eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Joonho Hyeong
, Jaehwan Lee
10.5143/JESK.2021.40.3.161 Epub 2021 July 02
Abstract
Objective: This study aims at investigating the major design parameter of haptic profile associated with perceived feedback clarity during operation the clicky switches.
Background: A feeling of feedback clarity plays an important role in PUI to improve the user satisfaction and usability. Appropriate level of feedback clarity needs to be revealed when operating a PUI in the context of product use. The feedback clarity is associated with the 'drop force' which is observable in the haptic profile. Also, it is associated with the 'acceleration' resulting from physical interaction between the controller and the body. But detailed physical properties of controller effect on the acceleration and the perceived feedback clarity has not been revealed yet. The haptic profile is useful method to define the design parameters of controller in quantitative manner.
Method: Two design parameters, Drop Size and Drop Rate, both are composing the 'drop force' at the haptic profile are defined. Drop size means that the quantities of a dropped force and the Drop Rate mean that the slope of drop curve. Ten experimental switches having different design parameters are designed and manufactured. A separate experiment, measuring the acceleration and perceived feedback clarity has performed respectively.
Results: A strong correlation (r=0.957) was observed between the Drop Size and the feedback clarity. However, relatively moderate correlation (r=0.673) was observed between the Drop Rate and feedback clarity. It is means that the feedback clarity strongly affected by the Drop Size rather than the Drop Rate. Meanwhile, the correlation between the feedback clarity and the acceleration was almost perfect (r=0.984) which means the increased acceleration directly affecting the feeling of feedback clarity.
Conclusion: This study suggests design strategies of PUI to achieve the preferred feedback clarity level by changing of haptic profile.
Application: The results contribute to the design a PUI having satisfied level of feedback clarity.
Keywords
Haptic profile Drop force Drop size Feedback clarity Acceleration
제품 사용 시 조작에 대한 피드백으로서 시각, 청각 그리고 촉각 등 다양한 감각 채널을 활용할 수 있으나 시스템이 진화함에 따라 자극 전달속도가 빠르고 양방향성을 가진 촉각적 인터페이스에 대한 중요도가 높아지고 있다(Sohn et al., 2005). 촉각적 피드백은 컨트롤러의 사용 과정에서 경험하는 촉각적 자극으로서 사용성을 향상시키는 중요한 역할을 한다(MacLean, 1999; Swindells et al., 2007; Jiao et al., 2006; Rhiu et al., 2011; Jung et al., 2017). 사용자는 시선을 주변 맥락에 집중하면서도 촉각 피드백을 통해 조작 행위를 통제할 수 있어 안전과 직결된 사용 환경에서 촉각 인터페이스는 필수적이다(Choi et al., 2017). 조작이 성공했을 때 피드백으로서 제공되는 촉각적 자극은 사용자에게 조작 성공에 대한 확신과 만족감을 주는데 이러한 촉각적 자극에서 오는 감성을 피드백 명확성(feedback clarity)이라고 한다(Rhiu et al., 2018).
피드백 명확성은 크기를 갖는다는 점에 주목할 필요가 있다. 사용 환경과 상황에 따라 사용자에게 적절한 크기의 피드백 명확성을 제시하는 것은 사용성 향상에 도움이 된다. 예로 Kim and Tan은 촉각적 피드백 강도가 타이핑 능력에 영향을 준다고 보고하였다(Kim and Tan, 2014). 이는 타이핑이라는 사용 상황에 효과적인 촉각적 피드백의 적정 수준이 있음을 보여준다. 한편 컴퓨터 기반 힘 제어기술을 접목하여 하나의 컨트롤러에서 사용모드에 따라 다양한 기능을 수행하는 햅틱 컨트롤 시스템이 등장하고 있다(Jun et al., 2010; Kim et al., 2012; Kim et al., 2019). 예로 BMW는 I-Drive라는 햅틱디바이스를 차량에 적용하여 사용모드에 따라 촉각을 자극하는 물리적 속성을 다양하게 제시함으로써 촉각 만으로 현재의 모드를 파악하고 직관적으로 조작할 수 있게 한다(Ma and Kim, 2004). 이러한 기술적 환경에서는 사용 상황과 모드에 맞는 적절한 피드백 명확성을 제공하여 사용성을 향상시킬 수 있는 것이다. 이를 위해서는 사용자가 지각하는 피드백 명확성과 컨트롤러의 물리적 속성 간의 관계를 파악하는 일이 중요하다.
피드백 명확성을 유발하는 촉각적 자극은 두 가지 유형이 있다. 진동(vibration)을 이용한 자극과 힘(force)을 이용한 자극이 그것이다(Jiang et al., 2005; Song et al., 2012). 첫째, 진동은 수동적으로 피부를 통해 지각되는 자극으로서 피드백 명확성에 관련된 진동의 물리적 속성은 잘 알려져 있다. Hwang은 다양한 주파수와 진폭의 진동자극에 대한 감성 평가를 수행한 결과 진동 가속도의 크기가 지각의 강도에 영향을 준다고 하였다(Hwang and Hwang, 2010). Oh도 차량용 햅틱시트의 진동자극에 대해서 가속도가 클수록 자극 인지율이 높다고 하였다(Oh et al., 2014). 둘째, 힘에 의한 자극은 능동적인 조작 과정에서 피부와 근육을 통해 지각되는 것으로서 버튼, 다이얼 그리고 레버 등 PUI의 조작 시 나타난다. 그러나 피드백 명확성에 영향을 미치는 힘 자극의 물리적 속성에 대한 연구는 부족하다. Watanable은 스위치의 햅틱프로파일 상 특징인 drop force의 크기가 클릭감과 명확성에 영향을 준다고 하였다(Watanable and Kosaka, 1995). 여기서 햅틱프로파일은 힘 자극의 물리적 속성을 정량적으로 정의하기 위한 수단으로서 조작력-조작거리(force-stroke)의 대응 커브로 표현된다(Watanable and Kosaka, 1995; Weir et al., 2004; Jun et al., 2010; Lee et al., 2012). Hyeong은 클리키 스위치 조작의 햅틱프로파일을 분석하여 일시적으로 증가된 가속도가 촉각 수용기를 자극해 피드백 명확성을 느끼게 한다고 하였다(Hyeong et al., 2020). 힘 자극의 경우에도 가속도가 피드백 명확성에 영향을 미친다는 것을 예상할 수 있으나 햅틱프로파일 상 drop force의 세부변수와 물리적 속성인 가속도, 그리고 사용자가 지각한 피드백 명확성과의 관계는 체계적으로 밝혀진 바가 없다.
따라서 본 연구에서는 가속도와 피드백 명확성에 영향을 미치는 햅틱프로파일의 특성을 체계적으로 알아보고자 하였다. 이를 위해 햅틱프로파일 상 drop force를 기반으로 설계변수를 정의하고, 정의된 햅틱프로파일을 구현하는 실험용 스위치들을 제작하였다. 피험자가 자발적으로 스위치를 조작하는 동안 발생하는 물리적 상호작용 요소인 가속도를 측정하고 또한 피험자가 주관적으로 느끼는 피드백 명확성의 크기를 측정 하였다. 이를 통해 햅틱프로파일의 특성과 가속도 그리고 피드백 명확성 간의 상관 관계를 확인하였다.
2.1 Define the design variables using haptic profile
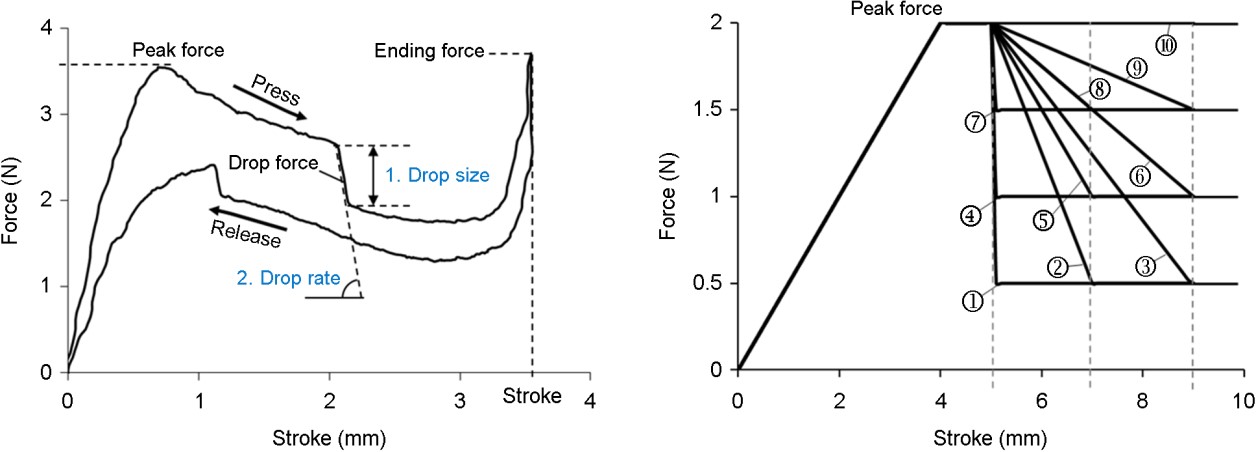
햅틱프로파일의 설계변수 설정에 앞서 버튼의 조작력을 발생시키는 기계적 장치를 살펴보았다. 스위치의 탄성장치는 버튼의 크기나 용도에 따라 버클링 스프링(buckling spring), 고무돔(Lubber dome), 스프링-캠 메커니즘(spring-cam mechanism) 그리고 멤브레인(membrane switch) 등 여러 기술들이 사용되고 있다(Lee et al., 2009; Erdelyi and Talaba, 2010; Lin et al., 2014). 이 때문에 기계적 장치에서 보편적인 설계변수를 정의하기는 어렵다. 대신 어떠한 스위치든 정속 조작에 의한 햅틱프로파일로 반력 특성을 객관화 할 수 있고 이 커브의 형태를 이용하여 물리적인 설계변수를 정의할 수 있다. Watanable은 키보드 스위치에 대한 연구에서 햅틱프로파일 상 특징적인 커브 형태인 최고힘(peak force), 하락힘(drop force) 그리고 종단힘(ending force) 등 주요 물리적 변수를 정의하였다. 실험을 통해 하락힘의 크기에 따라 명확성과 클릭감은 증가한다고 하였다(Watanable and Kosaka, 1995). 본 연구팀도 Figure 1(a)에서 볼 수 있듯이 특정 클릭키 스위치의 햅틱프로파일을 정량적으로 측정함으로써 클릭이 발생할 때 조작력이 급격히 하락하는 순간 가속도와 힘 변화율이 급격히 증가하는 커브 특징을 확인한 바 있다(Hyeong et al., 2020).
본 연구에서는 피드백 명확성을 유발하는 물리적 속성을 알아보기 위해 피드백 명확성과 관련이 있는 햅틱프로파일 상의 하락힘(drop force)의 특성을 두 가지 관점에서 바라보았다. 즉 하락힘이 나타나는 지점에서 힘이 얼마나 많이 하락했는지를 뜻하는 하락폭(drop size; DS)과 얼마나 가파르게 하락했는지를 뜻하는 하락율(drop rate; DR) 두 가지이다(Figure 1(a)). 하락폭 DS와 하락율 DR 개별적으로는 수치가 클수록 피드백 명확성 역시 커질 것으로 예상할 수 있지만 두 변수가 조합된 상황에서 어느 변수의 상관성이 높은지에 대해서는 추가로 연구가 필요하다.
설계변수는 Figure 1(b)와 같이 햅틱프로파일 상 DS와 DR을 단계적으로 변화시키며 10가지로 정의하였다. 먼저 공통적으로 최고힘은 2N으로 설정하였는데 Alexander 등은 조작력 2N의 스위치의 사용빈도가 높다고 하였기 때문이다(Alexander et al., 2014). 최대 조작거리는 10mm로 설정하였다. 이는 일반적으로 선호되는 스위치의 조작거리 5mm (Park and Jung, 2014)보다는 큰 수치이지만 하락힘이 완만히 이루어지는 경우까지 구현하기 위해 조작거리를 10mm까지 늘렸다. Figure 1(b)에서 조작거리 4mm 까지는 조작력이 서서히 증가하여 최고힘에 이르고 5mm까지 최고힘이 유지되도록 설정하였다. 이때부터 하락힘이 나타나는데, DS와 DR을 단계적으로 변화시켜 힘-위치의 좌표 계 내에서 가능한 넓은 범위를 포괄하도록 10가지 사양의 햅틱프로파일을 설정하였다. 설정된 DS 사양은 1.5N, 1N, 0.5N 등 세 단계이고, DR 사양은 하락이 진행되는 조작거리를 기준으로 0mm, 2mm, 4mm 등 세 단계로 설정하였다(Figure 1(b)). 이처럼 DS와 DR의 조합으로 9가지의 햅틱프로파일을 설정하였고 추가로 하락힘이 전혀 발생하지 않는 경우도 포함하여 총 10가지의 설계사양을 실험을 위한 독립변수로 설정하였다.
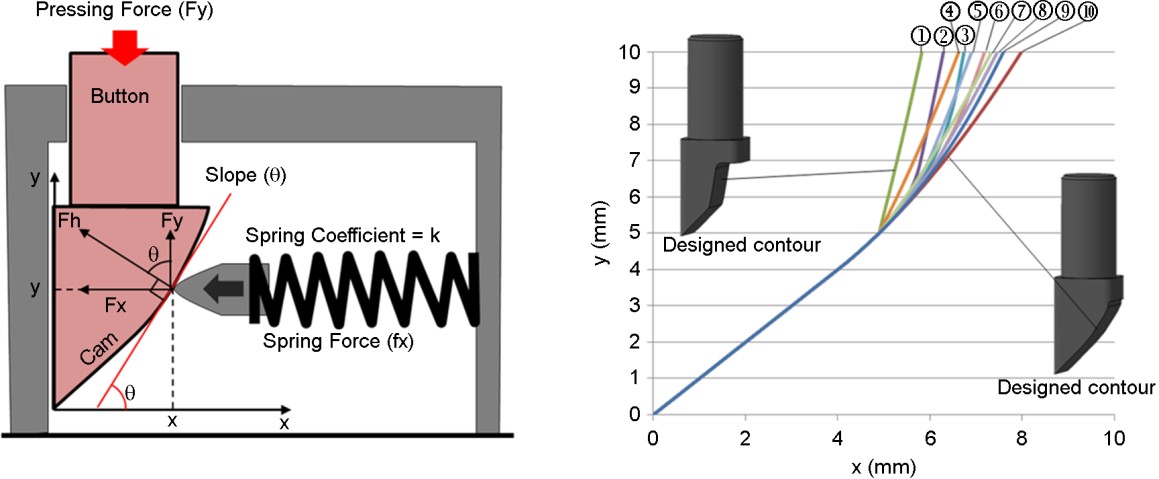
2.2 Design and manufacturing the experimental switches
제시된 10가지 햅틱프로파일을 구현하는 실험용 클리키 스위치를 설계 및 제작하였다. Figure 2(a)는 실험장치 개념도이다. 버튼 하단의 우측면에 경사진 캠을 설계하고 측면에서 스프링을 이용하여 가압하면 스프링 압축력과 캠의 경사면에 의해 버튼이 위로 솟아오르려는 힘이 발생한다(Erdelyi and Talaba, 2010). 이때 스프링 압축력(Fx)과 버튼의 반발력(Fy)은 경사각(θ)에 따라 다음 식 (1)과 같은 관계식을 갖고, 스프링 압축력은 스프링 상수(k)와 압축거리(x)의 관계식 (2)로 표현된다.
(1)
(2)
단, x는 스프링 압축거리, y는 버튼 조작거리, Fx는 스프링 압축력, Fy는 버튼 반력, k는 스프링 상수 그리고 θ는 스프링과 버튼 접촉점의 경사각이다.
위 두 식을 이용하여 압축거리(y)에 따라 사전 정의된 버튼 반력(Fy)를 구현하기 위한 스프링 압축량(x)을 역산으로 도출하였다. 결과적으로 의도했던 햅틱프로파일을 구현하는 캠의 경사면을 Figure 2(b)과 같이 설계하였다.
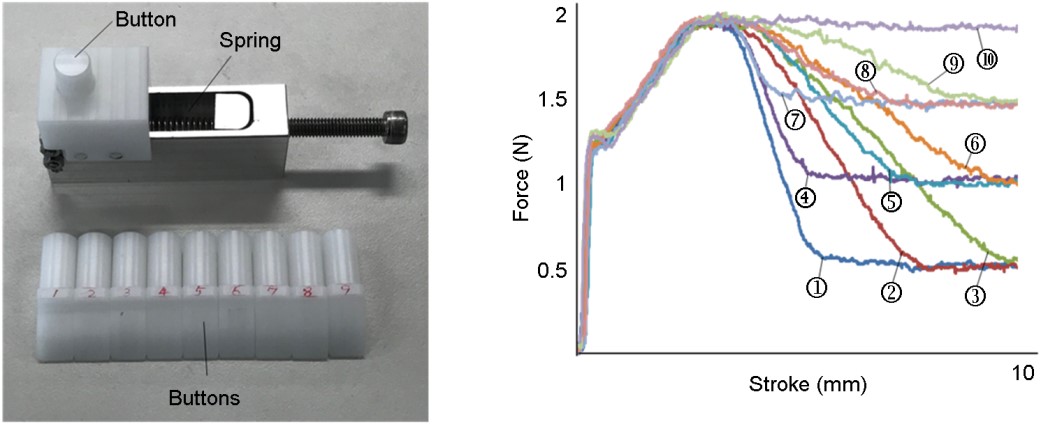
제작된 버튼과 스프링 반력장치는 Figure 3(a)에서 볼 수 있다. 추가로, 제작된 버튼들의 햅틱프로파일을 실측함으로써 정의된 설계사양이 실물에 반영됐는지 확인하였다. Figure 3(b)는 10가지 제작된 버튼에 대해 정속 조작으로 측정된 햅틱프로파일을 보여준다. 설계된 것과 미세하게 다르지만 주요 설계변수인 하략량 DS는 정확히 구현되었다. 다만, 하락율 DR은 설계된 값을 정확하게 구현하지는 못했지만 상대적인 차등은 나타난 것을 확인할 수 있었다. 이 같은 오차는 스프링 가압부가 버튼의 캠에 접촉하는 부위에 마찰력을 줄이기 위해 직경 3mm의 베어링을 장착함에 따라 발생한 현상으로 파악된다. 따라서 변수 DS는 실측된 값을 기준으로 실험을 진행하였다. 최종적인 햅틱프로파일의 설계변수는 Table 1과 같이 정리하였다.
|
Switch number |
No.1 |
No.2 |
No.3 |
No.4 |
No.5 |
No.6 |
No.7 |
No.8 |
No.9 |
No.10 |
|
Drop size (N) |
1.5 |
1.5 |
1.5 |
1 |
1 |
1 |
0.5 |
0.5 |
0.5 |
0 |
|
Drop rate (N/mm) |
0.86 |
0.43 |
0.28 |
0.67 |
0.32 |
2.0 |
0.54 |
0.17 |
0.12 |
0 |
2.3 Experiment
피험자의 스위치 조작에 대해 정량적 측정과 주관적 설문 두 가지 실험을 수행하였다. 먼저 정량적 측정에서는 피험자가 스위치를 자발적으로 누르는 동안 햅틱프로파일을 측정하고 촉각적 자극과 관련이 깊은 가속도를 추출하였다. 주관적 설문은 각각의 스위치 조작 시 느껴지는 촉각적 자극의 크기를 평가하도록 하였다. 이처럼 10개의 실험용 스위치에 대해 물리적 상호작용 요소인 가속도와 지각된 촉각적 자극의 크기를 측정함으로써 설계변수인 DS 그리고 DR이 피드백 명확성에 미치는 영향을 파악하고자 하였다.

2.3.1 Measurement of acceleration during pressing the switches
정량적 실험은 성인 남녀 8명을 대상으로 수행하였다. 피험자의 평균연령은 32.5 [±7.8]세, 평균신장은 168.6 [±6.8]cm, 평균체중은 67 [±15.4]kg이다. 피험자는 주사용손(main hand)의 검지를 이용하여 10개의 실험 버튼을 각각 20회씩 조작하였다. 조작속도는 0.5Hz의 왕복주기로 수행하였는데 이는 2초 동안 누름과 복귀를 완료하는 정도의 속도이다. 조작속도의 일관성을 위해 메트로놈을 이용한 오디오 가이드를 제시하고 박자에 맞추어 일정한 속도로 조작하도록 하였다. 조작 시 발생하는 물리적 상호작용인 조작력과 조작거리를 측정하고 측정된 조작거리의 이차 미분으로 얻어지는 가속도를 확인하였다. 측정장치는 본 연구팀의 이전 연구에서 사용했던 방법을 이용하였다(Hyeong et al., 2020). 힘센서(load cell) 위에 실험용으로 제작된 스위치를 장착하고 버튼 상단에 위치센서(potentiometer)를 접촉시켜 버튼을 누르는 동안 조작력과 조작거리를 측정할 수 있도록 하였다. 위치센서의 탐침 시 탐침기(probe)와 손가락의 간섭을 피하기 위해 버튼 위에 링(ring)을 부착하였다. 링 상단에 탐침기가 접촉되도록 하였고 링 안쪽에 손가락을 넣어 버튼을 누를 수 있도록 하였다(Figure 4(a)). 사용된 힘센서는 CB1-1kgf(다셀, 대한민국)이고 위치센서는 PY2-50 mm(다셀, 대한민국)이다. 힘센서의 신호는 증폭기와 오실로스코프를 거쳐, 동시에 위치센서의 신호는 지시계(indicator)와 오실로스코프를 거쳐 PC에 저장되었다. PC에서 동시에 수신된 두 가지 신호는 영점조정(calibration)을 거쳐 저장되었다. 모든 데이터는 500Hz의 샘플링 주파수로 수집하였다.
2.3.2 Subjective evaluation of perceived clarity
주관적 평가 실험은 성인남녀 16명을 대상으로 수행하였다. 피험자의 평균연령은 34.1 [±6.1]세, 평균신장은 169 [±6.2]cm, 평균체중은 68 [±15.6]kg이다. 피험자는 임의의 순서로 제시된 스위치를 여러 번 누른 후 조작 성공에 대한 피드백 명확성 강도를 10점 척도로(강도가 매우 클 경우 10점) 답변하도록 하였다. 스위치를 누르는 횟수는 제한하지 않고 피험자가 원하는 만큼 충분히 눌러볼 수 있도록 하였다(Figure 4(b)). 주관적 평가의 모호함을 줄이기 위해 사전에 모든 스위치를 눌러볼 수 있게 하여 촉각적 자극의 크기에 대한 기준과 범위를 스스로 인식할 수 있도록 하였다. 10개의 버튼에 대해 모두 평가하면 1세트가 종료되며 피험자 마다 총 3세트의 실험을 수행하였다.
2.4 Data analysis
스위치의 설계변수인 DS와 DR은 연속형 자료이기 때문에 가속도 및 피드백 명확성과의 관계를 확인하기 위해 상관성 분석을 수행하였다. SPSS(12)를 이용하여 DS, DR, 가속도 그리고 피드백 명확성 등 4가지 요인에 대해 상관성 분석을 수행하였다. 그리고 상관성이 확인된 변수 간에는 회귀분석을 수행하고 결정계수(r2)를 확인하였다.
3.1 The Acceleration and Feedback Clarity depending on DS and DR
DS와 DR의 변화에 따른 10개의 스위치에 대해 정량적 측정치인 가속도와 주관적 평가인 피드백 명확성의 측정결과를 Table 2에 정리하였다. 스위치 번호 1번에서 가속도와 명확성 모두 가장 컸고 스위치 10번에서 가장 작았다. 스위치 번호가 증가함에 따라 가속도와 피드백 명확성은 작아지는 경향을 보여 전반적으로 DS와 DR이 감소하면 가속도와 피드백 명확성도 감소하는 경향을 보였다.
|
Switch number |
DS (N) |
DR (N/mm) |
Acceleration (m/s2) / n=8 |
Feedback clarity (10 scale) / n=16 |
|
No.1 |
1.5 |
0.86 |
64.2 [9.6] |
9.19 [1.0] |
|
No.2 |
1.5 |
0.43 |
61.7 [10.2] |
8.88 [0.98] |
|
No.3 |
1.5 |
0.28 |
51.0 [10.1] |
7.68 [1.15] |
|
No.4 |
1 |
0.67 |
42.1 [3.9] |
5.94 [1.36] |
|
No.5 |
1 |
0.32 |
38.6 [3.9] |
5.44 [1.40] |
|
No.6 |
1 |
0.2 |
35.5 [4.3] |
4.65 [1.44] |
|
No.7 |
0.5 |
0.54 |
28.8 [4.3] |
2.98 [1.18] |
|
No.8 |
0.5 |
0.17 |
28.2 [6.2] |
2.1 [0.88] |
|
No.9 |
0.5 |
0.12 |
24.8 [4.7] |
1.71 [0.97] |
|
No.10 |
0 |
0 |
23.7 [5.4] |
1.52 [1.62] |
3.2 The correlation analysis between feedback clarity and design variables
피드백 명확성과 설계변수 간의 관련성을 세부적으로 확인하기 위해 상관성 분석을 수행하고 피어슨 상관계수를 확인하였다(Table 3). 햅틱프로파일의 설계변수인 DS와 DR은 모두 피드백 명확성(Feedback clarity)과 연관성을 보였는데, DS는 매우 강한 관계(r=0957, p<.01)를 DR은 상대적으로 약한 관계(r=0.673, p<.05)를 보였다. DS와 DR은 가속도와도 연관성을 보였는데, DS는 매우 강한 관계(r=0927, p<.01)를 DR은 상대적으로 약한 관계(r=0.673, p<.05)를 보였다. 이 같은 결과는 본 햅틱프로파일의 설계변수 중 DR보다는 DS가 피드백 명확성에 더 큰 영향을 미친다는 점을 보여준다. 또한 스위치 조작 시 물리적으로 측정되는 가속도와 피드백 명확성 사이에도 강한 상관 관계를 보여(r=0.984, p<.01) 촉각을 자극하는 가속도는 피드백 명확성의 지각에 매우 큰 영향을 미친다는 것을 확인할 수 있었다. 한편 DS와 DR는 설계변수이기 때문에 상호 관계를 파악하는 것은 의미 없고 실제 신뢰도도 낮게 나타났다(p>0.5).
|
DS |
DR |
Acceleration |
Feedback Clarity |
||
|
DS |
Pearson's r |
1 |
|
|
|
|
p |
0 |
|
|
|
|
|
DR |
Pearson's r |
0.588 |
1 |
|
|
|
p |
0.074 |
0 |
|
|
|
|
Acceleration |
Pearson's r |
.927** |
.673* |
1 |
|
|
p |
0.000 |
0.037 |
0 |
|
|
|
Feedback clarity |
Pearson's r |
.957** |
.673* |
.984** |
1 |
|
p |
0.000 |
0.022 |
0.000 |
0 |
|
|
*means moderate correlation
and **means strong correlation |
|||||
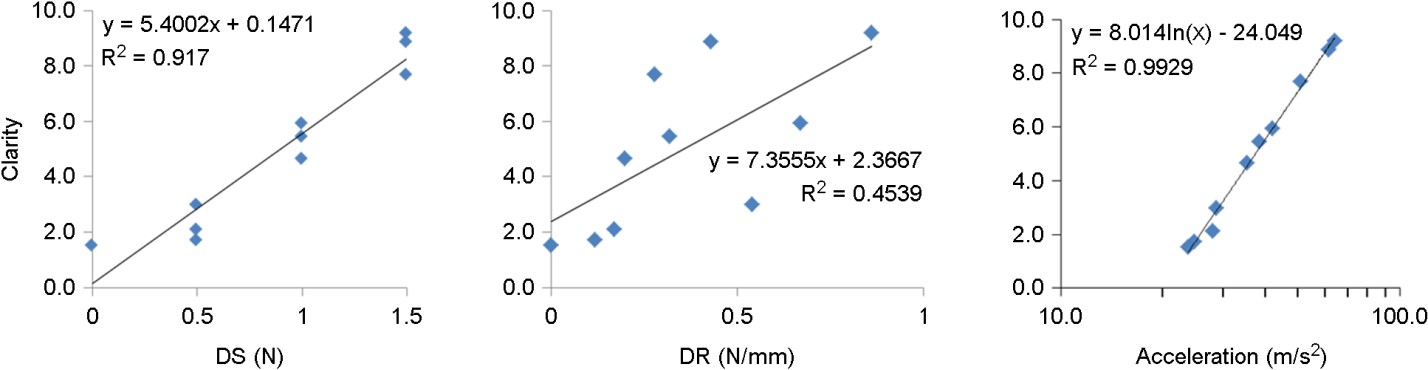
이 같은 상관성은 산점도(Scatter plot)와 회귀분석을 통해 확인할 수 있었다(Figure 5). DS와 피드백 명확성은 높은 결정계수(r2= 0.917)의 선형회귀식이 도출되었고, DR과 피드백 명확성은 낮은 결정계수(r2=0.454)의 선형회귀식이 도출되었다. 마지막으로 가속도와 피드백 명확성은 매우 높은 결정계수(r2=0.9929)의 로그형 회귀식이 표현되었다. 여기서 로그 스케일로 분석한 이유는 심리적 강도는 자극 강도의 로그값에 비례한다는 Fechner의 법칙을 따른 것이다.
4.1 The mechanism of experiencing clarity
Watanable은 햅틱프로파일의 최고힘(peak force)과 하락힘(drop force)이 클수록 피드백 명확성이 크게 느껴진다고 보고한 바 있다(Watanable and Kosaka, 1995). 컨트롤러 조작 중 반력이 급감하면 사용자는 갑자기 사라진 힘에 미처 적응하지 못하고 조작속도 증가와 그에 따른 강한 후반동 그리고 높은 가속도를 겪게 된다. 이는 조작 성공에 대한 명확한 피드백을 유발하는 촉각적 자극으로 작용하게 된다(Hyeong et al., 2020). 본 연구에서도 DS의 크기가 피드백 명확성을 유발하는 중요한 요인이라는 것을 다시 한번 확인할 수 있었다. 하지만 본 연구에서 발견한 더욱 중요한 점은 반력이 하락하는 급격함을 의미하는 DR의 피드백 명확성에 미치는 영향은 상대적으로 작았다는 사실이다. 그렇다면 그 이유는 무엇일 까? 힘 하락의 급격함 정도에 관계없이 사람은 그 변화에 빠르게 대응하지 못한다는 것을 의미한다. 연구에 따르면 감각자극에 대한 운동반응 시간은 최소 0.2 sec 이상 걸린다고 한다(Kim and Lee, 1999). 즉, 힘이 하락했음을 인지하고 동작 안정화를 위한 운동제어로 이어지기까지 시간지연이 발생한다. 이 때문에 조작 동작 중에 힘이 하락하기 시작하면 그 하락률이 매우 가파르지 않더라도 조작속도 증가와 후반동을 느끼기에 충분한 것으로 해석된다. 그 모든 일이 0.2 sec 안에 이루어지기 때문이다. 결과적으로 DR의 크기는 DS보다 상대적으로 피드백 명확성에 큰 영향을 주지 못한 것이다. 이 같은 결과는 선형적 조작인 스위치뿐만 아니라 회전 조작인 다이얼과 레버 등 다양한 동작에서도 나타날 가능성이 있다. 조작에 관여하는 신체부위에 따라 정도의 차이는 있겠지만 감각자극에 대한 반응지연이 나타나기 때문에 힘이 하락하는 기울기인 DR보다는 하락하는 양인 DS가 피드백 명확성에 주도적인 기여를 할 것으로 예상된다.
한편 스위치 조작 시 발생하는 물리적 속성인 가속도와 심리적 속성인 피드백 명확성 사이에도 매우 강한 상관 관계를 보였다는 점은 선행연구에 부합하였다. Hyeong은 클리키 스위치 조작 시 일시적으로 발생하는 높은 가속도가 파치니언소체(Pacinian corpusles) 같은 진동 가속도에 반응하는 감각 수용기를 자극한다고 하였으며(Hyeong et al., 2020) Hwang도 진동자극에서 발생하는 높은 가속도는 지각의 강도와 관련된 감성어휘에 영향을 준다고 하였다(Hwang et al., 2010).
4.2 Limitation of the study
본 연구에서는 피드백 명확성의 강도가 각기 다른 실험용 스위치들에 대해 만족감 조사는 하지 않았다. 그 이유는 제품분야와 사용 맥락에 따라 선호되는 수준이 다를 수 있기 때문이다. 본 실험은 스위치가 장착된 제품의 사용 환경을 설정하지 않았기 때문에 주관적 만족도를 측정하기에는 무리가 있다고 보았다. 향후 제품 사용 환경을 구성할 경우 피드백 명확성의 수준에 따른 만족도 연구도 가능할 것으로 보인다.
본 연구에서는 조작에 대한 촉각적 반응인 피드백 명확성에 영향을 주는 햅틱프로파일의 설계변수를 파악하였다. 설계변수는 스위치 메커니즘에 관계없이 보편적으로 표현할 수 있는 햅틱프로파일을 이용하여 정의하였다. 햅틱프로파일 상 힘 하락량(DS)과 하락율(DR) 두 가지 설계변수가 물리적 측정값인 가속도와 주관적인 피드백 명확성에 미치는 영향을 분석하여 힘 하락량이 하락률보다 피드백 명확성에 더 큰 영향을 미친다는 것을 확인하였다. 이 같은 결과는 컨트롤러에서 피드백 명확성의 강도를 변화시키고자 할 때 햅틱프로파일 커브의 설계 방향에 대한 근거를 제시한다고 할 수 있다.
다양한 제품의 사용 맥락에 맞게 컨트롤러의 피드백 명확성은 다르게 설계될 필요가 있다. 제품유형과 사용 상황 그리고 조절 동작과 장치의 크기에 따라 효율적이고 만족스러운 피드백 명확성의 수준은 다를 것이다. 이 같은 다양한 사용 상황에 맞는 적절한 크기의 피드백 명확성을 설계할 때 본 연구의 결과는 유용하게 활용될 수 있을 것이다. 피드백 명확성을 설계한다는 것은 단지, 컨트롤러 부품 수준의 개발 과정에서뿐만 아니라 제품 또는 시스템에 적용할 컨트롤러를 선정하는 과정도 포함된다. 더욱 중요하게는 향후 증가하게 될 컴퓨터로 제어되는 햅틱 컨트롤 시스템 분야에서 다양한 사용모드에 따라 사용자에게 전달 될 피드백 명확성을 다채롭게 구현하는데 본 연구가 활용될 수 있을 것이다. 마지막으로 PUI의 물리적 속성과 사용자의 감성을 대응시키기 위한 수단으로서 햅틱프로파일이 유용하게 활용될 수 있음을 보였다는 데에 본 연구의 또 다른 의의가 있다.
References
1. Alexander, J., Hardy, J. and Wattam, S., Characterizing the Physicality of Everyday Buttons, ITS '14 Proceedings of the Ninth ACM International Conference on Interactive Tabletops and Surfaces, 205-208, 2014.
Google Scholar
2. Choi, D., Ban, K., Choe, J. and Jung, E., An Ergonomic Shape Design for Automotive Push-Return Switches, Journal of the Ergonomics Society of Korea, 36(1), 9-21, 2017.
Google Scholar
3. Erdelyi, H. and Talaba, D., Virtual prototyping of a car turn-signal switch using haptic feedback, Engineering with Computers, 26, 99-110, 2010.
Google Scholar
4. Hwang, J.H. and Hwang, W.I., Perception and Emotion for Fingertip Vibrations, Archives of Design Research, 23(5), 127-137, 2010.
5. Hyeong, J., Kim, S., Roh, J. and Lee, J., Study on Quantitative Indicators associated with the Feedback Clarity during Operation of a Clicky Switch, Journal of the Ergonomics Society of Korea, 39(1), 19-29, 2020.
Google Scholar
6. Jiang, L., Girotra, R., Cutkosky, M.R. and Ullrich, C., Reducing error rates with low-cost haptic feedback in virtual reality-based training applications, Proceedings of World Haptics Conference. IEEE Computer Society, Los Alamitos, 420-425, 2005.
Google Scholar
7. Jiao, J., Zhang, Y. and Helander, M., A Kansei mining system for affective design, Expert Systems with Applications, 30, 658-673, 2006.
Google Scholar
8. Jun, C., Choo, H., Park, S., Kim, L. and Shin, S., Torque Profile Measuring and Sensibility Evaluation of a Haptic Device, Society of CAD/CAM Engineers, 15(3), 222-233, 2010.
Google Scholar
9. Jung, K., Yun, H. and Cho, B., Turning Effect Design for the Operating Feel of Jog Dial, Journal of the Ergonomics Society of Korea, 36(6), 785-793, 2017.
Google Scholar
10. Kim, H.S., Lee, S.J. and Kim, B.W., A Study on the Multi-sensory Usability Evaluation of Haptic Device in Vehicle, Journal of the Korea Academia-Industrial Cooperation Society, 13(11), 4968-4974, 2012.
Google Scholar
11. Kim, J. and Tan, H., Haptic feedback intensity affects touch typing performance on a flat keyboard, EuroHaptics 2014, Part I, LNCS 8618, 369-375, 2014.
Google Scholar
12. Kim, K. and Lee, H., Effects of temporal and spatial uncertainty of stimulus on the information processing time, The Korean Journal of Physical Education, 38(4), 187-194, 1999.
13. Kim, T., Yun, I., Lee, H. and Kim, S., Development of a haptic button based on smart material, Journal of Digital Contents Society, 20(8), 1671-1677, 2019.
Google Scholar
14. Lee, D.L., Kuo, P.L., Jindrich, D.L. and Dennerlein, J.T., Computer keyswitch force-displacement characteristics affect muscle activity patterns during index finger tapping, Journal of Electromyography and Kinesiology, 19(5), 810-820, 2009.
Google Scholar
15. Lee, J., Byun, J., Jeong, J. and Lim, C., Sliding Factor Development on Mechanical Emotion in Mobile Phone of Slide Type, Journal of the Ergonomics Society of Korea, 31(6), 757-764, 2012.
Google Scholar
16. Lin K.C, Wu C.F., Hsu H.L., Tu Y.H. and Wu C.C., A Study on the Effect of Design Factors of Slim Keyboard's Tactile Feedback, International Scholarly and Scientific Research & Innovation, 8(8), 2812-2818, 2014.
Google Scholar
17. MacLean, K.E., Application-Centered Haptic Interface Design, Chapter in Human and Machine Haptics, Srinivasan, M., Cutkosky, M., Eds., MIT press, 1999.
Google Scholar
18. Ma, J.S. and Kim, H.N., A recent development of haptic devices for temematics control units, Proceedings of the KIEE Conference, 406-409, 2004.
Google Scholar
19. Oh, S.Y., Kim, K.T., Yu, C.H., Han, K.S. and Kwon, T.K., Study on Vehicle Haptic-Seat for the Information Transfer to Driver, Journal of Rehabilitation Welfare Engineering & Assistive Technology, 8(1), 1-7, 2014.
Google Scholar
20. Park, S.B. and Jung, K.H., Evaluation of Various Button Angles and Operation Displacements for Ergonomic Button Design of an Automobile, Proceedings on Korean Institute of Industrial Engineers 2014, 490-496, 2014.
21. Rhiu, I., Jin, B., Lee, J. Park, N., Gohng, J. and Yun, M., Effect of Haptic Feedback Type on Control Feel of a Thumbwheel Device, Proceedings on HCI 2011, 809-812, 2011.
22. Rhiu, I., Bahn, S., Nam, C. and Yun, M., Affective experience of physical user interfaces: Similarities and differences among control types, Human Factors and Ergonomics in Manufacturing & Service Industries, 28(2), 56-68, 2018.
Google Scholar
23. Sohn, M.S., Shin, H.S., Park, J.S. and Han, D.W., Trends of haptic interface for wearable computers, Electronics and Telecommunications Trends, 20(5), 149-155, 2005.
Google Scholar
24. Song, J., Lim, J. and Yun, M., A review of haptic perception: Focused on sensation and application, Journal of the Ergonomics Society of Korea, 31(6), 715-723, 2012.
Google Scholar
25. Swindells, C., MacLean, K.E., Booth, K.S. and Meitner, M.J., Exploring Affective Design for Physical Controls, SIGCHI Conference on Human Factors in Computing Systems, 933-942, 2007.
Google Scholar
26. Watanable, K. and Kosaka, H., Evaluation of Keyboard switches based on Kansei (Human Sensitivity) Information, IEEE International Workshop on Robot and Human Communication, 69-74, 1995.
Google Scholar
27. Weir, D., Peshkin, M., Colgate, J.E., Buttolo, P., Rankin, J. and Johnston, M., Switch Characterization and the Haptic Profile, 12th Haptic Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, 27-28, 2004.
Google Scholar
PIDS App ServiceClick here!