eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Jong Hyun Kim
, Jae Soo Hong
10.5143/JESK.2024.43.1.75 Epub 2024 March 05
Abstract
Objective: The aim of this study was to analyze and validate the stability of turning during cycling by simulating the key muscle activities of the rider during the turning process. This research aimed to contribute to the development of recreational assistive devices that enable elderly individuals and those with disabilities to enjoy leisure activities with their families.
Background: The development of assistive devices for the elderly and individuals with disabilities has gained significant importance in fostering inclusive leisure activities. Simulations have proven to be valuable tools in research for effectively assessing the safety and stability of such devices. In this context, this study specifically aimed to simulate a two-person tricycle designed for use by a family member riding with an elderly individual or a person with a disability. Furthermore, previous research has identified steering stability as a high-priority element in the analysis of safety design components using the Analytic Hierarchy Process (AHP).
Method: To evaluate the stability of turning during cycling, the study utilized the AnyBody Modeling System. This system was employed to simulate the muscle activities in specific human body parts, including the lower limb, upper limb, and trunk body, under eight different turning conditions. These conditions encompassed two different speeds (5km and 10km) and four steering angles (5°, 10°, 15°, and 20°). The simulations were conducted with five moving parts remaining constant including the saddle and pelvis, both feet and the pedal, and both hands and the handle.
Results: The results of the simulations revealed that muscle activities increased as both speed and steering angle increased. Specifically, for the upper limb and the trunk body, muscle activities exhibited a greater increase as the steering angle became larger. Notably, the upper limb muscle activities showed an approximately three-fold increase at 5km and a 5° steering angle, in contrast to 20°. Similarly, at 10km, a two to three-fold increase in muscle activities was observed.
Conclusion: Through the analysis of the muscular activity that places a burden on the driver's upper body and arms during steering, we have obtained data for improving steering structure, steering control during cornering, and driving guidelines.
Application: The application of the human modeling system employed in this study holds significant potential for assessing the stability of novel assistive devices that lack predetermined specifications. This methodology can be invaluable in the development and validation of new innovative devices.
Keywords
Tricycle tandem Elderly and persons with disability Anybody Human body dynamics Muscle activity Steering angle
노인과 장애인의 사회적 참여 범위가 점점 확대되고 있으며, 보조 기기 관련 기술의 개발은 이들의 사회 참여 활동을 더욱 가속화 시키고 있는 상황이다(Kim et al., 2021). 노인과 장애인의 보다 높은 차원으로의 삶의 질 향상과 개선을 위한 여가 보조 기기 개발은 노인과 장애인의 여가생활을 지원하고, 사회 참여를 유도하여, 지속적으로 사회와 연계된 삶을 영위할 수 있게 지원하는 방향으로 보조 기기 기술 개발 트렌드가 변화하고 있다(Shin et al., 2022).
가족들, 사랑하는 사람들과 함께 즐기는 여가는 삶의 질 향상 차원에서 매우 중요한 요소로 이는 노인과 장애인, 그들 가족들에게 깊은 유대감 형성과 정서적 만족을 제공하며, 소중한 추억을 간직할 수 있는 기회이다. 이들을 위한 여가 보조 기기 개발에서 가장 중요한 개발 요소는 안전성이다(Kim and Hong, 2023). 안전사고에 취약한 이들을 위해 설계 요소들의 안전성과 사용편의성을 확보하기 위한 규격 정의, 설계 사양, 사용 가이드라인에 대한 연구는 매우 중요한 연구이다.
근골격 인체 모델 시뮬레이션과 같은 디지털 휴먼 모델링 및 시뮬레이션 연구는 인간의 생체역학적 및 생리적, 행동적 특성을 수치화하여 컴퓨터에서 재현하는 기술이다(Wang and Lau, 2013; Ziolek and Kruithof, 2000). 이와 같은 기술들은 종전에 없던 제품을 개발할 때, 매우 강력한 도구로 설계 사양, 사용 조건의 변경에 따라 제품 사용 안전성과 사용편의성을 평가할 수 있는 효과적인 연구 방법이다(Peruzzini et al., 2017; Ji et al., 2023). 설계와 성능 사양을 포함하는 표준과 규격이 부재한 신제품들은 시뮬레이션을 통한 안전과 사용에 대한 가이드라인을 제안할 수 있으며 제품 개발 근거 데이터로 활용될 수 있다. 또한 환경과 사용 조건에 따라 안전성을 효과적으로 평가할 수 있는 도구로 활용된다(Akyeampong et al., 2013; Högberg et al., 2007; Park et al., 2023; Vyavahare and Kallurkar, 2015).
본 연구에서는 노인과 장애인이 그들 가족과 함께 탑승하여, 즐길 수 있는 2인승 역 삼륜 자전거를 대상으로 시뮬레이션 연구를 수행하였다. 자전거 타기는 남녀노소 누구나 즐길 수 있는 대중적이며, 접근성이 수월한 여가 활동이다. 이와 같은 여가 보조 기기들은 국내 개발 제품이 없고, 관련 규격이나 연구가 미흡한 편이다(Shin et al., 2022; Kim et al, 2021). 일부 관련 연구들은 구동 시뮬레이션 연구에 국한되어 사용자의 운동과 활동에 대한 인체 시뮬레이션 연구는 미흡한 편이다.
따라서 노인과 장애인, 그들 가족들을 위한 2인승 역 삼륜 자전거의 사용에서 탑승자의 안전을 담보할 수 있는 제품 개발 방향 설정을 위한 목적으로 근골격 인체 모델 시뮬레이션을 수행하였다. 2인승 역 삼륜 자전거의 여러 가지 안전 요소 중에 조향 각도와 속도 조건에 대한 근활성도 시뮬레이션을 수행하였다. 이는(Shin et al., 2022) 선행연구의 안전 설계 요소별 우선순위 결과를 토대로 정의되었다.
참고로 선행연구에서 AHP (Analytic Hierarchy Process) 활용하여, 2인승 역 삼륜 자전거의 10가지 안전 설계 요소들 간의 중요도 분석 결과, '제동 성능'이 중요도 0.233으로 가장 우선순위가 높은 안전 설계 요소로 나타났으며 다음으로는 '조향 각도 및 안정성'은 0.137, '인간공학적 치수 적용'은 0.132, '구동계 보호 덮개'는 0.090, '조명 안전 규격'은 0.028 등으로 나타났다. 이는 2인승 역 삼륜 자전거 형태가 전방으로 무게 중심이 치우쳐 있으며, 전방 탑승자와 좌석 프레임 등으로 선회 주행의 안전성을 담보하기 어려우며, 조향 유지하는 운전자의 근육 부담이 높을 것으로 판단된 결과이다(Shin et al., 2022).
2.1 Anybody modeling system
본 연구에서 활용한 AnyBody Modeling System (AMS)은 근골격계 시뮬레이션 도구로서 제공되는 모델을 이용하여 다양하게 수정 응용이 가능하다. AMS는 역동역학 기반의 근골격 모델 해석 소프트웨어이다. 인체 모델의 근력(Muscle force), 근활성도(Muscle activity), 관절 반발력 등 인체 내부의 값을 계산하는 것을 기반으로 제품 개발 및 최적화에 활용 가능한 근골격 모델링 소프트웨어이다(Jung, 2012).
AMS는 900개 이상의 근육으로 구성된 근골격 모델을 제공하며, AMS는 실제 사람의 키, 체중, 체지방률 입력이 가능한 인체 근골격 모델을 제공한다. 모션 캡처 데이터 등의 활용을 통해 사용자가 직접 모델을 수정하는 것도 가능하며, 본 연구에서는 선행연구의 구조 역학 결과를 활용하였다(Shin et al., 2022). 또한 다른 기기와의 데이터 호환을 지원하여 사용자가 수집한 지면 반력 데이터 등의 입력과 데이터 추정 기능도 제공한다. AMS에서 제공하는 라이브러리 모델을 통한 역동역학 해석도 가능하다(Kang and Kim, 2023).
2.2 Dynamics of a Two-Person Tricycle to collect input data
본 연구에서는 2인승 역 삼륜 자전거의 조향 시 근활성도를 시뮬레이션 하기 위하여, 2인승 역 삼륜 자전거 모델을 Solidworks로 모델링하였다. 전륜 2개와 후륜 1개 구조의 역삼륜 구조로 설계되었다. 전륜부에는 휠체어 탑승이 가능한 구조로 설계되었다(Figure 1). 2인승 역 삼륜 자전거 모델에 대한 동역학 시뮬레이션(RecurDyn)을 수행한 후 AMS에서 필요한 자전거 부위별 자유도 값, 3개의 바퀴가 지면으로부터 받는 힘, 역 삼륜 자전거와 탑승자의 질량, 질량 중심 위치 및 관성 정보, 페달과 탑승자 발 사이에서 작용하는 힘에 대한 입력 정보를 수집하였다(Table 1).
|
Conditions |
Input data of anybody modeling
system |
|
|
Speed |
Steering angle |
|
|
5km/h |
5°, 10°, 15°, 20° |
- Freedom of movement data by tricycle - Component force exerted by both feet on the pedals. - The force applied to a tricycle wheel from the ground. - Tricycle and rider weight distribution and moment of inertia
information. |
|
10km/h |
5°, 10°, 15°, 20° |
|
동역학 해석 모델에서 주행 시 탑승자가 자세, 질량 중심이 이동되는 관성을 무시하였다. 뒷좌석 탑승자의 무게 중심 위치는 안장으로 약 15cm으로 정의하였고, 전방 탑승자(노인 또는 장애인)의 체중은 휠체어를 포함하여 80kg, 후방 탑승자(일반인 가족)의 체중은 65kg으로 정의하였다. 속도는 5km/h와 10km/h, 선회 방향은 왼쪽(좌회전), 조향 각도 제어는 5°, 10°, 15°, 20°로 정의하여, 목표한 각도로 제어하는 시간은 동일하게 1초로 설정하였다. 속도 2가지 조건과 조향 각도 4가지 조건 총 8가지 조건에서 AMS의 입력 데이터를 수집하였다(Table 1).
2인승 역 삼륜 자전거의 동역학 해석 결과로 수집한 AMS 입력 데이터의 경향은 다음과 같이 나타났다. 첫 번째로 속도와 조향 각도가 증가할수록 조향에 필요한 토크가 증가하는 경향을 나타났다. 두 번째로 전륜 2개가 지면으로부터 측 방향 힘이 선회 반경 안쪽으로 발생하는 것으로 나타났으며, 이는 속도와 조향 각도가 증가할수록 밖에서 안으로 작용하는 힘은 증가하는 것으로 나타났다. 세 번째로 조향 이후 각도를 유지하기 위하여 조향 반대 방향으로 힘 방향이 전환되는 경향을 나타냈다.
2.3 Modeling for muscle activity simulation
본 연구에서는 2인승 역 삼륜 자전거의 동역학 해석을 통해 수집한 해석 결과를 AnyBody Modeling System의 입력 값으로 활용하였다(Table 1). 근활성도 시뮬레이션을 위한 AMS 모델에 2인승 역 삼륜 자전거는 크게 4개의 부분으로 단순화하여 구분하였다(① 바퀴 부분, ② 크랭크 및 페달 부분, ③ 뒤쪽 프레임, ④ 앞쪽 프레임(탑승자 포함)). AMS에서도 자전거의 동역학 해석과 마찬가지로 2가지 속도와 4가지 조향 각도의 총 8가지 선회 조건에서 특정 인체 부위(몸통, 상지, 하지)의 근활성도 시뮬레이션을 수행하였다. 몸통(Trunk body), 상지(Upper limb), 하지(Lower limb) 근활성도는 다양한 근육들의 통합 과정에서 최대값 분석을 활용하였고, 3가지 인체 부위의 세부 근육들의 구성은 다음과 같다. 첫 번째로 몸통 부위는 척추기립근(Erector spinae), 복직근(Rectus abdominis) 이렇게 2가지 근육들의 근활성도를 통합 분석하였다. 두 번째로 상지는 승모근(Upper trapezius), 상완이두근(Biceps brachii), 삼두근(Triceps), 측면삼각근(Deltoideus lateralis), 요측수근굴근(Flexor Carpi), 지신근(Digitorum) 이렇게 6가지 근육들의 근활성도를 통합 분석하였다. 세 번째로 하지는 대퇴직근(Rectus femoris), 대퇴이두근(Biceps femoris), 비복근(Gastrocnemius), 비장근(Soleus), 전경골근(Tibialis anterior), Semitendinosus(반건양근) 이렇게 6가지 근육들의 근활성도를 통합 분석하였다. 근활성도의 결과 값 단위는 %MVC (Maximum voluntary contraction)로 분석하였다.
근활성도 시뮬레이션 결과에 대한 반복성과 재현성을 담보하기 위하여, 자전거와 접촉되는 인체 부위를 고정하여, 자전거와 인체의 움직임이 상호작용하도록 정의하였다. 이렇게 고정된 인체와 자전거 부분은 자전거 안장과 엉덩이, 양 발과 양쪽 페달, 양 손과 핸들로 5개 위치를 고정하여 시뮬레이션을 수행하였다(Figure 1).
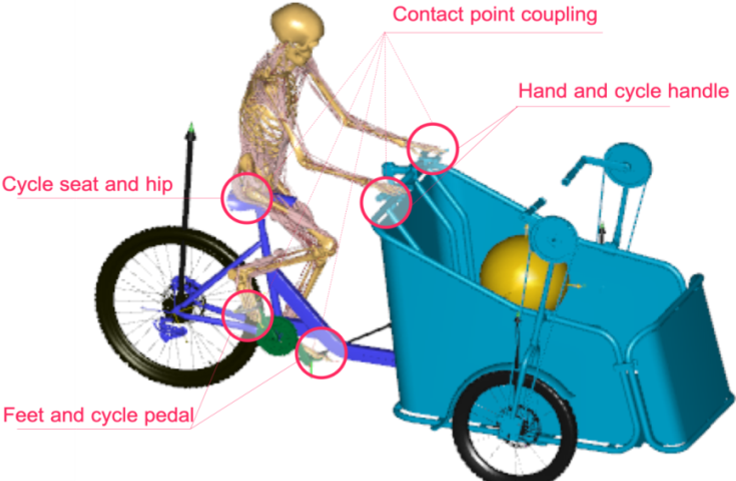
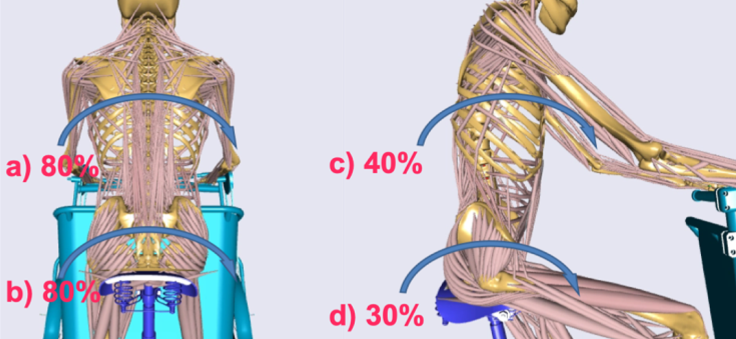
(Figure 1) 처럼 탑승자의 손과 발, 엉덩이가 자전거에 고정되어, 상체의 움직임 범위가 제한적일 수박에 없으므로, (Figure 2) 처럼 고정을 유지할 수 있는 조건으로 상체 움직임을 다음과 같이 제한하였다. (Figure 2(a))의 몸통(Thorax) 회전 범위(Rotation ROM)와 (Figure 2(b))의 골반(Pelvis) 회전 범위(Rotation ROM)는 두 가지 부위 모두 80%를 제한하였다. 그리고 (Figure 2(c))의 몸통 굴곡 범위(Flexion ROM)은 40%, (Figure 2(d))의 골반의 굴곡 범위는 30%로 제한하였다.
3.1 Result of muscle activity simulation by steering angle at 5km/h
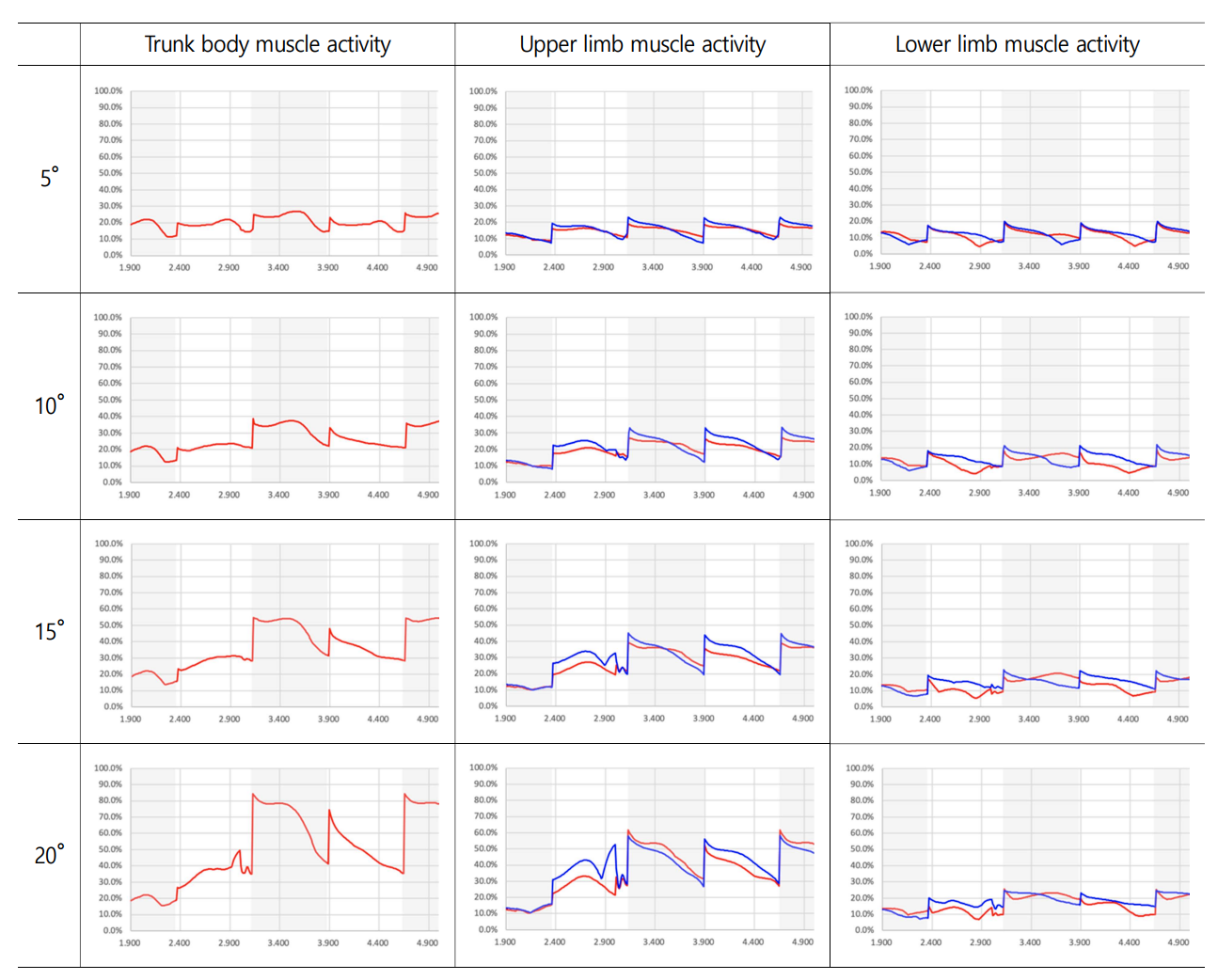
주행 속도 5km/h에서 4가지 조향 각도별 근활성도 분석 결과는 다음과 같다. 조향 각도(Steering angle)가 5°에서는 몸통(Trunk body)은 20% 정도, 상지(Upper limb)는 10~20%, 하지(Lower limb)는 5~20% 정도의 근활성도가 나타났다. 10°에서는 몸통은 30% 정도로 10~40% 범위에서 근활성도가 나타났다. 상지는 10~30%, 하지는 5~20% 정도의 근활성도가 나타났다. 15°에서는 몸통은 최대 55% 정도로 높은 근활성도를 나타냈으며, 35% 정도로 나타났다. 상지는 3초 이후에는 20~45% 정도로 나타났다. 하지는 5~20% 정도의 근활성도가 나타났다. 20°에서는 몸통의 근활성도는 최대 85%까지 나타났으며, 3초 이후에는 40~85% 범위에서 근활성도가 나타났다. 상지의 근활성도는 최대 60%까지 나타났으며, 3초 이후에는 30~60% 범위에서 나타났다. 하지는 5~25% 정도 범위에서 근활성도가 나타났다(Figure 3).
3.2 Result of muscle activity simulation by steering angle at 10km/h
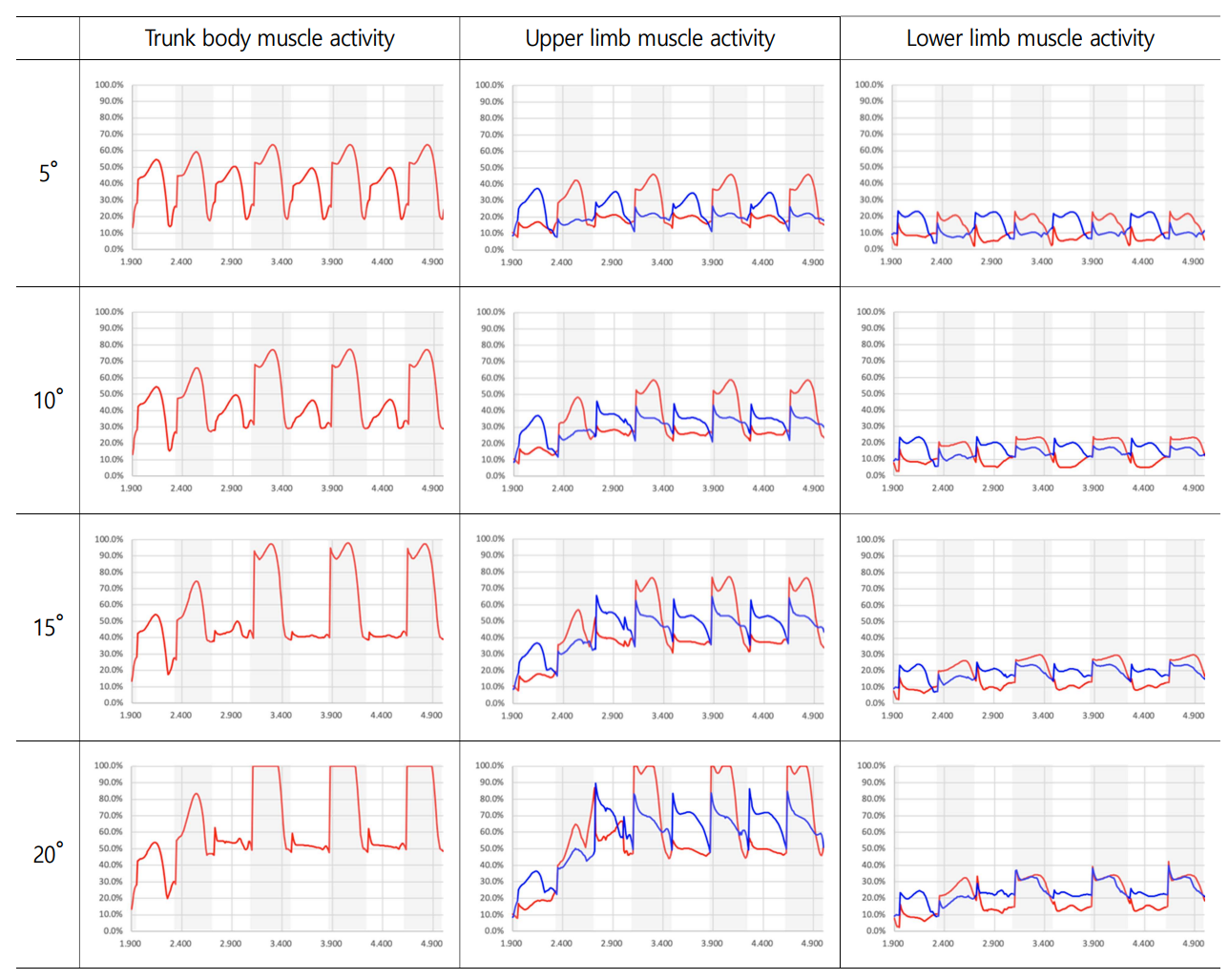
주행 속도 10km/h에서 4가지 조향 각도별 근활성도 분석 결과는 다음과 같다. 조향 각도(Steering angle)가 5°에서는 몸통(Trunk body)은 60% 정도, 상지(Upper limb)은 35~45%, 하지(Lower limb)는 좌 · 우 다리가 교차하며, 20~25% 정도의 근활성도가 나타났다. 10°에서는 몸통은 최대 80% 정도의 근활성도가 나타났다. 상지는 우측은 최대 60%, 좌측은 최대 45%의 근활성도가 나타났다. 하지는 좌 · 우 다리가 교차하며, 20~25% 정도의 근활성도가 나타났다. 15°에서는 몸통은 최대 98% 정도로 높은 근활성도가 나타났다. 상지는 3초 이후에는 우측은 최대 78%, 좌측은 최대 65%의 근활성도가 나타났다. 하지는 좌 · 우 다리가 교차하며, 25~30% 정도의 근활성도가 나타났고, 근소하게 우측이 더 높은 근활성도가 나타났다. 20°에서는 3초 이후 왼쪽 페달을 밟을 때, 몸통의 근활성도는 최대 100% 이상으로 나타났다. 상지는 3초 이후에는 우측은 최대 100% 이상, 좌측은 최대 85~90% 정도의 근활성도가 나타났다. 하지는 좌 · 우 다리가 교차하며, 30~40% 정도의 근활성도가 나타났다(Figure 4).
본 연구에서는 근골격 시뮬레이션을 활용하여, 2인승 역 삼륜 자전거의 선회 주행 시 조향 각도를 조정하는 운전자의 근활성도 분석을 수행하였다. 근활성도 시뮬레이션 결과를 보면 등속 선회 주행에서 몸통(배, 허리)과 상지의 근활성도가 크게 증가하는 것을 확인할 수 있었다. 이는 선회 주행에서 바깥 쪽으로 몸이 벗어나려는 힘을 상체와 상지로 버티면서 페달 운동을 한 결과로 판단된다.
몸통의 근활성도는 속도와 조향 각도가 증가할수록 크게 높아지는 경향을 나타냈다. 속도가 5km/h, 조향 각도가 15도 이상일 때는 근활성도가 50% 이상을 나타냈으며, 속도가 10km/h, 조향 각도가 5도일 때는 근활성도가 50% 이상으로 높아지는 경향을 나타냈다. 또한 15도와 20도에서 근활성도가 각각 100%와 100% 이상으로 나타났다.
상지의 근활성도 결과도 몸통과 유사하게 나타났다. 속도와 조향 각도가 증가할수록 근활성도가 높아지는 경향을 나타냈다. 좌측 방향으로 선회 주행의 시뮬레이션을 수행한 본 연구에서는 바깥쪽인 오른쪽 상지 근활성도가 왼쪽보다 더 높게 나타났다. 5km/h의 20도에서 근활성도는 50%를 넘었고, 10km/h의 속도에서는 10도일 때부터 근활성도가 50% 이상으로 나타났고, 20도 일 때 오른쪽 상지의 근활성도는 100% 이상으로 나타났다.
하지의 근활성도는 선회 주행에서 조향 각도가 증가함에도 큰 영향을 받지 않는 것으로 나타났다. 속도가 증가함에 따라 모든 조향 각도 조건에서 근활성도가 5~10% 정도 증가하는 경향을 나타냈다.
2인승 역 삼륜 자전거는 일반 자전거보다 무겁고, 부피가 크며, 무게 중심이 전방에 쏠려 있어, 운전자의 페달링이 힘들고, 조향 제어가 힘들다. 본 연구에서는 평지 조건에서 운전자의 페달링(수동 구동)으로 시뮬레이션 하였으나, 실제 시제품에서는 페달링에 대한 운동은 전동 모터(전동 구동) 등으로 보조하여, 개발될 예정이다. 그러나 본 연구의 시뮬레이션 결과에서 나타났듯 구동에 대한 부담보다는 선회 주행에서 운전자의 조향 조작 부담은 매우 큰 것을 확인할 수 있었다. 기존의 선행연구들에서도 운전자(작업자)는 근활성도(%MVC)가 50%가 넘으며, 힘든 작업으로 인식한다. 그리고 근활성도가 60%를 넘으면 진짜 힘든 작업으로 인식한다(Harrington et al., 2023; Kong et al., 2019; Troiano et al., 2008).
시뮬레이션 결과를 살펴보면 몸통과 상지의 근활성도를 50% 이하로 유지하며, 선회 주행을 하기 위해서는 속도를 5km/h로 유지해야 하는 것으로 나타났다. 이는 성인의 보행 속도(4~4.5km/h)와 유사한 속도로 선회 주행에서는 보행 속도와 유사하거나 더 느린 속도로 주행해야 하고 조향 조작은 급격하게 조작하기 보다는 미리 조금씩 각도를 줄여가는 방식으로 선회 주행해야 한다. 특히나 본 연구의 대상 제품은 전방에 탑승자가 노인이나 장애인으로 위험 상황에 대한 대처가 일반인보다 어려워, 사고 예방을 위해서도 안전 속도 유지, 선회 주행 시 조향 각도를 줄이면서 운전하는 주행 가이드라인 개발이나 조향 구조에서 사용자의 부담을 줄일 수 있는 구조로 설계 변경이 필요할 것으로 사료된다.
본 연구에서는 노인과 장애인을 위한 2인승 역 삼륜 자전거의 선회 주행에서 운전자의 몸통과 상지, 하지의 근활성도 시뮬레이션 연구를 수행하였다. 실제로 AMS를 활용하여 근활성도를 시뮬레이션한 데이터 기반으로 근골격 보조 기기 개발 및 인간공학적 작업 설계에 활용한 연구들로 작업 공정 설계(Atici et al., 2017), 근골격 보조 로봇 개발(Fritzsche et al., 2021; Kong et al., 2022)에 대한 연구들이 수행되었었고, 설계 요소를 최적화하는 용도로 활용되어 왔다. 이와 같은 시뮬레이션의 목적은 신제품 개발과정에서 사용자(운전자)의 사용성과 탑승자(노인과 장애인) 안전을 담보하기 위한 것으로 안전 주행 가이드라인, 제품 개발 방향을 설정하는 근거 데이터로 활용하기 위함이다. 시뮬레이션 연구 수행 전에 설계(디자인) 안에 대한 전문가 평가에서 조향과 주행 속도 제어가 가장 중요한 사용 및 안전상의 설계 요소로 도출되었고, 이와 같은 배경으로 시뮬레이션 연구를 수행하게 되었다.
본 연구 결과에서 나타나듯 일반 자전거의 비해 선회 주행에서 운전자의 상체와 상지에 상당히 부담이 되는 근활성도 분석 결과가 나타났고, 이와 같은 연구 결과를 통해 조향 각도를 제어하는 방식에 대한 설계 변경, 운전자의 선회 주행에서 안전 속도와 조향 제어, 주행 방식에 대한 가이드라인의 근거 데이터를 확보할 수 있었다.
따라서 본 연구에서 전방에 탑승자가 있고, 후방에서 운전하는 구조의 2인승 역 삼륜 자전거의 안전성과 운전자의 사용성을 향상하기 위하여 선회 주행의 안전성을 확보할 수 있는 근거 데이터와 사용자 친화적인 설계를 위한 구조 변경에 대한 근거를 마련하였다. 본 연구의 근골격 시뮬레이션 연구 방법과 결과는 향후 개선 구조의 검증, 새로운 제품의 평가, 위험한 실험 평가 방식 등을 대체하여, 다양하게 활용될 수 있을 것으로 기대된다.
References
1. Akyeampong, J., Nevins, L. and Udoka, S., Using digital human modeling to enhance work visibility for excavator. IIE Annual Conference and Expo, 2013, 1909-1918, 2013.
Google Scholar
2. Atici, H., Gonen, D., Oral, A. and Kaya, B., Ergonomic Analysis of an Assembly Line Using the AnyBody Modeling System, 3rd World Congress on Mechanical, Chemical, and Material Engineering, 2017. DOI: 10.11159/icmie17.125
Google Scholar
3. Fritzsche, L., Galibarov, P.E., Gärtner, C., Bornmann, J., Damsgaard, M., Wall, R., Schirrmeister, B., Gonzalez-Vargas, J., Pucci, D., Maurice, P., Ivaldi, S. and Babič, J., Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System, Wearable Technologies, 2, 2021. doi: 10.1017/wtc.2021.5
Google Scholar
4. Harrington, J.W., Anguiano-Hernandez, J.Z. and Kingston, D.C., Muscle activation and rating of perceived exertion of typically developing children during DRY and aquatic treadmill walking, Journal of Electromyography and Kinesiology, 68, 2023.
Google Scholar
5. Högberg, D., Bäckstrand, G., Lämkull, D., De Vin, L.J., Case, K., Örtengren, R., Hanson, L. and Berlin, C., Towards dynamic ergonomics analysis of work sequences in virtual environments. Proceedings of the 17th International Conference on Flexible Automation and Intelligent Manufacturing, 2007.
Google Scholar
6. Ji, X., Hettiarachchige, R.O., Littman, A.L. and Piovesan, D., Using digital human modelling to evaluate the risk of musculoskeletal injury for workers in the healthcare industry. Sensors, 23(5), 2781, 2023.
Google Scholar
7. Jung, M.G., Musculoskeletal human body model simulation using AnyBody Modeling System, Korean Journal of Computational Design and Engineering, 18(2), 38-46, 2012.
8. Kang, H.S. and Kim, J.H., Optimization of Hip Flexion/Extension Torque of Exoskeleton During Human Gait Using Human Musculoskeletal Simulation, Journal of Korea Robotics Society, 18(1), 117-121, 2023.
9. Kong, Y.K., Choi, K.H., Cho, M.U., Kim, S.Y., Kim, M.J., Shim, J.W., Park, S.S., Kim, K.R., Seo, M.T., Chae, H.S. and Shim, H.H., Ergonomic Assessment of a Lower-Limb Exoskeleton through Electromyography and Anybody Modeling System, International Journal of Environmental Research and Public Health, 19, 2022.
Google Scholar
10. Kong, Y.K., Lee, J.H., Lee, J.H., Shin, J.M. and Choi, K.H., Perceived level of exertion compared to actual grip force exertion: The 50% phenomenon, Human Factors and Ergonomics in Manufacturing & Service Industries, 1-7, 2019. DOI: 10.1002/hfm.20808
Google Scholar
11. Kim, J.H. and Hong, J.S., Muscle Activity Analysis according to Steering Angles during the Turning of a Two-Person Tricycle for the Elderly and Persons with Disability, International Conference on Precision Engineering and Sustainable Manufacturing, 2023.
12. Kim, J.H., Hong, J.S., Lee, H.K., Sim, W.J. and Jung, D.Y., Development of Hand-Bike Design Guideline for Elderly and Disabled Person, The HCI Society of Korea, 682-684, 2021.
13. Park, J.B., Kim, M.J., Jung, H.Y., Park, C.S., Cui, X., Lee, S.W. and You, H.C., The Advancement Trend of Digital Human Modeling and Simulation, Journal of the Ergonomics Society of Korea, 42(5), 509-521, 2023.
14. Peruzzini, M., Carassai, S., Pellicciari, M. and Andrisano, A.O., Human-centred design of ergonomic workstations on interactive digital mock-ups. Lecture Notes in Mechanical Engineering, 1187-1195, 2017.
Google Scholar
15. Shin, Y.S., Hong, J.S., Kim, Y.M., Sim, W.J. and Kim, J.H., A Study on the Safety of a Tricycle Tandem for Two Persons for the Elderly and Persons with Disability using Standard Survey and Analytic Hierarchy Process, Journal of the Ergonomics Society of Korea, 41(2), 77-88, 2022.
Google Scholar
16. Troiano, A., Naddeo, F., Sosso, E., Camarota, G., Merletti, R. and Mesin, L., Assessment of force and fatigue in isometric contractions of the upper trapezius muscle by surface EMG signal and perceived exertion scale, Gait & Posture, 28, 179-186, 2008.
Google Scholar
17. Vyavahare, R.T. and Kallurkar, S.P., Ergonomic evaluation of electric hedge trimmer using digital human modeling. Agricultural Engineering International, 17(4), 100-108, 2015.
Google Scholar
18. Wang, L. and Lau, H.Y., Digital human modeling for physiological factors evaluation in work system design. Digital Human Modeling and Applications in Health, Safety, Ergonomics, and Risk Management. Human Body Modeling and Ergonomics: 4th International Conference, DHM 2013, 134-142, 2013.
Google Scholar
19. Ziolek, S.A. and Kruithof, P.C., Human modeling & simulation: a primer for practitioners. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 44, 2000.
Google Scholar
PIDS App ServiceClick here!