eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Okkeun Lee
, Seungbin Yim
, Hyochang Kim
10.5143/JESK.2024.43.4.285 Epub 2024 September 08
Abstract
Objective: To investigate the impact of repeated take-over experience in autonomous vehicles on the take-over response times and flow states during non-driving related tasks (NDRTs) of drivers across different age groups.
Background: As autonomous driving technology advances, understanding the dynamics of driver interaction, especially during take-over scenarios, becomes critical. Previous studies have indicated varying response times and flow states during autonomous driving, but few have systematically explored these aspects across different age groups with repeated take-over experiences.
Method: Using a driving simulator, the study compared young and older adult groups undergoing repeated take-over requests while engaged in an NDRT, specifically watching videos, within an autonomous driving context. Take-over response times and flow states with NDRT were measured and compared.
Results: The results showed that repeated take-over experiences significantly improved the response times, particularly for older adults. After multiple take-over experiences, the response time gap between the younger and older adults narrowed significantly. Furthermore, flow states during the NDRT of video watching increased across sessions, with no significant differences observed between age groups.
Conclusion: This study demonstrates that repeated exposure to take-over requests in autonomous driving can improve response times, particularly in older adults, and enhance the flow state during NDRTs. These outcomes emphasize the need to integrate such experiences into autonomous driving training and education, especially for different age groups.
Application: The research provides valuable insights for autonomous vehicle system design and driver education programs, highlighting the necessity for age-specific strategies.
Keywords
Autonomous driving Repeated take-over Take-over request Response tme Content flow state
자율주행이라는 미래는 기술의 발전과 함께 우리의 삶과 더 가까워지고 있다. 국제자동차기술자협회(SAE International)에서는 자율주행단계를 운전자의 참여 정도에 따라 5단계로 구분하고 있으며, 자율주행이라는 개념의 제시 이후 다양한 연구들은 지속적으로 수행되고 있다. 자율주행 3단계부터는 자율주행 시스템이 주행을 하는 상황에서는 운전 과제와 직접적으로 관련되지 않는 비운전과업(non-driving related tasks, NDRT)를 수행할 수 있게 되어, 운전자에게 새로운 환경을 제공할 것으로 예상되고 있다.
인간의 개입이 일부 필요한 조건부 자율주행인 자율주행 3단계는 자율주행 시스템과 운전자간 제어권을 주고받는 상황이 발생하는데, 운전자로부터 자율주행 시스템으로 제어권이 전환되는 상황과 자율주행 시스템에서 운전자로 제어권이 전환되는 상황으로 2가지로 분류된다. 자율주행 시스템은 특정 상황에서만 운전을 자동으로 수행할 수 있는 Operational Design Domain (ODD)을 가지고 있으며, 이 범위를 벗어날 때, 운전자는 자율주행자동차로부터 제어권을 넘겨받고 수동주행을 시작해야 한다(Melcher et al., 2015). 이처럼, 운전자가 자율주행 시스템으로부터 제어권을 넘겨 받아 자율주행에서 수동운전으로 전환하는 과정은 제어권 전환(take-over)으로 정의되며, 제어권 전환은 운전자의 의지와는 상관없이 발생한다는 점에서 운전자의 준비 상태에 따라 사고 발생 위험성이 존재한다.
Mok et al. (2015) 연구에서는 자율주행 3단계 환경에서 운전자의 상황 적응 및 작업 전환 시간을 고려하여 제어권 전환이 발생하기 5초에서 8초 전 제어권 전환 요청(Take-over Request, TOR)을 할 것을 제시하고 있다. Gold et al. (2013)에서는 5초와 7초의 제어권 전환 요청 시간을 비교하였는데, 7초의 제어권 전환 요청 시간이 5초보다 더 나은 제어권 전환이 이루어 지는 것을 확인하였다. 이처럼 기존의 연구 결과를 통해 운전자는 제어권 전환 요청과 제어권 전환 발생 시점의 시간 차이가 여유로울수록, 제어권 전환을 더 안전하게 수행할 수 있음을 확인할 수 있다. 제어권 전환 발생시, 자율주행 시스템과 운전자 사이의 상호작용에는 도로의 교통 상황, 날씨뿐만 아니라 운전자의 인지적, 신체적 특성도 영향을 크게 미친다(Huang and Pitts, 2022). 운전자의 인지적, 신체적 특성은 연령에 따라서 많은 차이가 발생하는데 고령의 운전자는 인지 능력, 인지 반응 시간, 민첩성 저하로 인해 운전 능력이 저하된다(Shaheen and Niemeier, 2001). 특히, 고령의 운전자는 이중 작업 수행 능력이 감소되어, 다양한 운전 상황에서 사고 발생률이 높게 나타난다(Kline et al., 1992; Ponds et al., 1988). 제어권 전환 연구에서도 연령에 따른 차이를 확인할 수 있는데, Ko and Lee (2023)의 연구에서는 고령자는 청년과 비교하여 자율주행 상황에서 NDRT 수행 능력이 떨어지며, 제어권 전환에 더 긴 시간이 필요한 것으로 나타났다. 또한, 운전자의 운전 경험은 제어권 전환에 영향을 미칠 수 있다(Morales-Alvarez et al., 2020). 전통적인 주행 상황에서 운전 경험과 교통 사고가 높은 상관관계가 있다는 것은 수동주행과 자율주행이 번갈아 발생하는 자율주행 3단계 환경에서 운전 경험이 많은 운전자가 제어권 전환을 더 잘 수행할 가능성이 있음을 시사한다(McDonald et al., 2019). 실제로 Chen et al. (2021)의 연구에서는 운전 경험이 많은 운전자가 초보 운전자에 비하여 제어권 전환을 더 안정적으로 수행하는 것으로 나타났다.
하지만, 이는 제어권 전환이 예정되어 있음을 가정하고 있다. 제어권 전환이 발생하는 시나리오 중 대다수는 매우 긴급한 상황이 발생하여 자율주행 시스템이 안정적인 자율주행을 유지하지 못한다고 판단했을 때 발생한다(McCall et al., 2019). Ou et al. (2021) 연구에서는 이와 같은 한계를 연구에 반영하여 긴급한 상황에서 다양한 형태의 차량 인터페이스를 고려한다면, 자율주행 3단계 환경에서는 최대한 빠르게 반응하였을 때 4초 정도의 제어권 전환 시간이 필요하다고 제시하였다. 운전자는 안전하고 원활한 제어권 전환을 위해 자율주행 상황에서 주의를 기울여야 하지만 기존 연구에 따르면 자율주행 상황에서는 운전 작업량 감소로 인해 운전자는 차량을 완전히 수동으로 제어하는 운전자에 비해 긴급한 상황에 반응하는 것이 어려울 수도 있는 것으로 나타났다(Vogelpohl and Vollrath, 2017; Naujoks et al., 2018). 더욱이 비운전과업을 수행할 수 있는 상황에서, 주행 상황에 대한 인식의 저하는 제어권 전환에 부정적인 영향을 미칠 수 있다(Dingus et al., 2016). 따라서, 자율주행 3단계 환경에서 제어권 전환에 필요한 시간뿐만 아니라 제어권 전환 발생시 운전자가 안전하게 제어권 전환을 이해할 수 있도록 도울 수 있는 연구적 접근 방법이 필요하다.
Ebbinghaus (2013)는 반복적인 작업 수행을 통해 개인의 학습 효과 및 과업 수행 능력을 증가할 수 있다고 하였다. Young and Stanton (2002) 연구에서는 실험실 환경에서 운전자가 긴급한 주행 사고 시나리오를 경험을 통해, 시나리오에 따라 적절한 상황 대처를 통해 사고를 피할 수 있었다. 최근에 수행되어온 대다수의 제어권 전환 연구에서는 제어권 전환에 필요한 시간에 초점을 맞추어 실험 조건 별 제어권 전환을 1회에서 2회 정도 수행하는데 그쳤으나, Petermeijer et al. (2017) 연구에서는 자율주행 3단계 환경에서 1.5분마다 동일한 제어권 전환 시나리오를 반복하여 운전자가 많은 수의 제어권 전환 경험을 통해 제어권 전환 시 브레이크 사용과 차량의 제동 위치가 개선되는 것을 발견했다. 따라서, 본 연구에서는 비주행과업을 함께하는 자율주행 3단계 환경에서 제어권 전환 경험 반복이 운전자의 제어권 전환 수행 능력과 비주행과업 몰입에 어떤 영향을 미치는지 확인하고자 한다.
2.1 Participants
본 연구에서는 연령에 따른 실험을 수행하기 위하여, 피험자를 청년과 고령자 2개 그룹으로 나누어 모집하였다. Retchin et al. (1988)는 운전에 필요한 신체적, 인지적 능력은 55세부터 감소한다고 하였다. 고령자는 65세 이상을 나타내지만 본 연구에서는 운전 과업을 포함하는 실험이므로, 기존 연구 결과에 따라 운전에 필요한 신체적, 인지적 능력이 감소하는 55세 이상을 고령자 그룹으로 모집하였다. 실험에 참가한 피험자는 총 34명으로 청년 그룹 18명, 고령자 그룹 16명이 참가하였다. 모든 피험자는 정상 범위의 시력과 운전 면허를 취득한지 1년 이상, 자차 운전 경험을 가지고 있었다. 실험을 수행하는데 있어 장비의 오류로 인해 데이터가 정상적으로 취득되지 않은 4명의 피험자를 제외한 총 30명의 데이터를 수집하였다. 청년은 27세부터 45세까지 15명(남 10, 여 5)으로 구성되었다(M= 36.1, SD=6.28). 고령자는 55세부터 76세까지 15명(남 9, 여 6)으로 구성되었다(M=61.4, SD=7.55). 피험자는 시간당 3만원의 실험참가비가 주어졌다.
2.2 Apparatus
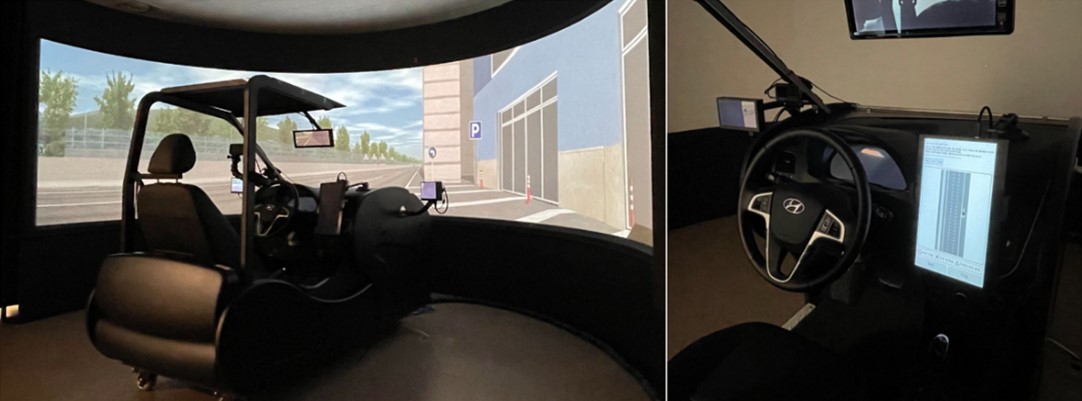
본 연구에서는 자율주행 구현이 가능한 SCANeR (Ver 2021.2) 기반의 주행 시뮬레이터를 사용하였다(Figure 1). SCANeR 프로그램을 통해 자율주행 환경과 제어권 전환 시나리오를 설계하였으며, 주행 시뮬레이터의 물리적으로 실제 차량과 동일한 운전석, 스티어링 휠, 기어변속기, 페달, 운전 좌석으로 이루어졌다. 본 연구에서는 비운전과업으로 영상 시청을 선정하였는데, 이를 위하여 운전석 우측 중앙의 센터페시아 부근에 영상 시청과 설문 조사가 가능한 13인치 터치 디스플레이를 설치하였다. 주행 시뮬레이터는 설계된 시나리오에 따라 수동주행에서 자율주행으로, 자율주행에서 수동주행으로의 제어권 전환을 운전자에게 요청한다. 제어권 전환 요청은 계기판에 설치된 디스플레이를 통해 Figure 2의 시각 알람과 음성 알람이 동시에 전달되었다. 운전자는 수동주행 상황에서 주행 시뮬레이터의 핸들 내 버튼을 눌러 자율주행으로 제어권 전환을 할 수 있으며, 자율주행 상황에서는 페달을 밟거나, 핸들을 조작함과 동시에 수동주행으로 제어권이 전환된다.

2.3 Measurements
본 연구는 제어권 전환 경험 반복이 제어권 전환 수행 능력과 비운전과업의 몰입 수준에 어떤 영향을 미치는지 확인하고자 하였다. 제어권 전환 수행 능력을 확인하기 위하여 제어권 전환 반응 시간(Take-over time; TOT)을 측정하였으며, 비운전과업의 몰입 수준을 확인하기 위하여 몰입 설문을 수행하였다.
TOT는 제어권 전환 알람 이후 운전자가 브레이크를 10% 이상 밟는 데까지 걸리는 제동 반응 시간(Braking reaction time)과 핸들을 1° 이상 돌릴 때 까지의 걸리는 조향 반응 시간(Steering reaction time)을 모두 포함한다. 반응 시간은 실험에 사용된 시뮬레이터를 통해 자동으로 기록되었으며, 본 연구에서는 제동 반응 시간과 조향 반응 시간 중 더 작은 값을 수집하였다.
몰입(Flow) 상태는 긍정적인 경험의 상태로 어떤 상태를 수행하는 수행자가 달성해야 하는 목적에 부합하는 기술을 가지고 있으며 이를 바탕으로 성과에 연결되는 것을 뜻한다(Jackson and Marsh, 1996). 본 연구에서는 Engeser and Rheinberg (2008)에서 제시한 10개 항목으로 구성되어 있는 Flow Short Scale (FSS) 설문을 기반으로 하여 비운전과업에 적합한 5개 설문 항목을 선별하여 비운전과업에 대한 몰입 수준을 측정하기 위한 설문으로 사용하였다(Table 1). 사용된 몰입 설문의 각 항목은 리커트 7점 척도(1 = "전혀 그렇지 않다", 4 = "어느 정도", 7 = "매우 그렇다")로 측정되었으며, 5개 항목의 평균값은 각 과업에 대한 몰입 수준을 나타낸다.
|
|
Flow short scale |
|
1 |
자율주행
중 영상을 보는 행위가 나는 적당히 할 만한 정도로 느꼈다. |
|
2 |
나는
영상 시청에 집중하는데 있어서 어려움을 겪지 않았다. |
|
3 |
나는
내가 했던 행동에 완전히 몰두해 있었다. |
|
4 |
나는
주변 상황이 잘 통제되고 있다고 느꼈다. |
|
5 |
나는
영상을 시청하는 상황 속에 빠져들어 있었다. |
2.4 Take-over scenario
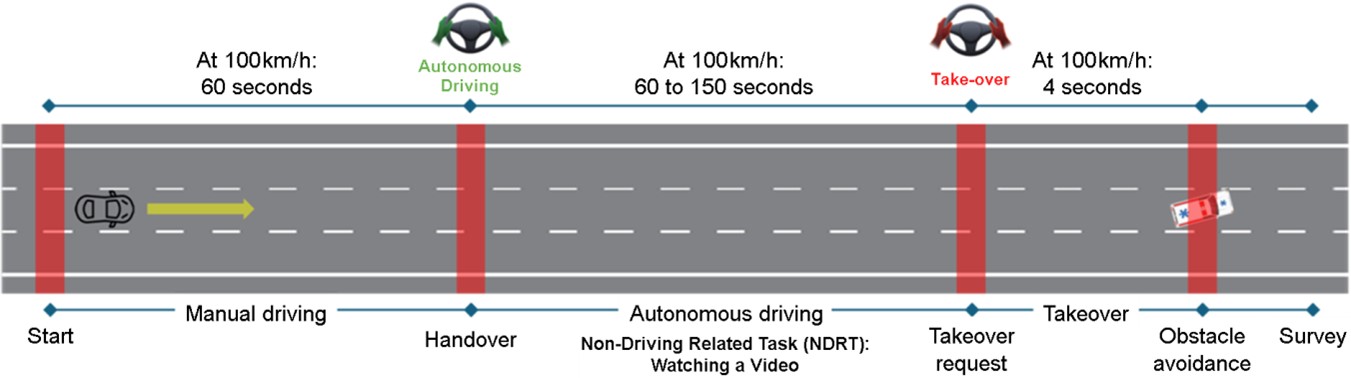
본 실험에서는 자율주행 상황에서 수동주행으로의 제어권 전환을 5번 반복하여 경험할 수 있도록 주행 시나리오를 설계하였다. 기본적인 주행 시나리오는 3차선 고속도로에서 차량의 속도는 100km/h를 기준으로 수동주행, 자율주행 전환, 자율주행 중 비주행과업 수행, 제어권 전환, 장애물 회피로 구성되어 있으며 Figure 3와 같다. 제어권 전환 상황은 운전자 차선 앞에 갑작스러운 도로 장애물(공사 현장, 차량 사고 등)이 등장하는 것으로 설계되었으며, 이때 운전자는 속도를 줄이거나 차선을 이동하여 충돌을 피할 수 있다. 본 연구에서는 긴급한 상황에서 제어권 전환이 발생하는 상황을 가정하여 Ou et al. (2021)의 연구 결과를 바탕으로 장애물 충돌 4초 전 제어권 전환 요청이 발생하도록 하였다.
또한, 5번의 제어권 전환 수행에서 각 자율주행 상황에 따른 비주행과업 몰입을 즉시적으로 측정하기 위하여 운전자는 장애물 회피 후 약 5초 뒤 시뮬레이터는 일시적으로 블랙아웃(Black out)되며 시뮬레이터 우측 중앙에 설치된 터치스크린을 통해 몰입 설문 조사를 수행한다. 설문 수행이 모두 종료된 이후 시뮬레이터의 블랙아웃은 해제되어, 운전자는 바로 다음 시나리오의 수동주행을 자연스럽게 시작한다.
본 연구에서는 자율주행 차량 공간에서 사용자 니즈를 분석한 연구 결과를 고려하여, 자율주행 중 비주행과업으로 가장 선호되는 영상 시청을 선정하였다. 세부 주행 시나리오를 설계하는데 있어, 피험자들의 시간에 따른 예측과 단순 반복 영향을 방지하기 위하여 장애물의 종류, 위치 및 5개의 세부 시나리오 별 자율주행 구간의 길이는 60~150초로 모두 다르게 설계하였으며, 영상 또한 모두 다른 다큐멘터리 영상을 시청하도록 설계하였다. 준비된 5개의 주행 시나리오를 모두 마치면 실험은 종료된다.
2.5 Procedures
피험자들은 실험에 앞서 간단한 연령, 성별, 운전 경험 등이 포함된 짧은 설문을 수행한 뒤, 실험 배경, 실험 목적, 실험 프로세스가 담긴 안내 영상과 시뮬레이터 주행 영상을 시청하였다. 피험자들은 실험을 시작하기에 앞서 주행 시뮬레이터에 착석하여 운전 좌석의 위치는 본인에게 맞게 조절하고, 주행 시뮬레이터의 제어권 전환 요청 신호를 경험하고 수동운전을 5분간 연습하여, 주행 시뮬레이터 환경에 적응할 수 있도록 하였다. 본 실험이 시작되면, 피험자들은 60초 정도 수동주행 후 자율주행 전환 알람과 함께 핸들의 버튼을 눌러 자율주행으로 전환하고 60초에서 150초 정도의 자율주행을 경험한다. 자율주행으로 전환됨과 동시에 우측 중앙에 설치된 스크린에서는 자동으로 영상이 재생되고, 피험자는 영상을 시청한다. 자율주행 도중 설계된 주행 시나리오에 따라 전방의 장애물이 나타나는 경우 충돌 4초 전, 제어권 전환 요청이 발생하고 피험자는 알람을 인지한 즉시 페달을 밟거나, 핸들을 움직여 전방의 장애물을 회피한다. 회피 이후에는 시뮬레이터는 자동으로 블랙아웃 되고 몰입 설문을 출력하여 비주행과업에 대한 설문을 수행하고, 설문이 종료되는 즉시 블랙아웃이 해제되어 다음 주행을 시작한다. 실험 중에는 실험과 관련된 모든 주행 데이터는 주행 시뮬레이터 시스템에 자동으로 기록된다. 설계된 5개의 주행 시나리오를 반복 수행을 마치면, 실험은 종료되고 이후 실험에 대한 인터뷰를 진행하였다.
2.6 Data analysis
수집된 데이터는 IBM SPSS Statistics (ver. 29.0.2.0)을 통해 분석되었다. 제어권 전환 경험 횟수가 연령에 따라 제어권 전환 반응 시간과 비주행과업의 몰입 수준에 어떤 영향을 미치는지 확인하기 위하여 반복측정 분산분석(Repeated Measures ANOVA)을 수행하였다.
3.1 Analysis result of TOR response time
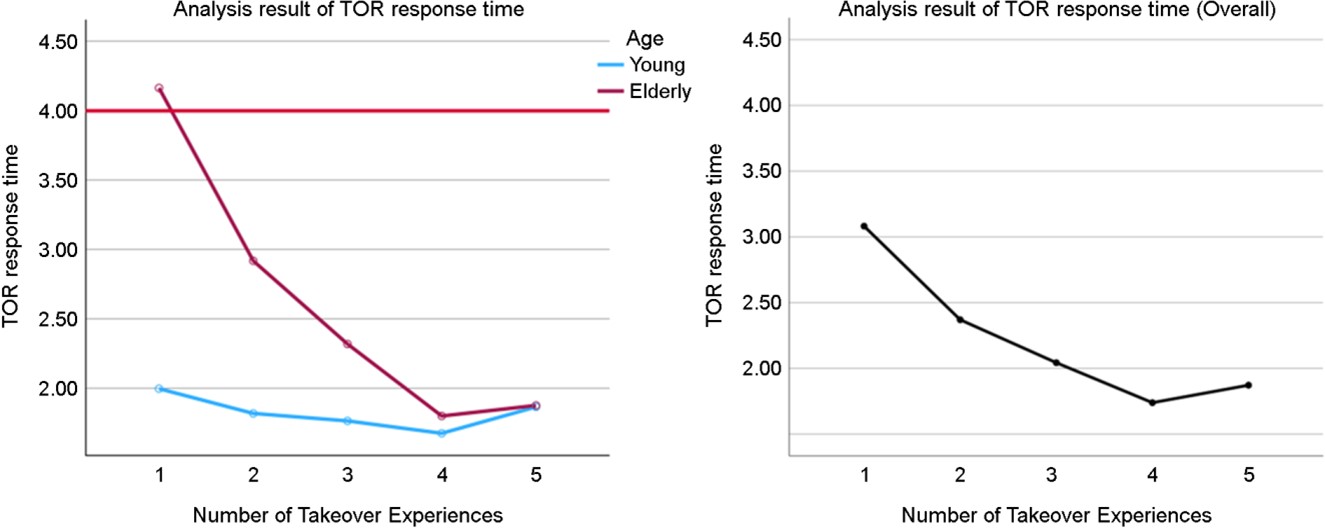
제어권 전환 경험 횟수가 연령에 따라 제어권 전환 반응 시간에 어떠한 영향을 미치는지 확인하기 위해 반복측정 분산분석을 실행하였으며, 경험 횟수에 따른 연령별 반응 시간은 Figure 4와 같다.
동질성 검정 결과에 따라 연령에 따라 나뉜 피험자 그룹의 공분산 행렬이 동일함을 확인하였다(p > .05). 하지만, 구형성 검정을 위배하여(W = .398, χ2(9) = 24.358, p < .05), Greenhouse-Geisser ε을 적용하여 분석을 진행하였다. Table 2의 분석 결과, 제어권 전환 경험 횟수에 따른 제어권 전환 반응 시간에는 유의한 차이가 있는 것으로 나타났다(F(2.97, 83.16) = 31.146, EGG = .742, p < .001). 연령에 따라 나뉜 피험자 그룹 간 제어권 전환 반응 시간에는 유의한 차이가 있는 것으로 나타났으며, 교호작용 검정을 통해 연령에 따라 제어권 전환 경험 횟수가 제어권 전환 반응 시간에 미치는 영향 차이가 유의한 것을 확인하였다(F(2.97, 83.16) = 21.002, p <.001).
|
Source |
|
Type III Sum of |
df |
Mean |
F |
p |
|
Number of takeover |
Greenhouse-Geisser |
34.443 |
2.970 |
11.597 |
31.146 |
<.001 |
|
Number of takeover |
Greenhouse-Geisser |
23.225 |
2.970 |
7.820 |
21.002 |
<.001 |
|
Error |
Greenhouse-Geisser |
30.964 |
83.158 |
0.372 |
|
|
교호작용이 확인되어, 제어권 전환 경험 횟수 별 시점에 따라 제어권 전환 반응 시간에 미치는 연령 그룹간 효과를 비교하기 위하여, 사후 검정을 수행하였다. 사후 검정 결과 첫 번째 제어권 전환 경험과 두 번째 제어권 전환 경험 시점에서 연령에 따른 제어권 전환 반응 시간에 유의한 차이가 있는 것으로 나타났으며, 세 번째 이후의 제어권 전환 경험 시점에서는 유의한 차이가 나타나지 않았다(Table 3).
|
|
Group |
M |
SD |
t |
p |
|
1st TOR |
Young |
1.998 |
0.609 |
-7.028 |
.000 |
|
Elderly |
4.165 |
1.026 |
|||
|
2nd TOR |
Young |
1.820 |
0.883 |
-3.94 |
.000 |
|
Elderly |
2.919 |
0.622 |
|||
|
3rd TOR |
Young |
1.766 |
0.596 |
-2.302 |
.029 |
|
Elderly |
2.320 |
0.717 |
|||
|
4th TOR |
Young |
1.677 |
0.478 |
-0.690 |
.496 |
|
Elderly |
1.801 |
0.512 |
|||
|
5th TOR |
Young |
1.867 |
0.556 |
-0.035 |
.972 |
|
Elderly |
1.877 |
1.026 |
3.2 Analysis result of flow
제어권 전환 경험 횟수가 연령에 따라 자율주행 상황에서 비운전과업 몰입 수준에 어떠한 영향을 미치는지 확인하기 위해 반복측정 분산분석을 실행하였으며, 경험 횟수에 따른 연령별 몰입 수준은 Figure 5와 같다.
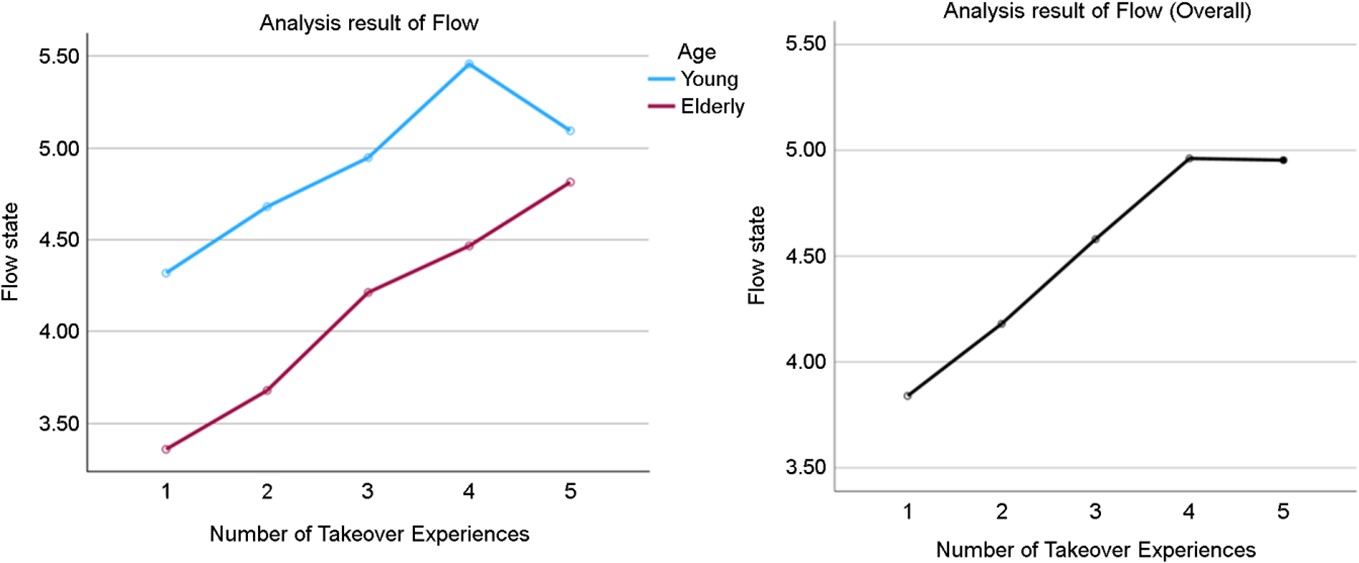
동질성 검정 결과에 따라 연령에 따라 나뉜 피험자 그룹의 공분산 행렬이 동일함을 확인하였으나(p > .05), 구형성 검정을 위배하여 (W = .334, χ2(9) = 28.941, p < .001), Greenhouse-Geisser ε을 적용하여 분석을 진행하였다. Table 4의 분석 결과, 제어권 전환 경험 횟수에 따라 자율주행 상황에서 비운전과업 몰입 수준에는 유의한 차이가 있는 것으로 나타났다(F(2.90, 81.31) = 16.563, EGG = .726, p < .001). 연령에 따라 나뉜 피험자 그룹 간 몰입 수준에는 유의한 차이가 있는 것으로 나타났으며, 연령에 따라 제어권 전환 경험 횟수가 몰입 수준에 미치는 영향 차이는 유의하게 나타나지 않았다(F(2.90, 81.31) = 1.615, p = .175).
|
Source |
|
Type III Sum of |
df |
Mean |
F |
p |
|
Number of takeover |
Greenhouse-Geisser |
28.901 |
2.904 |
9.953 |
16.563 |
<.001 |
|
Number of takeover |
Greenhouse-Geisser |
2.8818 |
2.904 |
.970 |
1.615 |
.194 |
|
Error |
Greenhouse-Geisser |
48.858 |
81.308 |
.601 |
|
|
본 연구에서는 반복된 제어권 전환 경험이 연령층에 따라 제어권 전환 반응 시간과 컨텐츠 몰입에 어떤 영향을 주는지 살펴보았다. 자율주행 자동차 또한 하나의 시스템이라는 것을 고려하면, 시스템에 대한 인간의 감지 및 진단에 대한 멘탈 모델은 경험에 많은 영향을 받는다(Wickens and Kessel, 1981). 또한, 많은 연구자들은 인간 요소를 고려하여 안전한 자율주행을 위하여 다양한 인지적 요인과 함께 운전자의 자율주행 환경에 대한 경험 여부를 고려해야 하는 하나의 큰 요인으로 제시하고 있다(Seppelt and Victor, 2016). 따라서 본 연구는 안전한 자율주행과 자율주행 환경에서 비주행과업에 대한 편안한 몰입을 제공하기 위한 기초 연구로 활용될 것으로 기대된다.
실험 결과, 제어권 전환을 반복해서 경험하게 되면 피험자들의 제어권 전환 반응 시간이 빨라지는 것을 알 수 있었다. 하지만 연령에 따라 제어권 전환 반응 시간의 변화는 다르게 나타났다. 청년 그룹은 같은 경우 제어권 전환을 반복하여도 반응 시간이 크게 줄어들지 않았으나, 고령자 그룹의 경우 제어권 전환을 반복할수록 반응 시간이 급격히 줄어드는 것을 확인할 수 있었다. 특히 본 실험에서 설계한 주행 시나리오에서는 충돌 4초 전 제어권 전환 요청 알림을 제공하였는데, 고령자 그룹의 경우 첫 번째 제어권 전환 경험에서는 4초 이상의 반응 시간을 보여 대부분 충돌로 이어지는 결과가 나타났으나, 실험 내에서 제어권 전환이 4번 이상 이루어졌을 경우에는 청년 그룹과 고령자 그룹의 반응 시간 차이가 거의 없는 수준까지 이르렀다. 이는 고령자의 경우 안전한 자율주행을 활용하기 위해서 제어권 전환의 교육과 경험이 필수적으로 필요함을 시사한다. 이러한 결과는 제어권 전환에 대한 연구, 자율주행 차량과 관련된 정책, 그리고 운전자 교육 시스템에 몇 가지 함의점을 제시할 수 있다.
먼저, 많은 선행 연구들이 반복되는 제어권 전환이 운전자의 반응 시간에 어떠한 영향을 미치는지 살펴보지 않았으며, 특히 연령별로 나누어 살펴본 연구는 찾아보기 힘든 실정이다. 하지만 부분 자율주행 시스템이 실제로 사용되는 현 시점에서 이미 많은 운전자들은 직, 간접적으로 제어권 전환을 경험하고 있으며 반복되는 제어권 전환으로 인해 일련의 자극-반응 시나리오들을 체득해가고 있다. Wright et al. (2016)의 연구에서는 초보 운전자는 경험 미숙으로 숙련된 운전자보다 상황 인식을 회복하는데 오랜 시간이 걸린다는 것을 나타냈다. 이러한 현실을 반영할 때 제어권 전환의 반복적인 경험이 사람들의 반응 시간, 운전 행동, 인식 등에 어떠한 영향을 미치는지 확인하는 것은 매우 중요하며 추후 시스템 설계와 교육에 있어서도 중요한 가이드라인을 제공할 수 있다. 특히 가장 큰 시사점을 주는 결과는 고령자의 반응 시간이 반복된 경험에 따라 급격히 줄어든다는 사실이다. McDonald et al. (2019) 연구에서는 수동주행 환경과 제어권 전환 상황에서의 운전자의 대응에서 많은 유사점이 있으며, 경험을 통해 큰 사고를 회피할 수 있을 것이라 밝혔다. 현재 고령 운전자들의 사고를 예방하기 위하여 고령 운전자의 면허갱신 주기를 단축하고 교통안전교육을 의무화하는 등의 정책을 펼치고 있다. 자율주행 시스템이 빠르게 발전함에 따라 어떤 내용을 어떠한 방식으로 교육해야 하는지 역시 빠르게 개편되어야 하며, 제어권 전환에 대한 교육 내용은 본 연구와 같은 실증적 자료를 기반으로 구축될 필요가 있다. 본 연구 결과를 바탕으로 제어권 전환 반응 시간의 안정화를 위해서는 최소한의 경험이 필수적으로 요구됨을 확인할 수 있으며 추후에는 조금 더 현실 타당도가 높은 형태의 검증을 통해서 연령에 따라 필요한 반복 경험의 횟수와 주기 등을 정량화 할 수 있을 것으로 간주된다.
다음으로, 본 연구에서는 자율주행 상황에서 컨텐츠 몰입에 대해 살펴보았다. 그 결과 연령별로 교호작용이 발견되지는 않았으나 전체적으로 피험자들이 반복된 제어권 전환 상황에서 컨텐츠 몰입도가 증가하는 것을 확인할 수 있었다. 자율주행 산업에서 안전이 확보된 상황에서는 차량 내 컨텐츠의 활용이 매우 중요하다. 현재까지는 다양한 형태의 신호를 통해 더 빠르고 사람들의 주의를 끄는 즉시적인 신호를 설계하는데 많은 연구가 초점을 맞추어졌다면, 본 연구 결과는 반복되는 제어권 전환 경험이 운전자의 전반적인 운전 상황에 대한 이해를 향상시켜 컨텐츠와 안전 모두 수용할 수 있는 수준으로 모두 학습이 되는 것을 확인할 수 있었다. 물론, 본 연구는 운전 시뮬레이션을 활용한 실험이므로 참가자들이 안전에 대한 인식이 실제 주행 환경보다는 매우 높았을 것으로 간주된다. 하지만 실제 환경에서 역시, 운전자들이 자율주행 상황에서 제어권 전환 상황에 익숙해지면 스스로 전반적인 운전 상황을 통제할 수 있다는 인식이 증가할 수 있으며 컨텐츠에 대한 몰입도 역시 증가할 수 있다. 이러한 결과는 또 하나의 시사점을 제공할 수 있다. 운전자들이 반복된 제어권 전환 경험을 실시한 후에는 부분 자율주행이 수행 가능한 운전의 범위를 넘어서 시스템에 대한 과도한 신뢰 혹은 통제 가능성을 형성할 수 있으며 그 결과 이차 과제인 시각적 컨텐츠에 과도하게 몰입하게 될 수 있다는 점이다. 따라서, 전방 주시가 지속적으로 필요한 2단계 혹은 3단계의 자율주행 상황에서는 자율주행 시스템의 수행 가능 범위를 지속적으로 운전자에게 알려주어 신뢰 조정(Trust calibration)이 이루어질 필요성이 있을 것이다.
청년 그룹의 경우, 4회 이상의 제어권 전환 반복 경험 이후에는 제어권 전환 시간이 증가하고 몰입이 줄어드는 것을 확인할 수 있다. 제어권 전환 반복 경험이 반복될수록 제어권 전환 시간이 개선되고, 몰입이 증가하는 고령자 그룹과 상이한 것을 알 수 있다. 이는 기술 수용에 따른 청년과 고령자의 특성에서 기인한 것으로 보인다(Chung et al., 2023; Han et al., 2023). 이처럼 새로운 경험에 대한 습득 속도와 경험에 따른 신뢰 조정이 연령별로 다른 영향을 미치며, 자율주행 시스템과 운전자 간의 조화롭고 안전한 주행 환경을 조성할 수 있도록 추후 장기간의 관찰 연구 수행이 필요할 것으로 보인다.
결론적으로 면허교육장 및 추후 자율주행 차량을 구입하는데 있어 특히 연령에 따라 교육 수준을 다르게 설계하여 안전하게 자율주행 시스템을 이해하고 활용할 수 있도록 제도적 노력이 필요할 것이며, 이에 따라 시행 횟수, 기간 등 세부적 요인들의 탐색을 위한 추가 연구가 요구된다. 또한, 본 연구에서는 비주행과업으로 많은 운전자들이 자율주행에서 수행하고 싶어하는 과업을 선정하여 영상 시청을 수행하였으나, 비주행과업에 따라서는 운전자가 수동 조작을 수행해야 하거나, 인지 부하가 과도하게 증가할 수 있는 등 비주행과업의 특성에 따라 운전자에게 미치는 영향은 매우 다양하다(Neubauer et al., 2012; Gold et al., 2018). 따라서, 비주행과업의 종류와 운전자의 수행 능력을 고려하여 연구적인 확대가 필요할 것이다. 이를 통해 안전한 자율주행 환경을 구축하고 기술적인 발전 뿐만 아니라 차량을 사용하는 운전자와 탑승자들의 이해 및 시스템 사용 수준을 동시에 증가시킬 수 있는 방안이 논의되어야 할 것이다.
References
1. Chen, F., Lu, G., Lin, Q., Zhai, J. and Tan, H., Are novice drivers competent to take over control from level 3 automated vehicles? A comparative study with experienced drivers. Transportation Research Part F: Traffic Psychology and Behaviour, 81, 65-81, 2021.
Google Scholar
2. Chung, S., Lee, A., Lee, H. and Park, P., An Exploratory Study for the Development of Intergenerational Exchange Mobile Application: A Survey of Mutual Perceptions and Attitudes between the Younger and Older Generations, Journal of the Korea Contents Association, 23(6), 568-577, 2023. doi:10.5392/JKCA.2023.23.06.568
Google Scholar
3. Dingus, T.A., Guo, F., Lee, S., Antin, J.F., Perez, M., Buchanan-King, M. and Hankey, J., Driver crash risk factors and prevalence evaluation using naturalistic driving data. Proceedings of the National Academy of Sciences, 113(10), 2636-2641, 2016.
Google Scholar
4. Ebbinghaus, H., Memory: A contribution to experimental psychology, Annals of Neurosciences, 20(4), 155-156, 2013. doi:10.5214/ ans.0972.7531.200408
Google Scholar
5. Engeser, S. and Rheinberg, F., Flow, performance and moderators of challenge-skill balance, Motivation and Emotion, 32, 158-172, 2008. doi:10.1007/s11031-008-9102-4
Google Scholar
6. Gold, C., Damböck, D., Lorenz, L. and Bengler, K., ""Take over!" How long does it take to get the driver back into the loop?" Proceedings of the Human Factors and Ergonomics Society 57th Annual Meeting, (pp. 1938-1942), San Diego. CA., 2013. doi:10.1177/1541931213571433
Google Scholar
7. Gold, C., Happee, R. and Bengler, K., Modeling take-over performance in level 3 conditionally automated vehicles. Accident Analysis & Prevention, 116, 3-13, 2018.
Google Scholar
8. Han, J., Mok, Y. and Jo, M., Effect of UI Design on Usability of Mobile Food Ordering Apps - Focusing on Moderating Effects of Age. Food Service Industry Journal, 19(6), 9-26, 2023.
9. Huang, G. and Pitts, B.J., The effects of age and physical exercise on multimodal signal responses: implications for semi-autonomous vehicle takeover requests, Applied Ergonomics, 98, 103595, 2022. doi:10.1016/j.apergo.2021.103595
Google Scholar
10. Jackson, S.A. and Marsh, H.W., Development and validation of a scale to measure optimal experience: The Flow State Scale, Journal of Sport and Exercise Psychology, 18(1), 17-35, 1996. doi:10.1123/jsep.18.1.17
Google Scholar
11. Kline, D.W., Kline, T.J., Fozard, J.L., Kosnik, W., Schieber, F. and Sekuler, R., Vision, aging, and driving: The problems of older drivers, Journal of Gerontology, 47(1), 27-34, 1992. doi:10.1093/geronj/47.1.P27
Google Scholar
12. Ko, Y. and Lee, J., Take-Over Time and Driving Performances by Driver's Age Group, Types of Non-Driving Related Tasks, and Road Complexity in Automated Driving, Journal of The Korean Data Analysis Society, 25(3), 1177-1192, 2023.
13. McCall, R., McGee, F., Mirnig, A., Meschtscherjakov, A., Louveton, N., Engel, T. and Tscheligi, M., A taxonomy of autonomous vehicle handover situations, Transportation Research Part A: Policy and Practice, 124, 507-522, 2019. doi:10.1016/j.tra.2018.05.005
Google Scholar
14. McDonald, A.D., Alambeigi, H., Engström, J., Markkula, G., Vogelpohl, T., Dunne, J. and Yuma, N., Toward computational simulations of behavior during automated driving takeovers: a review of the empirical and modeling literatures. Human Factors, 61(4), 642-688, 2019.
Google Scholar
15. Melcher, V., Rauh, S., Diederichs, F., Widlroither, H. and Bauer, W., Take-Over Requests for Automated Driving, Procedia Manufacturing, 3, 2867-2873, 2015. doi:10.1016/j.promfg.2015.07.788.
Google Scholar
16. Mok, B., Johns, M., Lee, K.J., Miller, D., Sirkin, D., Ive, P. and Ju, W., Emergency, automation off: Unstructured transition timing for distracted drivers of automated vehicles, Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, (pp. 2458-2464), Gran Canaria, 2015. doi:10.1109/ITSC.2015.396
Google Scholar
17. Morales-Alvarez, W., Sipele, O., Léberon, R., Tadjine, H.H. and Olaverri-Monreal, C., Automated driving: A literature review of the take over request in conditional automation. Electronics, 9(12), 2087, 2020.
Google Scholar
18. Naujoks, F., Höfling, S., Purucker, C. and Zeeb, K., From partial and high automation to manual driving: Relationship between non-driving related tasks, drowsiness and take-over performance. Accident Analysis & Prevention, 121, 28-42, 2018.
Google Scholar
19. Neubauer, C., Matthews, G. and Saxby, D., The effects of cell phone use and automation on driver performance and subjective state in simulated driving. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Vol. 56, No. 1, pp. 1987-1991). Sage CA: Los Angeles, CA: Sage Publications, 2012.
Google Scholar
20. Ou, Y.K., Huang, W.X. and Fang, C.W., Effects of different takeover request interfaces on takeover behavior and performance during conditionally automated driving. Accident Analysis & Prevention, 162, 106425, 2021.
Google Scholar
21. Petermeijer, S., Bazilinskyy, P., Bengler, K. and De Winter, J., Take-over again: Investigating multimodal and directional TORs to get the driver back into the loop. Applied Ergonomics, 62, 204-215, 2017.
Google Scholar
22. Ponds, R.W., Brouwer, W.H. and Van Wolffelaar, P.C., Age differences in divided attention in a simulated driving task. Journal of Gerontology, 43(6), 151-156, 1988. doi: 10.1093/geronj/43.6.P151
Google Scholar
23. Retchin, S.M., Cox, J. and Irwin, L., Performance-based measurements among elderly drivers and nondrivers. Journal of the American Geriatrics Society, 36(9), 813-819, 1988. doi:10.1111/j.1532-5415.1988.tb04265.x
Google Scholar
24. Seppelt, B.D. and Victor, T.W., Potential solutions to human factors challenges in road vehicle automation. Road Vehicle Automation, 3, 131-148, 2016.
Google Scholar
25. Shaheen, S. and Niemeier, D., Integrating Vehicle Design and Human Factors: Minimizing Elderly Driving Constraints, Transportation Research Part C: Emerging Technologies, 9(3), 155-174, 2001. doi:10.1016/S0968-090X(99)00027-3
Google Scholar
26. Vogelpohl, T. and Vollrath, M., Tiredness and level 3-automated driving. Unfallforschung der Versicherer, 2017.
27. Wickens, C.D. and Kessel, C., Failure detection in dynamic systems. In Human Detection and Diagnosis of System Failures (pp. 155-169). Boston, MA: Springer US, 1981.
Google Scholar
28. Wright, T.J., Samuel, S., Borowsky, A., Zilberstein, S. and Fisher, D.L., Experienced drivers are quicker to achieve situation awareness than inexperienced drivers in situations of transfer of control within a Level 3 autonomous environment. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Vol. 60, No. 1, pp. 270-273). Sage CA: Los Angeles, CA: Sage Publications, 2016..
Google Scholar
29. Young, M.S. and Stanton, N.A., Attention and automation: New perspectives on mental underload and performance. Theoretical Issues in Ergonomics Science, 3(2), 178-194, 2002.
Google Scholar
PIDS App ServiceClick here!