eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Seulgi Kim
, Jaegeun Choi
, Sangeun Jin
10.5143/JESK.2024.43.6.463 Epub 2025 January 07
Abstract
Objective: The aim of this study is to develop recommendations for optimal analysis methods in non-contact work posture evaluation using a depth camera.
Background: The assessment of occupational loads, aimed at preventing musculoskeletal disorders, has primarily relied on manual methods such as photo and video recording. These methods, which depend on visual observation, have inherent limitations in accuracy and reliability. Therefore, recommendations on a non-contact evaluation system utilizing depth cameras are needed to enhance accuracy, reliability, and applicability in industrial settings while reducing costs.
Method: Five common working postures frequently observed in industrial sites were identified and defined. Two separate experiments were conducted. The first experiment used a depth camera, with independent variables set as working postures (5) and camera angles (5). The second experiment used manual evaluation, with the independent variable set as working postures (5). The OWAS (Ovako Working Posture Analysis System) action level result was used as the common dependent variable in both experiments. In the depth camera experiment, OWAS results were generated in real time using JACK human simulation software.
Results: In the depth camera experiment, accurate skeletal information was collected only at 0° and 45° angles. Other angles made measurements difficult, highlighting the challenge of accurate data collection when the subject's body is not fully within the camera's view. The posture involving a 180° body rotation was particularly challenging to measure and was excluded from manual assessments. However, OWAS evaluations were consistent between depth camera and manual assessments.
Conclusion: When assessing workload using depth cameras, evaluations can be easily conducted at any time through human simulation software, saving time and costs and providing real-time verification of results. It is essential to adjust the camera angle to ensure that equipment or objects do not obscure the worker's body. If obstacles are present, capture the worker's posture at angles between 0° (frontal) and 45°. For movements involving a 180° torso rotation, segment the task actions and reposition the depth camera before conducting the evaluation.
Application: These findings can serve as foundational data for evaluating work posture using depth cameras.
Keywords
Depth camera Manual material handling Human simulation JACK OWAS
1998년을 기점으로 근골격계질환(Musculoskeletal disorders, MSDs)으로 인한 질환자 수가 꾸준히 증가하고 있어, 이는 우리나라 산업 안전 보건 분야에서 계속된 문제로 간주되고 있다. 해당 질환으로 인한 기업 및 개인의 피해도 증가하고 있어, 이에 대응하여 2002년 12월에는 산업안전보건법 제 24조(보건상의 조치) 1항 5조가 신설되었다. 이에 따라 사업주는 단순 반복 작업이나 인체에 과도한 부담을 주는 작업으로 인한 건강 장해 예방을 위해 책임을 짊어지게 되었다. 이 법령은 근골격계 부담 작업이 있는 부서에서의 유해한 요인을 제거하거나 최소화 시키도록 규정하고 있다(Ministry of Employment and Labor, 2020).
이와 같은 법령과 시행령이 시행되었음에도 불구하고, 근골격계질환으로 인한 환자 수는 2013년의 5,446건에서 2016년에는 4,947건으로 다소 감소하는 추세를 보였으나, 2018년에는 6,715건으로 다시 상승하여 2016년 대비 약 36% 증가한 것으로 나타났다. 이는 Ministry of Employment and Labor (2011-2018)에서 발표한 산업재해현황분석에 따른 결과로 확인되었다. 근골격계 예방에 대한 법률 및 시행령에도 불구하고 지속적인 근골격계 질환자가 증가하고 있으며, 그에 따른 유해요인조사 및 작업부하 평가에 대한 인간공학적 개선과 연구가 필요한 실정이다.
근골격계 질환 예방을 위한 유해요인조사는 근로자들이 근무하는 환경에서 발생할 수 있는 유해한 인자들을 식별하고 분석하는 과정을 의미한다. 이러한 유해요인은 일상적인 근무 활동, 작업 환경, 및 작업 도구 등에서 비롯될 수 있으나, 근로자의 주관적인 경험 및 판단이 함께 작용하므로 객관적인 위험 평가의 어려움이라는 한계가 있다(Jeong, 2007). 따라서 정밀 평가가 필요한 경우, 작업부하 평가 도구를 활용하여 유해요인조사를 진행할 것을 권장하고 있다(Park et al., 2011). 그 중 대표적으로 널리 적용되어 사용되는 OWAS, RULA, REBA는 적용 사례 연구, 평가 도구의 비교 연구 등을 통해 어느 정도 신뢰성을 입증 받았으며, 미국 내 인간공학 전문가들(Certificated Professional Ergonomist)의 작업부하 평가 또는 재해보상 평가에 가장 많이 사용되는 도구는 RULA (Rapid Upper Limb Assessment) 51.6%, OWAS (Ovako Working Posture Analysis System) 21.4%, REBA (Rapid Entire Body Assessment) 17.9% 순으로 나타났다고 보고하였다(Park, 2006).
작업부하 평가 방법은 3가지 기법으로 분류 가능하다. 첫 번째, 전문 평가자가 직접 현장을 방문하여 작업부하를 평가하는 수작업 평가는 평가 결과의 신뢰도가 높지만, 평가 전문가가 직접 현장을 방문해야 한다는 불편함이 있다(Kim et al., 2007). 두 번째, 사진 및 비디오 영상 평가는 촬영된 영상 및 사진을 활용한 작업부하 평가 방법으로, 비교적 저렴한 비용으로 많은 작업들을 평가 가능하며 빠른 작업 동작을 반복해서 관찰할 수 있는 큰 장점이 있다(Diego-Mas and Alcaide-Marzal, 2014). 그러나 카메라 렌즈의 각도에 따라 신체 각도가 왜곡되어 평가의 신뢰도가 낮을 수 있는 제약이 있다(Knudson and Morrison, 2002; Lee, 2006). 현장을 직접 방문하는 방법과 사진 및 비디오 영상 평가의 주요 단점은 자세 평가 결과가 주관적일 수 있어 동일한 작업을 다른 전문가가 평가하면 다른 결과가 나올 수 있다는 것이며(David, 2005; Lunin and Glock, 2021), 수동으로 분석을 수행하는 데 시간이 많이 소요된다는 점도 부정적 영향으로 언급되었다(Dzeng et al., 2017; Manghisi et al., 2017). 마지막으로, 휴먼 시뮬레이션을 활용한 평가는 작업 현장 및 인물을 모델링 하는 방법과 깊이 인식 카메라를 활용한 방법으로 분류된다. 작업 현장 레이아웃과 인물을 모델링한 후, 시뮬레이션을 통해 생산성을 향상시키는 효율적인 모델링 기법이 있으나 인체 치수 및 공구 치수의 정밀한 측정 및 모델링이 필요하다는 단점이 있다(Oh, 2006). 깊이 인식 카메라를 활용한 평가는 휴먼 시뮬레이션 소프트웨어를 통해 작업부하를 실시간으로 분석 가능하며, 촬영된 인물의 골격 정보를 기준으로 움직임을 파악 가능한 이점이 있으나(Colombo et al., 2013; Park et al., 2023), 현재까지 각도에 따른 작업부하 분석에 활용할 수 있는 최적의 조건에 대한 참고자료가 부족한 상황이다.
따라서, 본 연구는 깊이 인식 카메라를 활용하여 작업부하를 평가하는 방법을 검토하기 위해 다양한 카메라의 촬영 각도를 고려하여 실험적으로 작업 자세를 평가하였다. 이를 통해 작업부하 평가 시 활용될 수 있는 시사점을 도출하는 것을 목표로 한다.
2.1 Experimental design
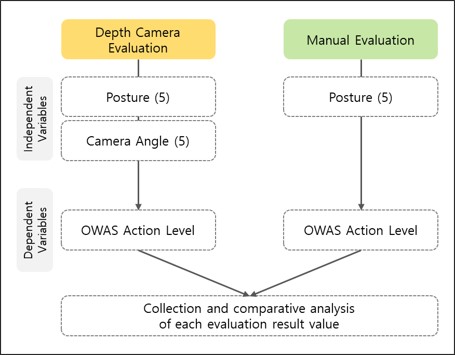
본 연구는 두 번의 독립적인 실험이 진행되었다. 깊이 인식 카메라 활용 실험과 수작업 평가 실험으로 분류하여 시행하였다.
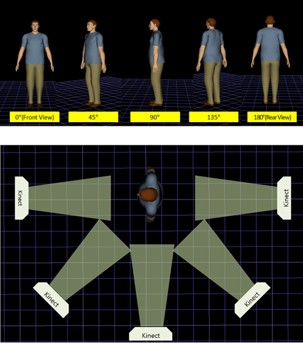
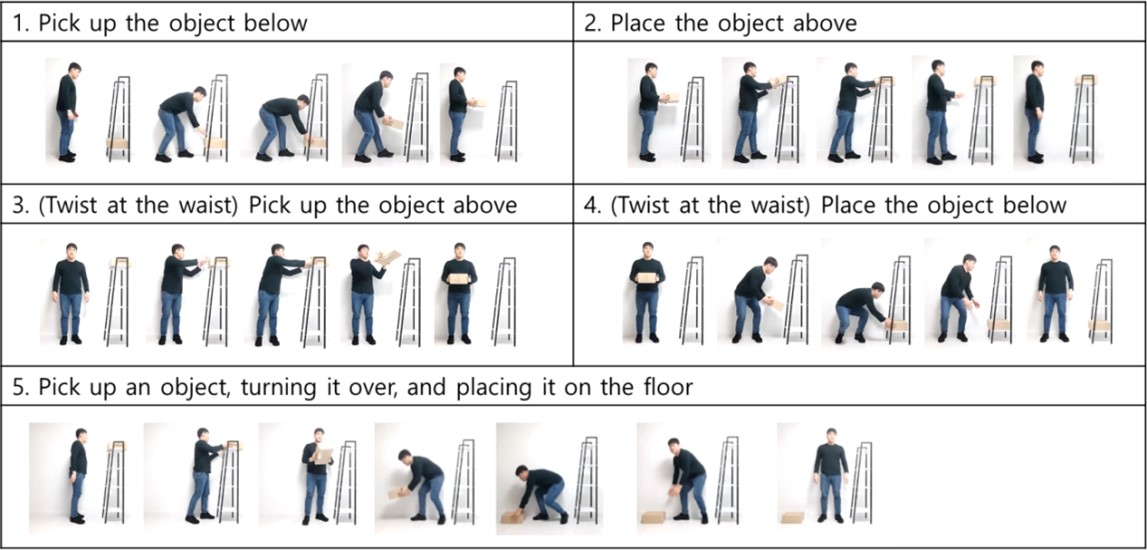
첫 번째, 깊이 인식 카메라 실험의 독립 변수는 작업 자세(5) 및 카메라의 각도(5)로 정의하였다. 작업 자세는 '아래쪽 물건 들기', '위쪽 물건 두기', '허리 비틀어 위쪽 물건 들기', '허리 비틀어 아래쪽 물건 두기', 그리고 '물건 들어 뒤돌아 바닥에 내려 두기'로 분류하였다. 또 다른 독립 변수인 카메라의 각도 또한 5가지로 분류하였으며, '0°(정면)', '45°', '90°', '135°', 그리고 '180°'로 정의하였다(Figure 1). 두 번째, 수작업 평가의 독립 변수는 작업 자세(5)이다. 작업 자세는 위의 깊이 인식 카메라 실험과 동일한 변수로 진행하였다(Figure 2). 두 가지 실험의 공통적인 종속 변수는 OWAS 분석 결과이며, 깊이 인식 카메라를 활용한 실험은 각도에 따른 OWAS 결과 값을 추가로 비교 분석하였다. 본 연구에 사용된 OWAS 분석 방법을 사용한 이유는 OWAS가 사용이 간편하고 반복적인 작업 환경에 적합하며 신속한 평가와 표준화된 분류 체계를 제공하기 때문이다. 반면, REBA와 RULA는 더 정밀한 평가를 제공하지만 분석 시간과 복잡도가 높아 본 연구의 목적과 환경에는 적합하지 않았다.
본 연구에서 신장은 177cm, 몸무게는 95kg, 연령은 30대 후반으로 한국 국적을 가진 연구대상자 1명을 대상으로 실험을 진행하였다. 해당 대상자는 깊이 인식 카메라 실험 및 수작업 평가를 시행하였으며, JACK의 인체 모델 설정도 연구대상자의 신체 조건과 동일하게 조정하였다.
2.2 Experimental tool
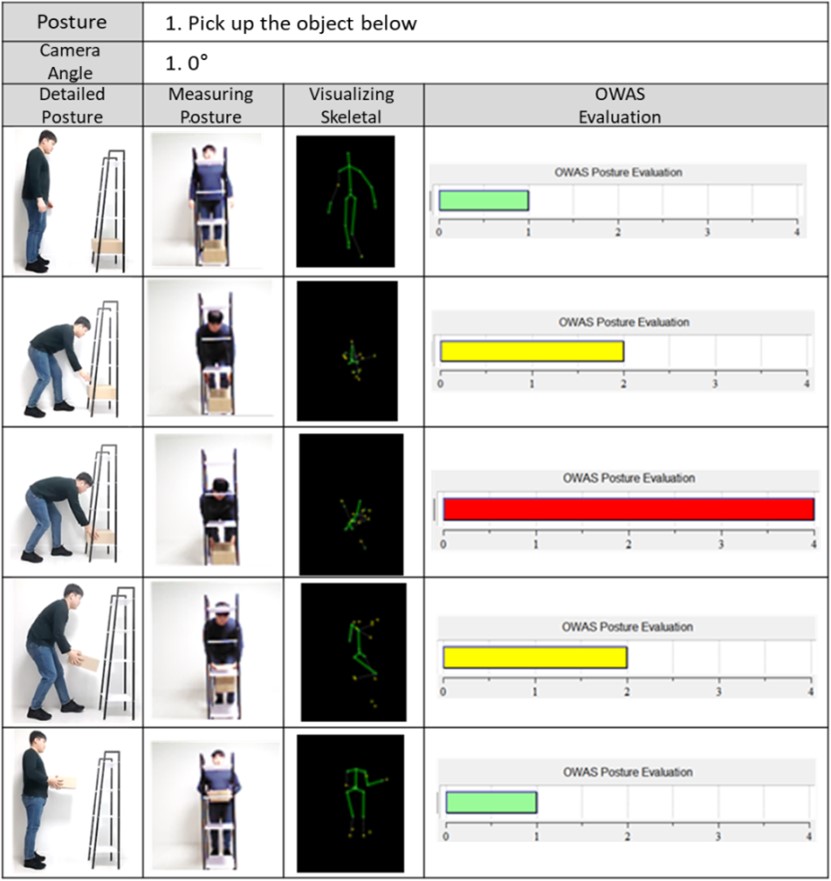
본 연구에서 JACK 8.0 (Siemens, USA)을 활용하여 깊이 인식 카메라의 정보를 분석하였으며, 깊이 인식 카메라는 Kinect V1 (Microsoft, USA)를 사용하였다. 깊이 인식 카메라와 평가 대상의 위치는 지면으로부터 90cm 높이 및 깊이 인식 카메라로부터 230cm 거리에 평가 대상을 위치시켰다(Figure 1). 깊이 인식 카메라를 사용하여 골격 형상(skeleton)의 정보를 JACK을 통해 확인할 수 있었고, OWAS 분석 결과는 해당 소프트웨어 내 분석 도구를 활용하여 움직임에 따른 실시간 분석이 가능했다. Figure 2는 자세의 이해를 돕기 위하여 정면에서 촬영한 결과를 보여주고 있으며, 실험은 각 각도에 맞게 진행되었다. Figure 3은 정면(0°)에서 촬영된 자세를 보여주고 있으며, 골격 정보의 수집 과정에서 물건과 선반이 겹쳐 보일 수 있다. 이로 인하여 일부 관절이 누락되거나 왜곡되어 나타날 수 있다. 이러한 한계는 3.1장에 더욱 자세히 설명되어 있다.
2.3 Procedure
실험 방법으로는 첫 번째, 실험 대상 자세를 정의한다(Figure 2). 두 번째, 깊이 인식 카메라와 JACK을 활용하여 다양한 각도에서 정의된 자세의 작업부하를 평가한다. 세 번째, 전문가가 OWAS 평가 도구를 활용하여 수작업으로 작업부하 평가를 시행한다. 깊이 인식 카메라를 활용한 실험은 해당 각도에 카메라를 고정시킨 후 5개의 자세를 촬영하고, 이후 카메라의 위치를 옮겨 동일한 5개의 자세를 반복 촬영하는 방식으로 진행되었다. 실험에 대한 대략적인 절차는 Figure 4와 같다.
3.1 Results of depth camera measurements
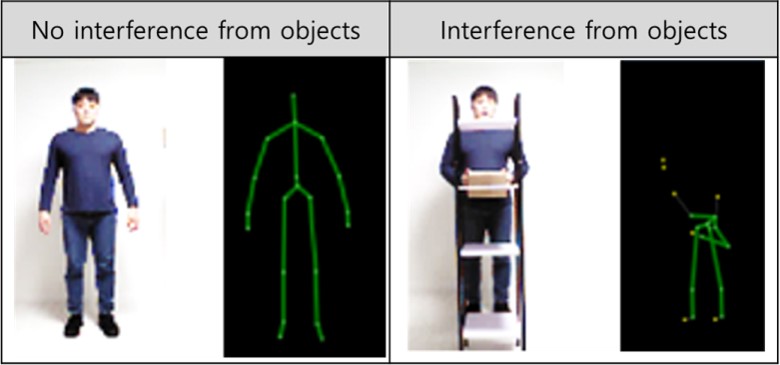
깊이 인식 카메라를 활용한 실험에서는 측정 각도에 따라 다양한 결과가 나타났다. 깊이 인식 카메라는 주로 인물의 정면에서 골격 정보를 수집할 수 있다. 0°(정면)과 45° 각도에서의 평가에서는 인물의 골격 정보를 비교적 정확히 수집할 수 있었지만, 90°, 135°, 180°(후면) 각도에서는 인물의 측면과 후면이 촬영되어 렌즈에 노출되지 않는 신체 부위가 골격 정보로 인식되지 않는 어려움이 있었다(Figure 5). 또한, 심지어 0°와 45° 각도에서도 사물의 간섭으로 인해 인물의 신체 일부가 가려질 경우 골격 정보를 완전히 수집하지 못하는 경우가 발생하였다. 이러한 문제는 90°, 135°, 180° 각도에서 더욱 두드러졌으며, 이 각도에서는 인물의 측면 및 후면이 촬영되어 정확한 골격 정보를 얻기 어려웠다(Figure 6).

각도 뿐만 아니라 측정 자세의 움직임에 따라 골격 정보 수집 결과가 상이하게 나타났다. 다섯 가지 자세 중 '물건 들어 뒤돌아 바닥에 내려 두기' 자세는 앞서 정의한 네 가지 자세와는 다르게 몸통 전체를 180° 회전하여 움직인다는 특징이 있다. 특히, 물건을 뒤돌아 바닥에 내려 두기 위해 무릎을 굽혀 앉게 되는데, 이때 깊이 인식 카메라가 모든 각도에서 골격 정보를 수집하기에 어려움이 존재하였다(Figure 7).

3.2 Results of manual evaluation
수작업 평가 결과, '아래쪽 물건 들기' 자세의 Action Level은 3, '위쪽 물건 두기' 자세의 Action Level은 1, '허리 비틀어 위쪽 물건 들기' 자세의 Action Level은 1, '허리 비틀어 아래쪽 물건 두기' 자세의 Action Level은 3, '물건 들어 뒤돌아 바닥에 내려 두기' 자세는 Action Level은 3으로 평가되었다. 동작의 가동 범위가 크거나 비틀기 작업이 크게 작용될 경우, Action Level이 높게 나타나는 것을 확인할 수 있었다.
3.3 Comparison of evaluation results
깊이 인식 카메라 및 수작업 평가의 OWAS 결과 값을 비교하고자 한다. 먼저, 깊이 인식 카메라의 결과는 골격 정보를 보다 정확하게 수집할 수 있는 상황을 선정하였다. '아래쪽 물건 들기' 자세를 45° 각도로 측정할 때, '위쪽 물건 두기 자세'를 45°로 측정할 때, '허리 비틀어 위쪽 물건 들기' 자세를 0°(정면)에서 측정할 때, '허리 비틀어 아래쪽 물건 두기' 자세를 0°(정면)에서 측정한 결과 값을 수작업 평가 결과와 비교하였다. '물건 들어 뒤돌아 바닥에 내려 두기' 자세는 앞서 말했듯이 180° 뒤돌아 있는 자세로, 깊이 인식 카메라로 정확한 측정이 불가하여 비교 대상에서 제외시켰다. 깊이 인식 카메라를 활용한 OWAS 평가 결과와 수작업 평가 결과 간에는 차이점이 있었으나, '위쪽 물건 두기' 자세와 '허리 비틀어 위쪽 물건 들기' 자세에서는 동일한 평가 결과를 나타내었다(Action Level: 1) (Table 1). 깊이 인식 카메라 결과 값과 수작업 평가 결과 값에 차이가 나는 자세에서는 깊이 인식 카메라의 특성이 나타났다. 깊이 인식 카메라는 인물의 신체를 촬영하여 골격 정보를 만들어 인물의 움직임을 파악한다. 따라서, 인물의 신체가 카메라 렌즈 시야에 존재하지 않는다면 골격 정보를 정확히 수집하기 어려우며, 사물 간의 간섭도 고려해야 한다는 점을 확인하였다.
|
Posture |
Camera angle |
Depth camera evaluation (OWAS Action level) |
Manual evaluation (OWAS Action level) |
|
Pick up the object below |
0° |
4 |
3 |
|
45° |
2 |
||
|
90° |
2 |
||
|
135° |
2 |
||
|
180° |
4 |
||
|
Place the object above |
0° |
4 |
1 |
|
45° |
1 |
||
|
90° |
2 |
||
|
135° |
2 |
||
|
180° |
1 |
||
|
(Twist at the waist) |
0° |
1 |
1 |
|
45° |
2 |
||
|
90° |
2 |
||
|
135° |
1 |
||
|
180° |
1 |
||
|
(Twist at the waist) |
0° |
4 |
3 |
|
45° |
4 |
||
|
90° |
2 |
||
|
135° |
2 |
||
|
180° |
4 |
||
|
Pick up an object, turn it over, |
0° |
Excluded from comparison because of backward position that |
|
|
45° |
|||
|
90° |
|||
|
135° |
|||
|
180° |
|||
본 연구는 깊이 인식 카메라(Kinect V1)를 활용하여 작업 자세 평가에 적절한 촬영 각도를 규명하고, 이를 산업 현장에 적용할 수 있는 방법에 대해 논의하였다. 특히, 기기를 통해 얻어진 데이터를 바탕으로 작업자의 자세를 평가하고, 3차원 가상 모델을 구성하여 작업 자세와 관련된 근골격계 위험성을 분석하는 접근법에 중점을 두었다. 본 연구는 평가자의 수작업 평가와 비교하여 깊이 인식 카메라의 활용 가능성, 장단점을 확인하는 데 초점을 두었으며, 보다 높은 정확도를 위해 적절한 카메라 위치와 각도를 정립하는 데 목적이 있다. 이 연구에서 제안된 두 가지 평가 방법은 서로의 강점과 약점이 상충하고 있는 것으로 보인다. 우선, 수작업 평가는 작업자의 신체가 사물의 간섭 등으로 가려져 있더라도 평가자가 작업의 맥락을 고려하여 신체의 주요 관절을 식별할 수 있는 이점이 있다. 그러나, 평가자가 관절의 위치를 주관적으로 결정하면서 분석이 부정확한 위치에 지정될 수 있어, 평가의 정확도가 감소할 가능성이 높다(Im et al., 2011; Chen and Jung, 2021). 깊이 인식 카메라 기반 평가는 사물의 간섭 및 특정 각도에 따라 주요 관절의 위치를 정확히 파악하기 어려운 제한이 있다. Kinect와 같은 저비용 비표식 모션 캡처 시스템은 작업 자세에서 관절의 2차원 좌표를 시각화하기 때문에, 굴곡의 정확한 차이가 없는 경우에는 식별이 어려울 수 있다. 이러한 한계를 극복하기 위해서는 직접적인 방법으로 작업자의 신체에 부착된 센서의 데이터를 수집하는 모션 캡처 시스템을 활용하여 주요 관절의 3차원 위치를 파악하는 것이 높은 정확성과 신뢰성을 제공할 수 있다. 그러나, 실제 산업 현장에서 분석하기에 비용이 더 많이 들고 많은 시간이 소요될 뿐만 아니라(Kowalski et al., 2012; Xu et al., 2015) 작업 자세를 분석하기 위해서는 장비 및 장소 등 여러 조건들이 필요하다. 본 연구에서 사용한 깊이 인식 카메라 기반 평가를 활용하면 실시간으로 수집되는 자세를 단순화된 디지털 모델로 재구성하여 근골격계 질환의 위험 정도를 파악하는데 사용할 수 있어 인체공학적 평가를 부분적으로 자동화할 수 있다는 장점이 존재하며, 디지털로 저장된 평가 결과는 작업 표준화 및 프로세스를 개선하는데 사용될 수 있다. 깊이 인식 카메라를 활용해 측정된 모션은 실시간 분석이 가능한 Virtual Human Tool로 평가되며, 이전 연구를 통하여 비접촉 시 평가 방법과 간략하게 이동이 가능한 특성상 산업 현장에서도 충분히 활용될 수 있을 것으로 판단된다(Colombo et al., 2013).
본 연구에서는 비용 효율성과 다양한 적용 가능성을 갖는 깊이 인식 카메라를 활용하여 산업 현장의 작업 상황을 분석하는 방안에 대해 논의하였다. 정확한 결과를 얻기 위해 골격 정보의 높은 정확도를 갖는 카메라 위치와 각도를 정의하여, 실제 산업 현장에서 활용을 위해, 카메라 설치에 관한 권장사항을 제시하였다.
한편 Kinect V1은 과거의 깊이 인식 카메라 모델로 Azure Kinect나 Intel RealSense와 같은 최신 기기와 비교했을 때 해상도와 인식도가 낮아 일부 기술적인 한계가 있음을 인지해야 한다. 본 연구 결과는 "Kinect V1 카메라를 사용한 결과"로 한정하여 해석해야 하며(4.1장 포함), 더 높은 성능을 제공하는 깊이 센서나 딥러닝 기반 영상 분석 기술을 도입하여 다양한 환경에서 효과적인 촬영 조건을 규명하는 추후 연구가 필요하다.
4.1 Recommendations on how to evaluate workload using the depth camera
본 연구의 결론은 다음과 같다. 첫째, 깊이 인식 카메라를 사용할 때 가능한 정면에서 작업자를 촬영하는 것이 우수한 성능을 보이는 것으로 판단된다. 다만, 산업 현장에서는 작업대가 벽에 붙어 있는 경우가 많아 정면 촬영이 어려울 수 있으며, 이 경우 측면에서 촬영해도 충분한 결과를 얻을 수 있을 것으로 기대할 수 있다. 둘째, 카메라와 작업 환경 사이의 간섭이 최소화되도록 배치하여 작업자 한 명을 확인할 수 있도록 하는 것이 더 나은 성능을 보장한다. 셋째, 작업자가 몸통을 180° 회전하는 등 특정 자세에서는 깊이 인식 카메라의 인식이 어려울 수 있으므로, 이러한 경우에는 작업 동작을 나누어 카메라 각도를 조정하거나 재배치하여 평가할 수 있다. 따라서, 깊이 인식 카메라를 활용하여 작업부하를 평가할 때에는 카메라의 촬영 각도를 조정하여 작업자가 사물에 가려지지 않도록 하고, 0°(정면)에서 45° 사이의 각도 내에서 작업 자세를 촬영하는 것이 보다 효과적인 평가 결과를 제공할 수 있다.
깊이 인식 카메라를 활용한 인간공학적 평가에 관한 여러 연구들이 진행되었으나, 기존 연구들은 주로 동일한 자세를 유지한 상태에서 작업자의 자세를 분석하는 데 중점을 두었으며, 다양한 각도에서의 작업 자세 변화나 물체가 존재하는 작업 환경에서의 자세 평가에는 한계가 있었다(Lee et al., 2014; Korea Institute of Industrial Technology, 2021). 이에 따라, 본 연구는 깊이 인식 카메라를 활용하여 다각도에서의 작업 자세 평가와 실시간 분석이 가능하도록 기존 연구들과 차별화된 접근을 시도하며, 새로운 분석 관점을 제시한다.
4.2 Difference between depth camera and manual evaluation
전문 평가자가 현장에서 수작업으로 작업부하를 평가할 때에는 현장 방문과 함께 개별 작업자의 자세 분석과 시간당 작업량 측정 등 세부적인 관찰과 기록을 수행해야 하므로, 시간과 인력이 소요되고 평가자의 피로도 역시 높아질 수 있다. 반면, 깊이 인식 카메라를 사용하면 현장 방문과 세밀한 수작업 기록에 대한 부담을 줄일 수 있다. 깊이 인식 카메라와 휴먼 시뮬레이션 소프트웨어를 활용하면 간편하게 작업부하를 자동 평가할 수 있으며, 실시간으로 결과를 확인할 수 있어 산업 현장에서 효율적이고 신속한 적용이 가능하다는 장점이 있다.
이러한 방식은 특히 반복적인 작업 환경에서 자동화된 평가 시스템을 구축할 수 있도록 하여, 작업부하 평가의 정확성과 신뢰성을 높이는 데 도움이 된다. 예를 들어, 동일한 자세를 반복적으로 측정하거나 다양한 사람을 대상으로 데이터를 수집하면 데이터의 일관성을 확보할 수 있고, 이상치 필터링을 통해 오류를 줄일 수 있다. 이를 통해 OWAS 평가 결과도 더욱 객관적이고 일관성 있게 산출될 수 있을 것이다.
다만, 본 연구의 한계로는 다양한 작업 상황에 대한 분석이 부족하다는 점이 있다. 실험에서 사용된 자세가 제한적이며, 다양한 각도와 동작을 포함한 작업에 대해서는 적용에 어려움이 있을 수 있다. 그러나 이 연구의 결과는 향후 딥러닝 기반 영상 분석 기술과 결합하여 더 넓은 범위의 작업 자세 평가와 실제 산업 현장에서 활용 가능한 가이드라인 마련에 기여할 수 있을 것이다.
References
1. Chen, W. and Jung, K., Development of Vector-based and Deep Learning-based OWAS Assessment Systems for Assessing Working Postures. Journal of the Ergonomics Society of Korea, 40(2), 75-87, 2021.
2. Colombo, G., Regazzoni, D. and Rizzi, C., Markerless motion capture integrated with human modeling for virtual ergonomics. Digital Human Modeling and Applications in Health, Safety, Ergonomics, and Risk Management. Human Body Modeling and Ergonomics: 4th International Conference, DHM 2013, Held as Part of HCI International 2013, Las Vegas, NV, USA, July 21-26, 2013, Proceedings, Part II 4. Springer Berlin Heidelberg, 2013.
Google Scholar
3. Diego-Mas, J.A. and Alcaide-Marzal, J., Using KinectTM sensor in observational methods for assessing postures at work. Applied Ergonomics, 45(4), 976-985, 2014.
Google Scholar
4. Im, S.J., Choi, S.Y. and Park, D.H., The usability analysis for ergonomic evaluation methods of work-related musculoskeletal disorders, Journal of the Korea Safety Management & Science, 13(2), 83-90, 2011.
Google Scholar
5. David, G.C., Ergonomic methods for assessing exposure to risk factors for work-related musculoskeletal disorders. Occupational Medicine, 55(3), 190-199, 2005.
Google Scholar
6. Dzeng, R.J., Hsueh, H.H. and Ho, C.W., Automated Posture Assessment for construction workers. In 2017 40th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO) (pp. 1027-1031). IEEE, 2017.
Google Scholar
7. Jeong, B.Y., Risk Factors Analysis System: Current Issues and Future Directions. Journal of the Ergonomics Society of Korea, 26(2), 123-129, 2007.
Google Scholar
8. Kim, D.S., Bae, S.D., Moon, M.G. and Kim, C.H., Criteria for classification of flexion angle for the assessments of posture by observation methods. Proceedings of the ESK Conference, 126-131, 2007.
9. Knudson, D. and Morrison, C., Qualitative analysis of human movement Human Kinetics. Champaign, IL, 2002.
10. Korea Institute of Industrial Technology. Development of working motion analysis technology using depth camera. Ministry of Science and ICT, 2021.
11. Kowalski, K., Rhodes, R., Naylor, P.J., Tuokko, H. and MacDonald, S., Direct and indirect measurement of physical activity in older adults: a systematic review of the literature. International Journal of Behavioral Nutrition and Physical Activity, 9(1), 1-21, 2012.
Google Scholar
12. Lee, I., Effects of Viewing Angle on the Estimation of Joint Angles in the 2-dimensional Plane. Journal of the Ergonomics Society of Korea, 25(2), 51-61, 2006.
Google Scholar
13. Lee, J., Han, J. and Yang, J., Depth camera-based posture discrimination and motion interpolation for real-time human simulation. Korean Journal of Computational Design and Engineering, 19(1), 68-79, 2014.
Google Scholar
14. Lunin, A. and Glock, C.H., Systematic review of Kinect-based solutions for physical risk assessment in manual materials handling in industrial and laboratory environments. Computers & Industrial Engineering, 162, 107660, 2021.
Google Scholar
15. Manghisi, V.M., Uva, A.E., Fiorentino, M., Bevilacqua, V., Trotta, G.F. and Monno, G., Real time RULA assessment using Kinect v2 sensor. Applied Ergonomics, 65, 481-491, 2017.
Google Scholar
16. Ministry of Employment and Labor, Analysis of the status of industrial accident, 2011-2018.
17. Ministry of Employment and Labor, Occupational Safety and Health Act, 2020.
18. Oh, H.S., A Basic Study of Digital Human Modeling in Shipbuilding Industry (Doctoral dissertation), 2006.
19. Park, J.H., Lee, I.S., Kee, D.H., Jung, H.S. and Park, J.K., Survey on performance of the risk assessment of musculoskeletal disorders, Journal of the Korean Society of Safety, 26(1), 49-57, 2011.
Google Scholar
20. Park, J.H. and Kwak, W., Comparison of the representative values of the sampled work scences with the expert's judgment in the MSD workload evaluation, Journal of the Ergonomics Society of Korea, 25(2), 205-210, 2006.
Google Scholar
21. Park, J., Kim, M., Jung, H., Park, C., Cui, X., Lee, S. and You, H., The Advancement Trend of Digital Human Modeling and Simulation. Journal of the Ergonomics Society of Korea, 42(5), 509-521, 2023.
22. Xu, X., McGorry, R.W., Chou, L.S., Lin, J.H. and Chang, C.C., Accuracy of the Microsoft KinectTM for measuring gait parameters during treadmill walking. Gait & Posture, 42(2), 145-151, 2005.
Google Scholar
PIDS App ServiceClick here!