eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Eun Kyoung Woo
, Chang Gi Lee
, Jong Hyun Kim
10.5143/JESK.2024.43.2.153 Epub 2024 May 07
Abstract
Objective: The aim of this study is to conduct verification and validation (V&V) the main performance of service robots quantitatively and objectively based on a collaboration scenario between workers and service robots in disinfection work.
Background: In disinfection work, collaboration between workers and robots is necessary to ensure worker safety and work efficiency due to chemical spraying. However, service robots have different scenarios and main performances depending on their work purpose, and research on related verification and verification methods is insufficient. Therefore, it is necessary to derive the main performance of the robot based on the service robot's work scenario, and V&V study.
Method: In this study, the main performance evaluation factors and goals of disinfection service robots were derived through analysis of service robot-related standards. The five performance evaluation factors and goals are as follows. ① Marker recognition accuracy (95%), ② Driving through obstacles (threshold height 1cm), ③ Braking performance (less than 3cm, 2 seconds), ④ Emergency stop, ⑤ Robot status information. Based on the work scenario between the worker and the robot, we developed the V&V scenario that can evaluate the main performance of the disinfection service robot, and performed the V&V evaluation using this.
Results: In the evaluation results of this study conducted through the V&V scenario for the disinfection service robot, all five indexes achieved the goals. The marker recognition accuracy was found to be 98.75%, and the obstacle passing and emergency stop functions worked correctly in all five repetitions. Braking performance also showed a braking distance of 27.50mm(±14.27) and a braking time of 1.06 seconds (±0.44). Robot status information also showed a suitability of over 85%.
Conclusion: Service robots that perform a variety of tasks appropriate for industrial fields are being used, making it difficult to develop standardized specifications for performance and safety factors. Therefore, in this study, we developed a disinfection service robot work scenario for V&V and conducted the V&V study of the main performance of the robot using the scenario.
Application: The development of V&V protocol based on work scenarios for worker collaborative service robots is expected to ultimately facilitate the interaction between robots and workers, increase work efficiency, and enable the development of service robots with which workers can collaborate more safely.
Keywords
Disinfection service robot Worker-Robot collaborative Scenario of Verification and Validation (V&V) Worker-Robot interaction
코로나19로 인한 팬데믹과 메르스 등의 전염병, 빈대 등의 해충이 유행하면서 방역 산업은 크게 성장하였고, 우리가 생활하는 공간인 사무실, 가정, 음식점, 카페, 유치원, 학교, 학원 등에 대한 일상적이고 정기적인 방역 작업이 수행되고 있다(Kimmig et al., 2020). 방역 작업자가 약품을 분사하고 닦아내는 작업으로 이뤄지는 방역 작업의 약품과 소독제는 박테리아와 바이러스, 해충에 효과적이지만 공기 중에서 분사된 약품을 흡입하는 작업자에게는 독성을 가지고 있어 작업 안전성 문제가 부각되고 있다. 또한 사무실과 대상 공간에 대한 작업은 대부분 이용자가 없는 야간에 수행되어 작업자의 피로로 인한 문제까지 더해져 안전은 더욱 취약한 상태이다(Tavakoli et al., 2020). 이와 같은 문제를 해결하기 위하여 작업자와 로봇이 협업하는 방식으로 로봇은 분사 작업을 수행하고 작업자는 로봇의 제어와 분사 후 처리 작업을 협업할 수 있는 방역 서비스 로봇이 필요한 상황이다.
본 연구의 대상인 작업자 협업형 방역 서비스는 인간-로봇 협업(HRC: human – robot collaboration)의 개념에서 작업자와 로봇의 협업 효과를 최적화하기 위하여 안전성 이슈가 불거진 약품 분사 작업은 로봇이 수행하고, 약품을 닦고 로봇을 제어하는 작업은 작업자가 수행하는 것으로 구분되어 작업자와 로봇 협업으로 수행된다. 이와 같은 작업자와 로봇 협업에서는 직관적이고, 인식하기 쉽고, 안전한 인간-로봇 인터페이스(HRI: human robot interface)을 위한 작업자와 로봇 간의 주요 상호 작용의 설계와 서비스 시나리오에 기반한 성능 검증과 서비스 실증이 중요하다. 이를 통해 작업자 친화적이며 작업자 중심으로 주요 성능과 상호 작용 요소를 개선하고 최적화하는 것이 필요하다(Villani et al., 2018; Ajoudani et al., 2018).
약품 분사를 담당하는 방역 서비스 로봇에서는 원격 제어와 직접 제어가 가능하며 원격 작업에서 작업 공간 이동 상태 및 이상 상태 알람 등의 다양한 서비스 기능에 대한 정보 제공과 제어를 가능하게 하는 HRI 기술, 서비스 어플리케이션에 대한 검증 · 실증(V&V: verification and validation)이 필요하다(Valori et al., 2021). 또한 방역 작업의 효율성은 유지하면서 안전한 작업을 수행할 수 있는 작업자와 로봇 간 상호 작용 요소를 검증할 필요가 있다.
방역 서비스 로봇의 V&V는 대상이 되는 기능과 상호 작용 요소에 대한 표준 규격이 없고, 작업자와 로봇 간의 상호 작용과 세부 사항에 대한 관련 연구가 미흡한 문제점이 있다. 따라서 대상 로봇에 대한 주요 기능을 정의하고 작업 서비스 시나리오 기반의 V&V 프로토콜 개발이 필요하다(Eder et al., 2014). 작업자 협업형 방역 서비스 로봇은 기본적으로 협동 로봇 규격인 ISO 10218-1:2011 (2011), ISO 13482:2014 (2014) 및 ISO/TS 15066:2016 (2016)과 같은 표준에 속하지만 방역 작업에 관련된 주요 성능 요소들에 대한 내용은 부재하다. 따라서 본 연구에서는 작업자-로봇 협업형 방역 서비스 프로세스에 따라 주요 성능에 대한 V&V 시나리오를 개발하기 위하여 주요 작업에 대한 상호 작용 요소에서의 로봇의 성능과 안전 요소들을 도출하였다. 방역 서비스 블루프린트를 기반으로 도출된 V&V 평가 시나리오를 통해 방역 작업자 협업형 서비스 로봇의 성능 검증과 서비스 실증을 수행하였다(Webster et al., 2020).
본 연구의 목적은 방역 작업에서 작업자와 서비스 로봇 간 협업 시나리오를 기반으로 로봇의 주요 성능을 정량적이고 객관적인 방법으로 V&V를 수행하는 것이다.
본 연구에서는 작업자 협업형 방역 서비스 로봇의 성능 검증과 서비스 실증을 위하여 기존 서비스 로봇 및 방역 기기 등과 관련된 선행 유사 규격 분석을 수행하였고, 선행 규격에서 정의되지 않은 방역 서비스 로봇의 주요 성능 평가 요소를 도출하였다. 그리고 방역 작업자-로봇 협업 서비스 블루프린트를 통해 성능 검증과 서비스 실증 평가 시나리오를 개발하였다(Bitner et al., 2008; Solomon et al., 1985). 사용의 효율성을 검증을 위한 평가 지표로 활용되는 Performance Metrics 기법을 통해 방역 서비스 로봇의 V&V에 대한 과업 성공과 오류 횟수, 조작 수행 시간 등의 주요 변수를 분석하였다(Hung et al., 2003; Tullis and Albert, 2013).
2.1 The definitions of main performance and evaluation factors through standard analysis related to disinfection service robots
방역 서비스 로봇의 성능 V&V 평가 시나리오를 개발하기 위하여 관련 기존 규격 분석을 통해 주요 성능을 정의하였고, 성능에 대한 평가 요소들을 도출하였다. 기존 규격 조사는 'e 나라표준인증'에서 '서비스 로봇', '로봇', '이동', '분무', '분사', '방역', '접근성', '안전'의 키워드를 중심으로 수행되었다(Korean Standards and Certification, 2023).
국내 규격 조사를 통해 방역 서비스 로봇, 약품 분사 기능에 대한 관련 규격 8가지를 선정하였다. ① KS B 6969:2009(서비스 로봇의 이동 기능 특성 측정 방법_제3부 위치 정밀도 시험); ② KS B ISO18646-1(로봇-서비스 로봇의 성능 기준 및 관련 시험 방법_제1부: 바퀴형 로봇의 이동 능력); ③ KS A ISO 1503(동작의 공간적 방위와 방향-인간공학적 요구사항); ④ KS C IEC 61214(수지형 전기분무기의 성능 측정 방법); ⑤ KS B ISO10218-1(로봇 및 로봇 장치_산업용 로봇의 안전에 관한 요구사항_제1부: 로봇); ⑥ KS S ISO 3864-1 (그래픽 심볼-안전색 및 안전 표지_제1부: 안전 표지 및 안전 표시의 디자인 원칙); ⑦ KS X 5001-1(정보 기술-소프트웨어 접근성 설계 지침_제1부: 프레임워크 및 일반 지침); ⑧ KS B 7312(실내 이동 로봇의 장애물 회피 시험 방법), 이렇게 8가지 관련 규격에서 방역 서비스 로봇의 주요 성능을 정의하였고, 이를 토대로 성능 및 실증 평가 요소를 도출하였다(Table 1).
|
Standards |
Performance |
Standard analysis |
Performance factors of |
|
① KS B 6969:2009 / Test methods of |
Positioning repeatability |
Difficulty in evaluating position |
① Route goal achievement based |
|
② KS B ISO18646-1 / Robotics – Performance criteria and related |
Braking distance |
Can be actively used as an |
② Evaluation of robot braking
distance and braking time performance by obstacle |
|
Threshold passing |
③ Threshold passing performance
evaluation |
||
|
③ KS A ISO 1503 / Spatial orientation |
Design of spatial |
Can be actively used for robot |
④ Accuracy and suitability of |
|
④ KS C IEC 61214 / Hand-held mains |
Maximum spraying |
Does not match robot disinfectant |
⑤ Maximum spray reach performance evaluation |
|
⑤
KS B ISO10218-1 / Robot and |
Robot stop function |
Can be applied as a robot safety element,
can be used as a safety element through visual |
⑥ Worker manual operation |
|
⑦ Stop state cognitive information |
|||
|
⑥ KS S ISO 3864-1 / Graphical |
Safety marking layout |
Regarding general safety sign principles,
does not include |
⑧ Recognizability of safety signs
when communicating safety information |
|
⑦ KS X 5001-1 / Information
Technology – Guidelines for
Software Accessibility Part 1: Framework and General |
Accessibility application |
Can be used for user interaction design
aspects for service |
⑨ Accessibility Application
Interface Worker Information Recognition |
|
⑧ KS B 7312 / Test methods for
obstacles avoidance of indoor mobile robots |
Static, dynamic obstacle |
Difficulty in evaluating obstacle
avoidance rate in actual use environments such as narrow |
⑩ Detection and avoidance rate of
static and dynamic obstacles |
8가지 기존 규격들의 성능 평가 항목들에서 '위치 반복 정밀도(Positioning repeatability)', '제동 성능(Braking distance)', '문턱 통과 이동 성능(Threshold passing performance)', '동작의 공간적 방위와 방향 설계(Design of spatial orientation and direction of movement)', '최대 분사 능력(Maximum spraying capacity)', '로봇 정지 기능(Robot stop function)', '안전 표시 요소의 사용자 인지성(Safety marking layout)', '접근성 응용 프로그램 인터페이스 구현(Accessibility application programming interface)', '정적, 동적 장애물 회피율(Static, dynamic obstacle avoidance)'이 방역 서비스 로봇의 주요 성능 항목(Performance evaluation factors)으로 도출되었다. 그리고 규격에 명시된 성능 평가 방식은 넓은 범위에서 정의된 로봇의 표준화된 평가 방식으로 정의되어 있어, 본 연구에서 도출된 성능 평가 항목(Performance evaluation factors)들을 방역 서비스 로봇에 적합한 성능 평가 요소(Performance factors of disinfection service robots)로 다음과 같이 구체화하였다. ① '마커 인식 주행, 회전에 대한 실제 작업 시나리오 기반의 경로 목표 달성도', ② '장애물 감지로 인한 로봇 정지 거리 및 정지 시간 성능 평가', ③ '문턱(지면 장애물) 통과 주행 성능 평가', ④ '로봇 조작 인터페이스 정확, 적합성', ⑤ '작업장 규모에 따른 최대 분사 도달 거리 성능 평가', ⑥ '작업자 수동 조작 로봇 정지 기능 성능 평가', ⑦ '정지 상태 인지 정보 전달 적합성', ⑧ '안전 요소 정보 전달 시 안전 표시 인지성', ⑨ '접근성 응용 프로그램 인터페이스 작업자 정보 인지성', ⑩ '구간 내 정적, 동적 장애물의 감지 및 회피율'(Table 1).
2.2 The method of V&V scenario development for disinfection service robots
서비스 로봇은 활용 분야와 사용 목적, 서비스 시나리오에 따라 구체적인 사양과 성능이 구별되지만, 표준에는 개별 로봇의 구체적인 성능과 사양에 대한 V&V 방법이 명시되어 있지 않다. 따라서 본 연구에서는 작업자 협업형 방역 서비스 로봇에 대한 V&V 시나리오 개발 연구를 수행하였다. 실 사용 환경에서 서비스 로봇의 주요 성능 검증을 위하여, 방역 작업 서비스 블루프린트 분석하였고, 작업자와 로봇 간 상호 작용을 중심으로 V&V 평가 시나리오를 개발하였다.
작업자 중심으로 고객 여정 분석과 서비스 블루프린트 분석 기법을 활용하여 작업자와 로봇 간의 상호 작용과 방역 서비스 로봇의 주요 성능을 정의하였다(Bitner et al., 2008; Solomon et al., 1985).
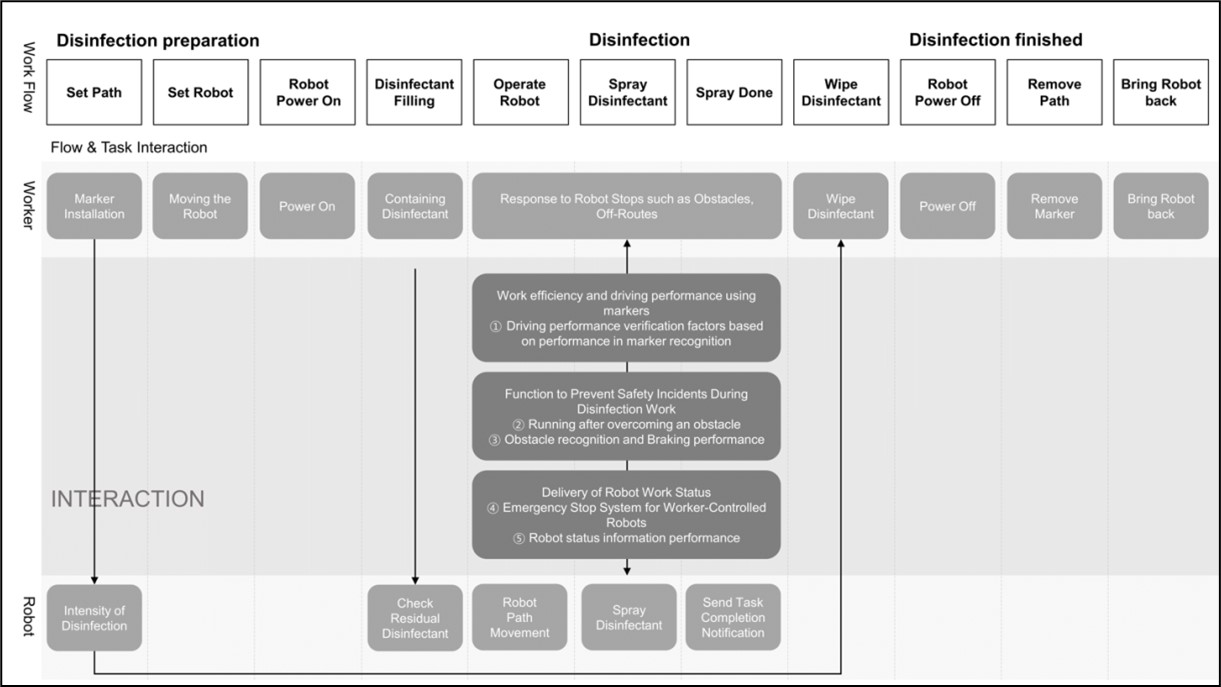
서비스 블루프린트는 이해관계자 분석과 전문가 인터뷰를 통해 서비스의 주요 이슈를 도출하고 서비스 블루플린트를 검증하였다. 전문가 인터뷰에 참여한 이해관계자들은 다음과 같이 구성되었다. 방역 작업 전문가 2인, 인간공학 분야 전문가 2인, 서비스 디자이너 1인, 로봇 개발자 2인으로 구성된 총 7명의 전문가가 참여하였다. 방역 작업 전문가를 대상으로는 작업 서비스 시나리오 도출과 여정 분석(Work flow, Worker Journey)을 수행하였다. 이를 통해 작업 준비(Disinfection preparation)에서 방역 작업(Disinfection), 작업 종료(Disinfection finished)의 순으로 방역 작업을 크게 주요 11개 작업(Work flow)으로 정의하였다. 인간공학 분야 전문가는 로봇-작업자 간 상호 작용에 대한 세부 내용을 검토하여, 주요 상호 작용 3가지를 정의하였다. 로봇 개발자들은 주요 상호 작용에서 로봇 성능 평가 항목 5가지를 정의하였다. 서비스 디자이너는 서비스 분석을 통해 블루프린트의 정보 흐름을 구체화하였다. 이와 같은 전문가 인터뷰와 이해관계 분석을 통해 작업 흐름 및 상호 작용(Flow & Task Interaction) 요소는 크게 세 가지로 첫 번째는 마커에 따른 작업 효율 및 주행 성능, 두 번째는 작업 중 안전사고 예방 기능, 세 번째로 로봇 작업 상태 전달에 대한 상호 작용으로 도출되었다(Figure 1).
로봇-작업자 간 상호 작용 분석과 로봇 개발자들에 정의된 5가지 주요 성능 평가 항목과 방법을 중심으로 로봇의 V&V 평가 시나리오를 개발하였고, 로봇의 주요 성능 평가 항목과 성능 목표 5가지를 다음과 같이 도출하였다. ① 마커 인식 주행 성능(마커 인식 정확도 95%), ② 문턱 통과 주행 성능(1cm 높이 문턱 통과), ③ 장애물 감지 제동 성능(제동 거리 3cm 이하, 제동 시간 2초 이내), ④ 로봇 비상 정지 성능(성공 여부), ⑤ 로봇 상태 정보화 성능(출력 적합성 85%), 이렇게 도출된 방역 서비스 로봇의 5가지 주요 성능 평가 항목에 대한 일련의 로봇 작업 시나리오를 통해 V&V 평가 시나리오를 개발하였다.
2.3 Measurement of disinfection service robot V&V data
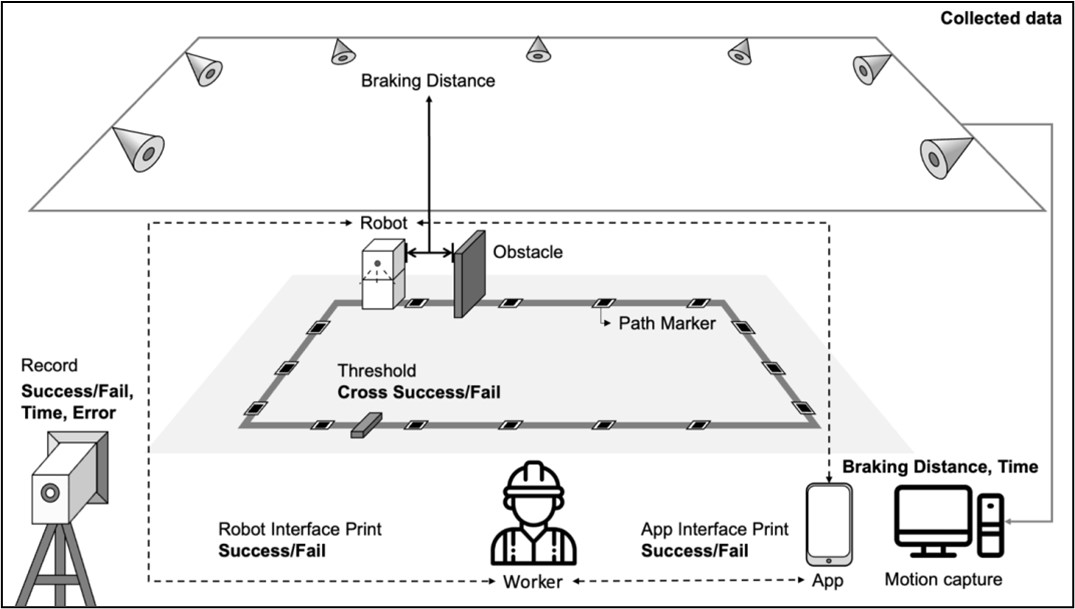
방역 서비스 로봇의 서비스 블루프린트 분석을 통해 도출된 5가지 성능 요소(Evaluation factors)에 대한 시나리오 평가를 5회 반복하여 수행하였다. 방역 서비스 로봇의 V&V 데이터는 모션 캡쳐 시스템(Vicon Inc. U.K.), 스마트폰 영상 촬영, 로봇 제어 어플리케이션 화면 녹화를 활용하여 측정하였다(Figure 2).
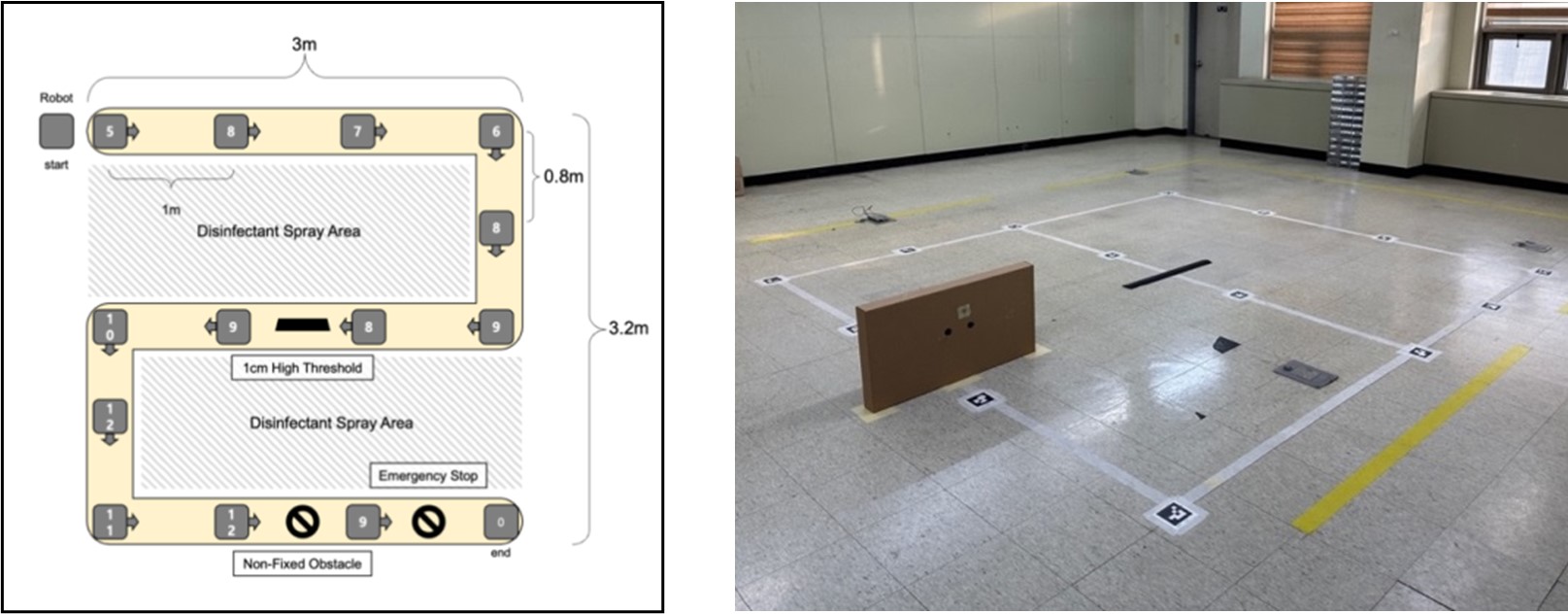
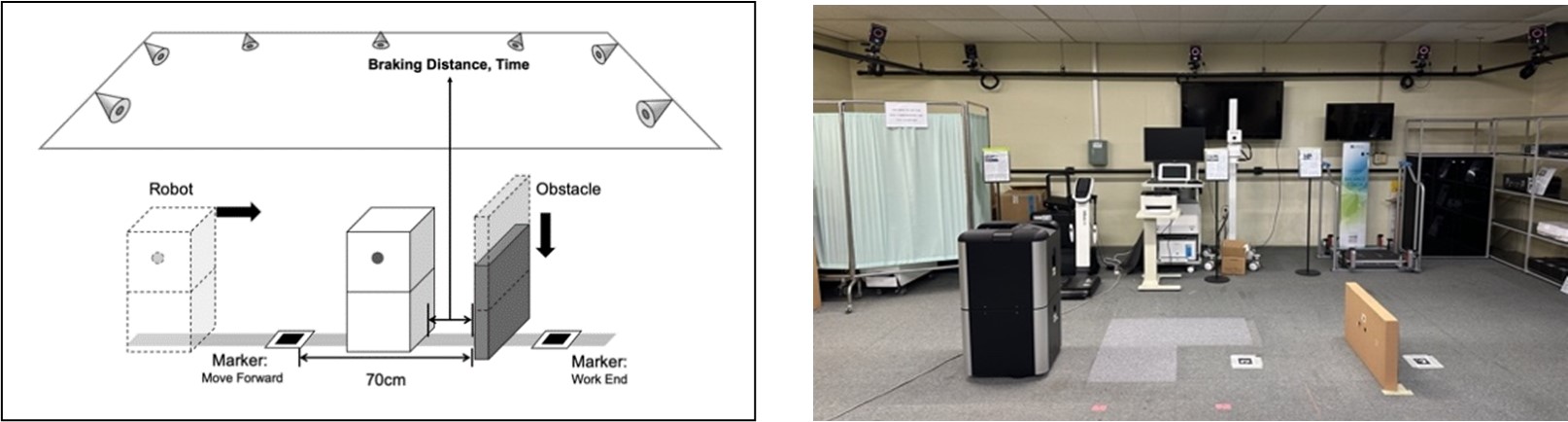
마커 인식 정확도는 3m * 3.2m의 'ㄹ' 형태(Figure 3)로 마커 14개(Path marker)를 1m, 0.8m 간격으로 배치하여 로봇을 주행하였고, 마커를 인식하지 못하고, 경로를 이탈할 경우 실패로 판정하였다. 장애물 통과 주행은 높이 1cm의 문턱 장애물(Threshold)을 '8번' – '9번' 마커 사이에 배치하여 통과 여부를 확인하였다. 장애물(Obstacle) 인식 후 제동 성능은 마커로부터 70cm 떨어진 위치에 비고정식으로 장애물을 배치 후 제동 거리와 시간에 대한 데이터를 수집하였다. 장애물 인식 후 제동에 대한 데이터를 수집하기 위하여, 가속도가 줄어드는 시점부터 정지까지의 시간과 거리를 모션 캡쳐 시스템 장비로 측정하였다(Figure 4). 로봇 비상 정지 성능은 로봇의 주행 중 로봇 제어 Application을 활용하여 비상 정지시켰고, 정지 성공 여부를 확인하였다. 로봇 상태 정보화 성능은 로봇 제어 어플리케이션에 작업 상태 정보화(로봇 작업 상태 정보, 장애물 감지 정보, 비상정지 정보, 작업 종료 정보)의 성공 여부를 어플리케이션 화면을 통해 확인하여 평가하였다(Table 2).
|
Evaluation
factors |
Measurement |
Equipment |
Analysis |
|||
|
① Marker recognition driving performance |
-
Collecting the percentage of recognized - Error count when marker recognition
fails |
Record video Mobile Camera |
Recognize success/ |
Error count |
||
|
② Threshold passing |
If the 1cm height threshold is passed 2
times |
Record video Mobile Camera |
2 attempts, 2 passes: Success if not 'Failure' |
|||
|
③ Obstacle detection |
-
The robot identifies obstacles, records braking -
Collecting robot braking data (mm/s) during |
Motion capture |
Attempt to 'Success', 'Failure' |
Braking |
Braking |
|
|
④ Robot emergency |
Quantifying emergency stop success (%) and
failures (error count) during manual control |
Record video Mobile Camera |
Attempt to stop success/attempt (%) |
Error count |
||
|
⑤ Robot status |
The app displays overall task status for
the |
Application interface screen |
Output success/ |
Error count |
||
3.1 Result of disinfection service robot V&V scenario development
작업 시나리오에서 로봇과 작업자 간 상호 작용을 중심으로 도출된 5가지 성능 항목에 대한 V&V 시나리오 개발 결과는 다음과 같다.
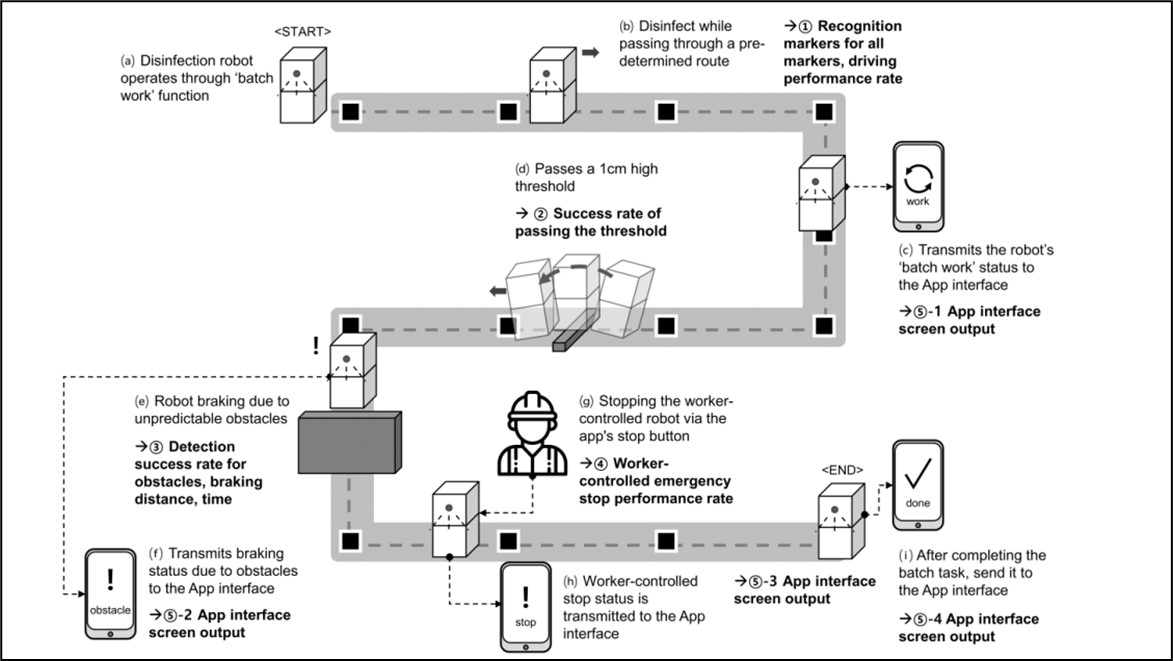
(a) 방역 로봇 '일괄 작업' 기능을 통하여 로봇을 작동하여 작업을 시작한다. (b) 로봇은 미리 설정한 경로를 지나며 방역 작업을 수행하고 ① 마커 인식 정확도 성능을 검증한다. (c) 로봇의 '일괄 작업' 상태 정보를 로봇 제어 어플리케이션으로 전달하여 ⑤-1 출력 성공에 대한 작업자 정보 전달 성능을 검증한다. (d) 이동 경로 중 놓인 1cm 높이의 문턱을 로봇이 통과하는 것을 기준으로 ② 문턱 통과 여부를 확인한다. (e) 방역 과정 중 장애물로 인한 로봇의 급제동에 대하여 ③ 로봇의 급제동 성공률과 제동 거리, 시간을 측정한다. (f) 장애물로 인해 정지된 로봇은 제동 상태 정보를 로봇 제어 어플리케이션으로 전달하여 ⑤-2 출력 성공에 대한 작업자 정보 전달 성능을 검증한다. (g) 작업자는 로봇을 비상 정지 명령을 입력하고, ④ 로봇의 비상 정지 여부에 대한 성능을 검증한다. (h) 비상 정지된 로봇은 정지 상태 정보를 로봇 제어 어플리케이션으로 전달하여 ⑤-3 출력 성공에 대한 작업자 정보 전달 성능을 검증한다. (i) 일괄 작업을 완료하여 정지한 로봇은 상태 정보를 로봇 제어 어플리케이션으로 전달하여 ⑤-4 출력 성공에 대한 작업자 정보 전달 성능을 검증한다(Figure 5).
3.2 Results of disinfection service robot main performance V&V
V&V 시나리오를 5회 반복하여 수행한 5가지 성능 항목에 대한 평가 결과는 (Table 3)와 같다. 마커 인식 주행 성능 결과(Marker recognition driving performance)는 1회차 93.75%, 2회차 100%, 3회차 100%, 4회차 100%, 5회차 100%로 평균 98.75%로 나타났다. 문턱 통과 주행 성능(Threshold passing performance)은 5회 모두 성공하여, 성공률 100%로 나타났다. 장애물 감지 제동 성능 결과(Obstacle detection braking performance)는 5회 모두 제동에 성공하였고(성공률 100%), 평균 제동 거리는 27.50mm(±14.27), 평균 제동 시간은 1.06초(±0.44)로 나타났다. 로봇 비상 정지 성능 결과(Robot emergency stop performance)는 5회 모두 성공하여, 성공률 100%로 나타났다. 로봇 상태 정보화 성능 결과(Robot status information performance)는 평균 85%로 나타났다(Table 3).
|
Evaluation |
① Marker
recognition |
②
Threshold |
③
Obstacle detection braking |
④
Robot emergency |
⑤
Robot status |
|||||
|
Performance |
Recognize |
Error |
2 attempts, 2 passes: 'Success, 1' 'Failure, 0' |
Attempt to 'Success, 1' 'Failure, 0' |
Break distance (mm) |
Break |
Attempt to success/ |
Error |
Output |
Error |
|
1st |
15/16 (94%) |
1 |
1 |
1 |
36.72 |
1.43 |
1/1
(100%) |
0 |
1/4 (25%) |
3 |
|
2nd |
14/14 (100%) |
0 |
1 |
1 |
36.37 |
0.92 |
2/2
(100%) |
0 |
4/4 (100%) |
0 |
|
3rd |
14/14 (100%) |
0 |
1 |
1 |
22.74 |
0.40 |
2/2
(100%) |
0 |
4/4 (100%) |
0 |
|
4th |
14/14 (100%) |
0 |
1 |
1 |
4.42 |
1.46 |
1/1
(100%) |
0 |
4/4 (100%) |
0 |
|
5th |
14/14 (100%) |
0 |
1 |
1 |
37.27 |
1.10 |
2/2
(100%) |
0 |
4/4 (100%) |
0 |
|
AVERAGE |
98.75% |
100% |
100% |
27.50 (±14.27) |
1.06 (±0.44) |
100% |
85% |
|||
|
Achieving |
√ |
√ |
√ |
√ |
√ |
|||||
본 연구는 작업자 협업형 방역 서비스 로봇에 대한 서비스 이해와 작업자와 로봇 간 상호 작용 요소를 토대로 주요 성능에 대한 V&V 평가 시나리오를 개발하였고, 이를 활용한 V&V 평가를 통해 대상 로봇의 성능을 검증, 확인하였다.
마커 인식 주행 성능은 목표인 1회차 결과에서 94% 정확도를 나타냈으나, 성능 개선을 통해 2회차부터 오류 없이 100% 인식 정확도 나타냈고, 성능 목표 95% 이상을 달성하였다. 문턱 통과 주행 성능은 모든 회차에서 성공하여, 목표한 성능인 1cm 문턱 통과에 대한 목표를 달성하였다. 장애물 감지 제동 성능에서는 제동 거리가 27.50mm(±14.27)로 목표한 3cm 이하를 달성하였고, 제동 시간은 1.06초(±0.44)로 목표한 2초 이내를 달성하였다. 로봇 비상 정지 기능과 로봇의 상태 정보 전달에 대한 성능 역시 목표한 성능을 달성하였다. 로봇 상태 정보화 성능은 1회차 평가 후 성능 개선을 통한 출력 적합성 85% 이상을 달성하였다.
본 연구는 다양한 형태가 목적으로 기능과 성능 역시 다양한 서비스 로봇 분야에 서비스 형태와 작업 방식에 적합한 V&V 시나리오 기반 성능 검증 방법을 제안하였다. V&V 시나리오는 작업자와 로봇의 상호 작용과 서비스 시나리오를 기반으로 하였고, 주요 성능에 대한 정량적 측정과 분석 방법을 제시하였다. 이와 같은 방안은 규격 위주의 서비스 로봇에 대한 성능 검증 방안의 문제점을 해결하고, 서비스와 작업 방식 특성에 맞는 성능 검증을 가능하게 한 장점이 있다. 더불어 도출된 주요 성능 항목에 대한 객관적 평가 결과는 서비스 로봇의 성능 개선 요소를 도출할 수 있었고, 서비스 로봇의 성능 개선으로 작업 효율성, 사용성, 안전성 등이 향상을 확인할 수 있었다.
서비스 로봇의 활용 분야가 다양해짐에 따라 활용 목적과 서비스 기능 역시 다양해지고 있다. 하지만 다양한 목적과 기능의 서비스 로봇에 표준화된 평가 규격을 적용하기에는 많은 문제가 있다. 따라서 서비스 로봇의 사용 목적과 기능에 부합하는 평가 시나리오와 평가 방법을 개발하고, 주요 성능을 검증하기 위하여 본 연구를 수행하였다.
본 연구는 실 사용 환경에서 작업자와 서비스 로봇 간 상호 작용을 중심으로 로봇의 성능을 평가하기 위하여 서비스 디자인 방법론을 활용한 V&V 평가 시나리오 개발하였고, V&V 평가 시나리오를 활용하여 방역 서비스 로봇의 주요 성능 검증을 수행하였다.
기존의 서비스 로봇에 대한 규격 조사 분석을 통해 방역 서비스 로봇 주요 성능 평가 항목을 도출하였고, 방역 작업 시나리오의 로봇-작업자 간의 상호 작용을 중심으로 성능 검증 요소를 도출하였다. 성능 검증 평가 항목에 대한 정량적 결과 수집을 위한 평가 프로토콜 개발과 더불어 실제 작업 환경을 고려한 V&V 시나리오를 토대로 평가를 수행하였다. V&V 평가 결과는 목표 달성 여부를 확인하였고, 로봇의 성능 개선과 목표 달성에 대한 재 검증과 5회 반복 평가를 통해 방역 서비스 로봇의 성능 목표치 달성을 검증하였다.
본 연구의 성능 검증 대상 로봇인 방역 서비스 로봇은 실제 서비스로 제공되기 이전에 제작한 시제품으로 현재 상용화를 목적으로 개발 과정 중에 있다. 실제 서비스 출시 전에 개발 과정에서 진행되는 로봇 성능 검증 평가(Formative evaluation)는 실 사용 환경을 고려하지 않는 경우가 많아, 실제 서비스 직전에 수행되는 평가(Summative evaluation)에서 많은 문제를 야기하는 단점이 있다(Russell and Blake, 1988). 이와 같은 형성 평가 문제점을 보완하고, 실 사용 환경에 적합한 서비스 로봇 개발을 위해서는 로봇-작업자 간의 서비스 상호 작용 분석을 통한 성능 검증 요소의 도출과 평가 방법이 필요하기 때문에, 본 연구에서는 실제 작업 시나리오를 기반으로 한 V&V 평가 시나리오를 개발하는 과정을 수행하였다.
서비스 로봇의 작업과 서비스 시나리오를 기반으로 개발한 V&V 평가 시나리오와 성능 평가 항목에 대한 평가 방법은 다양한 서비스 로봇들의 다양한 성능과 기능에 대하여 맞춤형으로 검증하고 실 사용 환경을 반영한 V&V를 가능하게 함으로써 서비스 로봇 품질 향상에 기여할 것으로 기대된다.
References
1. Ajoudani, A., Zanchettin, A.M., Ivaldi, S., Albu-Schäffer, A., Kosuge, K. and Khatib, O., "Progress and Prospects of the Human–Robot Collaboration". Autonomous Robots, 42, 957-975, 2018.
Google Scholar
2. Bitner, M.J., Ostrom, A.L. and Morgan, F.N., Service Blueprinting: A Practical Technique for Service Innovation, California Management Review, 50(3), 66-94, 2008.
Google Scholar
3. Eder, K., Harper, C. and Leonards, U., Towards the safety of human-in-the-loop robotics: Challenges and opportunities for safety assurance of robotic co-workers'. In Proceedings - IEEE International Workshop on Robot and Human Interactive Communication: 2014 IEEE RO-MAN, 2014-October, 660-665, 2014.
Google Scholar
4. Hung, Y.H., Huang, M.L. and Chen, K.S., "Service Quality Evaluation by Service Quality Performance Matrix". Total Quality Management & Business Excellence, 14(1), 79-89, 2003.
Google Scholar
5. Kimmig, R., Verheijenm, R.H.M. and Rudnicki, M., Robot assisted surgery during the COVID-19 pandemic, especially for gynecological cancer: a statement of the Society of European Robotic Gynaecological Surgery (SERGS). Journal of Gynecologic Oncology, 31(3), e59, 2020. doi:10.3802/jgo.2020.31.e59.
Google Scholar
6. Korean Standards and Certification, https://www.standard.go.kr/KSCI/portalindex.do (retrieved February 13, 2024).
7. Solomon, M.R., Surprenant, C., Czepiel, J.A. and Gutman, E.G., A Role Theory Perspective on Dyadic Interactions: The Service Encounter. Journal of Marketing, 49(1), 99-111, 1985.
Google Scholar
8. Tavakoli, M., Carriere, J. and Torabi, A., "Robotics, Smart Wearable Technologies, and Autonomous Intelligent Systems for Healthcare During the COVID-19 Pandemic: An Analysis of the State of the Art and Future Vision". Advanced Intelligent Systems, 2020.
Google Scholar
9. Tullis, T. and Albert, B., Measuring the User Experience: Collecting Analyzing and Presenting Usability Metrics. Elsevier; 2013.
Google Scholar
10. Valori, M., Scibilia, A., Fassi, I., Saenz, J., Behrens, R., Herbster, S., Bidard, C., Lucet, E., Magisson, A., Schaake, L., Bessler, J., Prange-Lasonder, G., Kühnrich, M., Lassen, A. and Nielsen, K., Validating Safety in Human–Robot Collaboration: Standards and New Perspectives. Robotics, 10(2), 65, 2021.
Google Scholar
11. Villani, V., Pini, F., Leali, F. and Secchi, C., "Survey on Human–Robot Collaboration in Industrial Settings: Safety, Intuitive Interfaces and Applications". Mechatronics, 55, 248-266, 2018.
Google Scholar
12. Webster, M., Western, D., Araiza-Illan, D., Dixon, C., Eder, K., Fisher, M. and Pipe, A., A corroborative approach to verification and validation of human–robot teams, The International Journal of Robotics Research, 39(1), 73-99, 2020.
Google Scholar
13. Russell, J.D. and Blake, B.L., Formative and Summative Evaluation of Instructional Products and Learners. Educational Technology, 28(9), 22-28, 1988.
Google Scholar
PIDS App ServiceClick here!