eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Jeewon Choi
, Satoshi Muraki
, Ping Yeap Loh
10.5143/JESK.2024.43.4.319 Epub 2024 September 08
Abstract
Objective: This study aims to observe how force output patterns alter when assistive force is provided during mechanically assisted force coordination with isometric elbow flexion.
Background: Force coordination between humans and assistive robots requires human muscle force to be released in response to mechanical assistance. However, little is known about how motor performance of muscle force release with assistive force is different from the one without assistance. This study investigated how force variability parameters of coefficient of variation (CV) of force output, sample entropy, and stabilization time alter during isometric force control with assistive force.
Method: Eleven male participants (mean: 24.4; SD: 1.5) participated in this experiment. Electromyography electrodes were placed on the surfaces of biceps and triceps muscles. The participant maintained an isometric elbow flexion force of 47N with the dominant arm along a linear trajectory shown on a screen. Under the conditions of assistive force provision, the assistive force was gradually provided as 25% or 50% of the isometric force for 0.5s by operating the actuator so that the participant could release their muscle force. Under the conditions where assistive force was not provided, the participant released their isometric force by 25% or 50% along with the visual guidance on the screen. From the manual force output, release stabilization time of force control was calculated and the CV and sample entropy were computed to represent size of force variability and time-series data irregularity, respectively.
Results: Regardless of whether assistance was provided, the activation of biceps and triceps brachii muscles decreased after force release. This study found that compared to the visually guided conditions, mechanically assisted conditions showed a lower CV, longer stabilization time, and higher sample entropy. When the muscle force was greatly released (50% release of the isometric force), a longer stabilization time and greater CV were observed, but the entropy was lower compared to the slight muscle force release (25% release).
Conclusion: This study suggests that when the magnitude of force release is relatively large, the size of force variability increases, while the irregularity decreases. This could imply that humans probably have potential adaptability for greater assistive force provided during mechanically assisted force coordination.
Application: The results of the current study can be used to determine the amount of assistive force provided during human-robot collaboration.
Keywords
Assistive force Force variability Electromyography Sample entropy Stabilization time Human-robot collaboration
최근 웨어러블 외골격 보조장비는 산업현장에서 작업자들의 신체적 피로와 스트레스를 저감하기 위한 공학적 대책으로 각광받고 있다. 작업자가 특정 관절에 외골격 장비를 착용하면 해당 관절을 사용하는 동작은 스프링 혹은 액추에이터와 같은 기계 작동을 통해 보조적인 힘(assistive force)을 받으며, 이러한 외골격 장비는 작업자의 신체적 부하 및 동작 관련 근육의 활성도를 낮추고 작업 지속성을 높이는 것으로 보고되고 있다(Theurel et al., 2018). 한편, 팔꿈치 또는 어깨와 같은 상지에 착용되는 외골격 보조장비는 중량물의 들기, 옮기기와 같은 수작업(manual handling task)을 보조하기 위해 사용되므로(de Looze et al., 2016; Huysamen et al., 2018), 장비 사용을 통한 신체적 부담의 경감여부 외에도 보조적인 힘과의 협동작업 시 작업자가 근력을 얼마나 정교하게 제어하는지의 운동 퍼포먼스(motor performance)를 분석하여 잠재적인 작업 저해요인을 추정할 필요가 있다.
외골격 보조장비와 협동작업을 하는 경우, 작업자의 운동 제어는 2가지 전략을 필요로 하게 되는데 하나는 보조적인 힘이 제공되는 만큼 근력을 해제(release)하는 것이며, 다른 하나는 동작의 주도권을 유지하기 위해 일정 수준 근력을 유지하는 것이다. 등척성 관절운동 시의 근장력 제어를 대상으로 하는 기존의 연구에서는 주로 근장력의 증가 혹은 유지 시의 특성 분석에 초점을 두었으며, 일부 연구는 근력을 해제하는 것이 근력의 증가에 비해 안정성이 더 낮아지는 것을 보여주었다(Naik et al., 2011; Orizio et al., 2010). 이는 대부분의 인간 동작에서 근력의 해제가 의식적 제어의 대상이기보다는 특정 동작이 완료된 이후 잔여 힘을 빠르게 제거하는 과정으로 여겨지기 때문이다(Suzuki et al., 2015). 그러나 익숙하지 않은 동작을 수행하는 경우 근력 해제를 위한 근육 이완은 원활하게 제어되지 않을 수 있으며(Sakurai and Ohtsuki, 2000), 기존 뇌과학 연구에서는 근력의 해제를 정교하게 제어하는 경우 실행 제어(executive control)를 담당하는 배외측 전전두엽 피질(dorsolateral prefrontal cortex)의 활동이 근력 증가에 비해 더 요구되는 것을 보여주었다(Nakata et al., 2014; Spraker et al., 2009).
한편, 작업자의 관절에 어느 수준의 보조적인 힘을 제공할 지의 여부도 신체적 부하 경감과 작업의 주도권 확보 가능성을 결정할 수 있다. 예를 들어 특정 관절에 순간적으로 많은 보조적인 힘을 발생시키는 경우, 근력 해제의 수요가 급격히 발생하여 일시적으로 작업의 주도권을 상실할 수 있으며(Choi et al., 2020), 보조적인 힘의 수준이 높아질수록 동작의 안정성을 확보하기 위해 오히려 근활성도의 감소가 원활하지 못할 수 있다(Kwon et al., 2014; Loh et al., 2020).
이렇듯 외골격 보조장비가 특정 관절로 보조적인 힘을 발생시키는 것은 작업자 측면에서는 예측하기 어려운 외부 요인으로 작용하며 근력 해제 시 안정적이고 정교한 운동 수행에 영향을 줄 가능성이 있다. 근력 제어의 안정성을 추정하기 위해 사용되는 대표적인 변수는 근력 변동성(force variability)이며, 일반적으로 로드셀을 사용하여 관절운동 시 근장력의 출력량(force output)을 측정하고 이 데이터의 편차를 표준편차 혹은 변동계수로 산출하여 분석한다. 그러나 이 지표는 단위시간 당 데이터 변동성의 크기만을 나타내며, 데이터가 시간에 따라 얼마나 불규칙하게 변동하는지에 대해서는 충분히 설명하지 못하는 제한점이 있다. 이에 대해 일부 운동학 연구에서는 순간적인 힘의 변화를 타깃 오버슈트로 산출하거나(Choi et al., 2019), 힘 출력량 데이터에 대한 샘플 엔트로피를 산출하는 방식을 제안하였다(Novak and Newell, 2017). 특히, 샘플 엔트로피는 시계열 데이터의 불규칙성을 정량화한 비선형적 변수이며, 해당 값의 증가는 시간에 따른 데이터 패턴의 불규칙성 증가를 나타내므로 힘 출력량 데이터 외에도 뇌파나 심박수의 변동 분석에도 활용되고 있다(Parbat and Chakraborty, 2021).
본 연구에서는 팔꿈치 굴곡의 등척성 수축을 통한 시각적 궤도 추적 과제 수행 시 액추에이터를 작동시켜 근력 증강을 제공하는 인간-기계 협동작업 시뮬레이션을 수행하였다. 과제 수행 중에는 팔꿈치 굴곡운동에 관여하는 두 근육인 상완이두근과 상완삼두근에 대한 근전도를 측정하였고, 등척성 수축 시의 근장력 데이터에 대해 데이터 변동성의 크기와 불규칙성, 안정화 시간을 산출하여 협동 운동 과제 시의 제어 안정성을 검토하였다.
2.1 Participants
11명의 20대 남성 참가자(나이: 24.4±1.5세, 신장: 174.8±5.4cm, 체중: 70.9±9.1kg)가 실험에 자발적으로 참여하였으며, 이들은 모두 과거에 근골격계 질환과 관련된 병력이 없고, 현재의 건강상태가 양호한 것으로 파악되었다. 모든 실험 참가자의 오른손잡이 여부는 에딘버러 손잡이 검사(Edinburgh Handedness Inventory) (Oldfield, 1971)를 사용하여 검정되었다.
2.2 Experimental setup
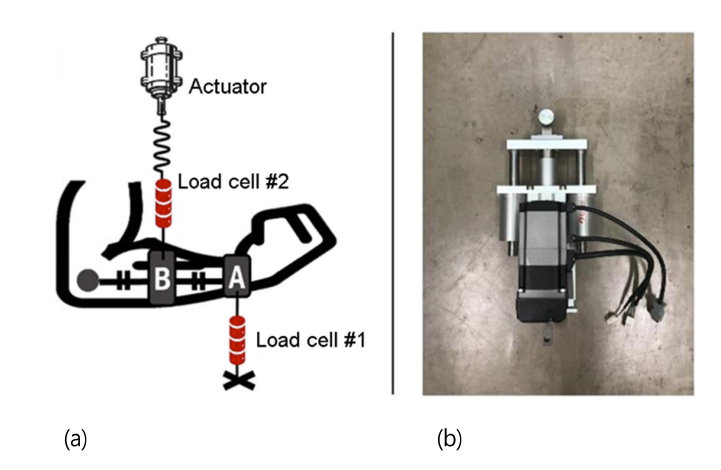
참가자는 의자에 앉아 1m 앞 눈높이에 위치한 모니터 화면을 바라보도록 지시되었다. 본 실험의 자세는 참가자가 오른쪽 상완을 상체에 붙인 상태에서 팔꿈치는 시상면을 기준으로 90도로 굽힌 자세를 유지하는 것이었으며, 손목에 스트랩 A를 장착하였다(Figure 1a). 이 스트랩 A는 체인을 사용하여 바닥과 수직으로 연결되었으며, 체인 사이에는 근장력 제어를 실시간으로 측정하기 위한 로드셀(T.K.K. 1269f; Takei Scientific Instruments Co., Ltd, Japan)을 장착하였다. 오른쪽 전완의 가운데 지점에는 또 다른 스트랩 B가 장착되었으며 이 스트랩에서 수직으로 윗 방향 약 70cm 높이에 위치한 액추에이터(Takei Scientific Instruments Co., Ltd) (Figure 1b)로 체인과 스프링을 사용하여 연결되었다. 스트랩 B와 인력장치 사이에도 로드셀이 장착되었다. 이러한 실험 환경에서 참가자가 등척성 팔꿈치 굴곡운동 과제를 수행하는 중에 액추에이터가 작동되면 스트랩 B의 위치에 대해 수직 윗 방향의 기계적인 힘을 제공하는 것으로 외골격 보조장비가 팔꿈치 관절운동에 보조적인 힘을 제공하는 상황을 시뮬레이션 하였다. 스트랩 A에 연결된 로드셀에서는 참가자의 팔꿈치 등척성 수축에 의한 근력 및 액추에이터로부터 발생한 보조적인 힘을 함께 측정하였으며(Ftotal), 전완의 가운데 위치한 스트랩 B에 연결된 로드셀에서는 액추에이터 작동 시 발생하는 보조적인 힘(Fassist)만을 측정하였다. 두 로드셀로부터 측정된 장력 데이터로부터 아래의 식 (1)을 통해 순수하게 참가자가 발생시키는 근장력(Fman)을 산출하였다.
2.3 Trajectory tracking task
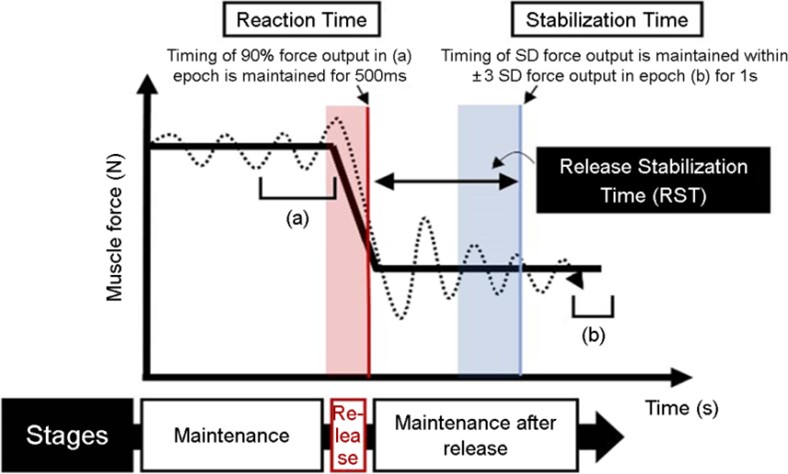
궤도 추적 과제(trajectory tracking task)는 컴퓨터 화면 상의 좌표 평면에 사전 설정된 근력 발휘의 목표값을 선형으로 표시하고, 실제 참가자의 근력 발휘량에 대한 시각적 피드백을 동시에 제공하여 실시간으로 피험자가 근력을 발휘하여 목표값을 최대한 정확하게 추적하도록 요구하는 운동 과제이다. 이러한 과제는 시각, 자기수용성 감각 및 관절운동 기능 등의 특성을 함께 파악할 수 있어 신경재활분야 연구의 실험 과제로써 폭넓게 활용되고 있다(Kenway et al., 2016; Naik et al., 2011). 본 연구에서는 평면의 x 축을 시간으로, y 축을 등척성 팔꿈치 굴곡운동 시의 근력 발휘 목표값과 스트랩 A에 연결된 로드셀에서 실시간으로 측정되는 장력 발휘량으로 설정하였다(Figure 2). 본 연구의 궤도 추적 과제는 시간경과에 따라 근력 유지, 해제, 해제된 근력 유지의 3단계로 실시되었다: (1) 과제 시작 직후 참가자가 7초 간 47N의 근력을 유지하도록 하고, (2) 근력 해제를 0.5초간 유도하는 직선 궤도가 화면 상에 표시되거나 액추에이터 작동을 통해 보조적인 힘이 0.5초 동안 일정하게 증가하여 근력 해제를 유도하고, (3) 최초 발휘된 근력 47N의 25% 혹은 50%를 해제한 상태에서 근력을 다시 7초 간 유지하도록 설계되었다. 47N의 기준 근력은 유사한 피험자군에 대해 기존 실험(Choi et al., 2019)에서 측정된 등척성 팔꿈치 굴곡 시의 최대 근수축 평균값인 157N의 30%로써 선정되었다.
2.4 Experimental design
본 연구에서는 근력 해제 방식(액추에이터 작동을 통한 해제, 시각적 가이드를 통한 해제)과 근력 해제 수준(기준 근력 대비 25% 해제, 50% 해제)의 2요인이 근력 발휘에 미치는 영향을 검토하기 위해 2*2 반복측정 설계를 계획하였다. 참가자는 각 조건을 총 5번 반복하였으며, 요인별 조건에 따른 실험 순서는 학습효과를 방지하기 위해 무작위로 배치되었다.
2.5 Measurements
팔꿈치 굴곡운동에 동원되는 상완이두근과 상완삼두근에 대한 운동 과제 수행 시의 활성도를 추정하기 위해 표면 근전도 검사를 실시하였다. 각 근육의 표면은 알코올 스왑으로 처리된 뒤 근육 섬유 방향에 따라 일회용 표면 전극이 부착되었다. 근전도 신호는 1,000배 증폭되었고 잡음은 대역 필터링(15~500Hz)을 통해 처리된 후 정류화(rectification)되었으며, 근전도 신호와 실험 환경에서 사용된 2대의 로드셀에서 발생한 신호는 A/D 변환기를 통해 각각 1kHz, 100Hz의 표본추출률로 수집되어 컴퓨터로 전송되었다. 근전도 신호가 안정적으로 수집되는 것을 확인한 후, 참가자들은 각 근육에 대해 최소 3번의 최대 근수축(MVC)를 측정하였다. 1회의 MVC 측정은 5초 동안 지속되었으며, 측정 간에는 1분의 휴식시간을 제공하여 근육 피로의 누적을 최소화하였다. 각 근육의 MVC 측정 중 중간 3초 동안의 정류화된 평균 진폭값(averaged rectified value)을 사용하여 해당 근육의 정규화된 근전도 신호를 산출하였다(%MVC).
2.6 Procedure
본 연구는 (1) 실험동의서 작성 및 실험 안내; (2) 상완이두근 및 상완삼두근에 대한 MVC 측정; (3) 궤도 추적 과제 훈련; (4) 본 실험인 궤도 추적 과제를 반복 실시하는 절차로 구성되었다. MVC 측정 후 각 참가자는 최소 두 번의 궤도 추적 과제를 훈련하였으며, 본 실험의 각 궤도 추적 과제 사이에는 3분의 휴식이 제공되었다. 전체 실험시간은 약 2시간 소요되었다.
2.7 Data analysis
본 연구에서는 근력 해제의 방식에 상관없이 동일한 수준으로 근력 해제가 통제되었는지 검토하기 위해 궤도 추적 과제 3단계의 마지막 2초 간 수집된 각 근육의 표면 근전도를 비교하였으며, 나머지 근장력 변수에 대해서는 궤도 추적 과제의 2단계인 근력 해제와 3단계인 해제 후 유지에 대한 종합 분석을 실시하였다. 아래의 근장력 데이터 관련 변수들은 모두 Fman으로 산출된 데이터를 바탕으로 계산되었다.
2.7.1 Release stabilization time
보조적인 힘이 즉각적으로 제공되는 것에 비하여 시각적 궤도에 대한 참가자의 반응은 지연될 수 있으므로 궤도 추적 과제의 근력 해제 전 1단계의 마지막 1초의 평균 값의 90% 수준이 500ms 동안 유지된 최종 시점을 해제 반응시간으로 설정하였고, 궤도 추적 과제 중 1초 간 근장력 발휘량의 이동 표준편차가 과제 3단계의 마지막 500ms 간 표준편차의 ±3배에 들어오는 최종 시점을 계산한 뒤 해제 반응시간을 감산하여 근력 해제 안정화 시간(RST)를 산출하였다(Figure 2).
근력 발휘 시의 변동성의 크기를 평가하기 위해 2단계와 3단계에서 수집된 근장력 데이터에 대한 변동계수(coefficient of variation; CV)를 산출하였으며, 근력의 불규칙성을 나타내기 위한 샘플 엔트로피를 계산하였다. 샘플 엔트로피는 슬라이딩 윈도우 크기(sliding window 혹은 embedded dimension)와 유사도 공차(similarity tolerance) 및 데이터 길이의 3개 변수를 설정하여 계산되며, 시계열 데이터의 반복성을 검증하기 위한 슬라이딩 윈도우는 2 혹은 3, 유사도 공차는 0.1에서 0.25 사이에서 주로 결정되는 것으로 알려져 있다(Montesinos et al., 2018). 본 연구에서는 슬라이딩 윈도우를 3으로 설정하고 유사도 공차를 0.2로 설정하여 샘플 엔트로피를 산출하였다. 엔트로피 계산에는 통계프로그램 R 4.3.3의 pracma 패키지를 활용하였다.
2.8 Statistical analysis
본 연구에서 산출된 데이터는 SPSS 프로그램(Version 24.0, IBM, Corp., NY, USA)을 사용하여 분석되었다. 모든 측정 변수의 정규성은 Shapiro-Wilk 검정을 통해 확인되었으므로(ps>0.05), 2 × 2 반복측정 분산분석을 실시하여 각 측정 변수에 대한 요인(근력 해제 방식, 근력 해제 수준)의 효과를 통계적 유의수준 0.05 미만에서 검정하였다.
본 연구에서 측정 및 산출된 종속 변수에 대한 분산분석의 결과는 Table 1에 정리하였다. 본 연구의 궤도 추적 과제의 근력 해제 후 유지 단계에서 최종 3초 간의 상완이두근과 상완삼두근 활성도를 분석한 결과, 근력 해제 방식에 대해서는 두 근육 모두 유의한 차이가 나타나지 않았으며, 근력 해제 수준에서 유의한 차이가 발생하였다(25% 해제 시 BB: 19.49±8.14%MVC; TB: 4.43±1.99%MVC; 50% 해제 시 BB: 15.13±5.15%MVC; TB: 4.11±1.54%MVC). 2요인 교호작용은 유의수준에서 차이가 나타나지 않았다.
|
Variable |
Source |
DF |
F |
p |
|
BB EMG amplitude of Last 3s (% MVC) |
Releasing method |
1 |
0.038 |
0.922 |
|
Released magnitude |
1 |
209.39 |
0.005** |
|
|
2-way Interaction |
1 |
1.035 |
0.578 |
|
|
TB EMG amplitude of Last 3s (% MVC) |
Releasing method |
1 |
0.180 |
0.289 |
|
Released magnitude |
1 |
6.47 |
0.016* |
|
|
2-way Interaction |
1 |
0.27 |
0.812 |
|
|
CV of force output (%) |
Releasing method |
1 |
194.280 |
0.00** |
|
Released magnitude |
1 |
3095.94 |
0.00** |
|
|
2-way Interaction |
1 |
31.17 |
0.00** |
|
|
Release stabilization time (s) |
Releasing method |
1 |
4.14 |
0.07 |
|
Released magnitude |
1 |
125.62 |
0.00** |
|
|
2-way Interaction |
1 |
3.67 |
0.08 |
|
|
Sample entropy |
Releasing method |
1 |
9.64 |
0.01* |
|
Released magnitude |
1 |
179.19 |
0.00** |
|
|
2-way Interaction |
1 |
4.93 |
0.51 |
|
|
*p
< 0.05; **p < 0.01 |
||||
변동계수에 대해서는 근력 해제 방식과 근력 해제 수준 모두 유의한 효과를 나타냈으며, 사후분석 결과 평균 변동계수는 시각보조 조건(20.79±9.51%, 보조적인 힘 제공 조건: 16.59±7.96%)과 50% 해제 수준(27.08±3.56%, 25% 해제 수준: 10.30±1.73%)에서 더 높게 나타났다. 2요인의 교호작용도 유의한 효과를 보였으며, 50% 해제 수준에서 시각보조의 평균 변동계수가 더욱 높게 나타나는 것을 알았다(Figure 3a).
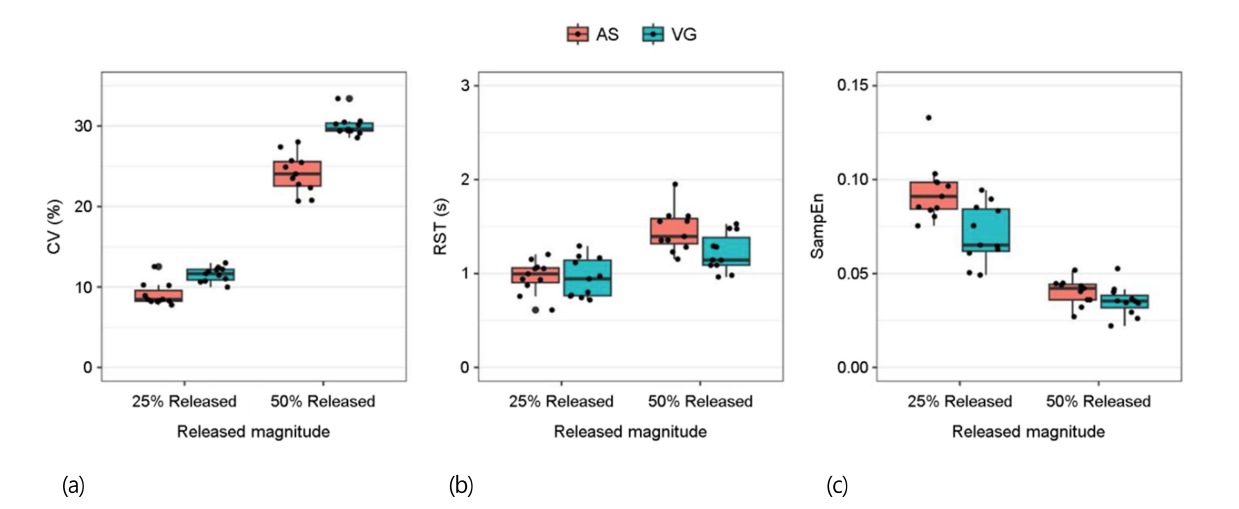
안정화 시간에 대한 분석을 통해 근력 해제 수준에서 유의성을 발견하였으며, 근력 해제 방식과 2요인 교호작용에서는 유의한 경향이 나타났다(p < 0.1). 사후분석 결과 평균 안정화 시간은 50% 해제 수준에서 더 높게 나타나며(1.34±0.24s, 25% 해제 수준: 0.96±0.19s)
보조적인 힘에 의한 근력 해제가 발생하는 경우 높은 평균 안정화 시간이 나타났다(1.21±0.32s, 시각보조 조건: 1.09±0.24s). 안정화 시간은 50% 해제 수준에서 보조적인 힘이 제공되는 경우 더욱 높게 나타났다(Figure 3b).
샘플 엔트로피에 대한 분석 결과 근력 해제 방식과 근력 해제 수준의 유의한 효과를 발견하였으며, 평균 샘플 엔트로피는 보조적인 힘이 제공되는 경우(0.07±0.03, 시각보조 조건: 0.05±0.02)와 25%의 해제 수준(0.08±0.02, 50% 해제 수준: 0.04±0.01)에서 각각 더 높게 나타나는 것을 알았다. 2요인 교호작용의 효과는 유의성이 발견되지 않았다(Figure 3c).
본 연구에서는 등척성 팔꿈치 굴곡운동 시 제공되는 보조적인 힘이 근력 해제 패턴에 주는 영향을 검토하기 위해 액추에이터 작동을 통해 보조적인 힘을 제공하여 근력 해제를 유도하거나 이를 모니터 화면 상에서 시각적으로 유도하는 방식을 비교하였다. 실험 결과, 근력 해제를 유도하는 방식과 무관하게 등척성 팔꿈치 굴곡운동 시의 관련 근육인 상완이두근과 상완삼두근의 마지막 3초 간 활성도는 유사하게 통제되었다. 그러나 보조적인 힘에 의한 근력 해제가 발생한 경우의 변동계수는 물리적인 요인이 포함됨에도 불구하고 시각보조에 의한 근력 해제에 비해 더 낮았으며, 근력 해제 수준이 클수록 변동계수는 크고 안정화 시간은 길게 나타났다. 한편, 샘플 엔트로피는 50% 근력 해제 수준에서 25% 수준에 비해 작은 값을 나타냈으며, AS에서 더 높게 나타나 변동계수와는 상반되는 결과를 나타냈다.
보조적인 힘에 의한 근력 해제는 해당 관절에 외부 동요(external perturbation)를 발생시키며 이는 근력 해제 시의 변동계수를 높일 것으로 전망되었으나, 본 연구 결과 오히려 시각보조에 의한 근력 해제 조건에 비해 낮은 값이 나타났다. 이는 관절에 가해진 동요가 동작 안정성을 저해하기 보다 오히려 중추신경계로부터의 강한 안정화 운동 명령을 촉진했을 가능성을 시사한다(Choi et al., 2020; Franklin et al., 2003). 즉, 외골격 보조장비가 작동되어 인간의 관절운동을 물리적으로 보조하고 근력 해제를 유도하는 상황에서 인간은 안정성을 유지하기 위해 변동성의 크기를 낮추려는 경향을 나타냈다. 한편, 이러한 보조적인 힘이 제공되는 경우에는 이를 안정화하기 위한 시간이 상대적으로 더 소요되는 것으로 나타났으며, 근력 해제의 수준이 높아질수록 더욱 긴 시간이 소요되었다.
한편, 변동계수의 결과와는 반대로 샘플 엔트로피는 보조적인 힘에 의한 근력 해제 조건에서 더 높게 나타났으며 이는 외부 동요를 일으키는 보조적인 힘이 근장력 제어 시 변동성의 크기를 낮출지라도 근장력 제어의 불규칙성을 증가시키는 것을 보여준다. 외골격 보조장비가 착용부위 관절에 보조적인 힘을 제공할 지라도, 이것이 어느 정도의 강도로 제공되는 지와 이에 따라 착용자가 근력을 어느 수준까지 해제할 지의 감각적 피드백을 받기는 어렵다. 보조적인 힘과의 협동 시 발생하는 이러한 불확실성은 근장력 제어 시의 샘플 엔트로피의 증가로 나타나는 것으로 보인다. 한편, 본 실험에서는 근력 해제 및 해제된 근력의 유지의 2가지 운동 과제만이 상정되었으므로 협동 운동 과제 수행 시 참가자의 예측가능성이 상대적으로 높았을 수 있으며, 실제 외골격 보조장비와의 협동 시에는 다양한 근력 제어 패턴이 실시간으로 발생하므로 샘플 엔트로피 측정을 통해 인간-기계 협동의 퍼포먼스와 안정성을 세밀히 검토할 필요가 있다.
근력 해제 수준이 50%로 크게 발생하는 경우, 변동계수도 크게 나타나며 이로 인해 안정화를 위한 시간도 더 오래 소요되었다. 그러나 샘플 엔트로피는 낮게 나타났는데, 근력을 크게 해제하는 것은 근육계의 불규칙성이 낮게 나타날 정도로 명확한 운동 명령이 중추신경계로부터 전달되는 것이거나(Svendsen et al., 2011), 완전한 근력 해제가 인간에게 상대적으로 자연스럽고 자동화된 동작이므로 근력 제어의 불규칙성이 낮게(즉, 예측 가능하게) 나타났을 수 있다(Roelofsen et al., 2018). 반대로, 25%의 근력 해제 조건에서 나타난 높은 샘플 엔트로피는 상대적으로 더 많이 동원된 운동 단위와 보존된 근력을 바탕으로 기계와의 협동에 적응하기 위한 인간의 다양한 제어 패턴이 시도되었을 가능성을 시사할 수 있다. 한편, 일부 연구에서는 근력 제어 패턴의 불규칙성이 오히려 최적의 작업방식을 찾아내기 위한 인간의 적응과정을 나타내며, 따라서 불규칙성의 증가가 퍼포먼스의 개선과 관련된다고 주장하므로(Suda et al., 2017) 보조적인 힘이 개입하는 인간-기계 협동작업에서 샘플 엔트로피가 갖는 의미를 다양하게 해석할 여지는 여전히 남아있다.
이 연구의 주요한 한계점으로는 시각보조에 의한 근력 해제를 통제변인으로 설정하여 보조적인 힘의 영향을 비교했다는 것이다. 궤도 추적 작업에서 실시간으로 변동되는 시각적 자극은 운동 계획 수립 및 실제 근력 발휘의 변동성에 지속적인 영향을 줄 수 있기 때문이다(Sosnoff et al., 2006). 또한, 실제 외골격 장비를 사용하는 작업자 관점에서는 근장력 추이와 기계적인 힘이 제공될 타이밍에 대한 시각적 정보를 실시간으로 확인하기 어려울 수 있다. 추후 연구에서는 시각보조 외의 감각적 매체를 활용하거나 감각적 매체를 배제하고 반복 훈련을 통해 근력 해제를 유도하여 보조적인 힘의 영향을 추가적으로 검토해야 할 것이다.
한편, 산업현장에서는 다양한 무게의 중량물에 대한 들기/옮기기 작업이 발생하지만 본 연구에서는 팔꿈치 관절의 등척성 굴곡 시 47N이라는 기준 힘만을 상정하고 두 가지 비율의 보조적인 힘을 제공하였다. 따라서 상대적으로 더 높거나 낮은 기준 힘에 대해서 다양한 비율의 보조적인 힘이 제공되는 경우 본 연구에서 발견한 패턴이 일관적으로 나타날 지에 대해서 추가적인 연구가 필요하다.
마지막으로, 본 연구에서는 팔꿈치 관절운동에 대한 보조적인 힘의 영향을 검토하였으나, 실제 외골격 보조장비는 팔꿈치 관절운동 외에도 중량물 들기/밀기 등의 작업에서 주로 적용되고 있다. 본 결과를 보다 현장에 직접적으로 응용하기 위해서는, 활용된 궤도 추적 방식을 여러 각도의 등척성 고관절 굴곡/신전에 대하여 응용하고, 본 결과와 비교하여 어떠한 근력 제어 및 근전도의 변화가 발생하는지 검토할 필요성이 있다.
작업자가 적응가능 한 수준의 보조적인 힘의 출력량을 설정하는 것은 외골격 보조장비 설계에서 중요한 문제이다. 본 연구는 등척성 팔꿈치 굴곡 중에 액추에이터를 작동하여 보조적인 힘을 제공하는 실험 환경을 구축하고 근력 해제 시 근장력 제어의 패턴을 분석하였다. 보조적인 힘을 제공하는 경우 근력 해제의 변동성 크기는 감소하였으나 안정화를 위한 시간은 길게 소요되었고, 근력 제어의 불규칙성은 증가하였다. 근력 해제 수준이 큰 경우에는 변동성의 크기는 증가하였지만, 불규칙성은 감소하였으며 이는 상대적으로 강한 보조적인 힘이 제공되었을 때 인간이 높은 적응능력을 가질 가능성을 시사한다.
References
1. Choi, J., Yeoh, W.L., Loh, P.Y. and Muraki, S., Force and electromyography responses during isometric force release of different rates and step-down magnitudes. Human Movement Science, 67, 102516, 2019. https://doi.org/10.1016/j.humov.2019.102516
Google Scholar
2. Choi, J., Yeoh, W.L., Matsuura, S., Loh, P.Y. and Muraki, S., Effects of mechanical assistance on muscle activity and motor performance during isometric elbow flexion. Journal of Electromyography and Kinesiology, 50, 102380, 2020. https://doi.org/ 10.1016/j.jelekin.2019.102380
Google Scholar
3. de Looze, M.P., Bosch, T., Krause, F., Stadler, K.S. and O'Sullivan, L.W., Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics, 59(5), 671-681, 2016. https://doi.org/10.1080/00140139.2015.1081988
Google Scholar
4. Franklin, D.W., Osu, R., Burdet, E., Kawato, M. and Milner, T.E., Adaptation to Stable and Unstable Dynamics Achieved by Combined Impedance Control and Inverse Dynamics Model. Journal of Neurophysiology, 90(5), 3270-3282, 2003. https://doi.org/10.1152/ jn.01112.2002
Google Scholar
5. Huysamen, K., Bosch, T., de Looze, M., Stadler, K.S., Graf, E. and O'Sullivan, L.W., Evaluation of a passive exoskeleton for static upper limb activities. Applied Ergonomics, 70, 148-155, 2018. https://doi.org/10.1016/j.apergo.2018.02.009
Google Scholar
6. Kenway, L.C., Bisset, L.M. and Kavanagh, J.J., Visually guided targeting enhances bilateral force variability in healthy older adults. Neurobiology of Aging, 37, 127-137, 2016. https://doi.org/10.1016/j.neurobiolaging.2015.10.003
Google Scholar
7. Kwon, S., Kim, Y. and Kim, J., Movement stability analysis of surface electromyography-based elbow power assistance. IEEE Transactions on Biomedical Engineering, 61(4), 1134-1142, 2014. https://doi.org/10.1109/TBME.2013.2295381
Google Scholar
8. Loh, P.Y., Hayashi, K., Nasir, N. and Muraki, S., Changes in Muscle Activity in Response to Assistive Force during Isometric Elbow Flexion. Journal of Motor Behavior, 52(5), 634-642, 2020. https://doi.org/10.1080/00222895.2019.1670128
Google Scholar
9. Montesinos, L., Castaldo, R. and Pecchia, L., On the use of approximate entropy and sample entropy with centre of pressure time-series. Journal of NeuroEngineering and Rehabilitation, 15(1), 2018. https://doi.org/10.1186/s12984-018-0465-9
Google Scholar
10. Naik, S.K., Patten, C., Lodha, N., Coombes, S.A. and Cauraugh, J.H., Force control deficits in chronic stroke: Grip formation and release phases. Experimental Brain Research, 211(1), 1-15, 2011. https://doi.org/10.1007/s00221-011-2637-8
Google Scholar
11. Nakata, H., Sakamoto, K., Honda, Y. and Kakigi, R., Somato-motor inhibitory processing in humans: Evidence from neurophysiology and neuroimaging. Journal of Physiological Sciences, 64(4), 233-252, 2014. https://doi.org/10.1007/s12576-014-0320-0
Google Scholar
12. Novak, T. and Newell, K.M., Physiological tremor (8~12Hz component) in isometric force control. Neuroscience Letters, 641, 87-93, 2017. https://doi.org/10.1016/j.neulet.2017.01.034
Google Scholar
13. Oldfield, R.C., The assessment and analysis of handedness: The Edinburgh inventory. Neuropsychologia, 9(1), 97-113, 1971. https://doi.org/10.1016/0028-3932(71)90067-4
Google Scholar
14. Orizio, C., Baruzzi, E., Gaffurini, P., Diemont, B. and Gobbo, M., Electromyogram and force fluctuation during different linearly varying isometric motor tasks. Journal of Electromyography and Kinesiology, 20(4), 732-741, 2010. https://doi.org/10.1016/ j.jelekin.2010.03.005
Google Scholar
15. Parbat, D. and Chakraborty, M., A Novel Methodology to study the Cognitive Load Induced EEG Complexity Changes: Chaos, Fractal and Entropy based approach. Biomedical Signal Processing and Control, 64, 2021. https://doi.org/10.1016/j.bspc.2020.102277
Google Scholar
16. Roelofsen, E.G.J., Brown, D.D., Nijhuis-van der Sanden, M.W.G., Staal, J.B. and Meulenbroek, R.G.J., Does motor expertise facilitate amplitude differentiation of lower limb-movements in an asymmetrical bipedal coordination task? Human Movement Science, 59, 201-211, 2018. https://doi.org/10.1016/j.humov.2018.04.011
Google Scholar
17. Sakurai, S. and Ohtsuki, T., Muscle activity and accuracy of performance of the smash stroke in badminton with reference to skill and practice. Journal of Sports Sciences, 18(11), 901-914, 2000. https://doi.org/10.1080/026404100750017832
Google Scholar
18. Sosnoff, J.J., Valantine, A.D. and Newell, K.M., Independence between the amount and structure of variability at low force levels. Neuroscience Letters, 392(3), 165-169, 2006. https://doi.org/10.1016/j.neulet.2005.09.010
Google Scholar
19. Spraker, M.B., Corcos, D.M. and Vaillancourt, D.E., Cortical and subcortical mechanisms for precisely controlled force generation and force relaxation. Cerebral Cortex, 19(11), 2640-2650, 2009. https://doi.org/10.1093/cercor/bhp015
Google Scholar
20. Suda, E.Y., Madeleine, P., Hirata, R.P., Samani, A., Kawamura, T.T. and Sacco, I.C.N., Reduced complexity of force and muscle activity during low level isometric contractions of the ankle in diabetic individuals. Clinical Biomechanics, 42, 38-46, 2017. https:// doi.org/10.1016/j.clinbiomech.2017.01.001
Google Scholar
21. Suzuki, T., Sugawara, K., Takagi, M. and Higashi, T., Excitability changes in primary motor cortex just prior to voluntary muscle relaxation. Journal of Neurophysiology, 113(1), 110-115, 2015. https://doi.org/10.1152/jn.00489.2014
Google Scholar
22. Svendsen, J.H., Samani, A., Mayntzhusen, K. and Madeleine, P., Muscle coordination and force variability during static and dynamic tracking tasks. Human Movement Science, 30(6), 1039-1051, 2011. https://doi.org/10.1016/j.humov.2011.02.001
Google Scholar
23. Theurel, J., Desbrosses, K., Roux, T. and Savescu, A., Physiological consequences of using an upper limb exoskeleton during manual handling tasks. Applied Ergonomics, 67, 211-217, 2018. https://doi.org/10.1016/j.apergo.2017.10.008
Google Scholar
PIDS App ServiceClick here!