eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Yuhwa Hong
, Suhwan Jung
, Gyuhee Park
, Yong Gu Ji
, Min Chul Cha
10.5143/JESK.2024.43.4.257 Epub 2024 September 08
Abstract
Objective: The aim of this study is to present eHMI design factors for effective communication between autonomous vehicles and various road users.
Background: With the advent of smart cities and the acceleration of research on self-driving vehicles, eHMI also needs application standards for commercialization, and current studies have mixed results on effectiveness to consider in actual eHMI design, and there are no clear design standards as eHMI are newly emerging vehicle devices.
Method: A systematic review method was applied to present integrated eHMI design standards, and 48 literatures related to eHMI research considering ergonomic aspects were selected and analyzed.
Results: It presents eight design factors (Placement, Distance, Vehicle Scale, Message, Color, Modality, System Mode, Information Mode) that eHMI should consider and includes explicit guidance in each criterion.
Conclusion: By presenting integrated ergonomic results beyond the technical point of view of a vehicle-to-person communication tool called eHMI, it is possible to present standards for eHMI design that consider the effectiveness of existing mechanical characteristics as well as the impact on road users.
Application: This study established design factors based on the characteristics of eHMI and can be used as basic data for eHMI applicable to actual development.
Keywords
External Human-Machine Interfaces (eHMI) Self-driving vehicles Design factors Road user Systematic review
현재 도로에서 차량의 의사소통 방식은 대부분 운전자가 외부 도로 이용자와의 눈맞춤 및 손짓 등을 통해 이루어진다. 하지만 자율주행차량의 기술 발전으로 인해, 차량 내 모든 좌석이 탑승객의 공간으로 고려되는 상황에서 주행 중 운전자의 역할이 사라질 수 있다. 이로 인해 차량이 보행자 및 다른 도로 이용자와 상호작용하는 전통적인 방식이 변화되고, 새로운 의사소통 수단이 필요하다는 의견이 제기되었다(Rettenmaier et al., 2020; Papakostopoulos et al., 2021; Oehl et al., 2022). 이를 해결하기 위해, 자율주행차량과 도로 이용자 간의 소통을 지원하는 eHMI (external Human-Machine Interface) 기술에 대한 연구가 활발하게 수행되고 있다. 하지만 도로 이용자에게 명확한 eHMI에 대한 합의가 없는 것으로 보인다(Bazilinskyy et al., 2019).
기존의 인간-기계 인터페이스(HMI) 연구는 대부분 운전자의 관점에서 차량 내부 인터페이스에 중점을 두어 왔으며, 이로 인해 내부 인터페이스 설계에 관한 원칙과 가이드라인은 비교적 명확하게 정립되어 있음을 확인할 수 있다(Naujoks et al., 2019; Jung et al., 2021). 그러나, eHMI는 차량 외부에 붙어 있는 인터페이스 장치로써, 운전자 관점이 아닌 차량을 바라보는 보행자 관점에서의 시야가 필요하기 때문에(Dey et al., 2022), 차량 내부의 HMI 가이드라인이 그대로 적용될 수 없다는 한계점이 있다. 예를 들어, 내부 HMI 가이드라인은 주로 운전자의 사용성, 안전성, 편의성을 고려하고 있지만(Naujoks et al., 2019), eHMI의 주요 사용자는 차량이 아닌 도로에 있는 보행자와 다른 주행 차량이기 때문에 인터페이스 설계에서 차량을 바라보는 관점과 요구사항을 우선 고려할 필요가 있다(Jan et al., 2023; Horn et al., 2023). 또한, eHMI external Human-Machine Interface)가 작동하는 도로 환경과 상황이 내부 HMI와는 다르다. 주간과 밤, 도심 지역과 시골 지역, 다양한 교통 상황에서 차량의 외부 장치로써 동작하기 때문에 내부 HMI 가이드라인의 일반적인 원칙을 적용하기 어렵다(Ferenchak et al., 2023; Jan et al., 2023; Lim and Kwon, 2023). 따라서 eHMI에서는 각 상황과 환경에 따라 다른 디자인 접근 방식이 필요하다.
eHMI를 통한 자율주행차량과 다양한 도로 이용자 간의 효과적인 상호작용을 위해서, 대부분의 연구는 기술적 측면과 인간공학적 측면에서 진행되어진다(Figure 1). 기술적인 연구가 선행된 후 그 사용성을 검증하기 위해 사용자 관점에서의 인간공학적 연구를 수행하기도 하고, 인간공학적 관점에서 제기되는 문제와 필요성을 해결하기 위해 적합한 기술 개발이 이루어지기도 한다. 기술적인 측면에서 eHMI 연구는 운전자가 존재하지 않는 상황에서 도로 이용자와 상호작용하기 위해 다양한 기술과 통신 시스템을 활용한 외부 인터페이스 시스템 기술이 제안되었다. 예를 들어, Light-band, Display, Projection과 같은 기술들을 활용한 eHMI 방식들이 개발되었다. 인간공학적 측면의 연구들은 eHMI를 제시하였을 때 보행자, 일반차량 운전자와 같은 다양한 도로 이용자의 행동 및 태도에 영향을 미치는 효과(인식 명확성, 인지된 안전, 보행 의사 결정, 만족도 등)에 초점을 두고 있다(Jan et al., 2023; Horn et al., 2023). 그러나 eHMI의 효과를 확인하기 위해 사용한 설계 변수가 연구마다 제각기 달랐으며, 같은 목적을 가진 연구임에도 상이한 결과를 보였다(Faas et al., 2020b). 이러한 혼재된 결과는 안전이 우선시되는 교통 상황에 명확하게 적용하기 어려우며 혼란을 야기할 수 있기 때문에 eHMI 개발 및 상용화에 역효과를 불러오는 요인으로 작용할 수 있다. 따라서 본 연구는 다수의 관련 문헌을 기반으로 도로 이용자 관점에서 안전한 교통 의사소통을 위한 eHMI 설계 요인을 제안하고자 한다.
따라서, 본 연구는 도로 이용자 관점에서 eHMI를 탐색한 선행연구들을 수집하여 체계적인 문헌 분석을 수행하고, 추후 자율주행차량을 도입하는데 있어 효과적인 eHMI 설계 요인 탐색을 목표로 한다. 연구 목적 달성을 위해 다음의 세부 연구 질문을 설정하였다.
RQ 1: 도로 이용자 관점에서 효과적인 eHMI 설계를 위해 고려해야 할 요인들은 어떤 것인가?
RQ 2: eHMI 설계 요인을 어떻게 반영해야 도로 이용자에게 효과적인가?
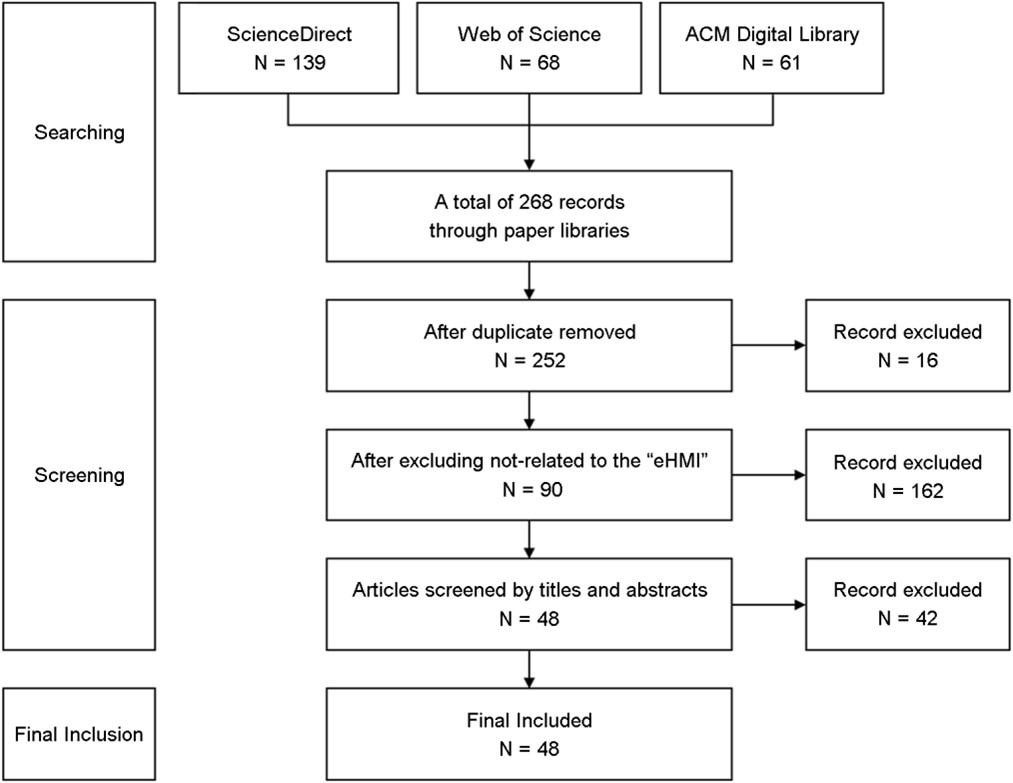
본 연구에서는 Preferred Reporting items for Systematic reviews and Meta-Analysis (PRISMA) 방법론에 기반하여 체계적 문헌 연구를 실시하였다(Moher et al., 2009). PRISMA 방법론은 문헌 연구를 기반으로 연구 목적을 달성하기 위해 다수의 연구에서 활용되었다. Figure 2는 본 연구에서 수행한 문헌 탐색과 포함 과정에 대한 전체적인 개요를 제시하고 있다. 검색 과정은 "external Human-machine interfaces" OR "external Human-machine interface" OR "eHMIs" OR "eHMI" 키워드 연산자를 통해 주요 국제 논문 라이브러리인 ScienceDirect, Web of Science, ACM Digital Library에서 검색하였으며, 논문 검색은 2023년 12월에 실시하였다. 검색을 통해 268개의 논문이 수집되었으며(ScienceDirect 139편, Web of Science 38편, ACM Digital Library 61편), 수집하는 과정에서 학회 발표 및 리뷰 논문을 제외한 research articles만을 포함하였다. 이 중에서 16편의 중복된 논문들을 제외하고, 핵심 키워드인 'eHMI'와 관련이 없는(자율주행차량 신뢰, 타 분야 학문 등) 문헌을 제외하여 총 90개의 논문이 선정되었다. 선정된 eHMI 관련 논문들에 대하여 초록을 검토한 뒤, 그 중 차량 간의 양보를 위한 신호 관점에서 eHMI를 평가하였거나, 통신에 대한 알고리즘, 상호작용 프로토콜에 집중한 논문 42편을 제외하여 최종적으로 총 48건의 논문에 대한 검토를 진행하였다.
본 연구는 실질적으로 도로 이용자 중심의 eHMI 설계에 적용할 수 있는 지침 사항을 탐색하기 위하여 인간공학 기반의 문헌을 중심으로 수집하였다. 인간공학적 관점으로 eHMI를 분석하기 위해 eHMI가 도로 이용자들의 안전 의식과 만족도(Oehl et al., 2022; Block et al., 2023; Ackermans et al., 2020) 및 도로 횡단 행동(Kaleefathullah et al., 2022; Rettenmaier et al., 2019) 등에 미치는 효과를 중심으로 작성된 문헌을 위주로 문헌을 분석하였다.
3.1 (RQ1) Extraction of the design factors
기술적으로 eHMI가 완성되지 않은 현 시점에서 eHMI를 연구하는 것은 제한적일 수밖에 없다. 하지만 기존에 다수 진행되어 온 HMI 연구들을 토대로 eHMI에 대한 핵심 요인을 도출할 수 있다. 이를 기반으로 eHMI 설계 요인 도출에 대한 기준을 참고하였다. Dey et al. (2020a)은 HMI를 통해 외부의 대상과 상호작용하는 목적인 가진 제품 및 서비스를 조사하여 코드화 하였고, 코드별 분류화 작업을 수행하였다. 해당 분류 차원을 기준으로 본 연구를 위해 수집한 도로 이용자 관점에서의 eHMI 연구를 매칭하였고, 이를 통해 주요 설계 요인을 도출하였다. 분류 차원과의 매칭은 최종적으로 선정한 문헌 중 도로 이용자의 상호작용 및 행동에 영향을 미친 설계 변수를 기준으로 분류 차원에 관련 있는 문헌을 연결하였다. 하나의 문헌에 2개 이상의 설계 요인을 포함하고 있는 문헌은 설계 요인 분류 과정에서 중복으로 적용하였다. 관련 문헌이 없는 분류 차원을 제외하여 18개의 분류 차원 중 8개에 대한 eHMI 주요 요인을 선별하였고, 해당 차원에 대한 직관적인 해석을 위해 설계 요인명을 재정의하였다(Figure 3).
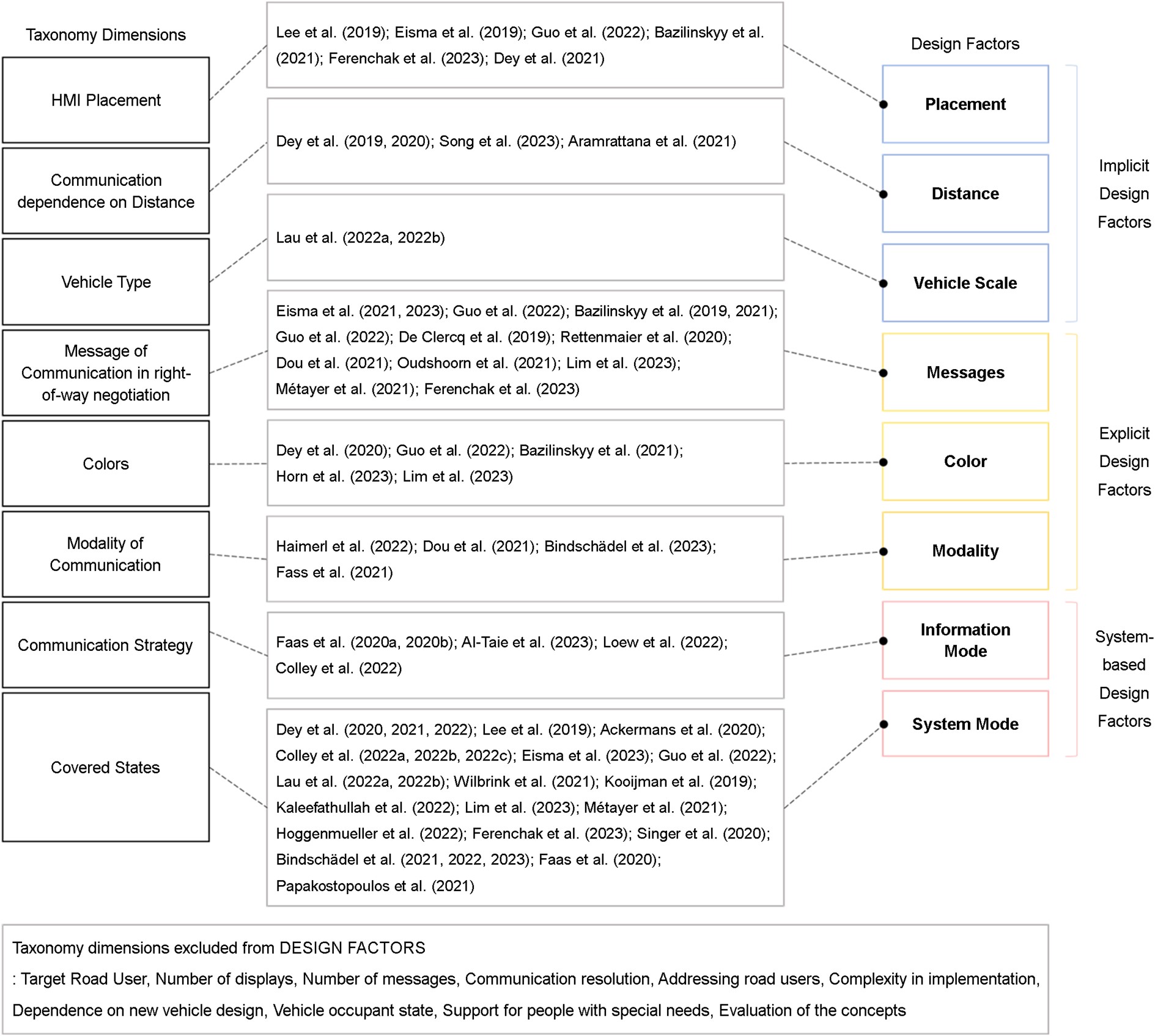
각각의 설계 요인들을 특성에 따라 명시적 설계 요인(Explicit Design Factors), 암시적 설계 요인(Implicit Design Factors), 시스템 기반 설계 요인(System-based Design Factors)로 분류할 수 있다. 명시적 설계 요인은 도로 이용자 관점에서 직관적으로 차량을 확인하였을 때 영향을 받을 수 있는 요인으로 정의하였고, 차량이 전달하는 메시지(Message), 색상(Color), 모달리티(Modality)로 구성되어 있다. 이와 다르게, 암시적 설계 요인은 eHMI에 내포되어 부차적인 의미를 전달하는 요인으로 정의하였으며, eHMI의 배치(Placement), 차량(eHMI)과의 거리(Distance), 차량의 규모(Vehicle scale)를 포함하고 있다. 마지막으로, 메시지에 담긴 정보의 유형인 정보 모드(Information mode)와 eHMI의 그 자체가 영향을 미치는 시스템 모드(System mode)는 시스템 기반 설계 요인으로 구분할 수 있다.
3.2 (RQ2) Detailed considerations for design factors
차세대 교통수단으로써 자율주행차량 개발이 가속화됨에 따라 기존의 도로 교통 상황에서의 의사소통이 전혀 다른 방식으로 전개될 것으로 예상되고 있고, 그에 적합한 eHMI 연구들이 활발하게 수행되고 있다. 표준 문서들 또한 기존의 차량 인터페이스 및 장치에 대한 기존 문서들에 자율주행 상황을 반영하여 일부 개정되고 있다. 하지만 eHMI의 효과성에 대한 정보들이 무분별하게 혼재되어 있으며, 실질적으로 eHMI를 개발할 때 적용할 수 있는 명확한 지침이 존재하지 않는다. 따라서, 본 내용은 앞서 언급한 문헌 분석을 바탕으로 정제된 8개의 eHMI 설계 요인과 세부 고려사항들을 포함하고 있다(Table 1).
|
Standard |
Design factor |
Considerations |
|
Implicit |
Placement |
The eHMI should be positioned in an appropriate position,
considering the viewing conditions and signal clarity of road users. Be located at the top of vehicle including the windshield and
roof. |
|
To clearly express road users' sense of safety and the intention
to concede autonomous vehicles, eHMI should be provided in a Road Projection
method. ※ Road projections should use affected
factors such as weather and environmental changes during the day and night. |
||
|
Distance |
From the point where visibility is secured, the eHMI should
provide the message of Vehicle driving status and intention information must be
communicated via eHMI from 25m with clear element distinction. (Low traffic and certain weather conditions) eHMI activation is
required when the distance from the pedestrian is at least 50m |
|
|
Vehicle scale |
In the case of large autonomous vehicles such as buses, eHMI is
actively needed to communicate with road users. |
|
|
Explicit |
Message |
Messages from the eHMI should be provided in appropriate form
depending on Use of nonverbal means of expression Be clearly presented through an egocentric message. |
|
Color |
The eHMI should be applied with new colors that do not cause
confusion with Blue-Green color space (Turquoise & Cyan) |
|
|
Modality |
How information is provided through modality affects the psychology
and behavior Single modality Visual modalities |
|
|
System |
System mode |
Notifying road users of the state of autonomous vehicles through
eHMI secures the safety of road users and affects their behavior. Explicitly changing the brightness and pattern of the light Signal flashing above 3Hz |
|
Information |
The eHMI should be provided in the form of information on the
intentions of autonomous vehicles. Intention-based communication |
3.2.1 Implicit design factors
eHMI에서 암시적(Implicit) 설계 요인은 eHMI가 제공하는 정보를 잘 전달하기 위해 내포된 차량 위주의 주요 속성들을 의미한다. 차량의 동작 역학 및 운동성을 기반으로 커뮤니케이션 하는 암시적 상호작용 방식을 설계 요인에 적용하였다(Dey et al., 2021). eHMI가 사용자에게 의도를 잘 전달하기 위해 반영되어야 하는 조건으로 정의하였으며 eHMI의 설치 위치, 명시성을 확보하기 위한 거리, 차량의 규모로 구성하였다. 해당 요인들은 차량 외부에 위치하는 eHMI가 어떤 위치에서, 어느 거리(시점)에서, 어떤 규모로 설계되는가에 따라 사용자의 인식 및 태도, 행동에 영향을 미치기 때문에 주요 설계 요인으로 고려되어야 한다.
Placement
많은 연구에서 eHMI가 배치되어야 하는 최적의 위치에 대해 논의하고 있다. Dey et al. (2020b)는 eHMI가 효과적인 메시지를 전달하는데 위치가 영향을 미친다는 점에 초점을 맞추어 'Placement'를 기준으로 eHMI 를 구분하였다. 본 연구는 해당 기준에 근거하여, 'Placement'가 eHMI의 유형을 구분 짓는 중요한 고려사항이자, eHMI의 가시성 및 사용자의 행동과 심리에 영향(Eisma et al., 2019)을 미치는 중요한 설계 요인임을 밝힌다.
(1) On-Vehicle
eHMI는 도로 이용자들의 시야를 확보하고 명확하게 인식이 가능한 위치에 배치되어야 한다. 대부분의 연구에서 On-Vehicle의 위치는 가장 명확하게 신호를 확인할 수 있는 위치이며, 이 중 도로 이용자들의 시선이 주로 집중되었던 앞 유리(windshield)와 차량 위에 두드러지게 나타날 수 있는 지붕(roof)에 eHMI를 배치하는 것이 효과적이다(Ackermann et al., 2019; Eisma et al., 2019). 특히, 보행자들은 차량이 접근하면 시선이 운전자가 앉아있는 유리창 영역을 중심으로 상단 위치에 고정되는 경향이 있다(Ackermann et al., 2019; Dey et al., 2019; Bazilinskyy et al., 2021). 이는 보행자가 차량 내 운전자와 상호작용하고자 함을 시사하며 자율주행차량에서는 운전자 대신 보행자와의 원활한 상호작용을 위해 가장 명확하게 신호를 인식할 수 있는 위치에 eHMI가 위치해야 함을 나타낸다. 즉, 도로 이용자들의 시야와 명확성을 고려하였을 때 eHMI를 차량의 상단부에 배치해야 한다.
(2) On the Road
도로 프로젝션(Road Projection)은 횡단 표시 및 화살표 등의 심볼을 도로 위에 투사(projection)하여 메시지를 전달하는 방식으로 도로 이용자들의 안전 여부 결정 속도 향상 및 자율주행차량의 양보 의도를 명확하게 하는데 효과적이다(Dey et al., 2021). 하지만 도로 프로젝션은 날씨, 주야간 환경 변화 등에 영향을 받아 시각적 주의 분산을 야기할 수 있기 때문에 유의해야 한다(Eisma et al., 2019).
Distance
eHMI는 가시성이 확보된 지점에서부터 도로 이용자들에게 자율주행차량의 메시지를 제공해야 하지만, 도로 이용자들은 자율주행차량으로부터 안전 거리 더 크게 확보하고자 한다. 특히, 보행자의 경우 차량과의 간격 크기 변화에 민감하여 더 빨리 횡단하거나 횡단 의지가 감소하는 등 행동에 영향을 받는다(Song et al., 2023). 차량 간의 의사소통에서도, 거리 정보를 eHMI로 제공하였을 때 사용자 경험이 향상되었으며 충돌이 감소하였다. 이는 도로 이용자들이 차량과의 거리에 민감하게 반응하며, 이를 통해 자율주행차량으로부터 안전성을 확보하고자 함을 시사한다. 따라서 eHMI는 도로 이용자들에게 충분히 더 먼 거리에서부터 활성화되어 정보를 제공하도록 해야 한다(Dey et al., 2020a).
도로 이용자가 안전을 느끼는 거리에 대해서도 연구되어진 바 있는데, 차량이 80~40m 떨어진 거리로부터 다가오고 있을 때 도로 이용자들의 길을 건너려는 의지(willing to cross)가 감소하게 된다(Dey et al., 2019). 이는 차량이 도로 이용자에게 80m 거리에서부터 eHMI를 통한 주행 상태에 대한 정보를 제공해야 함을 의미한다. 약 25m 거리부터는 도로 이용자가 차량의 상세 정보까지 구별 가능하기 때문에, 25m 이내에서는 차량의 상태 및 의도를 포함한 상세한 메시지를 표시해도 된다(Dey et al., 2019; Aramrattana et al., 2021).
Vehicle Scale
차량의 크기는 eHMI를 어떻게 배치해야 하는 가에 영향을 미친다. eHMI는 정면에서 차량을 바라보는 도로 이용자뿐만 아니라, 여러 방향에 있는 다수의 도로 이용자에게 신호를 전달할 수 있다(Wilbrink et al., 2021). 이로 인해 적절한 eHMI를 설계하기 위해 차량의 규모를 고려해야 한다. 또한, 버스와 같이 큰 규모의 차량은 일반 승용차 크기의 차량보다 도로 이용자들이 체감하는 압도감으로 인해 안전성이 낮다고 느끼기 때문에 보다 명시적인 eHMI의 필요성을 강조한다(Lau et al., 2022a, 2022b). 따라서 차량의 규모는 eHMI 설계 시 고려해야 하는 중요한 요인 중 하나이다.
3.2.2 Explicit design factors
eHMI 설계 시 고려해야 하는 요인 중 명시적(Explicit) 설계 요인은 자율주행차량이 도로 이용자와의 원활한 의사소통을 위해 eHMI가 명백하게 드러내야 하는 조건들을 의미하며, 메시지, 색상, 모달리티를 포함하고 있다. 외부에 설치하는 HMI로써 eHMI를 명시적 의사소통 방식으로 제시한 Dey et al. (2021)의 연구를 기반으로 eHMI의 속성에서 직관적으로 파악할 수 있는 요인들을 명시적 설계 요인으로 정의하였다. eHMI 명시적 설계 요인의 효과는 교통 상황 내에서 도로 이용자들과 차량의 커뮤니케이션을 원활하게 하며 교통 흐름에 긍정적인 영향을 미친다. 해당 요인들은 사용자의 관점 혹은 본래 내재하고 있는 개념에 따라 다르게 해석될 여지가 있기 때문에 기존의 교통 체계 및 문화적 요인을 고려한 적절한 설계가 필요하다.
Message
메시지는 자율주행차량의 상태 및 의도가 도로 이용자들에게 표시되는 정보이다. 정보를 어떻게 전달하는가에 따라 메시지의 전달력에 미치는 효과가 크기 때문에 가장 효과적인 방식을 적용하는 것이 중요하다. 이어서, 1) Message Means에서는 메시지를 어떠한 유형으로 전달해야 하는가에 대한 내용을, 2) Message Perspective에서는 누구의 관점으로 메시지를 전달해야 하는가에 대해서 다루고 있다.
(1) Message means
eHMI 메시지는 차량의 주행 상황에 따라 적절한 형태로 적용해야 한다. 메시지 표현 수단으로는 조명(Light), 글자(Text), 심볼(Symbol)과 픽토그램(Pictogram)을 활용할 수 있다. 다수의 연구에서 글자로 제공하는 것이 사전 학습 여부와 관계없이 가장 명확한 표시 방식임을 제시하고 있으나, eHMI가 교통 체제에 정착하는 장기적인 관점에서 글자로 정보를 제공하는 것은 복잡한 교통 상황 및 메시지가 전달되는 관점에 따라 혼란을 야기할 수 있다(Bazilinskyy et al., 2019). 이러한 한계를 보완하기 위하여 비언어적 표시 수단으로 설계하는 것을 고려해 볼 수 있다(Oudshoorn et al., 2021).
(2) Message Perspective
eHMI는 자기 중심적(egocentric) 메시지를 통해 명확하게 제시해야 한다. 자기 중심적으로 정보를 제공하는 것이 타인 중심적(allocentric) 관점 및 모호한 메시지보다 메시지의 명확성이 높았으며, 도로 이용자의 행동 패턴이 더 일관적이며 빠른 응답시간이 산출되었다(Eisma et al., 2021; Lim and Kwon, 2023). 또한, 자기 중심적 방식에서는 사용자가 인식하는 안전성 또한 높게 나타난다(Bazilinskyy et al., 2021).
Color
색상은 그 자체로 개념화되어 있으며, 교통 상황에서 특정 색상들은 이미 도로 이용자들에게 일정한 의미로 규정되어 있다(Green: Go, Red: Stop). 이에 eHMI에 활용되는 색상은 새로 도입되는 교통 신호인만큼 기존 교통 체계에서 사용되는 색과 의미를 일치시키거나, 명확히 구분되는 색상을 고려해야 한다(SAE J578, SAE Technical Papers 2019-01-0848). eHMI 색상은 기존의 교통 체계에서 사용하지 않으며, 도로 이용자들이 느끼는 안전에 대한 인식에 긍정적인 영향을 미치는 푸른 계열의 색상인 청록색 계열을 사용해야 한다(Faas and Baumann, 2021; Bazilinskyy et al., 2021). 붉은 계열의 색상은 경고 및 위험성 강조, 정보의 제공을 빠르게 인식시키는데 유효하지만 기존의 교통 체계에서의 색상 중복 및 혼잡한 교통 상황에서 혼란을 야기할 가능성이 매우 높기 때문에 사용하는데 주의해야 한다.
Modality
도로 이용자들은 차량의 단순 움직임(e.g., 차량의 형태, 차량의 속도 등)으로 자율주행차량을 인식하는 것보다 eHMI가 탑재되었을 때 차량을 인식하기에 용이하다(Bindschädel et al., 2023). 도로 이용자들이 효과적으로 인식한다는 것은 심리적 안전감에도 영향을 미쳐 행동에 영향을 줄 수 있다. 다양한 감각적 요소(e.g., 신호, 소음 등)가 존재하는 교통 상황에서 적절한 eHMI 모달리티는 도로 이용자들의 안전 확보에 중요한 역할을 한다(Faas and Baumann, 2021).
일반적으로는 다중 모달리티 개념이 효과적으로 평가되지만 eHMI의 경우는 단일 모달리티로 설계하는 것이 혼란을 야기하지 않고 더 효과적이다. 도로 이용자에는 어린이나 노약자 등 취약 계층이 포함되어 있기 때문이다. Haimerl et al. (2022)의 연구에서는, 지적 장애 도로 이용자의 경우 다중 모달리티 및 청각적 모달리티로 eHMI를 제공했을 때보다 단일 시각 모달리티로 제공했을 때 더 효과적이었음을 밝혔다. 이는 단일 및 시각적 모달리티로 eHMI를 제공하는 것이 모든 도로 이용자들이 보편적으로 편리하게 사용할 수 있는 방법임을 시사한다.
3.2.3 System-based design factors
eHMI는 자율주행차량과 함께 개발된 새로운 형태의 교통 장치로써, 교통 환경 내에서 다른 차량 및 도로 이용자들과 효과적인 커뮤니케이션 방법이 필요하다. 소통을 위해 eHMI가 지녀야 하는 시스템 기반의 설계 요인으로는 차량의 주행 및 의도에 대한 양상을 표현하는 시스템 모드(System mode)와 원활한 의사소통을 위해 제공해야 하는 정보의 방식에 대해 정리한 정보 모드(Information mode)가 있다.
System mode
자율주행차량의 eHMI는 보행자와 운전자 포함 다양한 도로 이용자들에게 안전감, 주관적 만족도 등의 심리적 요인과 실제 횡단 결정과 같은 행동 요인에도 영향을 미치므로 자율주행차량에서 eHMI는 필수적이다(Koojiman et al., 2019; Singer et al., 2020; Métayer and Coeugnet, 2021; Dey et al., 2022; Colley et al., 2022a, 2022c; Faas et al., 2020c; Guo et al., 2022; Lau et al., 2022b; Kaleefathullah et al., 2022; Ferenchak et al., 2023). 또한, 차량과 도로 이용자와의 원활한 상호작용 및 교통 흐름의 향상을 위해서는 eHMI를 통해 자율주행차량의 상태 및 다음 행동에 대한 의도 등을 나타내는 정보가 다른 신호와 명확하게 구별되어야 한다. eHMI 모드는 자율주행차량이 현재 어떤 상태인지, 앞으로 할 행동에 대한 의도를 차량 외부에 표시하는 방식을 의미한다. 전달하고자 하는 내용에 따라 구별되는 방식을 제공하고 그것을 인식하고 받아들이는 도로 이용자의 태도에 따라 적합한 eHMI 모드를 설정하는 것이 중요하다(Dey et al., 2022; Hoggenmueller et al., 2022). 시각적 수단을 통한 eHMI 설계에서 단일한 방식으로 조명이 정적인 상태를 띠는 것보다 동적으로 조명의 밝기 및 패턴이 변화하는 양식이 자율주행차량의 상태를 효과적으로 인식하며, 사용자가 더 먼 거리에서 효과적으로 인식할 수 있다. 또한 지각응답시간(Perception Reaction Time; PRT)을 감소시키기 위해 3Hz 이상의 신호 점멸이 필요하다(Lim and Kwon 2023).
Information mode
eHMI가 어떤 정보를 전달하는 것이 도로 이용자들에게 효과적인가에 대한 논의가 다수 이루어지고 있다(Colley et al., 2022d; Ackermann et al., 2019; Faas et al., 2020a). 도로 이용자들은 차량의 '상태' 정보만을 제공하는 eHMI가 '의도' 정보를 제시하는 eHMI보다 불안하다고 느꼈고, 도로를 횡단하는 시간 또한 증가하며 부정적인 영향을 미쳤다(Faas et al., 2020b). 추가 연구에서 eHMI가 '의도' 정보 유형을 나타낼 때 도로 이용자들의 혼란이 감소되었으며, 신호 체계를 긍정적으로 받아들임을 확인하였다(Wilbrink et al., 2021). 따라서, eHMI가 도로 이용자에게 차량의 의도 정보를 제공하는 것이 가장 효과적이다.
4.1 eHMI design factors and considerations
본 연구는 자율주행차량 eHMI 개발에 고려해야 할 설계 요인을 기반으로 한 초기 지침 세트를 작성하였다. eHMI의 설계 요인은 크게 8가지로 구성되어 있고 이들을 유기적으로 연결되어 있다. 따라서, 이러한 설계 요인은 개별적인 기준으로 사용될 수도 있으나, 여러 요인의 조합을 통해 긍정적 상호작용 효과를 기대할 수 있는 만큼 통합된 기준으로 활용한다면, 사용자 측면에 초점을 맞춰 설계 원칙을 수립할 수 있을 것이다.
4.2 Expanded eHMI considerations
본 연구에서는 다양한 연구와 실험 결과를 기반으로 eHMI 설계 요인을 통합적으로 조사하였다. 그러나 모든 맥락을 고려하기에 문헌 연구의 한계가 있었기 때문에, 확장된 관점에서 효과적인 eHMI 설계를 위한 추가적인 논의와 연구가 필요하다.
문헌 분석을 통해 확인한 현재 eHMI 연구들은 기존의 차량의 등화류를 고려하지 않거나, 등화류와 eHMI의 역할을 명확하게 구분하지 않고 혼용해서 배치하여 평가하는 방식이 주를 이루고 있다. Lee et al. (2022)은 연구 결과를 통해 기존 차량의 헤드라이트의 빛의 밝기와 익숙함으로 인해 배치 및 색상 등의 요인을 eHMI에도 적용하는 것이 효과적이라고 하였다(Lee et al., 2022). 그러나 eHMI는 기존의 운전자를 대체하여 보행자와의 의사소통을 위한 목적을 가지고 만들어진 장치이고, 헤드라이트는 도로에서 주행 차량 간의 소통을 주 목적으로 설계된 장치이다. 각기 상이한 목적을 가지고 구성된 차량 장치이기 때문에 역할을 혼용해서 사용하거나 추가 기능을 통해 기존 등화류에 통합하는 방식은 오히려 교통 혼란을 야기하여 사고를 유발할 수 있다. 따라서, 기존 조명 시스템과 eHMI 간의 서로 역할을 침범하지 않고 차량 외부에 효과적으로 구현하기 위한 연구가 추후 진행되어야 할 것이다.
eHMI 설계 요구사항들은 연구 및 국제 표준 일부를 바탕으로 제시하고 있지만 교통 체계 및 규범은 국가마다 차이가 있기 때문에 요구조건들을 적용함에 있어 각 나라의 환경에 맞게 검토할 필요성이 존재한다.
4.3 Limitation
eHMI 설계에 반영해야 하는 일련의 지침들은 실용성과 활용성을 위해 적용해야 하는 기준임이 분명하지만 eHMI 전부를 대변할 수 없음에 유의해야 한다. 먼저, 현재 시점에서 eHMI는 개발 단계에 있기 때문에 본 연구에서 분석한 대다수의 문헌은 연구자들에 의해 제작된 자체 테스트 트랙이나 시뮬레이션 환경에서 이루어진 결과를 제시하고 있다. 이는 실제 교통 상황에서 다수의 차량이 혼재된 상황을 반영하지 않기 때문에, 추후 실제 도로에서의 eHMI가 미치는 영향을 확인하기 위한 추가 연구가 필요함을 의미한다.
eHMI가 도로 이용자와의 상호작용을 위해 대체되는 기술이지만 본 연구에서 도로 이용자는 단순하게 차량으로부터의 정보를 "받는" 관점에서 설정하고 있다. 현재 eHMI를 통한 의사소통에 대한 연구는 eHMI가 양보와 관련된 정보를 알려 보행자가 대응하는 일방향 소통을 중심으로 다수 연구들이 수행되고 있다. 이를 통해 추후 양방향 소통과 관련된 연구가 필요함을 시사하고, 양방향 소통을 위한 eHMI 설계 요인은 본 연구 결과와 상이할 수 있다. 마지막으로, 본 연구는 체계적 문헌 고찰 방법을 사용하였지만 메타 분석을 적용하지 않았다. 추가 분석을 통해 정량적 수치를 보완한다면 보다 구체적인 설계 기준 또한 수립이 가능할 것이다.
본 연구에서는 자율주행차량 eHMI의 설계에 사용할 수 있는 관련성이 높은 표준 문서 및 다수의 연구 결과 기반의 자료를 정제하여 가이드라인을 제시한다. 자율주행차량 개발이 발전하고 있는 현 시점에서 eHMI 연구가 어떤 측면에서 이루어졌는지, 이들을 종합적으로 고려할 수 있는 설계 요인을 어떻게 설정해야 할지에 대하여 도입부와 문헌 조사 단락을 통해 설명하고, 결과 분석을 토대로 기준을 정립하고 세부 가이드라인을 설정하였다. 보행자와 운전자를 포함한 모든 도로 이용자와의 상호작용을 기반으로 원활한 교통 흐름을 위한 eHMI 설계 시 고려해야 요구사항을 크게 8개의 기준(모드, 메시지, 배치, 거리, 색상, 정보 유형, 차량 유형, 모달리티)으로 제안한다. 8가지 기준에 따른 eHMI는 원활한 의사소통 수단으로써 효과를 보장할 수 있다. 본 연구에서 제시한 eHMI 설계 요구사항은 각 기준을 독립적으로 활용하여 적용할 수도 있지만 복합적으로 활용 가능하다는 장점이 있다.
설계 요구조건 기준은 자동화 차량의 발전에서 자동차 산업에 도움이 될 수 있는 지침 세트이며, 완전 자율주행 도입이 빠르게 다가오고 있지만 명확한 가이드라인이 존재하지 않는 현 상황에서 모든 도로 이용자에게 안전한 도입을 지원하기 위한 기초적인 기준으로 활용할 수 있다. 본 연구에서 제시하는 가이드라인은 자율주행차량 eHMI의 개발을 안내하는데 적합한 미래 표준에 대한 더 큰 과학 및 기술 커뮤니티 내 토론을 자극하고, 기술 커뮤니티 내에서 더 빠른 융합을 촉진하는 수단으로 이 문헌을 통해 공유할 수 있다.
References
1. Ackermann, C., Beggiato, M., Schubert, S. and Krems, J.F., An experimental study to investigate design and assessment criteria: What is important for communication between pedestrians and automated vehicles?. Applied Ergonomics, 75, 272-282, 2019. https://doi.org/10.1016/j.apergo.2018.11.002
Google Scholar
2. Ackermans, S., Dey, D., Ruijten, P., Cuijpers, R.H. and Pfleging, B., The effects of explicit intention communication, conspicuous sensors, and pedestrian attitude in interactions with automated vehicles. In Proceedings of the 2020 Chi Conference on Human Factors in Computing Systems (pp. 1-14), 2020. https://doi.org/10.1145/3313831.3376197
Google Scholar
3. Al-Taie, A., Wilson, G., Pollick, F. and Brewster, S.A., Pimp My Ride: Designing Versatile eHMIs for Cyclists. In Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 213-223), 2023. https:// doi.org/10.1145/3580585.3607161
Google Scholar
4. Aramrattana, M., Habibovic, A. and Englund, C., Safety and experience of other drivers while interacting with automated vehicle platoons. Transportation Research Interdisciplinary Perspectives, 10, 100381, 2021. https://doi.org/10.1016/j.trip.2021.100381
Google Scholar
5. Bazilinskyy, P., Dodou, D. and De Winter, J., Survey on eHMI concepts: The effect of text, color, and perspective. Transportation Research Part F: Traffic Psychology and Behaviour, 67, 175-194, 2019. https://doi.org/10.1016/j.trf.2019.10.013
Google Scholar
6. Bindschädel, J., Krems, I. and Kiesel, A., Interaction between pedestrians and automated vehicles: Exploring a motion-based approach for virtual reality experiments. Transportation Research Part F: Traffic Psychology and Behaviour, 82, 316-332, 2021. https://doi.org/10.1016/j.trf.2021.08.018
Google Scholar
7. Bindschädel, J., Krems, I. and Kiesel, A., Active vehicle pitch motion for communication in automated driving. Transportation Research Part F: Traffic Psychology and Behaviour, 87, 279-294, 2022. https://doi.org/10.1016/j.trf.2022.04.011
Google Scholar
8. Bindschädel, J., Weimann, P. and Kiesel, A., Using eHMI, acoustic signal, and pitch motion to communicate the intention of automated vehicles to pedestrians: A Wizard of Oz study. Transportation Research Part F: Traffic Psychology and Behaviour, 97, 59-72, 2023. https://doi.org/10.1016/j.trf.2023.06.017
Google Scholar
9. Block, A., Lee, S., Pandya, A. and Schmitt, P., I See You! Design Factors for Supporting Pedestrian-AV Interaction at Crosswalks, In Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, 364-368, 2023. https://doi.org/ 10.1145/3568294.3580107
Google Scholar
10. Colley, M., Bajrovic, E. and Rukzio, E., Effects of pedestrian behavior, time pressure, and repeated exposure on crossing decisions in front of automated vehicles equipped with external communication. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems (pp. 1-11), 2022a. https://doi.org/10.1145/3491102.3517571
Google Scholar
11. Colley, M., Fabian, T. and Rukzio, E., Investigating the effects of external communication and automation behavior on manual drivers at intersections. Proceedings of the ACM on Human-Computer Interaction, 6(MHCI), 1-16, 2022b. https://doi.org/10.1145/ 3546711
Google Scholar
12. Colley, M., Hummler, C. and Rukzio, E., Effects of mode distinction, user visibility, and vehicle appearance on mode confusion when interacting with highly automated vehicles. Transportation Research Part F: Traffic Psychology and Behaviour, 89, 303-316, 2022c. https://doi.org/10.1016/j.trf.2022.06.020
Google Scholar
13. Colley, M., Wankmüller, B., Mend, T., Väth, T., Rukzio, E. and Gugenheimer, J., User gesticulation inside an automated vehicle with external communication can cause confusion in pedestrians and a lower willingness to cross. Transportation Research Part F: Traffic Psychology and Behaviour, 87, 120-137, 2022d. https://doi.org/10.1016/j.trf.2022.03.011
Google Scholar
14. De Clercq, K., Dietrich, A., Núñez Velasco, J.P., De Winter, J. and Happee, R., External human-machine interfaces on automated vehicles: Effects on pedestrian crossing decisions. Human Factors, 61(8), 1353-1370, 2019. https://doi.org/10.1177/ 0018720819836343
Google Scholar
15. Dey, D., Walker, F., Martens, M. and Terken, J., Gaze patterns in pedestrian interaction with vehicles: Towards effective design of external human-machine interfaces for automated vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 369-378), 2019. https://doi.org/10.1145/3342197.3344523
Google Scholar
16. Dey, D., Habibovic, A., Löcken, A., Wintersberger, P., Pfleging, B., Riener, A., Martens, M. and Terken, J., Taming the eHMI jungle: A classification taxonomy to guide, compare, and assess the design principles of automated vehicles' external human-machine interfaces. Transportation Research Interdisciplinary Perspectives, 7, 100174, 2020a. https://doi.org/10.1016/j.trip.2020.100174
Google Scholar
17. Dey, D., Habibovic, A., Pfleging, B., Martens, M. and Terken, J., Color and animation preferences for a light band eHMI in interactions between automated vehicles and pedestrians. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems (pp. 1-13), 2020b. https://doi.org/10.1145/3313831.3376325
Google Scholar
18. Dey, D., Holländer, K., Berger, M., Eggen, B., Martens, M., Pfleging, B. and Terken, J., Distance-dependent eHMIs for the interaction between automated vehicles and pedestrians. In 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 192-204), 2020c. https://doi.org/10.1145/3409120.3410642
Google Scholar
19. Dey, D., Matviienko, A., Berger, M., Pfleging, B., Martens, M. and Terken, J., Communicating the intention of an automated vehicle to pedestrians: The contributions of eHMI and vehicle behavior. it-Information Technology, 63(2), 123-141, 2021. https://doi.org/ 10.1515/itit-2020-0025
Google Scholar
20. Dey, D., van Vastenhoven, A., Cuijpers, R.H., Martens, M. and Pfleging, B., Towards scalable eHMIs: Designing for AV-VRU communication beyond one pedestrian. In 13th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 274-286), 2021. https://doi.org/10.1145/3409118.3475129
Google Scholar
21. Dey, D., Habibovic, A., Berger, M., Bansal, D., Cuijpers, R.H. and Martens, M., Investigating the Need for Explicit Communication of Non-Yielding Intent through a Slow-Pulsing Light Band (SPLB) eHMI in AV-Pedestrian Interaction. In Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 307-318), 2022. https:// doi.org/10.1145/3543174.3546086
Google Scholar
22. Dou, J., Chen, S., Tang, Z., Xu, C. and Xue, C., Evaluation of multimodal external human-machine interface for driverless vehicles in virtual reality. Symmetry, 13(4), 687, 2021. https://doi.org/10.3390/sym13040687
Google Scholar
23. Eisma, Y.B., van Bergen, S., Ter Brake, S.M., Hensen, M.T.T., Tempelaar, W.J. and de Winter, J.C., External human-machine interfaces: The effect of display location on crossing intentions and eye movements. Information, 11(1), 13, 2019. https://doi.org/10.3390/ info11010013
Google Scholar
24. Eisma, Y.B., Reiff, A., Kooijman, L., Dodou, D. and de Winter, J.C., External human-machine interfaces: Effects of message perspective. Transportation Research Part F: Traffic Psychology and Behaviour, 78, 30-41, 2021. https://doi.org/10.1016/j.trf.2021.01.013
Google Scholar
25. Eisma, Y.B., van Gent, L. and de Winter, J., Should an External Human-Machine Interface Flash or Just Show Text? A Study with a Gaze-Contingent Setup. Transportation Research Part F: Traffic Psychology and Behaviour (pp. 140-154), 2023. https://doi.org/ 10.1016/j.trf.2023.07.005
Google Scholar
26. Faas, S.M., Kao, A.C. and Baumann, M., A longitudinal video study on communicating status and intent for self-driving vehicle–pedestrian interaction. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems (pp. 1-14), 2020a. https://doi.org/10.1145/3313831.3376484
Google Scholar
27. Faas, S.M., Mattes, S., Kao, A.C. and Baumann, M., Efficient paradigm to measure street-crossing onset time of pedestrians in video-based interactions with vehicles. Information, 11(7), 360, 2020b. https://doi.org/10.3390/info11070360
Google Scholar
28. Faas, S.M., Mathis, L.A. and Baumann, M., External HMI for self-driving vehicles: Which information shall be displayed?. Transportation Research Part F: Traffic Psychology and Behaviour, 68, 171-186, 2020c. https://doi.org/10.1016/j.trf.2019.12.009
Google Scholar
29. Faas, S.M. and Baumann, M., Pedestrian assessment: Is displaying automated driving mode in self-driving vehicles as relevant as emitting an engine sound in electric vehicles?. Applied Ergonomics, 94, 103425, 2021. https://doi.org/10.1016/j.apergo.2021.103425
Google Scholar
30. Ferenchak, N.N., Longitudinal bicyclist, driver, and pedestrian perceptions of autonomous vehicle communication strategies. Journal of Traffic and Transportation Engineering (English edition), 10(1), 31-44, 2023. https://doi.org/10.1016/j.jtte.2022.07.005
Google Scholar
31. Guo, J., Yuan, Q., Yu, J., Chen, X., Yu, W., Cheng, Q., Wang, W., Luo, W. and Jiang, X., External human-machine interfaces for autonomous vehicles from pedestrians' perspective: a survey study. Sensors, 22(9), 3339, 2022. https://doi.org/10.3390/s22093339
Google Scholar
32. Haimerl, M., Colley, M. and Riener, A., Evaluation of Common External Communication Concepts of Automated Vehicles for People With Intellectual Disabilities. Proceedings of the ACM on Human-Computer Interaction, 6(MHCI), 1-19, 2022. https://doi.org/ 10.1145/3546717
Google Scholar
33. Hoggenmueller, M., Tomitsch, M. and Worrall, S., Designing Interactions With Shared AVs in Complex Urban Mobility Scenarios. Frontiers in Computer Science, 4, 866258, 2022. https://doi.org/10.3389/fcomp.2022.866258
Google Scholar
34. Horn, S., Madigan, R., Lee, Y.M., Tango, F. and Merat, N., Pedestrians' perceptions of automated vehicle movements and light-based eHMIs in real world conditions: A test track study. Transportation Research Part F: Traffic Psychology and Behaviour, 95, 83-97, 2023. https://doi.org/10.1016/j.trf.2023.02.010
Google Scholar
35. Jan, Q.H., Dahiwal, P. and Berns, K., Effective Visual Content of eHMI for Autonomous Vehicles in Pedestrian Zones, In International Conference on Robotics in Alpe-Adria Danube Region. Cham: Springer Nature Switzerland, 2023. 203-210, 2023. https:// doi.org/10.1007/978-3-031-32606-6_24
Google Scholar
36. Jung, S., Park, J., Park, J., Choe, M., Kim, T., Choi, M. and Lee, S., Effect of touch button interface on in-vehicle information systems usability, International Journal of Human-Computer Interaction, 37(15), 1404-1422, 2021. https://doi.org/10.1080/ 10447318.2021.1886484
Google Scholar
37. Kaleefathullah, A.A., Merat, N., Lee, Y.M., Eisma, Y.B., Madigan, R., Garcia, J. and Winter, J.D., External human-machine interfaces can be misleading: An examination of trust development and misuse in a CAVE-based pedestrian simulation environment. Human Factors, 64(6), 1070-1085, 2022. https://doi.org/10.1177/0018720820970751
Google Scholar
38. Kooijman, L., Happee, R. and de Winter, J.C., How do eHMIs affect pedestrians' crossing behavior? A study using a head-mounted display combined with a motion suit. Information, 10(12), 386, 2019. https://doi.org/10.3390/info10120386
Google Scholar
39. Lau, M., Jipp, M. and Oehl, M., One solution fits all? Evaluating different communication strategies of a light-based external human-machine interface for differently sized automated vehicles from a pedestrian's perspective. Accident Analysis & Prevention, 171, 106641, 2022a. https://doi.org/10.1016/j.aap.2022.106641
Google Scholar
40. Lau, M., Jipp, M. and Oehl, M., Toward a holistic communication approach to an automated vehicle's communication with pedestrians: combining vehicle kinematics with external human-machine interfaces for differently sized automated vehicles. Frontiers in Psychology, 13, 882394, 2022b. https://doi.org/10.3389/fpsyg.2022.882394
Google Scholar
41. Lee, Y.M., Madigan, R., Garcia, J., Tomlinson, A., Solernou, A., Romano, R., Markkula, G., Merat, N. and Uttley, J., Understanding the messages conveyed by automated vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 134-143), 2019. https://doi.org/10.1145/3342197.3344546
Google Scholar
42. Lee, Y.M., Madigan, R., Uzondu, C., Garcia, J., Romano, R., Markkula, G. and Merat, N., Learning to interpret novel eHMI: The effect of vehicle kinematics and eHMI familiarity on pedestrian' crossing behavior, Journal of Safety Research, 80, 270-280, 2022. https://doi.org/10.1016/j.jsr.2021.12.010
Google Scholar
43. Lim, D. and Kwon, Y., How to design the eHMI of AVs for urgent warning to other drivers with limited visibility?. Sensors, 23(7), 3721, 2023. https://doi.org/10.3390/s23073721
Google Scholar
44. Loew, A., Graefe, J., Heil, L., Guthardt, A., Boos, A., Dietrich, A. and Bengler, K., Go Ahead, Please!—Evaluation of External Human—Machine Interfaces in a Real-World Crossing Scenario. Frontiers in Computer Science, 4, 863072, 2022. https://doi.org/ 10.3389/fcomp.2022.863072
Google Scholar
45. Métayer, N. and Coeugnet, S., Improving the experience in the pedestrian's interaction with an autonomous vehicle: an ergonomic comparison of external HMI. Applied Ergonomics, 96, 103478, 2021. https://doi.org/10.1016/j.apergo.2021.103478
Google Scholar
46. Moher, D., Liberati, A., Tetzlaff, J., Altman, D.G. and PRISMA Group, Preferred reporting items for systematic reviews and meta-analyses: the PRISMA statement. Annals of Internal Medicine, 151(4), 264-269, 2009. https://doi.org/10.7326/0003-4819-151-4-200908180-00135
Google Scholar
47. Naujoks, F., Wiedemann, K., Schömig, N., Hergeth, S. and Keinath, A., Towards guidelines and verification methods for automated vehicle HMIs, Transportation Research Part F: Traffic Psychology and Behaviour, 60, 121-136, 2019. https://doi.org/10.1016/ j.trf.2018.10.012
Google Scholar
48. Oehl, M., Lau, M., Gehreke, L. and Wilbrink, M., Towards a Universal Explicit Communication Design of External Human-Machine Interfaces (eHMI) for Differently Sized Highly Automated Vehicles Evaluated by Different Pedestrian Age Groups, In International Conference on Human-Computer Interaction, 391-398, Cham: Springer Nature Switzerland, 2022. https://doi.org/10.1007/978-3-031-19682-9_50
Google Scholar
49. Oudshoorn, M., de Winter, J., Bazilinskyy, P. and Dodou, D., Bio-inspired intent communication for automated vehicles. Transportation Research Part F: Traffic Psychology and Behaviour, 80, 127-140, 2021. https://doi.org/10.1016/j.trf.2021.03.021
Google Scholar
50. Papakostopoulos, V., Nathanael, D., Portouli, E. and Amditis, A., Effect of external HMI for automated vehicles (AVs) on drivers' ability to infer the AV motion intention: A field experiment. Transportation Research Part F: Traffic Psychology and Behaviour, 82, 32-42, 2021. https://doi.org/10.1016/j.trf.2021.07.009
Google Scholar
51. Rettenmaier, M., Pietsch, M., Schmidtler, J. and Bengler, K., Passing through the bottleneck-the potential of external human-machine interfaces, In 2019 IEEE Intelligent Vehicles Symposium (IV), 1687-1692, IEEE, 2019. https://doi.org/10.1109/IVS.2019.8814082
Google Scholar
52. Rettenmaier, M., Schulze, J. and Bengler, K., How much space is required? effect of distance, content, and color on external human-machine interface size. Information, 11(7), 346, 2020. https://doi.org/10.3390/info11070346
Google Scholar
53. Singer, T., Kobbert, J., Zandi, B. and Khanh, T.Q., Displaying the driving state of automated vehicles to other road users: An international, virtual reality-based study as a first step for the harmonized regulations of novel signaling devices. IEEE Transactions on Intelligent Transportation Systems, 23(4), 2904-2918, 2020. https://doi.org/10.1109/TITS.2020.3032777
Google Scholar
54. Song, Y., Jiang, Q., Chen, W., Zhuang, X. and Ma, G., Pedestrians' road-crossing behavior towards eHMI-equipped autonomous vehicles driving in segregated and mixed traffic conditions. Accident Analysis & Prevention, 188, 107115, 2023. https://doi.org/ 10.1016/j.aap.2023.107115
Google Scholar
55. Wilbrink, M., Lau, M., Illgner, J., Schieben, A. and Oehl, M., Impact of external human-machine interface communication strategies of automated vehicles on pedestrians' crossing decisions and behaviors in an urban environment. Sustainability, 13(15), 8396, 2021. https://doi.org/10.3390/su13158396
Google Scholar
PIDS App ServiceClick here!