을 감지하고 다리, 팔의 신경 신호를 포착하는 센서들에 의하여 제어될 수 있다(Bae, 2017). 재질의 경우 섬유와 같은 유연한 재료인지, 금속과 같은 단단한 재료인지에 따라 구분된다(Kim et al., 2019).
2.2 Definition and components of usability
사용성이란 제품 혹은 서비스 등 기업이 창출해 내는 유형, 무형의 상품에 대한 사용자의 편의성을 뜻하며, 사용성 향상을 위해서는 사용자-인터페이스에 대한 연구가 필요하다. 설계자는 자신의 관점에서 사용성이 좋은 방향으로 제품을 설계하지만 사용자가 설계과정에서 배제될 경우 사용과정에서 너무 많은 것을 기억해야 되거나 작은 실수도 용납하지 않는 기계로 인해 부담스러울 수 있다(Kee et al., 2011).
사용성의 평가 기준은 제품 또는 서비스 설계 시 앞서 살펴본 사용성 정의를 적용하기 위한 구체적인 방안을 제시하는 것이다. Nielsen은 사용성 평가를 위한 요소를 학습용이성, 효율성, 기억용이성, 에러의 최소화, 주관적 기쁨이라고 정의하였다(Nielsen, 1994). 또한 HCI 관점에서 사용성 향상을 위한 설계 원리를 적합성, 일관성과 표준, 상태 제공, 실수 방지 및 회복, 최소 정보의 사용, 도움말 제공, 시스템 융통성, 기억, 주의성으로 정의한 바 있다(Kee et al., 2011). 도움말 제공, 최소 정보의 사용, 기억, 시스템 융통성, 주의성의 원칙도 사용자의 인지적 부담을 감소시킴으로써 사용성을 높이기 위한 기준이다. Preece는 효과성, 효율성, 안전성, 실용성, 학습용이성, 기억용이성을 사용성 평가요소로 규정하고 추가적으로 가시성, 피드백, 제약조건, 일관성, 행동유도성을 디자인 원칙으로 정의하였다(Preece et al., 2015). 국제표준화기구(ISO)에서 발표한 ISO 9241-11은 사용성과 관련된 대표적인 국제표준으로 만족도, 효과성, 효율성의 3가지 요소로 사용성을 정의하고 있으며, 고품질의 제품을 설계하기 위해서는 사용성의 원칙을 전반적인 제품 개발과정에 포함하여야 한다고 강조하고 있다(ISO 9241-11, 1998).
3.1 Scope of research
본 연구에서 사용성 평가의 대상이 되는 산업용 상지 웨어러블 로봇은 기존에 개발된 로봇의 특성적 이미지와 선행 연구에서 고려한 로봇의 구성요소를 기반으로 선정하였다. 고려된 특성 이미지의 예시는 아래 Figure 1과 같다.

착용 부위 측면에서는 어깨와 팔꿈치 관절 부위에 착용하며, 팔꿈치 관절 자유도 1, 어깨 관절 자유도 3의 자유도(DOF) 4 이상으로 정의하였다. 또한, 고정식, 지원형, 이동식 로봇을 포함한 센서에 의해 제어되는 단단한 재질(금속, 탄소섬유 등)을 사용하며, 배터리 또는 전기 케이블을 연결하여 센서나 구동기를 작동시키는 전원식의 웨어러블 타입 상지 외골격 로봇을 대상으로 하였다. 상지 웨어러블 로봇이 지원하는 작업 종류는 5kg 이상의 중량물 취급 작업과 근골격계질환이 유발될 수 있는 반복적인 작업으로 규정하였다.
3.2 Procedures and data gathering
사용성 평가요소와 평가항목을 구성하기 위해 웨어러블 로봇과 관련된 사용자 요구사항과 사용성 평가 기준에 관한 데이터를 수집하였다. 산업용 상지 웨어러블 로봇은 최첨단기술이 적용된 분야로서 실제 사용자의 수나 사용경험이 있는 사람이 부족할 수밖에 없다. 따라서 사용자 요구사항은 연구대상과 유사한 특징을 가지고 있는 타 제품군에 대한 선행 연구들을 중심으로 조사하였다. 타 제품군은 웨어러블 디바이스의 특징(탈/부착, 이동성, 제어 방식 등)을 고려하여 선정하였다. 타 제품군에 대한 선행 연구에서 수집된 사용자 요구사항들은 앞장의 배경에서 제시한 사용성 평가요소의 정의를 기준으로 분류한 후 표현은 조금씩 다르더라도 요구하는 내용이 같거나 유사한 경우에는 이를 단일 요구사항으로 통합하여 반영하였다. 타 제품군의 사용자 요구사항을 사용성 평가 기준에 따라 분류하는 과정에서는 인터뷰를 통해 확보한 사용성 공학 및 UX/UI 전문가 4명의 의견을 참고하였다.
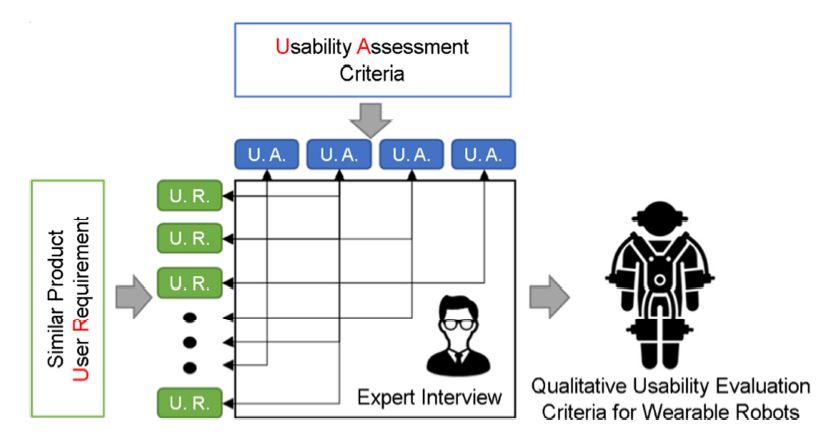
이상의 절차를 통해 결정된 평가요소와 각 요소별 사용자 요구사항들을 참고하여 상지 웨어러블 로봇의 구조와 특성을 반영한 설문 형태의 정성적 평가항목들을 도출하였다. 일반적으로 산업용 상지 웨어러블 로봇의 구조는 상박/하박부, 센서, 동력원, 체결부, 연결 케이블, 구동기, 구조체, 관절, 제어기로 구성되며, 필요에 따라 로봇의 상태를 보여주는 인터페이스 패널이 부착되는 경우도 있음을 고려하였다. 전체적인 연구절차와 흐름은 아래 Figure 2에 정리한 바와 같다.
4.1 Identification of user requirements
앞서 언급한 바와 같이 산업용 웨어러블 로봇과 관련된 사용자 요구사항은 연관성이 있는 제품군에 대한 기존 사용자들의 요구사항을 종합하여 도출하였다. 웨어러블 로봇의 주 목적이 사용자의 행동 또는 작업을 보조하는 역할이기에 그와 유사한 특징을 가진 제품군으로는 크게 보조공학기기, 보행보조기기, 기타 웨어러블 장치를 고려하였다. 보조공학기기의 경우, 주로 거동이 힘든 장애인의 행동을 보조하는 기기들에 대한 요구사항을 수집하였고 특히, 손 부위에 장애가 있는 경우를 포함한 여러 형태를 모두 고려하였다. 보행보조기기 역시 고령자와 같이 홀로 거동이 힘든 사용자를 대상으로 진행된 선행 연구들을 기반으로 요구사항을 수집하였고 웨어러블 장치는 스마트 밴드 또는 스마트 의류 등 로봇과 착용 방식이 유사한 제품에 대하여 선행된 연구를 기반으로 요구사항을 수집하였다. 본 연구에서 활용한 선행 연구의 범위와 도출된 사용자 요구사항은 Table 2에 별도로 정리하였다.
4.1.1 Assistive technology devices
장애인을 위한 대표적인 보조공학기기는 휠체어, 의수, 의족 등이 있으며 주로 하지기능을 보조하기 때문에 상지 웨어러블 로봇과는 차이가 있지만 신체 특성과 움직임의 자유를 고려해야 한다는 공통점이 있어 이들에 대한 사용자 요구사항을 고려하여야 한다고 판단하였다. 조사된 사용자 불만사항은 제품의 부피로 이한 운반의 불편함, 약한 부속 장치의 내구성, 진동으로 인한 오조작, 사이즈 문제, 세척의 불편함, 비싼 유지비용, 복잡한 사용법, 훈련부족 등이 도출되었다.
4.1.2 Walking aids
주로 고령자들이 사용하는 보행보조기기는 신체기능저하로 인한 보행 능력의 감소를 보완하고 이동성을 향상시키기 위한 용도로 사용되는 제품이다. 보행보조기기는 고령자의 보행 속도를 고려해야 하고 적정 속도를 유지해야 하므로 사용자 의도에 따라 기기가 적절하게 반응하는 것이 필수적이다. 따라서 보행보조기기의 사용자 요구사항은 주로 전체적인 신체적 특성과 조작 반응, 휴대성과 관련된 것으로 나타났으며, 신체적 특성에 연관된 요구사항은 많은 신체지지부분의 필요성, 전체적인 크기, 손잡이 높이 조절범위, 편한 손잡이 각도 등으로 나타났다. 조작 반응에서는 자동 속도조절 기능, 조작 반응의 민감도 등이 나타났으며, 휴대성에서는 무게, 보관성 등이 나타났다. 그 밖에도 자신의 건강상태를 보여주는 기능과 직관적인 디자인에 대한 요구사항도 있었다.
4.1.3 Wearable devices
마지막으로 스마트 의료밴드, 스마트 안전의류, 웨어러블 컴퓨터 등의 장치에 대한 사용자 요구사항을 조사하였다. 웨어러블 장치에 대한 사용자의 불만사항은 적응 및 착용을 위해 많은 준비 시간이 소요되고 대부분 높은 가격대를 형성하고 있으며 짧은 배터리 수명, 복잡한 사용 설명서와 착용 시 불쾌감 등이 도출되었다.
4.2 Usability components of wearable robots
앞절에서 언급한 바와 같이 사용성 평가에 관한 선행 연구(Nielsen, 1994; Kee et al., 2011; Preece et al., 2015)와 국제표준화기구에서 발표한 ISO를 바탕으로 사용성 평가 기준(ISO 9241-11, 1998)에 대한 자료를 수집한 후 산업용 상지 웨어러블 로봇에 적용할 수 있는 인간공학적 사용성 평가요소를 재정의하였다. 연구자와 적용되는 대상에 따라 다소 간의 차이는 있지만, 사용성 평가요소는 기본적으로 사용의 용이성과 사용 효과를 포함하여 5가지 내외로 구성되어 있음을 확인할 수 있었다.
기능이 비교적 단순한 기계식 제품들의 경우에는 사용자의 신체적 특성에 적합하게 설계되었는지와 같은 육체적인 측면에 중점을 둔 평가항목들을 우선 시 하고 있었다. 하지만 점차 기능이 복잡해지고 별도의 운영체계를 갖춘 제품들은 사용자가 사용법을 쉽게 이해하고 원하는 결과를 빠르고 정확하게 얻을 수 있는지와 같은 인터랙션 디자인, 사용자 중심 디자인, HCI 분야에서의 평가항목들을 포함한다. 또한 인공지능 기술을 활용한 제품들의 경우 사용자 의도를 파악하고 적절한 반응을 해야 하기 때문에 사용자가 로봇과 인터랙션 하면서 발생하는 감성에 대한 평가항목도 포함되는 추세이다. 따라서 기계 장치로서의 특성과 인공지능을 탑재한 인터랙션 장치로서의 특성을 모두 가진 웨어러블 로봇은 이들 특성을 모두 아우를 수 있는 새로운 평가요소의 구성이 필요하다고 판단하였다. 기존연구들을 통해 정의된 사용성 평가요소 중 Preece가 정의한 6가지 디자인 원칙이 상호작용하는 제품의 관점으로부터 사용성을 정의한다는 점에서 유사한 물리적 특성을 지닌 상지 웨어러블 로봇의 사용성에 관한 평가체계로 적합하다고 판단하였다. 다만 시스템의 사용법을 얼마나 쉽게 기억하는 지에 대한 기억용이성은 학습용이성과 일맥상통한다고 판단하여 학습용이성에 포함시켰다. 또한, 작업자가 직접 착용하고 작업을 진행하여야 하기 때문에 안전성이나 효율성과는 별도로 착용성(Gemperle et al., 1998; Knight et al., 2002)을 평가요소에 추가하였다.
이상과 같은 과정을 통해 정의한 웨어러블 로봇에 적용될 사용성 평가요소를 종합하면 Table 1과 같다.
|
Components |
Definition |
|
Wearability |
The degree to which the robot is easy to
be worn and carried on the worker's body |
|
Effectiveness |
The degree of work effect improved by
wearing a robot |
|
Efficiency |
The degree to avoid wasting energy,
efforts and time improved by wearing a robot |
|
Safety |
The degree to which the robot can protect
workers from internal and external dangers |
|
Utility |
The degree to which the robot can
actually be used for the job |
|
Learnability |
The degree of intuitive perception about
robot operation methods and information |
4.3 Usability assessment criteria
산업용 상지 웨어러블 로봇의 정성적 사용성 평가항목을 도출하기 위해 4.1의 상지 웨어러블 로봇의 유사 제품군에 대한 사용자 요구사항을 사용성 평가요소에 대응시켰다. 크기 조절, 관절 위치의 일치도, 탈부착 용이성과 관련된 요구사항은 착용성에 포함시켰고 비용, 신체 지지와 배터리 용량 등의 요구사항은 효과성과 관련된 항목으로 간주하였다. 추가정보제공, 사용용이성, 직관적 설계 등의 요구사항은 학습용이성에 포함시켰다. 효율성과 관련된 사용자 요구사항으로는 진동에 의한 방해, 높은 저장 능력 등이 있었고 협소한 장소의 한계 해결과 빠른 작동응답은 실용성과 관련된 것으로 판단하였다. 부피, 에러해결, 에러 시 작동정지 등과 같은 사용자 요구사항은 안전성에 포함되었다. 이상과 같은 방법으로 사용자 요구사항을 사용성 평가요소와 연계하여 정리한 결과는 Table 2와 같다.
|
Analogous products |
User requirements |
Reference |
Usability components |
|
Assistive technology |
Volume and convenience of
transportation |
Jung et al., 2009 Lee, 2014 |
Safety |
|
Easily solve accessibility problems |
Arthanat et al., 2009 Jung et al., 2009 |
Learnability |
|
|
Solve
misoperation caused by vibration |
Hong et al., 1997 |
Efficiency |
|
|
Increasing the durability of the
attachment |
Arthanat et al., 2009 Jung et al., 2009 Zacharias et al., 2019 |
Safety |
|
|
Ease
of cleaning |
Zacharias et al., 2019 |
Efficiency |
|
|
Supplemental
information about the device |
Jung et al., 2009 |
Learnability |
|
|
Solving limitations due to the
narrowness of |
Arthanat et al., 2009 Zacharias et al., 2019 |
Utility |
|
|
Solving
frequent failures of the device |
Jung et al., 2009 |
Safety |
|
|
Size adjustment |
Jung et al., 2009 Lee, 2014 |
Wearability |
|
|
Ease of use |
Jung et al., 2009 Lee, 2014 |
Learnability |
|
|
Low
cost |
Jung et al., 2009 |
Efficiency |
|
|
Supplement to training required for use |
Arthanat
et al., 2009 Jung et
al., 2009 Lee, 2014 Zacharias
et al., 2019 |
Learnability |
|
|
Walking aids |
Overall size for human body dimensions |
Choi,
2017 Jung et
al., 2009 Lam, 2007 |
Wearability |
|
A lot body support |
Authayarat
et al., 2016 Choi,
2017 |
Effectiveness |
|
|
Angle of comfortable handle |
Authayarat
et al., 2016 Choi,
2017 Jung et
al., 2009 Lam, 2007 |
Wearability |
|
|
Adjustment of handle height |
Kim and
Cho, 2013 Médéric
et al., 2004 |
Wearability |
|
|
Adjustment of resting chair and handle |
Choi,
2017 Jung et
al., 2009 Kim and
Cho, 2013 Médéric
et al., 2004 |
Wearability |
|
|
Light product |
Authayarat
et al., 2016 Choi,
2017 Kim and
Cho, 2013 |
Wearability |
|
|
Ease of brake
operation |
Choi,
2017 |
Safety |
|
|
High storability |
Authayarat
et al., 2016 Choi,
2017 |
Efficiency |
|
|
Fast operation
response |
Kim and Cho, 2013 |
Utility |
|
|
Intuitive design |
Authayarat
et al., 2016 Choi,
2017 |
Learnability |
|
|
Function to show
health condition |
Choi,
2017 |
Learnability |
|
|
Wearable devices |
Reduced preparation time for wear and adaptation |
Kim et
al., 2015 Lee and
Oh, 2016 |
Wearability |
|
Low cost |
Jia et al., 2018 |
Effectiveness |
|
|
Long battery life |
Kim et al., 2015 |
Effectiveness |
|
|
Easy to understand
manual |
Kaewkannate and Kim, 2016 |
Learnability |
|
|
Provide the accurate
information you want |
Lee and Oh, 2016 |
Learnability |
|
|
Improving the sense of
wearing |
Kim, 2017 |
Wearablility |
결정된 6가지 사용성 평가요소에 속한 사용자 요구조건을 기반으로 사용성 정도를 평가할 수 있는 총 38가지 설문 평가항목을 개발하였는데 이를 정리하면 Table 3과 같다.
|
Usability |
Assessment criteria |
|
Wearability |
1. Is the position of the
wearable robot arm joint suitable for the body when lifting and lowering? |
|
2. Is the
position of the wearable robot arm joint suitable for the body when moving forward
and backward? |
|
|
3. Is the position of the
wearable robot arm joint suitable for the body when moving the left/right
side? |
|
|
4. Is it easy to adjust the
parts according to the body? |
|
|
5. Is it a hassle to wear
or detach the wearable robot? |
|
|
6. Are there any
restrictions on movement when wearing and working with wearable robots? |
|
|
7. Does the weight of
wearable robots interfere with your work? |
|
|
8. Is the weight balanced
when wearing wearable robots? |
|
|
Effectiveness |
9. Does the robot withstand
the weight of the workpiece while wearing wearable robots? |
|
10. Do you feel that
working with wearable robots has reduced the weight of your workpiece? |
|
|
11. When working with
wearable robots, have you been less burdened than before? |
|
|
12. Does the robot produce
enough power when working with wearable robots? |
|
|
Learnability |
13. Do you have more than
nine things to remember when operating wearable robots? |
|
14. Does it take a long
time to adapt to using a wearable robot? |
|
|
15. Is charging method of
wearable robot simple? |
|
|
16. Is it simple to turn
the wearable robot on and off? |
|
|
17. Are you presenting the
information you need to use your wearable robot? |
|
|
18. Does the size of the
interface panel affect your work? |
|
|
19. Can you easily
recognize the information displayed? |
|
|
20. Is the
robot responsive enough to my intended behavior when wearing and working with
wearable robots? |
|
|
21. When working with wearable robots,
does the robot follow well with my intentions? |
|
|
Efficiency |
22. Do you feel uneasy when working with
wearable robots because they are sensitive? |
|
23. Is the movement speed of the robot
fast when working with wearable robots? |
|
|
24. Does vibration of a wearable robot
interfere with my work? |
|
|
25. Do I feel safe with the wearable
robot at first operation? |
|
|
Utility |
26. When
wearing and working with wearable robots, Is there enough motion operation
time of the robot available? |
|
27. Is the wearable robot's battery
charging time short? |
|
|
28. Do you have enough work coverage when
wearing and working with wearable robots? |
|
|
29. Is the workpiece handling part of the
wearable robot appropriate for the job? |
|
|
30. Are the wearable robot attachments
adequate for their work strength? |
|
|
Safety |
31. Is there a risk of injury to the body
due to the heat generated by the wearable robot? |
|
32. Are you
concerned about physical effects caused by electromagnetic waves when wearing
wearable robots for a long time? |
|
|
33. Can the structure of the wearable
robot protect your body? |
|
|
34. Is there a risk that the contact structure
of the wearable robot will harm the human body? |
|
|
35. Is there a danger that the edge
finish of the wearable robot will harm the human body? |
|
|
36. Do exposed cables from wearable
robots affect working behavior? |
|
|
37. Is it simple to stop the robot when
the wearable robot malfunctions? |
|
|
38. When working with wearable robots, is
the robot's work area wider than necessary? |
로봇 팔 관절과 착용자 관절 위치의 일치성을 평가하기 위해 전방/후방, 들기/내리기, 좌측방/우측방으로 움직일 때 로봇 관절의 위치가 적절한지와 관련된 4가지 항목, 로봇 팔의 자유도가 적절한지 알아보기 위한 작업 활동에 대한 항목, 착용/탈거 시 번거로움, 로봇 팔 구조체의 조절용이성, 사용자 자세 유지를 고려한 무게 균형, 웨어러블 로봇의 무게가 미치는 영향에 관한 항목을 포함하였다.
효과성은 작업 시 로봇의 출력 적합성, 웨어러블 로봇이 감당할 수 있는 중량한계, 신체부담이 경감되는 정도, 작업물의 무게를 경감해 주는 정도의 총 4개 항목으로 구성하였다. 직관성은 웨어러블 로봇의 학습용이성과 기억용이성을 알아보기 위한 항목과 충전 방식, 조작방법, 로봇의 상태표시 등을 고려한 9개 관련 항목으로 구성하였다. 인터페이스 패널 가독성에 대한 항목과 사용자 의도파악에 관한 2개 항목이 포함되었고, 기억용이성과 관련된 평가항목은 Miller의 Magical Number를 참고하여 개발하였다. 제어안정성은 4개 항목으로 구성되었으며, 사용자의 기대에 부합하는 로봇의 움직임과 웨어러블 로봇의 이상동작으로 인한 착용자의 불안감에 초점을 맞추어 설문을 작성하였고, 이동 속도, 이동 거리, 시스템 재부팅, 로봇의 진동 등의 이상동작 혹은 돌발동작이 사용자가 생각하는 제어안전성에 미치는 영향을 알아보기 위한 항목을 포함하였다. 실용성은 웨어러블 로봇을 작업에 실제 사용할 수 있는 정도를 중심으로 작성하였고, 로봇의 동작 가용 시간, 작업 필요범위, 배터리 충전 시간, 부속 장치의 내구성, 작업물 취급 부위 형태를 알아보기 위한 5개 항목으로 구성하였다. 마지막으로 안전성은 근골격계질환을 예방하고 신체부담 작업을 지원하기 위한 산업용 상지 웨어러블 로봇의 역할과 관련된 8개 항목으로 구성되었다. 웨어러블 로봇을 착용하였을 때 우려되는 신체적 피해를 고려하여 로봇 구조체의 강도, 마감 처리, 열과 전자파에 관한 항목을 포함하였다. 또한 이상이 발생한 경우 긴급 중지방법과 과도한 동작범위에 관한 항목, 로봇의 노출된 케이블이 작업에 미치는 영향에 관한 항목을 포함시켰다.
본 연구에서는 인공지능 기술의 발전에 따라 산업현장에서 높은 활용도가 기대되는 산업용 웨어러블 로봇에 대한 표준화된 사용성 평가 기준을 개발할 필요가 있음에 주목하였다. 이에 따라 상지 웨어러블 로봇을 대상으로 사용성 평가요소와 평가항목을 제안하기 위한 연구과정을 진행하였다. 이 과정에서 기계 제품군으로서의 특성과 인공지능을 활용한 지능형 시스템의 특성을 모두 갖춘 웨어러블 로봇의 특성을 반영하여 사용성 평가요소를 구성하고자 노력하였다. 그 결과로 착용성, 효과성, 학습용이성, 효율성, 실용성, 안전성을 평가요소로 하는 사용성 평가방안을 도출하였다. 각 평가요소와 관련된 사용자 요구사항과 상지 웨어러블 로봇의 구조적 특성을 감안한 총 38개의 사용성 평가항목도 도출하였다.
기존 연구를 통해 다양한 형태를 지닌 웨어러블 인터페이스에 대한 6가지 기술적 요구사항이 정리된 바 있다(Cho, 2015). 본 연구에서는 웨어러블 로봇 관련 분야의 사용자 요구사항을 기반으로 사용성 구성요소에 따른 구체적인 정성적 평가항목을 제안하였고, 이들 항목을 활용하여 직접적인 사용성 평가를 실시할 수 있다는 점에서 의의가 있다. 웨어러블 로봇 팔에 대한 기존의 사용성 평가에서는 주로 작업 부하를 평가하는 표준화된 척도인 NASA-TLX 설문점수나 System Usability Sacle (SUS)과 같은 Self-reported Metric을 활용해왔다(Drohne et al., 2019; Meyer et al., 2019). 본 연구에서 제안한 정성적인 사용성 평가항목을 이용하여 Likert Scale 기반의 평가를 실시하면 사용자 요구사항의 충족 여부에 관한 더 세부적인 평가결과의 도출이 가능할 것이라 기대된다.
본 연구를 통해 제시된 웨어러블 로봇의 사용성 평가항목들은 평가요소별 사용자 요구조건을 기반으로 개발되었기 때문에 완제품에 대한 최종 평가 이외에도 개발과정에서 활용될 수 있다. 제품 설계과정에서 어떤 부분에 더 관심을 기울여야 인터랙션에 따른 사용자의 만족도를 제고시킬 수 있을지 생각할 기회를 제공한다는 점에서 의의가 있다. 착용성 평가항목들을 통해 확인할 수 있는 것처럼 웨어러블 로봇은 사용자의 신체적 특성에 적합한 구조로 설계되어야 하며, 신체 접촉으로 인해 불쾌감을 줄 수 있는 요인을 최대한 제거해야 함을 강조하였다. 작업 효과성 측면에서는 산업용 웨어러블 로봇의 주요 목적인 근골격계질환과 작업부담을 효과적으로 예방할 수 있는 기능을 갖추고, 작업 방식에 부합하는 로봇의 출력을 통해 작업을 효율적으로 도와줄 수 있도록 설계하였는지를 점검하도록 하였다. 또한, 사용자의 의사 결정에 따라 행동하는 로봇이기 때문에 직관적인 조작과 피드백이 이루어지지 않으면 사용자에게 큰 불편함을 초래할 수 있다는 것을 직관성 평가항목을 통해 점검하도록 하였으며, 로봇의 비정상 동작에 대한 불안감을 제거하기 위해서는 제어안정성의 확보가 필수적임을 인식하도록 하였다. 한편 착용성이 좋고 작업부담의 경감 효과가 뛰어나며, 제어안정성이 높더라도 동작에 제약이 따르면 실용성이 떨어져 사용을 기피하게 된다. 따라서 작업반경 내에서 움직임에 대한 제한이 없어야 하며, 작업에 대해 물리적이나 시간적으로 제한사항이 없도록 설계되었는지를 확인하도록 하였다. 마지막으로 산업용 상지 웨어러블 로봇의 사용성에 있어서 필수적으로 고려되어야 하는 사항은 안전성이다. 로봇을 직접적으로 착용함으로써 사용자는 다양한 위험에 노출될 수 있고 이를 근본적으로 제거하거나 발생 가능한 오류 확률을 최소로 하는 설계가 이루어졌는지를 사전에 평가해야 할 것을 강조하였다.
본 연구에서는 웨어러블 로봇이 아직 대중적 상용화 단계에 이르지 못해 직접적 사용자 경험을 기반으로 한 요구사항을 도출하기 어려웠다. 이를 해결하기 위해 웨어러블 로봇과 유사한 특성을 가진 보조공학기기, 보행보조기기와 웨어러블 디바이스에 대한 사용자 요구사항을 파악한 후 이를 기반으로 사용성 평가요소와 개별적 평가항목들을 도출하였다. Elnady et al. (2018)의 연구에서는 재활용 상지 웨어러블 로봇에 대한 사용자 요구사항을 조사한 후 로봇 개발자, 물리치료사, 직업치료사 등 관련 분야 전문가들을 대상으로 Focus Group Interview (FGI)를 실시하여 요구사항에 대한 타당성을 검증한 바 있다. 이번 연구에서 제시한 정성적 사용성 평가항목들은 선행연구를 기반으로 도출된 것이므로 추후 연구를 통해 산업용 웨어러블 디바이스를 착용하고 일한 경험이 있는 작업자, 로봇 개발자 등을 대상으로 FGI 통한 검증하는 과정이 필요하다. 또한 본 연구에서 제시한 정성적 평가항목을 중심으로 그 수준을 정량적으로 평가할 수 있는 측정지표와 기준을 설정하기 위한 연구를 진행할 필요가 있다.
References
1. Arthanat, S., Nochajski, S.M., Lenker, J.A., Bauer, S.M. and Wu, Y.W.B., Measuring Usability of Assistive Technology from a Multi-contextual Perspective: The Case of Power Wheelchairs, American Journal of Occupational Therapy, 63(6), 751-764, 2009.
Google Scholar
2. Ármannsdóttir, A.L., Beckerle, P., Moreno, J.C., van Asseldonk, E.H., Manrique-Sancho, M.T., del-Ama, A.J., Veneman, A.J. and Briem, K., Assessing the Involvement of Users during Development of Lower Limb Wearable Robotic Exoskeletons: A Survey Study. Human Factors, 0018720819883500, 2020.
3. Authayarat, W., Simsiri, P., Jermjerdphol, N. and Wongkrai, S., Designing Factors for Walking Aid Equipment in Thai Older Adults, Malaysian Journal of Public Health Medicine, 16(1), 29-35, 2016.
Google Scholar
4. Bae, S.H., A Study on Usability Evaluation of the Wearable Industrial Robots for Interacting with the Human Upper Extremities, Master dissertation, Kumoh National Institute of Technology, 2017.
5. Bostelman, R. and Hong, T., Test Methods for Exoskeletons - Lessons Learned from Industrial and Response Robotics, Wearable Exoskeleton Systems: Design, Control and Application, 13, 335-361, 2018.
Google Scholar
6. Cho, I.Y., Technology Requirements for Wearable User Interface, Journal of Ergonomics Society of Korea, 34(5), 531-540, 2015.
Crossref
Google Scholar
7. Choi, D.I., Usability Evaluation and Improvement Recommendation of Walking Assistance Device for the Elderly, Master dissertation, Ajou Uni., 2017.
Crossref
8. De Looze, M.P., Bosch, T., Krause, F., Stadler K.S. and O'Sullivan, L.W., Exoskeletons for Industrial Application and their Potential Effects on Physical Workload, Ergonomics, 59(5), 671-681, 2015. doi:10.1080/00140139.2015.1081988.
Google Scholar
9. Drohne, L., Nakabayashi, K., Iwasaki, Y. and Iwata, H., Design Consideration for Arm Mechanics and Attachment Positions of a Wearable Robot Arm, 2019 IEEE/SICE International Symposium on System Integration (SII), 645-650, 2019.
Google Scholar
10. Elnady, A., Mortenson, W.B. and Menon, C., Perceptions of Existing Wearable Robotic Devices for Upper Extremity and Suggestions for their Development: Findings from Therapists and People with Stroke, JMIR Rehabilitation and Assistive Technologies, 5(1), e12, 2018. doi:10.2196/rehab.9535
Google Scholar
11. Gemperle, F., Kasabach, C., Stivoric, J., Bauer, M. and Martin R., Design for Wearability, In Digest of Papers. Second International Symposium on Wearable Computers, 116-122, 1998.
Google Scholar
12. Hasegawa, Y. and Muramatsu, M., Wearable Lower-Limb Assistive Device for Physical Load Reduction of Caregiver on Transferring Support, In 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 1027-1032, 2013.
Google Scholar
13. Hong, J.P., Kwon, O.S., Lee, E.H., Kim, B.S. and Hong, S.H., A Study on the Controlling of Motorized Wheelchair using Non-vibration Joystick, Ergonomics Society of Korea, 145-149, 1997.
14. Hong, Y.H. and Jang, J.H., Technology Trends/Next Generation Wearable Robots, Expanding the Utilization Area based on the Wearer's Intentional Understanding Technology, Hello T, http://magazine.hellot.net/magz/article/articleDetail.do?flag=all&showType- =showType1&articleId=ARTI_000000000041743&articleAllListSortType=sort_1&page=1&selectYearMonth=201606&subCtgId (retrieved June, 2016).
15. HyundaiRotem Official Blog, https://blog.hyundai-rotem.co.kr/13 (retrieved June 30, 2017).
Crossref
16. HyundaiRotem Official Blog, https://blog.hyundai-rotem.co.kr/361 (retrieved October 10, 2019).
Crossref
17. ISO 9241-11, Ergonomics Requirements for Office Work with Visual Display Terminals (VDTs)-Part 11: Guidance on usability, https://www.iso.org/standard/16883.html (retrieved March, 1998).
18. Jia, Y., Wang, W., Wen, D., Liang, L., Gao, L. and Lei, J., Perceived User Preferences and Usability Evaluation of Mainstream Wearable Devices for Health Monitoring, PeerJ, 6, e5350, 2018.
Google Scholar
19. Jung, K.T., Shin, D.J., Chun, K.J., Won, B.H., Hong, J.S. and Kim, J.H., Anthropometric Analysis and Usability Evaluation of Four-wheeled Walker, Journal of the Ergonomics Society of Korea, 28(2), 17-26, 2009.
Google Scholar
20. Jung, M.Y., Kim, J.R., Yang., N.Y., Park, H.Y., Yoo, I.G. and Yeum, H.Y., A Survey of Actual Use and Demand of Assistive Technologies for People with Disabilities who not Received Assistive Technology Service at the Korea Employment Promotion Agency, Korean Society for Rehabilitation of Persons Disabilies, 13(2), 25-49, 2009.
21. Karabegovic, I. and Husak, E., The Fourth Industrial Revolution and the Role of Industrial Robots: A with Focus on China, Journal of Engineering and Architecture, 6(1), 67-75, 2018. doi: 10.15640/jea.v6n1a7.
Google Scholar
22. Kaewkannate, K. and Kim, S., A Comparison of Wearable Fitness Devices, BMC Public Health, 16(1), 433, 2016.
Crossref
Google Scholar
23. Kee, D.Y., Lee, G.T., Park, J.H. and Choi, G.I., Ergonomics for Industrial safety and Health Manager - 3rd Edition, Hankyungsa, 2011.
Crossref
24. Kim, G.Y., Kim, S.M. and Hyun, E.R., A Study on User Experience and Usability of Apple-Watch as Wearable Devices, The Korean Society of Science & Art, 21, 19-29, 2015.
25. Kim, G.A., User Responses Analysis of Wrist Wearable Devices, The Korean Society of Science & Art, 29, 13-22, 2017.
26. Kim, H.S., Koo, D.S., Nam, Y.J., Cho, K.J. and Kim, S.Y., Research on Technology Status and Development Direction of Wearable Robot, Fashion & Textile Research Journal, 21(5), 640-655, 2019. https://doi.org/10.5805/SFTI.2019.21.5.640.
27. Kim, S.Y., and Cho, K., Usability and Design Guidelines of Smart Canes for Users with Visual Impairments, International Journal of Design, 7(1), 2013.
Google Scholar
28. Kim, W.S., Lee, S.H., Yu, S.N., Han, J.S. and Han, C.S., Development of the Heavy Load Transferring Task- oriented Exoskeleton adapted by Lower Extremity using Quasi-active Joints, In 2009 ICROS-SICE, IEEE, 1353-1358, 2009.
Google Scholar
29. Knight, J.F., Baber, C., Schwirtz, A. and Bristow, H., The Comfort Assessment of Wearable Computers, In iswc, 2, 65-74, 2002.
Crossref
Google Scholar
30. Lam, R., Choosing the Correct Walking Aid for Patients, Canadian Family Physician, 53(12), 2115-2116, 2007.
Crossref
Google Scholar
31. Lee, H.D., You, S.N., Han, J.S. and Han, C.S., Development of the Operating Methodology of the Force Assistive Wearable Robot for Upper Limb, Proceedings of the Korean Society of Precision Engineering Conference, 37-38, 2007.
Google Scholar
32. Lee, H.J. and Oh, H.S., A Study on Wearable Device Fashion Products for the New Silver Generation -Focus on User Experience-, Archives of Design Research, 29(4), 99-107, 2016.
Google Scholar
33. Lee, S.H., Users' Satisfaction with Assistive Devices in South Korea, Journal of Physical Therapy Science, 26(4), 509-512, 2014.
Google Scholar
34. Marinov, B., Types and Classifications of Exoskeletons, Exoskeleton Report, 2015.
Crossref
35. Médéric, P., Pasqui, V., Plumet, F., Bidaud, P. and Guinot, J.C., Design of a Walking-aid and Sit to Stand Transfer Assisting Device for Elderly People, In 7th Int. Conference on Climbing on Walking Robots, 2004.
Google Scholar
36. Meyer, J.T., Schrade, S.O., Lambercy, O. and Gassert, R., User-centered Design and Evaluation of Physical Interfaces for an Exoskeleton for Paraplegic Users. 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), 1159-1166, 2019.
Google Scholar
37. Min, J.H., Kim, Y.W., Lee, S.I., Jang, T.W., Kim, I.N. and Song, J.C., The Fourth Industrial Revolution and Its Impact on Occupational Health and Safety, Worker's Compensation and Labor Conditions, Safety and Health at Work, 10(4), 400-408, 2019. https:// doi.org/10.1016/j.shaw.2019.09.005.
Google Scholar
38. Nielsen, J., Usability Engineering, Morgan Kaufmann, 1994.
Crossref
Google Scholar
39. O'Sullivan, L., Nugent, R. and van der Vorm, J., Standards for the Safety of Exoskeletons Used by Industrial Workers Performing Manual Handling Activities: A Contribution from the Robo-Mate Project to their Future Development, Procedia Manufacturing, 3, 1418-1425, 2015.
Google Scholar
40. Pamungkas, D.S., Caesarendra, W., Soebakti, H., Anaia, R. and Susanto, S., Overview: Types of Lower Limb Exoskeletons, Electronics, 8(11), 1283, 2019. https://doi.org/10.3390/electronics8111283.
Google Scholar
41. Preece, J., Rogers, Y. and Sharp, H., Interaction Design beyond Human-Computer Interaction 4th Edition, John Wiley & Sons Ltd, 19-33, 2015.
42. Rosen, J. and Perry, J.C., Upper Limb Powered Exoskeleton, International Journal of Humanoid Robotic, 4(3), 529-548, 2007.
Google Scholar
43. Spada, S., Ghibaudo, L., Gilotta, S., Gastaldi, L. and Cavatorta, M.P., Investigation into the Applicability of a Passive Upper-limb Exoskeleton in Automotive Industry. Procedia Manufacturing, 11, 1255-1262, 2017.
Google Scholar
44. Zacharias, I.C.S., Campese, C., dos Santos, T.B., da Cunha, L.P. and Costa, J.M.H., User Stories Method and Assistive Technology Product Development: A New Approach to Requirements Elicitation, In Proceedings of the Design Society: International Conference on Engineering Design, 1(1), 3781-3790, 2019.
Google Scholar
PIDS App ServiceClick here!