eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Hye Seong Oh
, Guang Jun Piao
, Eui Seung Jung
10.5143/JESK.2022.41.3.265 Epub 2022 July 01
Abstract
Objective: The purpose of this study is to find out how the angle of seat backrest and the number of hands in use affect the takeover reaction time, driving readiness, and driving situation awareness when performing NDRT (Non-Driving Related Task) in a conditional autonomous vehicle.
Background: Driver of an autonomous vehicle of level 3 or higher is freed from the duty of controlling and monitoring the vehicle. As a result, the driver can perform various NDRTs. When performing NDRT, the angle of the seat back that the driver wants to pose may be different. In a previous study, it was mentioned that, when the angle of seat backrest is reclined to the maximum, the takeover is affected. However, it is not known with certainty what effect the change of the seat back angle has on the takeover. A previous study found that some type of NDRTs, which restricted the driver's hand during activity, influenced the takeover reaction time. However, it is not known with certainty what effect the number of hands in use has within the same NDRT. The study aims to know how the angle of the seat backrest and the number of hands in use for performing NDRT in a level 3 autonomous vehicle affect takeover time, driving readiness, driving situation awareness.
Method: To investigate the effect of the number of hands in use for performing NDRT and the angle of the seat backrest on the takeover, the experiment was performed using a driving simulator. The type of NDRT is classified into 4 levels, and the angle of the seat backrest is classified into 3 levels. Participants performed 12 trials randomly. In the experiment, preference for seat back angle performing NDRT was investigated, and takeover time was measured after takeover occurred. After the experiment was over, the participant responded to driving readiness, driving situation awareness, and the preference for the angle of seat backrest again.
Results: The number of hands used during NDRT and the angle of the seat back affect the driver's takeover reaction time, driving readiness, and driving situation awareness. The higher the number of hands in use and the higher the seat back angle, the more negative the driver is.
Conclusion: When designing the driver monitoring system, it is necessary to check the physical situation of drivers performing the NDRT.
Application: The results of this study can be used to make guidelines for the angle of the seat backrest and hand use behavior to maintain driver's proper driving readiness when performing NDRT in level 3 autonomous driving. The results of this study will help to design a driver-centered autonomous vehicle cockpit based on the driver's preference for the angle of the seat backrest.
Keywords
Autonomous driving Non-Driving related task Reaction time Driver readiness
자율주행 차량은 첨단 운전자 보조 시스템(ADAS)과 관련된 기술의 향상으로 인해, 최근 몇 년 동안 널리 논의되고 있다. 자율주행 차량은 다양한 센서(라이다, 카메라, 레이더 등)를 통해 차선, 보행자, 장애물을 인식하고, 차선을 따라 주행하여 스스로 제어하는 방법을 학습한다(Seif and Hu, 2016).
이러한 자율주행 차량은 자율주행 시스템의 요구 사항이 충족되는 한 스스로 차량의 주행이 가능하다. 그러나 시스템이 한계에 도달한 경우, 운전자의 안전을 위하여 시스템은 비상 제동을 실시하거나 차량 탑승자에게 제어권을 넘기게 된다(Walch et al., 2015).
SAE J3016에 따르면, 운전자의 안전과 편리함을 증진시키기 위하여 발전된 자율주행 차량은 자율주행 정도와 주행 주체에 따라 레벨 0부터 레벨 5까지 총 6단계로 구분되어 있다. 레벨 0은 운전자가 완전히 수동으로 주행하는 비 자율주행을 의미하며, 레벨 5는 어느 상황에서도 운전자의 개입 없이, 차량만으로 주행이 가능한 단계를 의미한다. 자율주행 레벨이 5에 가까워질수록 자율주행 차량은 운전자의 개입이 최소화된 무인 자율주행에 가까운 상태를 의미한다. 이 중에서 레벨 3에 해당하는 단계는 조건부 자율주행이라고 부르며, 차량 내에서 주행 제어와 주행 중 변수 감지를 자율주행 시스템이 담당한다. 레벨 3 자율주행 차량에서는 자율주행 시스템이 주행을 담당하기 때문에 운전자의 상시 모니터링이 요구되지 않는다(Naujoks et al., 2018).
레벨 3 이상의 차량부터는 차량을 제어하고 모니터링 하는 의무에서 벗어나기 때문에, 주행 시 운전자는 NDRT (Non-Driving Related Task)를 주로 수행한다. 운전자가 NDRT를 수행하는 중, 자율주행 시스템이 변수를 감지하거나 한계에 도달한 경우에는 즉시 운전자에게 운전에 대한 개입을 요청하게 된다. 운전자가 자율주행 시스템의 TOR (Takeover Request)에 대응하고 안전하게 차량 제어를 인수하기 위해서, 운전자는 자율주행 중에 적절한 수준의 준비 태세를 유지해야 한다. 수동 운전으로 전환하기 직전의 운전자의 준비 상태는 제어권 전환 인수 성능에 영향을 줄 수 있으며, 운전자의 수동주행을 하기 위한 준비 정도는 NDRT의 유형에 따라 영향을 받는다. 이전의 연구 결과는 NDRT 유형 중 문자 메세지를 이용하는 것은 음주를 하는 것보다 운전자의 준비를 더욱 저하시키며 운전자의 주의 산만을 일으킬 수 있다고 언급하였다(Kim et al., 2020).
따라서 자율주행 중 발생하는 비상 상황을 안전하게 대처하기 위해, 운전자의 NDRT에 따른 제어권 전환 능력에 대한 이해가 충분히 필요하다. 기존 연구들은 운전자가 NDRT를 수행하기 위하여 물건을 손에 쥐어야 하는 경우, 제어권 전환 시간이 늘어났다고 언급하였다. 그리고 NDRT의 유형에 따른 제어권 전환 능력을 비교한 경우 텍스트 읽기와 게임 사이에 유의한 차이는 없으며, 비디오 시청과 텍스트 읽기 사이에서도 유의한 차이는 없었다. 하지만, 비디오 시청을 하는 경우 라디오 청취를 하는 경우보다 제어권 전환 시간이 증가하였다(Naujoks et al., 2019).
하지만 NDRT 유형 내에서 운전자는 다양한 상황에 놓일 수 있다. 운전자는 NDRT를 수행하기 위해 자신이 선호하는 좌석 등받이 각도를 조절할 수 있으며, 운전자가 깁스와 같이 손을 자유롭게 사용하기 힘든 상태이거나 특정 NDRT를 수행하는 상황에서 손의 사용에 제약이 발생할 수 있다. 그리고 이러한 손의 사용에 대한 제약은 운전자의 제어권 전환 퍼포먼스에 영향을 주며, 운전석의 좌석 등받이 각도를 최대로 젖히게 된 경우 역시도 제어권 전환 퍼포먼스에 영향을 준다(Han et al., 2019). 하지만 이러한 좌석 등받이의 각도와 NDRT 수행 시 사용 중인 손의 개수와 같은 운전자의 물리적인 상태의 수준에 따라 제어권 전환에 미치는 영향에 대한 연구는 현재 부족한 상황이다.
본 연구에서는 레벨 3 자율주행 내에서 운전자의 NDRT 수행 시 사용 중인 손의 개수와 좌석 등받이 각도에 따라 실험을 진행하고자 하며, 운전석의 각도와 NDRT 수행 시 사용 중인 손의 개수와 같은 물리적인 상태가 제어권 전환에 어떠한 영향을 미치는지 연구하고자 한다. 이와 함께, 운전자의 운전준비도와 주행상황인지에 미치는 영향을 파악하고자 한다. 그리고 해당 실험 내에서 제어권 전환 경험으로 인한, NDRT 수행 시의 좌석 등받이 각도에 대한 선호도 변화를 파악하고자 한다.
2.1 Participants
본 연구의 실험에 참여하는 피실험자는 운전 경험이 있는 총 24명(남: 12, 여: 12)을 대상으로 구성하였다. 피실험자 집단의 평균 연령은 남자 28.58세, 여자 27.08세이다. 모든 실험자들은 운전 면허 자격증을 취득하였으며, 평균 운전 경력은 2.58년(표준편차=1.93)이다. 또한, 모든 피실험자들은 정상 범위의 시력을 지녔으며, 연구 참여에 대한 동의를 얻은 후 진행하였다.
2.2 Apparatus
본 실험은 과업 수행을 위하여 27인치 삼성 LCD flat panel screen을 사용하였다. 자율주행 과업 수행을 위하여 software는 'Euro Truck Simulator2' 프로그램을 사용하였다. 그리고 수동주행 시 운전 과업을 수행하기 위하여 Logitech G27 racing wheel, brake 및 clutch pedal을 사용하였다. 그리고 NDRT 중 하나인 비디오 시청을 수행하기 위하여 Samsung notebook9 pen(세로: 206.6mm, 가로: 310.5mm)을 사용하였다(Figure 1).

2.3 Experimental design
NDRT 수행 중 사용 중인 손에 따른 제한과 좌석 등받이 각도가 제어권 전환에 미치는 영향을 확인하기 위한 실험을 설계하였다. 독립 변수 중 하나인 NDRT의 유형에 대한 대부분의 연구는 모달리티와 관련된 연구이다. NDRT의 모달리티는 세 가지의 타입으로 구성된다. 이는 시각(Visual), 청각(Auditory), 운동근육(Motoric)이다(Kwon and Jung, 2019). 이번 실험은 청각과 시각의 듀얼 모달리티 타입으로 구성된 비디오 시청 NDRT를 활용하여, NDRT 수행 시 사용 중인 손의 개수에 따른 제어권 전환에 대한 영향을 분석하고자 하였다. NDRT는 4가지로 구분하여 실험하였다. 해당 NDRT 유형은 아무것도 하지 않고 전방을 주시하는 행위, 두 손이 자유로운 상태에서 센터페시아 디스플레이로 비디오 시청하기, 한 손에 물 컵(180ml)을 쥔 상태에서 비디오 시청하기, 두 손에 물 컵을 쥔 상태에서 비디오 시청하기로 구성되었다.
좌석 등받이 각도는 Parida et al. (2019)를 바탕으로 좌석 시트를 기준으로 하여 3가지 수준인 90도, 120도, 150도로 설정하였다. 90도는 일반적인 운전자들이 업무를 하거나 음식을 섭취하는 경우 선호하는 자세이며, 125도는 글을 읽거나 대화를 하는 경우 운전자들이 선호하는 자세이다. 마지막으로 150도는 운전자들이 쉬거나 음악을 청취하는 경우 운전자들이 선호하는 자세이다.
본 실험은 4×3 개체 내 설계로 구성되었으며(Table 1), 각 독립 변수는 counterbalancing을 통해 실험 시 랜덤으로 진행되었다. 제어권 전환 요청은 선행 연구(Han et al., 2019)를 참고하여, Samsung notebook9 pen 화면 내에 아이콘 및 문자(시각정보)가 표기되었고 동시에 "수동 운전으로 전환해주세요."라는 음성 안내(청각정보)가 제공되었다. 운전자는 자율주행 중 NDRT를 수행하다가 제어권 전환 요청이 발생할 경우, 핸들 혹은 페달을 이용하여 수동주행으로 전환하고 실험을 마치게 된다.
|
Independent variables |
Level of the variables |
|
NDRT type |
1: Nothing |
|
2: Watching video |
|
|
3: Watching video holding
a cup of water in one hand |
|
|
4: Watching video holding
a cup of water in both hands |
|
|
Angle of seat backrest |
90°, 120°, 150° |
2.4 Dependent variables
종속 변수는 총 네 가지로 첫 번째는 제어권 전환 시 걸리는 시간을 평가함으로써 NDRT 중 손의 사용 유무와 좌석 등받이 각도에 따른 제어권 전환 퍼포먼스를 분석하였다. 이를 위하여, 제어권 전환 요청이 발생한 시점부터 운전자가 스티어링 휠 또는 클러치 페달을 조작하여 반응하기까지의 시간을 초 단위로 측정하였다. 두 번째와 세 번째는 제어권 전환 수행 이후 운전자의 운전준비도와 주행상황인식이 NDRT 중 손의 사용 유무와 좌석 등받이 각도에 따라 차이가 있는지 살펴보고자 한다.
운전준비도(Driver Readiness)는 자율주행 상태에서 수동주행 상태로 제어권 전환 시, 운전자가 차량의 수동주행을 얼마나 잘 수행할 수 있는지에 대한 여부를 나타내는 운전자의 상태를 의미한다. 기존 연구에서는 운전자가 NDRT에 몰입한 상태가 되면, 운전준비도는 낮아지게 되며 해당 상태에서 수동주행을 할 경우 위험성이 존재하기 때문에 이러한 운전준비도를 측정하는 연구가 필요하다고 언급하였다(Kim et al., 2018). 운전준비도는 Kim et al. (2020)의 연구를 참고하여 10점 리커트 척도를 사용하였으며, 0점은 준비가 안됨을 의미하며 10점은 충분히 준비가 됨을 의미한다.
Kim et al. (2019)에 따르면 자율주행 시스템이 운전하는 중에 운전자는 모니터링에 대한 의무가 없어지기 때문에 상황 인식 레벨이 감소한다고 언급하였다. 따라서 주행상황인식과 관련된 운전자의 주관적인 상태에 대한 연구가 필요하다. 따라서 Kim et al. (2020)의 연구를 바탕으로 운전 중 도로의 신호 상태, 주행 방향, 가속 여부를 얼마나 잘 인식하였는지 나타내는 지표인 주행상황인식에 대하여 설문하였다. 주행상황인식은 Kim et al. (2020)의 연구를 참고하여 10점 리커트 척도를 사용하였으며, 0점은 상황을 인식하는 것이 매우 알기 어려움을 의마하며 10점은 상황을 인식하는 것이 매우 알기 쉬움을 의미한다.
그리고 마지막으로 네 번째는 NDRT 수행 시 사용 중인 손의 개수와 좌석 등받이 각도에 따른 선호도를 제어권 전환 수행 전과 후에 각각 측정함으로써, 제어권 전환이 운전자의 영`상을 시청하는 NDRT에 대한 선호도에 어떠한 영향을 끼치는지 살펴보고자 한다. 좌석 등받이 각도에 따른 선호도는 10점 리커트 척도를 사용하였으며, 0점은 매우 선호하지 않음을 의미하며 10점은 매우 선호함을 의미한다.
2.5 Procedure
모든 피실험자는 실험실에 도착 후, 실험 배경 및 목적과 주의 사항에 대한 설명을 통해 실험을 충분히 이해하는 과정을 거쳤다. 이후, 개인 인적 사항 및 운전과 관련된 기본 정보(나이, 성별, 운전 경력, 자율주행 경험)에 대하여 설문을 진행하였다. 피실험자들은 연습 주행 및 제어권 전환 수행 훈련을 10분 동안 진행하였다. 훈련이 끝난 후, NDRT의 유형과 좌석 각도에 따라 총 12번의 실험을 진행하였다. 해당 실험 중 NDRT와 좌석의 각도는 무작위 순서로 진행되었다. 피실험자는 각 실험마다 NDRT를 수행한 뒤 좌석 등받이 각도에 대한 선호도에 답하였고, 제어권 전환 이후 좌석 등받이 각도에 대한 선호도, 운전준비도, 주행상황인식에 답하였다.
3.1 Reaction time
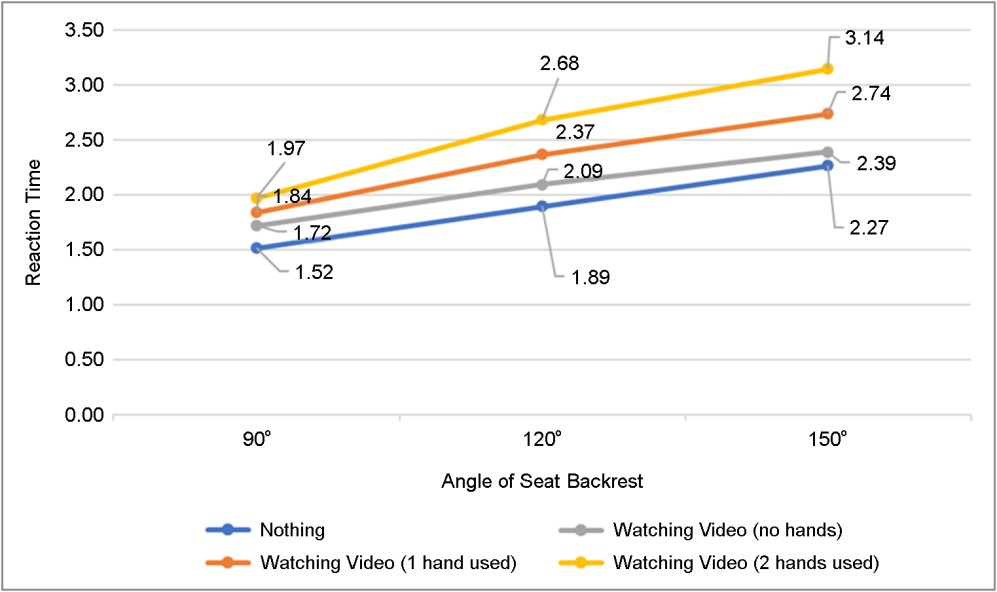
제어권 전환 반응 시간에 대한 이원배치 분산분석 결과, Table 2와 같이 유의수준 0.05에서 좌석 등받이의 각도, NDRT 유형 및 NDRT 수행 중 사용 중인 손의 개수에 따라 유의한 차이가 있는 것으로 나타났으며, 변수 간 교호작용이 존재하였다. 교호작용이 존재하기 때문에 제어권 전환 반응 시간에 대한 변수의 영향력을 검정하기 위해 post-hoc analysis를 수행하였다. Post-hoc analysis를 수행한 결과, 모든 수준 간 차이가 유의수준 0.05에서 유의한 차이가 나타났으며, 좌석 등받이 각도와 NDRT 유형에 따라 제어권 전환 반응 시간에 차이가 있다는 것을 확인할 수 있다(Table 3, Table 4).
|
Factor |
DF |
MS |
F |
p-value |
|
NDRT type |
3 |
6.60 |
57.69 |
0.000** |
|
Angle of seat backrest |
2 |
18.06 |
157.86 |
0.000** |
|
NDRT type* Angle of seat
backrest |
6 |
0.34 |
2.97 |
0.008** |
|
**p<0.01 |
||||
|
NDRT type |
NDRT type |
Mean difference |
p-value |
|
NDRT type 1 |
NDRT type 2 |
-0.165 |
0.019* |
|
NDRT type 3 |
-0.411 |
0.000** |
|
|
NDRT type 4 |
-0.694 |
0.000** |
|
|
NDRT type 2 |
NDRT type 1 |
0.165 |
0.019* |
|
NDRT type 3 |
-0.247 |
0.000** |
|
|
NDRT type 4 |
-0.530 |
0.000** |
|
|
NDRT type 3 |
NDRT type 1 |
0.411 |
0.000** |
|
NDRT type 2 |
0.247 |
0.000** |
|
|
NDRT type 4 |
-0.283 |
0.000** |
|
|
NDRT type 4 |
NDRT type 1 |
0.694 |
0.000** |
|
NDRT type 2 |
0.530 |
0.000** |
|
|
NDRT type 3 |
0.283 |
0.000** |
|
|
*p<0.05, **p<0.01 |
|||
|
Angle of seat backrest |
Angle of seat backrest |
Mean difference |
p-value |
|
90° |
120° |
-0.489 |
0.000** |
|
150° |
-0.865 |
0.000** |
|
|
120° |
90° |
0.489 |
0.000** |
|
150° |
-0.376 |
0.000** |
|
|
150° |
90° |
0.865 |
0.000** |
|
120° |
0.376 |
0.000** |
|
|
**p<0.01 |
|||
독립 변수의 조합에 따라서 제어권 전환 반응 시간의 평균 변화는 Figure 2와 같이 나타났다. Figure 2를 살펴보면, 동일한 NDRT 유형 내에서 좌석 등받이 각도가 증가함에 따라 제어권 전환 반응 시간이 증가하는 것을 볼 수 있다. 또한, NDRT 수행 중 사용 중인 손의 개수가 증가할수록 제어권 전환 반응 시간은 증가하는 것을 확인할 수 있다.
3.2 Driver readiness
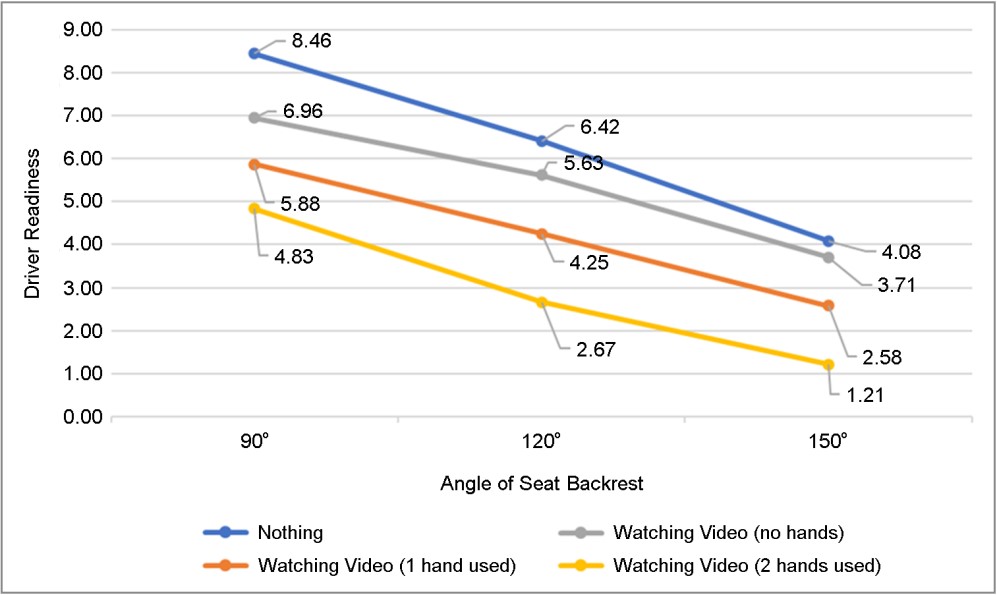
운전준비도 대한 이원배치 분산분석 결과, Table 5와 같이 유의수준 0.05에서 좌석 등받이의 각도, NDRT 유형 및 NDRT 수행 중 사용 중인 손의 개수에 따라 유의한 차이가 있는 것으로 나타났지만, 변수 간 교호작용은 존재하지 않았다.
독립 변수의 조합에 따라서 운전준비도의 평균 변화는 Figure 3와 같이 나타났다. Figure 3를 살펴보면, 동일한 NDRT 유형 내에서 좌석 등받이의 각도가 높아짐에 따라 운전준비도가 줄어드는 것을 확인할 수 있다. 그리고 동일한 좌석 등받이 각도 내에서 NDRT 중 사용 중인 손의 개수가 증가함에 따라 운전준비도가 낮아지는 것을 확인할 수 있다.
|
Factor |
DF |
MS |
F |
p-value |
|
NDRT type |
3 |
158.389 |
96.555 |
0.000** |
|
Angle of seat backrest |
2 |
317.212 |
193.375 |
0.000** |
|
NDRT type* Angle of seat backrest |
6 |
2.240 |
1.365 |
0.229 |
|
**p<0.01 |
||||
3.3 Driving situation awareness
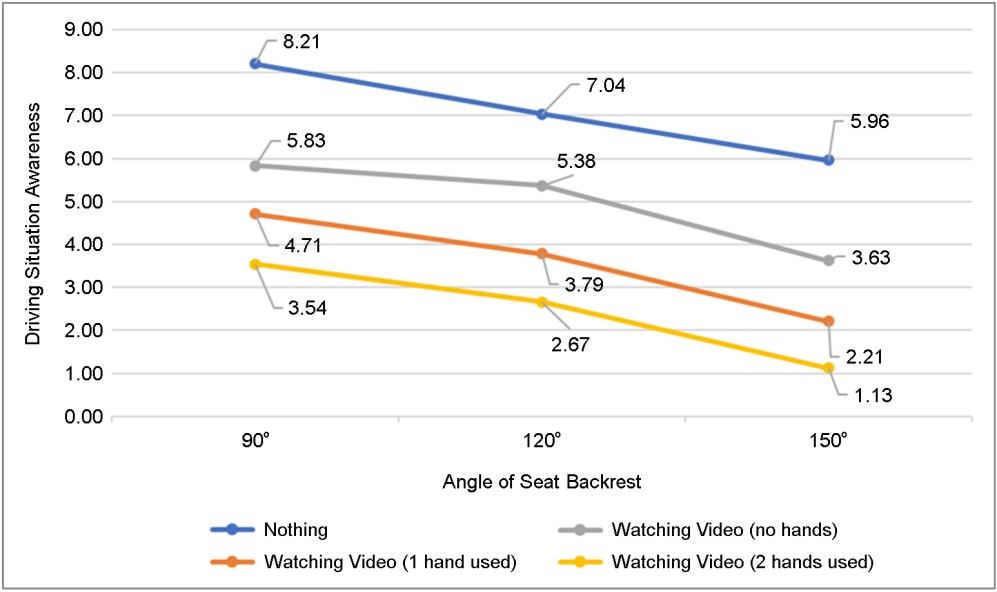
주행상황인식에 대한 분산분석 결과, Table 6와 같이 유의수준 0.05에서 좌석 등받이의 각도, NDRT 유형 및 NDRT 수행 중 사용 중인 손의 개수에 따라 유의한 차이가 있는 것으로 나타났지만, 변수간 교호작용은 존재하지 않았다.
|
Factor |
DF |
MS |
F |
p-value |
|
NDRT type |
3 |
285.375 |
136.446 |
0.000** |
|
Angle of seat backrest |
2 |
135.066 |
64.579 |
0.000** |
|
NDRT type* Angle of seat backrest |
6 |
0.747 |
0.357 |
0.906 |
|
**p<0.01 |
||||
독립 변수의 조합에 따라서 주행상황인식의 평균 변화는 Figure 4와 같이 나타났으며 이를 살펴보면, 동일한 NDRT 유형 내에서 좌석 등받이 각도가 높아질수록 운전자의 주행상황인식은 감소함을 확인할 수 있다. 그리고 동일한 좌석 등받이 각도 내에서 NDRT 중 사용 중인 손의 개수가 증가할수록 운전자의 주행상황인식 점수는 낮아지는 것을 확인할 수 있다.
3.4 Comparison of seat back angle preference before and after takeover
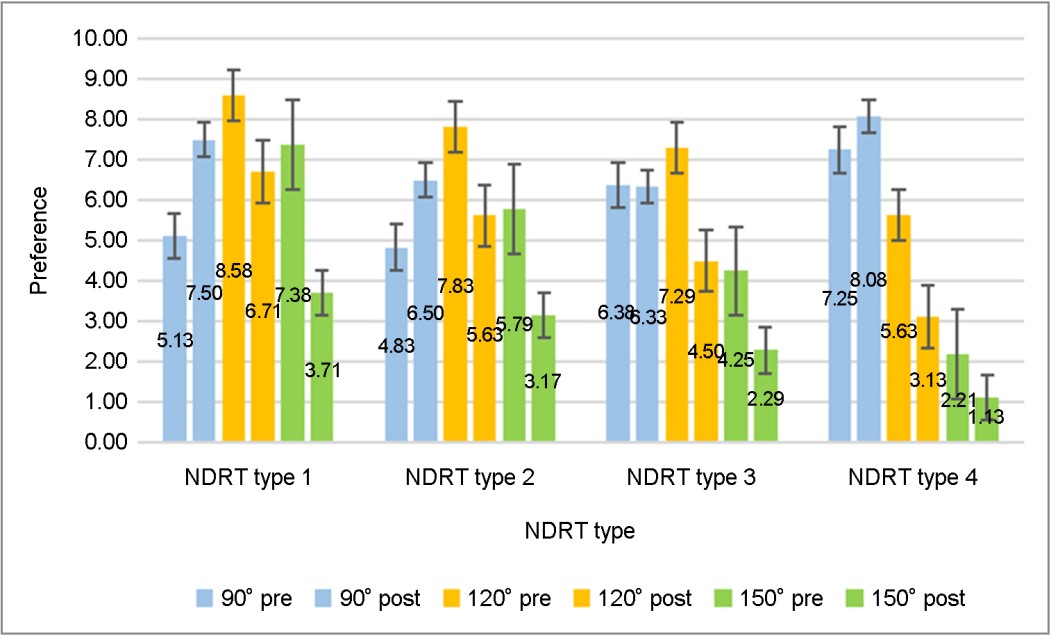
NDRT 수행을 하는데 있어서의 좌석 등받이 각도 선호도 점수는 운전자의 제어권 전환 전과 후의 점수에 대하여 paired t-test를 수행하였다. 분석 결과, 좌석 등받이 각도가 90°인 상태에서 NDRT type 3 (Watching video holding a cup of water in one hand)를 수행하였을 때를 제외한 나머지 모든 경우에서는 제어권 전환 전과 후 선호도 점수의 차이가 유의한 것으로 나타났다(Table 7).
|
Factor |
t |
p-value |
|
Pre vs. Post (90° * NDRT
type 1) |
-7.921 |
0.000** |
|
Pre vs. Post (120° * NDRT
type 1) |
6.191 |
0.000** |
|
Pre vs. Post (150° * NDRT
type 1) |
6.581 |
0.000** |
|
Pre vs. Post (90° * NDRT
type 2) |
-6.244 |
0.000** |
|
Pre vs. Post (120° * NDRT
type 2) |
6.203 |
0.000** |
|
Pre vs. Post (150° * NDRT
type 2) |
6.126 |
0.000** |
|
Pre vs. Post (90° * NDRT
type 3) |
0.153 |
0.880 |
|
**p<0.01 |
||
독립 변수의 조합에 따라서 좌석 등받이 각도에 대한 선호도의 제어권 전과 후 평균 변화는 Figure 5와 같이 나타났다. 이 중에서 좌석 등받이 각도가 120°인 상태에서 NDRT type 4에 해당하는 두 손에 물컵을 쥐고 있는 상태에서 비디오 시청을 하는 경우, 제어권 전환 전과 후의 좌석 등받이 각도에 대한 선호도의 평균 차이가 가장 크게 나타났다. 그리고 좌석 등받이 각도가 90°인 상태에서 NDRT type 4를 수행하는 경우에는 유의한 차이가 있지만 제어권 전환 전과 후의 선호도 평균의 차이가 가장 작게 나타났다.
본 연구는 NDRT 수행 중 사용 중인 손의 개수와 좌석 등받이 각도에 관한 인터랙션과 운전자의 제어권 전환에 미치는 영향을 분석하였다. 이를 통해 자율주행 차량 내에서 NDRT 수행 시 제어권 전환을 위한 운전자의 물리적인 인적 요인에 대한 가이드라인을 제시하고자 하였다. 이를 위하여 NDRT 수행 중 사용 중인 손의 개수와 좌석 등받이 각도에 따라 운전자의 제어권 전환 반응 시간을 확인하고 운전준비도, 주행상황인식을 파악하였다. 그리고 해당 상황에서 제어권 전환을 경험함에 따라 운전자의 NDRT 수행함에 있어서의 좌석 등받이 각도의 선호도에 변화가 발생하는지 확인하였다.
운전자의 NDRT 수행 시 손의 사용 개수에 따라 제어권 전환 반응 시간은 차이가 뚜렷했으며, 좌석 등받이 각도에 따라 제어권 전환 반응 시간 역시 차이 뚜렷하였다. 이는 기존의 사전 연구 결과와 일치한다(Han et al., 2019). 그리고 두 독립 변수 사이에 교호작용을 확인할 수 있었다. 특히, 좌석 등받이 각도가 150°인 상태에서 두 손에 물컵을 들고 비디오를 시청하는 경우에는 제어권 전환 반응 시간이 가장 느리게 나타났다(3.14초). 하지만 기존 연구에서는 두 독립 변수 사이의 교호작용을 확인할 수 없었다. 이에 대한 이유는 기존의 연구에서는 NDRT 자체를 두 손으로 휴대폰을 사용하여 텍스트를 입력하는 것으로 설정하였으며 휴대폰의 경우 빠르게 손에서 물건을 제거한 후, 제어권 전환을 수행할 수 있기 때문이다. 하지만, 물컵의 경우에는 제어권 전환을 수행하기 위하여 운전자의 몸 근처가 아닌 좌석 주변에 고정을 시킬 수 있는 위치에 두어야 한다. 따라서 이로 인하여 사용 중인 물건을 손에서 제거하고 적절한 위치로 두기 위한 시간의 차이가 발생하였고 본 실험 내에서 교호작용이 확인되었다. 이는 영상 시청 시, 음료 및 음식 섭취를 하기 위하여 두 손에 물건을 쥐고 있는 경우 제어권 전환 반응 시간에 영향을 줄 수 있는 가능성을 보여준다.
운전준비도에서도 NDRT 수행 시 손의 사용 개수에 따라 평균 차이가 뚜렷했으며, 좌석 등받이 각도에 따라 운전준비도 역시 차이 뚜렷하였다. 주행상황인식도 마찬가지로 NDRT 수행 시 손의 사용 개수에 따라 제어권 전환 반응 시간은 차이가 뚜렷했으며, 좌석 등받이 각도에 따라 제어권 전환 반응 시간 역시 차이 뚜렷하였다. 두 종속 변수 모두 교호작용은 존재하지 않았다. 운전자는 좌석의 각도가 높아질수록 운전대를 잡기 위해 흉부에 가해지는 힘이 더욱 소모되며(Bush and Hubbard, 2007), 전방 시야를 한 번에 동작으로 확인하기 어렵다(Han et al., 2019). 운전자들은 손에 빠르게 제거하기 어려운 물건을 쥐고 있는 경우 운전에 준비가 되지 않았음을 느끼며 동시에 주행상황인식이 잘되지 않음을 확인할 수 있다. 또한, 좌석의 각도가 높아질수록 운전자들의 운전준비도는 낮아지며, 주행 상황 역시도 잘 인식이 되지 않음을 확인할 수 있다.
NDRT를 수행하는 좌석 등받이 각도에 대한 제어권 전환 전과 후의 선호도 차이 분석 결과, 90°인 상태에서 한 손에 물컵을 쥔 상태로 영상을 시청하는 경우를 제외하고는 유의수준 0.05 내에서 유의하였다. 좌석 등받이 각도가 90°인 상태에서는 NDRT type 3 (Watching video holding a cup of water in one hand)를 제외하고 좌석의 선호도가 상승하는 것을 확인하였다. 좌석 등받이 각도가 120°와 150°인 경우에는 모든 NDRT type에서 제어권 전환 후 선호도가 하락하는 것을 확인하였다.
레벨 3에 해당하는 조건부 자율주행차 내에서 운전자는 언제든지 수동주행에 개입할 수 있는 준비가 되어 있어야 한다. 하지만 운전자가 주행 상황에 대한 모니터링에 대한 의무가 없기 때문에, 미래에 차량 내에서 운전자는 자율주행 시 운전 외 작업을 주로 수행할 것이다. 하지만 운전자의 운전 외 작업을 수행하는 물리적 상황은 운전자의 제어권 전환 반응 시간과 운전준비도, 그리고 주행상황인식에 영향을 미치는 것으로 나타났다. 운전 외 작업을 수행 시 물건을 쥐고 있는 손의 개수가 많아질수록 수동주행으로 제어권을 전환 반응 시간과 운전준비도, 주행상황인식에 부정적인 영향을 미치는 것으로 파악되었다. 또한, 차량 내 좌석 등받이 각도가 높아질수록 제어권 전환 반응 시간과 운전준비도, 주행상황인식에 부정적인 영향을 미치는 것으로 파악되었다. 이를 통해, 자율주행 차량 내 운전자 모니터링 시스템 설계 시 사용자의 운전 외 작업의 물리적인 상황에 대한 확인이 필요함을 알 수 있다.
본 연구를 통해 도출된 운전자의 운전 외 작업 중 사용 중인 손의 개수와 좌석 등받이 각도가 제어권 전환에 미치는 영향에 대한 결과를 통해 향후 조건부 자율주행 인적 요인 가이드라인 제작 시 도움이 되는 자료로 활용될 수 있다.
본 연구의 한계로는 비디오 시청 시 손에 물건을 쥐고 있는 상태에서 좌석 등받이 각도에 따른 제어권 전환 반응 시간 및 운전준비도와 주행상황인식, 선호도 차이에 대하여는 본 연구를 통해 확인하였지만, 정교한 인적 요인 가이드라인 및 운전자 모니터링 시스템을 설계하기 위해서는 이번 연구 결과를 바탕으로 다양한 NDRT 수행 중 좌석 등받이 각도를 달리하여 제어권 전환에 미치는 영향을 확인하는 후속 연구가 필요하다. 또한, 일반적인 물건을 쥐는 상태뿐만 아니라 한 손 혹은 두 손으로 핸드폰을 이용하는 것과 같이 손을 사용하는 방식의 차이에 따른 후속 연구가 필요하다.
References
1. Bush, T.R. and Hubbard, R.P., Support force measures of midsized men in seated positions. Journal of Biomechanical Engineering, 129(1), 58-65, 2007.
Google Scholar
2. Han, H., Jeong, S. and Yang, J.H., Comparison of non-driving behaviors when responding take-over requests in automated driving. Transactions of KSAE, 27(9), 677-686, 2019.
3. Kim, H., Kim, W., Kim, J., Lee, S.J. and Yoon, D., Design of driver readiness evaluation system in automated driving environment. In 2018 International Conference on Information and Communication Technology Convergence (ICTC) (pp. 300-302). IEEE, 2018.
Google Scholar
4. Kim, H., Kim, W., Kim, J., Lee, S.J. and Yoon, D., A study on the effects of providing situation awareness information for the control authority transition of automated vehicle. In 2019 International Conference on Information and Communication Technology Convergence (ICTC) (pp. 1394-1396). IEEE, 2019.
Google Scholar
5. Kim, H.S., Kim, W., Kim J., Lee, S.J. and Yoon, D.S., A study on the Effect of Situation Awareness and Drive Readiness on Control Authority Switching in Automated Driving. Electronics and Telecommunications Research Institute, 783-784, 2020.
6. Kim, J., Kim, W., Kim, H.S. and Yoon, D., A study on the correlation between subjective driver readiness and NDRT Type during automated driving. In 2020 International Conference on Information and Communication Technology Convergence (ICTC) (pp. 1774-1776). IEEE, 2020.
Google Scholar
7. Kwon, D. and Jung, E.S., Effects of Modalities of Non-driving Related Tasks on Driver's Stress and Driving Performance during Autonomous Driving. Journal of the Ergonomics Society of Korea, 38(3), 2019.
8. Naujoks, F., Hergeth, S., Wiedemann, K., Schömig, N. and Keinath, A., Use cases for assessing, testing, and validating the human machine interface of automated driving systems. In Proceedings of the human factors and ergonomics society annual meeting (Vol. 62, No. 1, pp. 1873-1877). Sage CA: Los Angeles, CA: Sage Publications, 2018.
Google Scholar
9. Naujoks, F., Purucker, C., Wiedemann, K. and Marberger, C., Noncritical state transitions during conditionally automated driving on german freeways: Effects of non-driving related tasks on takeover time and takeover quality. Human Factors, 61(4), 596-613, 2019.
Google Scholar
10. Parida, S., Mallavarapu, S., Franz, M. and Abanteriba, S., A literature review of seating and body angles for non-driving secondary activities in autonomous driving vehicles. In International Conference on Applied Human Factors and Ergonomics (pp. 398-409). Springer, Cham, 2018.
Google Scholar
11. Seif, H.G. and Hu, X., Autonomous driving in the iCity—HD maps as a key challenge of the automotive industry. Engineering, 2(2), 159-162, 2016.
Google Scholar
12. Walch, M., Lange, K., Baumann, M. and Weber, M., Autonomous driving: investigating the feasibility of car-driver handover assistance. In Proceedings of the 7th international conference on automotive user interfaces and interactive vehicular applications (pp. 11-18), 2015.
Google Scholar
PIDS App ServiceClick here!