eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Jun Kee Hong
, La Hyun Lee
, Hyung Seok Oh
, Yong Deok Yun
, Rohae Myung
10.5143/JESK.2020.39.3.179 Epub 2020 July 05
Abstract
Objective: The aim of this study is to investigate the effects of information level on takeover performance and workload in conditionally autonomous driving (CAD).
Background: Takeover Request (TOR) is important in conditionally autonomous driving (CAD) while driver must drive in certain situations. A driver receives help from the information given by the car when TOR is given. It is known that specific information helps driver more effectively than simple signals. However, information level may affect the driver's takeover performance and the workload. So, investigating takeover performance and workload in takeover situation is necessary. This paper focuses on the optimal level of information for takeover performance.
Method: To investigate the effects of information level on takeover performance and workload in CAD, an experiment on the takeover situation using a driving simulator was designed. The required information for takeover was extracted through a prior survey and the information level was distinguished. In the scenarios with six information levels, participants deal with takeovers. During the experiments, takeover performance was measured by hands-on-time and distance to obstacle, and workload was measured by DALI (Driving Activity Load Index) and PCPS (Percent Change of Pupil Size).
Results: Takeover performance was reduced when the level of information was too low or too high. The takeover time measured through hands-on-time showed no significant difference when the level is too low or too high. Takeover performance, measured by the distance to obstacles, decreased and showed a significant difference when the level is too low or too high. For subjective workload, there was no significant difference when the level is too low or too high. Subjective workload was measured by DALI. For objective workload, there was no significant difference. Objective workload was measured by PCPS.
Conclusion: Takeover performance measured by the distance to obstacles tend to decrease when the information level is too low or too high. Therefore, it is important to provide an appropriate level of information in the case of takeovers.
Application: Through this paper, providing an appropriate level of information is more effective for takeover in CAD. Therefore, it will be used to reduce risk of accidents in design of TOR displays in conditionally autonomous driving vehicles in the future.
Keywords
Conditionally Autonomous Driving (CAD) Takeover Takeover Request (TOR) Information level Takeover performance Workload
최근 자율주행 자동차 개발과 연구가 활발히 진행되고 있다. 자율주행 자동차는 교통 사고, 교통 체증, 환경 오염 등 자동차가 가지고 있는 문제점들을 해결해 줄 수 있다는 점에서 많은 관심을 받고 있다(Cho et al., 2013; Singh, 2018; Schrank et al., 2012). 하지만, 현재 개발되고 있는 자율주행 시스템은 모든 상황에 대한 대처가 불가능 하며, 시스템이 대처할 수 없는 특정 상황에 대해 운전자는 제어권을 인계 받아 운전을 해야 한다. 이러한 상황을 제어권 전환(Takeover)이라고 하며, 자율주행 시스템은 제어권 전환 알림(Takeover Request)을 통하여 운전자에게 제어권 전환을 요청한다.
특히, 조건부 자율주행(Conditionally Autonomous Driving; SAE International, 2016)에서 운전자는 운전 및 모니터링에 대한 의무가 없다. 조건부 자율주행 중 운전자는 스마트폰 사용, 독서, 영화 시청 등 운전과 관련 없는 활동(Non-Driving Related Task; NDRT)을 수행할 것이다(Marinik et al., 2014). 하지만 운전자의 개입이 필요한 불완전한 자율주행 상황에서 운전자가 NDRT에 극도로 몰입하게 되면 제어권 전환 요청에 반응하지 못하여 큰 사고로 이어질 수 있다. 또한, 제어권 전환 요청에 반응을 하더라도 운전 상황에 대한 인지가 부족하다면 상황에 대처하기 위한 적절한 행동을 수행하지 못할 것이다.
따라서, 안전한 제어권 전환을 위해서는 적절한 시간에 적절한 방식으로 운전자에게 알림을 주는 것이 필요하다. 지금까지의 연구에 따르면 정보가 결여된 채 제어권 전환만을 요청하는 알림보다 구체적 정보를 포함하는 알림이 제어권 전환 수행 능력에 긍정적인 영향을 미치는 것을 알 수 있다(Forster et al., 2017; Politis et al., 2015). Forster et al. (2017)가 진행한 실험에서는 단순하게 제어권 전환 알림을 주는 경우와 음성으로 구체적 정보를 제시하는 경우 간의 비교가 이루어졌는데, 운전 상황으로 시선이 이동하는 시간에서는 두 경우에 차이가 없었지만 실제 운전에 접어드는 데에서는 청각적으로 구체적 정보를 제시한 경우가 단순 제어권 전환 알림을 준 경우보다 더욱 빠른 반응 속도를 보였다. 또한, 청각적 정보에 대한 주관성 평가에서도 구체적인 정보를 주는 경우가 제어권 전환에 훨씬 더 도움이 되었다는 결과가 나왔다. Lau et al. (2018)은 동일한 청각 정보에서 시각 정보의 구체성 유무를 통해 운전자의 운전 수행 능력을 측정하였는데 처음 핸들을 잡는 시간과 처음 핸들을 조작하는 시간을 비롯한 지표에서 유의미한 차이를 기록하였다. 주관성 평가에서도 구체성이 반영된 디스플레이가 유의미한 차이는 아니었지만 사용 조작성에서 더 높은 수치를 기록하였다.
제어권 전환에 관한 정보는 환경, 위험, 상황 등에 대한 내용을 포함하는데, Richardson et al. (2018)에 따르면 제어권 전환 정보 중 시간에 대한 정보가 거리에 대한 정보에 비해 유용성과 만족도에서 높은 수치를 기록했으며 Kim et al. (2019)에 따르면 상황인식정보와 의사결정정보는 모두 안전감, 인지부하, 신뢰도에 긍정적인 영향을 나타냈다. 또 Politis et al. (2013)에 따르면 알림이 단일 감각에 의해 전달될 때 보다는 복수 감각에 의해 전달될 때 더욱 효과적인 것으로 나타났다. 이들은 시각적, 청각적, 촉각적 알림을 조합해서 전달했을 때 더 빠르고 정확한 반응이 나왔음을 밝혀냈다. 또한 Wright et al. (2018)에 따르면 어떤 위험요인이 있을 것에 대한 정보보다는 제어권 전환 시 주변 환경에 대한 정보가 운전자의 제어권 전환 수행 능력에 더 유의미한 효과가 있음을 알 수 있었다. 위의 선행 연구들을 통해, 제어권 전환 시 운전자에게 다양한 감각을 통해 추가적인 정보를 전달하는 것이 제어권 전환 수행에 도움이 되며 정보에 따라 그 효과가 다름을 알 수 있었다.
앞서 말했듯이 조건부 자율주행에서는 제어권 전환을 받은 운전자가 상황에 대해 적절히 판단 후 행동해야 한다. 자동차 운전의 경우 안전이 매우 중요하고 제어권 전환 시 운전자의 상황 판단과 행동 선택은 안전과 직결되므로 적절한 정보를 제공함으로써 운전자가 운전 상황에 대해 빠른 시간 안에 파악하게 하여 제어권 전환에 도움을 주어야 한다. 만약 제어권 전환 시 주어지는 정보가 부족하면 운전자가 직접 운전 상황을 확인해야 하므로 운전자의 제어권 전환 수행 능력이 저하될 수 있다. 또한, 정보가 너무 많을 경우에도 정보를 확인할 때의 신뢰도가 떨어지고 과제 수행 능력이 감소하므로 운전자의 제어권 전환 수행 능력에 악영향을 미칠 것이다(Marusich et al., 2016).
Park (2017)에 따르면 첨단운전지원시스템을 통한 제어권 전환에서 성공적인 전환이 이루어지기 위해서는 상황에 대한 개입이 효과적으로 이루어지게 하는 디스플레이의 설계가 필요하다. 기존에 이루어진 연구들은 제어권 전환 관련 정보의 유무에 따른 제어권 전환 수행 능력 비교는 포함하고 있으나, 제공되는 구체적 정보의 양에 따른 운전자의 제어권 전환 수행 능력 비교를 포함하지는 않았다. 제어권 전환 상황에서 작업부하가 너무 낮거나 높으면 운전자의 안전을 위협할 수 있는 만큼 적절한 정보가 제공되어야 효과적으로 제어권 전환을 할 수 있을 것이다. 특히 운전에서의 상황 판단은 시각적 정보에 크게 의존하는 만큼 적절한 시각적 정보 수준에 대한 연구가 필요하다. 따라서 본 논문에서는 제어권 전환 시 제어권 전환 알림에 표시되는 시각적 정보의 양이 운전자의 제어권 전환 수행 능력 및 작업부하에 어떠한 영향을 미치는지 확인하는 연구를 진행할 것이다.
2.1 Participants
운전 면허를 소지한 실험 참가자 15명(남자 11명, 여자 4명)을 모집하여 실험을 진행하였다. 참가자들의 연령은 20세에서 33세 사이(평균 25.3세, 표준편차 3.5세)였으며, 시력 혹은 교정시력은 정상이었다. 실험 시작 전, 참가자들은 실험에 대한 자세한 설명을 듣고 실험 참가 동의서를 작성하였다. 실험 참여는 자발적으로 이루어졌으며, 참가자들에게 실험 참가비로 20,000원의 사례비를 지급하였다.
2.2 Apparatus
실험은 OpenDS 4.5 운전 시뮬레이터를 통해 진행되었다. 참가자들은 Logitech G25 핸들 · 페달 · 컨트롤러를 통해 운전 과제를 수행했으며, iPad pro를 통해 '2048 game' NDRT를 수행했다. 실험을 수행하는 동안 운전자의 시각적 움직임을 측정하기 위하여 Pupil Core Eye Tracker를 사용했다.
2.3 Quantification of takeover information
제어권 전환 상황에서 필요한 정보를 추출하기 위해서 사전에 설문조사를 진행하였다. 설문조사는 총 59명을 대상으로 진행하였으며, 제어권 전환이 발생할 수 있는 여러 상황들을 대처하기 위해 필요한 정보가 무엇인지 조사했다. 그 결과 제어권 전환 요청, 현재 속도, 남은 시간, 주변 차량 존재 여부, 앞 차와의 거리, 필요한 행동 요령의 6가지가 제어권 전환 상황에서 필요한 정보임을 알 수 있었다.
(Table 1)는 제어권 전환 정보에 대한 중요도를 나타낸 표이다. 각 정보는 1~3단위의 중요도를 가진다. 중요도의 단위는 해당 정보가 운전자에게 노출될 확률이 적거나 일반적이지 않고 판단이 필요한 정보일수록 높게 설정하였다. 현재 속도는 가장 기본적인 정보이고 노출이 쉬운 정보이기 때문에 중요도를 '1'로 설정하였다. 교통 상황에 따라 주변 차량의 존재 여부와 앞 차와의 거리는 달라질 수 있다. 따라서, 일반적인 정보들보다 정보 전달에 의한 효과가 크다고 생각하여 중요도를 '2'로 설정하였다. 마지막으로, 제어권 전환 요청, 제어권 전환까지 남은 시간, 그리고 필요한 행동요령은 제어권 전환이라는 일반적이지 않은 상황에 대한 정보이므로 제어권 전환 정보 중 중요도를 '3'으로 설정하였다.
|
Takeover information |
Takeover |
Current |
Remaining |
Traffic |
Distance |
Required |
|
Importance |
3 |
1 |
3 |
2 |
2 |
3 |
각 정보들을 조합하여 제어권 전환 알림에서 표시할 시각적 정보의 중요도에 대한 수준을 분류하였다. 제어권 전환 알림은 제어권 전환을 나타내는 가장 기본적인 정보이므로 모든 수준에 포함하였고 현재 속도의 경우 기존 자동차 클러스터에 표시되는 정보이므로 마찬가지로 모든 수준에 포함하였다. 다른 정보들의 경우 제어권 전환 상황에서 보조적인 역할을 하므로 그 중요도에 따라 순차대로 조합하였다. 그 결과(Table 2)과 같이 정보의 수준이 6 단계로 구분되었다. 단계가 올라갈수록 중요도가 증가하도록 정보 수준을 결정하였으며, 정보 수준에 따라 제어권 전환 정보를 운전자에게 제공하여 제어권 전환 수행 능력을 평가하는 실험을 진행했다.
|
|
|
Total |
||||||
|
정보 수준(Information
level) |
Level 1 |
Takeover |
Current |
|
|
|
|
4 |
|
Level 2 |
Takeover |
Current |
Remaining |
|
|
|
7 |
|
|
Level 3 |
Takeover |
Current |
Remaining |
Distance |
|
|
9 |
|
|
Level 4 |
Takeover |
Current |
Remaining |
|
Required |
|
10 |
|
|
Level 5 |
Takeover |
Current |
Remaining |
Distance |
Required |
|
12 |
|
|
Level 6 |
Takeover |
Current |
Remaining |
Distance |
Required |
Traffic |
14 |
|
2.4 Driving scenario
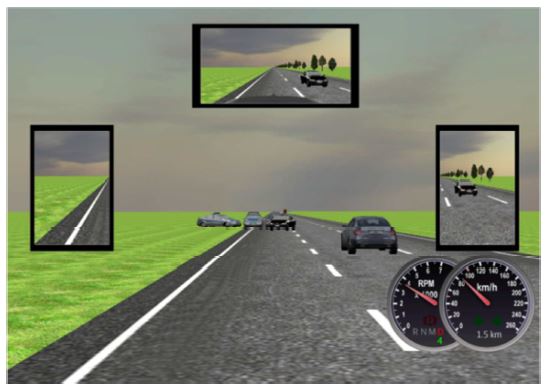
주행 시나리오는 실험 시나리오와 실험 참가자의 학습 효과를 제거하기 위한 더미 시나리오로 구분했다. 모든 시나리오에서 참가자는 자율주행 중 제어권 전환 알림이 발생함에 따라 제어권 전환 과제를 수행해야 한다. 먼저 실험 시나리오에서 참가자는 제어권 전환 후 주행 차로에 나타나는 장애물을 회피하는 과제를 수행한다(see Figure 1). 시나리오에서 자율주행 자동차는 3차선 도로를 주행하며, 각 실험마다 주행 차로, 주변 차량, 그리고 장애물의 종류를 무작위로 변화시켰다. 더미 시나리오는 참가자가 모든 주행 시나리오를 장애물 회피라고 여기고 제어권 전환 정보들을 무시하는 것을 방지하기 위해 설계하였다. 더미 시나리오에서는 옆 차선에서 끼어드는 차량으로 인해 제어권 전환 알림이 발생하며, 이에 따라 참가자는 제어권을 인계 받아 상황에 대처한다.
2.5 Experimental design
정보 수준(Information Level)에 따른 운전자 제어권 전환 수행 능력을 측정하기 위해 정보 수준을 독립변수로 설정하였다. 모든 시나리오에서 제어권 전환 요청 시기는 장애물에 도달하기 7초 전으로 동일하게 부여하였으며, 참가자는 6번의 실험 시나리오와 3번의 더미 시나리오를 포함하여 총 9번의 실험을 수행한다. 실험 시나리오는 6가지의 정보 수준을 모두 포함하며 더미 시나리오에서의 제어권 전환 정보 수준은 (Table 2)의 Level 3로 일정하게 부여하였다. 실험에서 정보 수준 및 시나리오의 순서는 무작위로 배치하였다.
운전 과제와 더불어 조건부 자율주행 상황을 가정하기 위하여 참가자들에게 NDRT를 수행하도록 실험을 설계하였다. 조건부 자율주행에서 운전자는 수동 운전 및 모니터링의 의무가 없으므로 시각적 주의를 운전 상황에서 벗어나도록 할 수 있는 과제를 NDRT로 선정하였다. NDRT는 '2048 game'을 수행했으며, NDRT의 수행 능력은 별도로 측정하지 않았다(see Figure 2).

제어권 전환에 대한 정보는 디지털 클러스터를 통해 제공하였으며, Figure 3의 디지털 클러스터는 6단계 정보 수준을 나타낸다. 디지털 클러스터는 기존 차량의 계기판 위치에 표시하였으며, 제어권 전환 알림이 발생하게 되면 운전자는 디지털 클러스터에 나타나는 정보를 파악하고 상황에 맞게 반응해야 한다.

2.6 Dependent variable
정보 수준에 따른 운전자 제어권 전환에 대한 수행 능력을 측정하기 위해 종속변수로 운전대를 손을 올리는 시간(Hands-on-Time; Gold et al., 2013), 운전자가 차선 이동을 시작했을 때, 장애물 차량과 떨어진 거리(Distance of lane change to the maneuver limit point; Langlois and Soualmi, 2016)를 측정하였다. 또한 작업부하 측정을 위해 DALI (Driving Activity Load Index; Pauzié, 2008)와 동공 크기 변화율(Percentage change in pupil size; Katidioti et al., 2016)을 이용하였다. 주관적 작업부하 측정법인 DALI에서는 운전 상황에서의 작업부하를 측정하기 위한 방법으로 NASA-TLX의 세부 항목들을 운전 상황에 맞게 수정하였다. DALI의 세부 항목은 주의 노력, 시각적 요구, 청각적 요구, 시간적 요구, 간섭, 상황적 스트레스로 구성되어 있으며, 이를 통해 운전자의 주관적 작업부하를 측정하였다. DALI 이외에도 객관적 작업부하 측정을 하기 위해 동공 크기 변화율을 사용하였다. 동공 크기 변화율을 측정하는 식은 (1)과 같다.
Percent Change in Pupil Size (PCPS) = (Current pupil dilation - baseline)/baseline (1)
2.7 Procedure
먼저, 실험 참가자는 실험에 대한 설명을 듣고 연구 동의서를 작성한다. 실험에 대해 충분히 숙지가 된 피실험자를 운전대에 앉아 Eye Tracker를 착용하고 정확한 측정을 위해 장비를 조정(calibration)하는 작업을 거친다. 본격적인 실험에 앞서 연습을 통해 참가자가 수동 주행, NDRT, 그리고 자율주행 상황에 대해 익숙해지는 시간을 가진다. 마지막으로 설명을 통해 제어권 전환이 어떻게 이루어지는지, 디지털 클러스터에 어떤 정보가 제공되는지를 알려주고 첫 번째 실험을 진행한다. 참가자들은 각 실험이 끝나면 DALI 설문지를 작성하고, 설문 작성이 완료되면 다음 실험을 반복하여 총 9번의 실험을 수행한다.
3.1 Takeover time
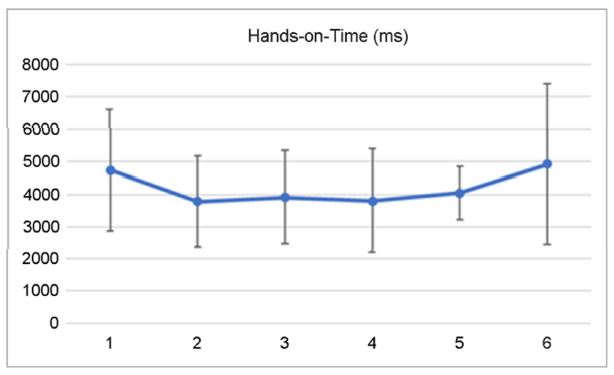
제어권 전환 시간은 운전자가 핸들에 손을 가져가는 시간(Hands-on-Time)을 통해서 측정하였다. 각 정보 수준에 따라 제어권 전환 시간이 유의미한 차이가 있는지 확인하기 위해 사고를 일으킨 운전자를 제외한 9명의 참가자에 대해 분산 분석을 진행하였다. Figure 4을 보면, 그래프는 U자 형태를 보인다. 하지만 분산 분석 결과, 제어권 전환 알림에서 표시되는 시각적 정보 수준에 따른 Hands-on-Time은 유의미한 차이가 없었다(F(5,48) = 0.7198, p-value = 0.6118).
3.2 Takeover performance
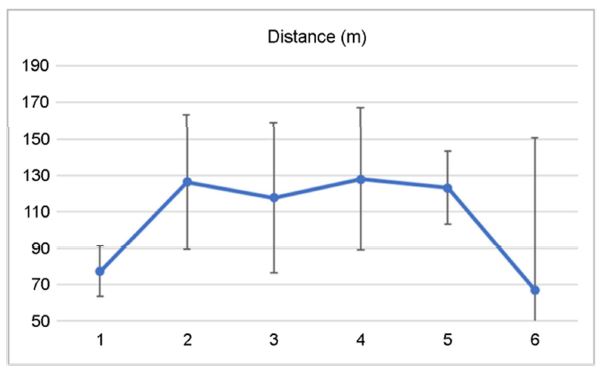
제어권 전환 수행 능력은 운전자가 제어권 전환을 했을 때, 장애물과의 거리가 얼마나 떨어져 있는지를 측정하여 확인하였으며, 이는 Figure 5에 나타냈다. 정보 수준에 따라 제어권 전환 수행 능력이 유의미한 차이가 있는지 확인하기 위해 사고를 일으킨 운전자를 제외한 9명의 참가자에 대해 분산 분석을 진행하였다. 분산 분석 결과, 제어권 전환 알림에서 표시되는 시각적 정보 수준에 따른 제어권 전환 수행 능력은 유의미한 차이를 보였다(F(5,48) = 2.901, p-value = 0.0229). 추가적으로 LSD 다중 비교 분석을 통해 사후 분석을 진행하였다. 사후 분석 결과, 1단계와 6단계가 동일 그룹으로 묶였으며, 나머지 2, 3, 4, 5단계가 동일 그룹을 형성하였다.
3.3 Workload
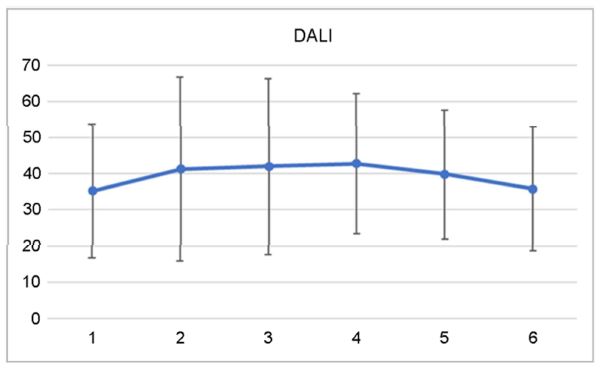
본 실험에서는 주관적 측정 방법인 DALI와 객관적 측정 방법인 동공 크기 변화(Percent Change in Pupil Size)를 통해 실험 참가자의 작업부하를 측정하였으며, 이는 Figure 6에 나타냈다.
먼저, DALI를 통해 제어권 전환 시 제공되는 정보 수준에 따라 운전자의 작업부하가 어떻게 변화하는지 확인하기 위해 사고를 일으킨 운전자를 제외한 9명의 참가자에 대해 분산 분석을 진행했다. 분산 분석 결과, 정보 수준은 운전자의 주관적 작업부하에 유의미한 영향이 미치지 않았다(F(5,48) = 0.1940, p-value = 0.9634).
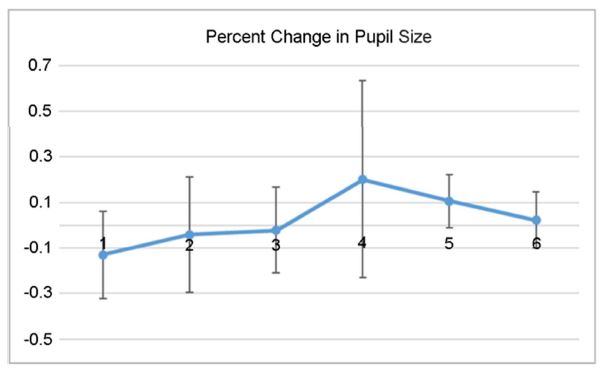
본 실험에서는 동공 크기 변화를 통해서도 제어권 전환 시 제공되는 시각적 정보가 작업부하에 미치는 영향을 확인해보았다. 동공 크기 변화율에 대한 통계 분석은 사고를 일으킨 참가자와 동공이 측정되지 않은 참가자들을 제외하여 진행했다. 그 결과는 아래 그래프(see Figure 7)와 같다. 정보 수준에 따라 동공 크기의 변화는 유의미한 차이가 없었다(F(5,32) = 1.278, p-value = 0.2977).
본 연구는 조건부 자율주행에서의 제어권 전환 시 운전자의 제어권 전환 수행에 있어서 최적의 정보 수준을 알아보기 위해 진행되었다. 운전 시뮬레이터를 이용해 진행된 실험에서 시각적 정보 수준은 제어권 전환 수행 능력에 일부 유의미한 영향을 미치는 것으로 나타났다. 특히 정보 수준이 가장 많은 6단계에서 수행 능력이 감소했는데, 이것은 주변 자동차에 대해 인식을 더 많이 해야 하는 상황에서 제어권 전환 시간이 늘어났다는 선행 연구 결과와 같음을 확인할 수 있었다(Radlmayr et al., 2014). 작업부하의 경우, DALI를 사용한 주관적 평가에서는 유의미한 차이가 나타나지 않았음을 확인할 수 있었다. 본 실험에서는 작업부하의 객관적 측정을 위해 제어권 전환 요청이 발생하고 디스플레이를 보는 시간 동안 일반적인 상황에 비해 동공의 크기가 얼마나 변화했는지 측정하였다. 제어권 전환 상황 동안 운전자에게 주어지는 작업부하가 높았다면 동공의 크기가 줄어들어 변화율이 음수 값을 기록했을 것이고 작업부하가 높지 않았다면 동공의 크기가 늘어나 변화율이 양수 값을 기록했을 것이다. 실험 결과 통계적으로 유의미하지 않은 것으로 보아 표시된 정보 수준이 작업부하에는 영향을 끼치지 못했음을 알 수 있었다.
정보 수준의 단계별 제어권 전환 수행 능력을 Distance를 통해 살펴보면 1단계와 6단계가 같은 그룹으로, 2, 3, 4, 5단계가 같은 그룹으로 묶임을 확인할 수 있었다. 2, 3, 4, 5단계의 경우 정보 수준이 7~12에 이르는 단계들로 남은 시간에 대한 정보가 공통적으로 들어가 있고 앞 차와의 거리와 필요 행동이 선택적으로 들어가 있는데 네 단계의 수행 능력 차이가 크지 않은 것으로 미루어 보아 제어권 전환 시에는 남은 시간에 대한 정보가 앞차와의 거리와 필요 행동 정보에 비해 더 효과적인 것으로 보인다. 이것은 시간에 대한 정보가 주관적 작업부하 평가에서 유용성이 높다는 기존 연구 결과와 맥락을 같이 한다(Richardson et al., 2018).
Distance는 정보 수준의 1, 6단계에서 유의미하게 감소했지만 Hands-on-Time은 유의미한 차이를 보이지 않았는데, 이 결과는 운전자가 제어권 전환 상황에서 반사적으로 반응하는 것과 실제 운전을 수행하는 것 사이에는 차이가 있을 수 있다는 이전 연구 결과와 같음을 확인할 수 있다(Zeeb et al., 2016). Distance를 통해 보자면 제공되는 정보가 너무 적거나 많은 경우 운전자가 제어권 전환 정보로부터 얻을 수 있는 이익이 적어 실제 전환 속도와 수행 능력에 영향을 끼쳤을 것이다. 제어권 전환 정보 수준이 낮을 경우, 실제 시뮬레이션 상황에서 운전자가 직접 정보를 수집하고 상황을 해석하여 반응해야 한다. 이와 다르게 정보가 너무 많을 경우, 디스플레이를 확인하는 시간이 너무 길어져서 오히려 운전 상황에 반응하는 시간이 늦어져 제어권 전환 시간 및 수행 능력에 악영향을 미쳤을 것이다.
마지막으로, 본 연구에서는 제어권 전환 알림에서 제공하는 정보 수준에 따른 작업부하를 측정하였다. 많은 연구에서 작업부하의 측정 도구로 NASA-TLX 등의 주관성 평가를 활용하였던 것처럼 본 실험에서도 주관적 측정 방법인 DALI를 통해 작업부하를 측정하였다. 측정 결과, 유의미한 차이가 발견되지 않았는데 이는 운전자가 실제로 제어권 전환을 받을 때에는 본인이 운전 상황을 직접 보고 판단하는 것에 의존하기 때문인 것으로 보인다. 이는 Kim et al. (2019)가 NASA-TLX를 통해 진행한 실험 결과와는 다른데 이는 추후 연구에서 다른 시점에서의 주관적 평가를 실시하거나 안전감 측정 등의 다른 주관적 평가를 추가로 실시해야 함을 시사한다. 또한, 작업부하에 대한 주관적 평가의 경우 하나의 운전 시나리오가 완전히 종료된 후 제어권 전환 상황에 대한 기억에 의존하여 평가를 진행해야 했기 때문에, 제어권 전환 정보에 의한 작업부하만을 나타내기에는 한계가 있었다. 따라서 본 연구에서는 동공 크기 변화율을 통해 추가적으로 작업부하를 측정하였다. 동공 크기 측정의 경우 정보 수준이 4단계와 5단계일 때 상대적으로 높은 값을 기록하였지만 통계적으로 유의미한 차이를 보이지 않았다. 하지만 상황에 따른 눈꺼풀의 움직임과 눈알 위치의 변화 등의 이유로 모든 데이터가 정확하게 수집되지는 못했고 이에 따라 적은 수의 표본 만으로 변화 측정이 진행되어 결과에 영향이 있었다. 따라서 더 많은 표본에 대해 정확한 측정을 통한 추가적인 연구가 필요하다. 또한, 추후 연구에서는 Carsten et al. (2012)에서 사용한 심장 박동수 측정 등과 같은 다른 객관적 작업부하 측정 방법도 추가적으로 사용해볼 필요가 있다.
조건부 자율주행에서는 특정 상황에서 운전자에게 제어권이 전환되는 만큼 해당 시점에서의 운전자와 자동차 간 적절한 소통이 필요하다. 안전과 직결된 제어권 전환 상황에서 운전자는 자동차가 전달하는 정보를 통해 성공적으로 제어권 전환을 해내야 한다. 따라서 본 연구에서는 제어권 전환 시 제공되는 시각적 정보 수준에 따른 제어권 전환 수행 능력과 작업부하 변화를 살펴봤으며, 수행 능력은 Hands-on-Time과 장애물까지 남은 거리 측정을 통해, 작업부하는 주관적 측정과 동공 크기 변화율 측정을 통해 도출했다. 측정 결과를 통해 보았을 때, 측정 방법에 따라 결과가 달랐는데 Hands-on-Time 측정에서는 유의미한 차이가 보이지 않았던 반면 장애물까지 남은 거리 측정에서는 정보 수준이 극도로 높거나 낮을 때 제어권 전환 수행 능력이 감소함을 알 수 있었다. 이는 운전자가 정보와는 관계없이 신호에 따라 반응하였고 실제 수행 능력과 Hands-on-Time 사이에는 관계가 크게 없음을 의미한다. 작업부하는 주관적 측정과 동공 크기 변화율 모두에서 유의미한 차이를 보이지 않았다. 이를 통해 제어권 전환 시 제공되는 정보 수준이 적절할 때 NDRT를 수행하던 운전자가 수월하게 제어권 전환에 임했음을 알 수 있었다. 이는 더 나아가 조건부 자율주행에서 제어권 전환 시에는 전환 후 사고 방지를 위해 적절한 양의 정보를 제공해야 한다는 점을 시사한다. Epple et al. (2018)의 연구에 따르면 복합 감각의 제어권 전환 요청에서는 시각적 메시지의 효과가 청각적 메시지에 비해 떨어짐을 알 수 있는데 본 연구에서는 시각적 정보 수준에 대한 비교만 진행되었으므로 추후 연구에서는 다른 감각에서의 정보 수준에 따른 수행 능력 측정이 필요하다. 실제 도로에서는 더욱 다양한 상황에서 각각 다른 판단을 필요로 하므로 상황에 따라 다른 피드백 디자인의 설계가 추후 연구에 필요할 것이다. 또한, 본 실험은 시뮬레이터를 이용한 실험인 만큼 실제 운전 상황에서의 운전자의 행동을 관찰하기 위해서는 실제 도로 상황에서의 실험이 필요해 보인다.
References
1. Cho, H.S., Lee, D.M. and Kim, Y.C., 2010 Traffic Congestion Costs: Estimation and Trend Analysis, The Korea Transport Institute (KOTI) Research Report 1-102, 2013.
2. Carsten, O., Lai, F.C., Barnard, Y., Jamson, A.H. and Merat, N., Control task substitution in semiautomated driving: Does it matter what aspects are automated?. Human Factors, 54(5), 747-761, 2012.
Google Scholar
PubMed
3. Epple, S., Roche, F. and Brandenburg, S., The sooner the better: Drivers' reactions to two-step take-over requests in highly automated driving. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 62(1), 1883-1887, 2018.
Google Scholar
4. Forster, Y., Naujoks, F., Neukum, A. and Huestegge, L., Driver compliance to take-over requests with different auditory outputs in conditional automation. Accident Analysis & Prevention, 109, 18-28, 2017.
Google Scholar
5. Gold, C., Damböck, D., Lorenz, L. and Bengler, K., "Take over!" How long does it take to get the driver back into the loop?. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Vol. 57, No. 1, pp. 1938-1942). Sage CA: Los Angeles, CA: SAGE Publications, 2013.
Google Scholar
6. Katidioti, I., Borst, J.P., Bierens de Haan, D.J., Pepping, T., van Vugt, M.K. and Taatgen, N.A., Interrupted by your pupil: An interruption management system based on pupil dilation. International Journal of Human-Computer Interaction, 32(10), 791-801, 2016.
Google Scholar
7. Kim, J., Lee, K. and Byun, Y., Effects of Situation Awareness and Decision Making on Safety, Workload and Trust in Autonomous Vehicle Take-over Situations. Journal of the HCI Society of Korea, 14(2), 21-29, 2019
Google Scholar
8. Langlois, S. and Soualmi, B., Augmented reality versus classical HUD to take over from automated driving: An aid to smooth reactions and to anticipate maneuvers. In 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC) (pp. 1571-1578). IEEE, 2016.
Google Scholar
9. Lau, C.P., Harbluk, J.L., Burns, P.C. and El-Hage, Y., The influence of interface design on driver behavior in automated driving. Victoria, BC: CARSP, 2018.
Google Scholar
10. Marinik, A., Bishop, R., Fitchett, V., Morgan, J., Trimble, T. and Blanco, M., Human factors evaluation of level 2 and level 3 automated driving concepts. National Highway Traffic Safety Administration, Washington, DC, 2014.
Google Scholar
11. Marusich, L.R., Bakdash, J.Z., Onal, E., Michael, S.Y., Schaffer, J., O'Donovan, J., Hollerer, T., Buchler, N. and Gonzalez, C., Effects of information availability on command-and-control decision making performance, trust, and situation awareness. Human Factors: The Journal of the Human Factors and Ergonomics Society, 58(2), 301-321, 2016.
12. Park, J., A Review on the Transitions of Control Authority in Advanced Driver Assistance Systems (ADAS). Journal of the Ergonomics Society of Korea, 36(6), 665-675, 2017.
Google Scholar
13. Pauzié, A., A method to assess the driver mental workload: The driving activity load index (DALI). IET Intelligent Transport Systems, 2(4), 315-322, 2008.
Crossref
Google Scholar
14. Politis, I., Brewster, S. and Pollick, F., To beep or not to beep?: Comparing abstract versus language-based multimodal driver displays. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems (pp. 3971-3980). ACM, 2015.
Google Scholar
15. Politis, I., Brewster, S. and Pollick, F., Evaluating multimodal driver displays of varying urgency. In Proceedings of the 5th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 92-99). ACM, 2013.
Google Scholar
16. Radlmayr, J., Gold, C., Lorenz, L., Farid, M. and Bengler, K., How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. In Proceedings of the Human Factors and Ergonomics Society 58th annual Meeting, 58(1), 2063-2067, 2014.
Google Scholar
17. Richardson, N., Flohr, L. and Michel, B., Takeover Requests in Highly Automated Truck Driving: How Do the Amount and Type of Additional Information Influence the Driver-Automation Interaction? Multimodal Technologies and Interaction, 2(4), 68, 2018.
Google Scholar
18. SAE International., Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. (J3016_201609). Warrendale, PA: Author, 2016.
19. Schrank, D., Eisele, B. and Lomax, T., TTI's 2012 urban mobility report. Texas A&M Transportation Institute. The Texas A&M University System, 4, 2012.
Crossref
Google Scholar
20. Singh, S., Critical reasons for crashes investigated in the National Motor Vehicle Crash Causation Survey (Traffic Safety Facts Crash · Stats. Report No. DOT HS 812 506). Washington, DC: National Highway Traffic Safety Administration. 2018.
Crossref
Google Scholar
21. Wright, T.J., Agrawal, R., Samuel, S., Wang, Y., Zilberstein, S. and Fisher, D.L., Effective cues for accelerating young drivers' time to transfer control following a period of conditional automation. Accident Analysis & Prevention, 116, 14-20, 2018.
Google Scholar
22. Zeeb, K., Buchner, A. and Schrauf, M., Is take-over time all that matters? The impact of visual cognitive load on driver take-over quality after conditionally automated driving. Accident Analysis and Prevention, 92, 230-239, 2016.
Google Scholar
PIDS App ServiceClick here!