eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Kyeong-Hee Choi
, Jeong-Bae Ko
, Duk-Young Jung
, Hyeri Shin
, Jae Soo Hong
10.5143/JESK.2024.43.6.485 Epub 2025 January 07
Abstract
Objective: This study aims to investigate the effect of gait-assist wearable robot on gait pattern and muscle activity in elderly individual in Korea.
Background: An aged society present significant challenges that lead to various social problems. As physical and mental abilities decline with age, proper gait becomes crucial for maintaining social relationship and activities of daily livings (ADLs). Therefore, there is an increasing need for technology to address gait-related problems.
Method: A total of 15 females (9 elderly, 6 young) were participated in this study. We asked participants to perform two tasks (14m walking and step climbing) three times each. During these tasks, gait indices (gait velocity, step time, cadence, swing cycle, stance cycle, step length, symmetric index) and muscle activity (Rectus femoris, Tibialis anterior, Gastrocnemius) were measured to quantify the effects of gait-assist wearable robot by using wireless Electromyography (EMG) device and wearable inertial sensor for gait analysis.
Results: The result of this study indicated that the gait-assist robot did not significantly affect on gait indices in young group. However, in the elderly group, the symmetry index significantly increased when elderly wore the gait-assist robot. Regarding muscle activity, the results showed a significant decrease in rectus femoris muscle activity when wearing gait-assist robot in both groups.
Conclusion: This study indicated that the effect of gait-assist wearable robot was different according to age group. In elderly group, wearing a gait-assist robot could improve the symmetric index, swing ratio of gait. However, to generalize these results, a larger sample size and a more diverse group considering age, gender, and health conditions are needed.
Application: The finding of this study may facilitate the adaption of gait-assist robots for elderly individual.
Keywords
Gait index Muscle activity Gait-assist wearable robot Elderly's gait pattern
2024년 기준 한국의 65세 이상 고령 인구는 총 990만명으로 우리나라 전체 인구의 약 19.2%를 차지하고 있으며, 2025년에는 20% 이상이 고령자인 초고령사회로 진입할 것이라고 예상되고 있다(Statistics Korea, 2024). 노인 인구가 지속적으로 증가함에 따라 독거노인 방치, 고독사 등의 노인 인권문제가 빈번하게 발생하고 있으며, 다가오는 초고령사회에 대비하여 다양한 지원 방안의 필요성이 제기되고 있다.
노화에 따라 신체적 및 정신적 기능의 저하는 자연스러운 현상이며, 이러한 변화는 고령자에게 여러 가지 제약을 가져오게 된다. 특히 보행장애는 노년기에 겪게 되는 가장 큰 어려움 중 하나로, 고령자의 삶의 질에 부정적인 영향을 미친다고 알려져 있다(Lawton and Nahemow, 1973; Lee, 2014). 뿐만 아니라 보행장애는 낙상과 사회적 고립과도 관련이 있는 예측 요인으로(Kim and Ko, 2004; Davey, 2007; Rosso et al., 2013; Park, 2017), 이를 조기에 진단하고 관리하기 위하여 대학, 연구기관, 기업 등으로부터 많은 관심을 받고 있는 주제이기도 하다.
보행이 일상적이며 자동적으로 수행되는 것 같아 보이지만 정상적인 보행을 위해서는 근력, 균형감각, 주의력, 협응 능력 등 다양한 신체적, 정신적 기능들의 조화가 필요하다(Kirkwood et al., 2006; Lee, 2011). 이러한 기능은 노화에 따른 근손실 및 신경계 퇴화, 관절 약화에 의해 저하되어(Seo, 2019), 보행의 시간적, 공간적 지표에 많은 영향을 미친다. 20대 성인과 비교했을 때, 고령자의 보폭은 37~87%까지 감소하며, 보행속도 역시 33~78%까지 감소하는 것으로 나타난다(Kim, 2017). 뿐만 아니라 보행 시 두발이 지면에 닿아있는 시간은 길어지고, 한발로 지면에 있는 시간은 짧아지면서 보다 안정된 형태를 가지게 된다(Cromwell et al., 2001).
보행장애 개선을 위해 근력운동, 노르딕 보행, 균형 훈련, 보조장치 등 다양한 대안들이 권장되고 있다. 그 중 착용형 보행보조장치가 인공지능과 로봇 기술 발전에 따라 보행장애 개선에 긍정적 기여를 할 것으로 전망되고 있다. Lee et al. (2017)은 고령자를 대상으로 착용형 로봇인 Gait-enhancing Mechatronic System(GEMS, 삼성전자)에 대한 실험연구를 수행하였으며, 로봇이 고령자의 보행속도 증가와 근활성도 감소에 긍정적인 영향을 미친다고 보고하였다. Lee et al. (2024)은 젊은 연령을 대상으로 착용형 보행보조로봇을 사용하여 걷기 과업을 수행하였으며, 로봇 착용 시 심박수와 족저압이 유의하게 감소한다고 보고하였다. Feodoroff and Blümer (2022)는 자체 개발한 착용형 보행보조로봇 착용 시 보행장애가 있는 고령자의 보폭이 유의하게 증가한다고 밝혔다. Collins et al. (2015)와 Kim et al. (2022)는 착용형 보행보조로봇이 보행 시 대사량을 유의하게 감소시켜준다고 보고한 바 있다. 이렇듯 보행보조로봇과 관련된 선행연구들은 대부분 근활성도, 에너지 효율, 보행지표를 이용하여 로봇을 평가하였으며, 긍정적인 효과가 일부 입증된 바 있다.
그러나 대부분의 기존 연구들은 자체 개발한 로봇을 사용하여 실험을 수행하였기 때문에 실제 소비자들이 해당 로봇을 직접 구매하거나 사용할 수 없다는 한계점을 지닌다. 특히 상용화 되지 않은 로봇은 일반 대중에게 접근성이 떨어지며, 연구 결과를 실생활에 적용하기 어렵다. 따라서 본 연구는 이러한 한계점을 극복하고 보다 실질적인 연구 결과를 도출하기 위해 시중에 판매되고 있는 상용 제품을 선택하여 그 효과를 분석하고자 한다. 이를 위하여 시중에 시판되고 있는 국내 W사의 착용형 보행보조로봇을 연구대상 로봇으로 선정하였다. 근활성도, 보행지표 등 보행 중 발생하는 다양한 데이터를 수집하여 해당 보행보조로봇의 성능과 효과를 평가하여 보행보조로봇이 고령자의 보행을 얼마나 개선하는지 또는 어떤 지표에 긍정적인 역할을 미치는지 명확히 하는 것이 본 연구의 목적이다.
2.1 Participants
본 연구를 위하여 보행장애가 없으며 정상체중인 건강한 여성 15명(65세 이상 고령자 9명, 65세 미만 젊은 연령 6명)을 섭외하였다. 피험자의 인체측정학 정보는 다음과 같다(Table 1). 본 연구는 경희대학교 기관 IRB (# KHGIRB-24-227-1) 승인을 받아 진행되었으며, 실험에 앞서 연구 목적, 방법 등의 사전 설명 후 피험자의 동의를 받아 진행되었다.
|
|
Age (years) |
Stature (cm) |
Weight (kg) |
|
Elderly participants |
71.3 (±5.2) |
153.1 (±4.0) |
56.1 (±5.8) |
|
Young participants |
54.0 (±10.0) |
158.3 (±8.0) |
63.7 (±7.0) |
2.2 Experimental apparatus
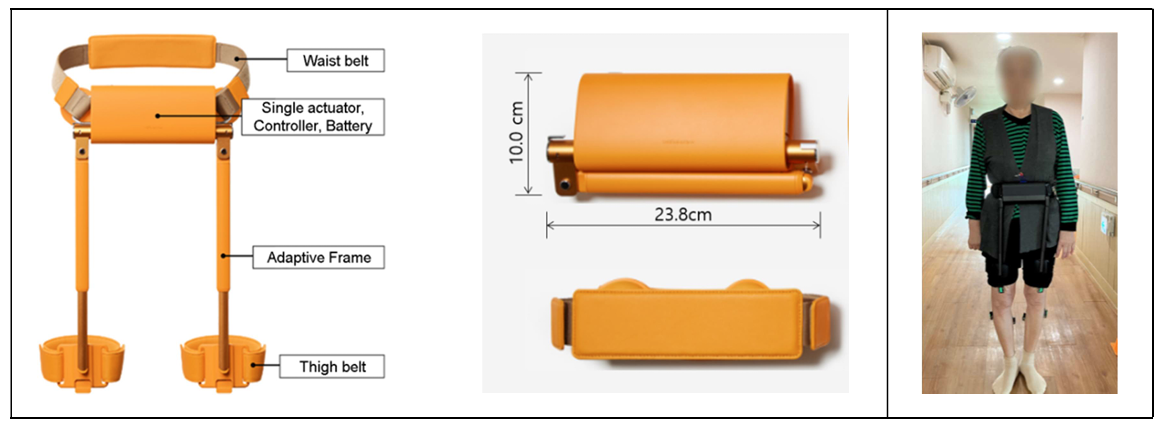
본 연구를 위하여 착용형 보행보조로봇이 사용되었다(Figure 1, Table 2). 한 개의 모터와 두 개의 프레임으로 구성되며, 피험자의 신체조건에 맞게 벨트를 조절하여 허리와 허벅지에 착용한다. 보행을 보조해주는 Assist-mode와 저항을 가하여 운동 강도를 높여주는 Exercise-mode의 두 가지 기능을 탑재하고 있으며, 본 연구에서는 Assist-mode가 사용되었다. Assist- mode는 사용자의 보행을 감지하여 적절한 토크를 발생시켜 보행 시 사용자의 고관절 움직임을 보조해주는 역할을 한다.
|
|
Weight (kg) |
Size (cm) |
Adaptive frame stroke (cm) |
|
Specifications |
1.4 |
23.8 × 10.0 × 5.0 |
1.6~3.5 |
2.3 Outcome measures
본 실험을 위해서 양쪽 대퇴직근(Rectus Femoris, RF), 비복근(Gastrocnemius, GAS), 전경골근(Tibialis Anterior, TA)의 표면 근전도가 측정되었다. 표면 근전도 측정을 위해서 무선 근활성도 측정장비인 Trigno wireless EMG system (Delsys, Natick, MA, USA)가 사용되었으며, 센서의 부착위치는 SENIAM guideline을 토대로 선정되었다. 표면 근전도 신호의 Sampling rate는 2,100Hz이며, Butterworth second-order bandpass filter (low frequency: 20Hz, high frequency: 450Hz)를 이용하여 필터링하였다. 분석을 위하여 근육별 Maximum voluntary contraction (MVC)을 토대로 정규화된 값인 % MVC가 사용되었다.
보행분석 지표 측정을 위하여 착용형 보행분석기인 G-walk (BTS Bioengineering, MI, Italy)가 사용되었다(Sampling rate: 100Hz). 해당 디바이스는 피험자의 허리 L4/L5 부근에 탄성밴드를 이용하여 착용하는 형태로, 14m 보행 중 보행속도, 보행시간, 분속수, 좌/우 입각기 유각기 비율, 활보장거리, 대칭지표를 측정하였다. 보행속도(Gait velocity)란 단위시간 동안의 보행거리를 의미하며, 보행시간이란 보행에 소요되는 시간을 의미한다. 보행분속수(cadence)란, 1분 동안의 보장수를 의미하며, 입각기, 유각기 비율이란 보행주기에서 입각기와 유각기가 각각 차지하는 비율을 의미한다. 활보장거리(stride length)는 한 발이 지면에 닿은 후, 같은 발이 다시 지면에 닿을 때까지의 거리를 의미한다. 대칭 지수란 보행 시 양쪽 발의 보행패턴이 얼마나 대칭적인지 측정하는 지표로, 보행주기 동안 좌측과 우측의 전후 가속도(Anterior-posterior) 곡선의 대칭 비율을 나타내며, 0부터 100사이의 값을 가진다. 100에 가까울수록 보행 대칭도가 높음을 의미한다(Aycardi et al., 2019).
2.4 Experimental procedures
실험에 앞서 로봇 착용에 익숙해지기 위하여 15분간의 적응시간을 제공하였다. 피험자가 편하게 보행할 수 있도록 피험자의 신체 사이즈에 맞게 피팅하였다. 근활성도 측정을 위해 좌우 각각 3개의 하지 근육(대퇴직근, 전경골근, 비복근)에 표면 근전도 센서를 부착하였으며, 데이터 정규화를 위하여 각 근육별로 MVC를 3회 반복측정 하였다. 피로 방지를 위하여 측정간 3분의 휴식시간을 제공하였으며, 최대값을 활용하여 % MVC로 정규화 하였다.
본 연구에서는 두 종류의 과업(14m 보행, 상행 계단보행) 수행하였다. 약 14m의 평지를 보행하는 과업과 1층 높이를 오르는 상향 계단보행 과업을 각각 3회씩 반복 수행하였다(Figure 2). 피로 방지를 위하여 반복간 5분간의 휴식시간을 제공하였다.

2.5 Statistical analysis
통계적 분석은 SPSS 소프트웨어(version 18, SPSS Inc., Chicago, IL, USA)를 사용하였다. 3회 반복측정 실험을 고려하여 일반화 추정방정식(Generalized estimating equation, GEE)으로 분석하였다. P-value가 0.05 미만인 경우 통계적으로 유의한 것으로 판단하였다.
3.1 Muscle activity
고령자 집단에서 로봇 착용 여부에 따라 일부 근육 근활성도의 유의한 차이가 관찰되었다(Table 3). 걷기 과업 수행 시, 우측 대퇴직근에서 로봇 착용 시 근활성도가 유의하게 감소하였다(Wald χ2 = 4.154, p=.042). 나머지 근육에서도 로봇 착용 시에 근활성도가 감소하는 경향이 나타났으나, 통계적으로 유의하지 않았다. 계단 오르기 과업에서는 우측 비복근에서 로봇 착용 시 근활성도가 유의하게 감소하였다(Wald χ2 = 8.246, p=.004).
|
|
Without robot (% MVC) |
With robot (% MVC) |
Statistical |
|
|
Mean (SE) |
Mean (SE) |
Wald χ2 (p-value) |
||
|
Walking task |
||||
|
Rectus femoris |
Right |
22.21
(3.45) |
15.61
(1.85) |
4.154 (0.042)* |
|
Left |
23.71
(6.66) |
16.79
(4.38) |
1.681 (0.195) |
|
|
Gastrocnemius |
Right |
23.84
(3.16) |
20.85
(2.63) |
1.231 (0.267) |
|
Left |
28.37
(7.48) |
24.02
(4.65) |
1.928 (0.165) |
|
|
Tibialis anterior |
Right |
21.86 (2.13) |
18.41 (2.02) |
3.212 (0.073) |
|
Left |
24.36 (1.85) |
23.32 (1.86) |
0.751 (0.386) |
|
|
Stair climbing task |
||||
|
Rectus femoris |
Right |
30.97 (5.26) |
26.19 (3.38) |
0.754 (0.385) |
|
Left |
22.69 (4.55) |
22.13 (3.65) |
0.102 (0.750) |
|
|
Gastrocnemius |
Right |
21.63 (1.81) |
17.17 (1.73) |
8.246 (0.004)** |
|
Left |
32.60 (7.79) |
16.75 (3.91) |
1.962 (0.161) |
|
|
Tibialis anterior |
Right |
26.09 (3.33) |
22.71 (1.86) |
2.300 (0.129) |
|
Left |
27.47 (2.13) |
28.42 (2.22) |
0.118 (0.731) |
|
|
*p<.05,
**p<.01, ***p<.001 |
||||
젊은 연령 집단 역시 로봇 착용 여부에 따른 근활성도의 차이는 일부 근육에서 유의하게 나타났다(Table 4). 걷기 과업 시 우측 대퇴직근에서 로봇을 착용했을 때 유의하게 근활성도가 감소했다(Wald χ2 = 4.024, p=.045). 계단 오르기 과업에서는 좌측 대퇴직근에서 로봇 착용에 따라 유의하게 근활성도가 감소하는 것으로 나타났다(Wald χ2 = 5.580, p=.018).
|
|
Without robot (% MVC) |
With robot (% MVC) |
Statistical |
|
|
Mean (SE) |
Mean (SE) |
Wald χ2 (p-value) |
||
|
Walking task |
||||
|
Rectus femoris |
Right |
25.44 (9.02) |
15.56 (4.41) |
4.024 (0.045)* |
|
Left |
19.90 (3.59) |
15.23 (1.54) |
2.210 (0.137) |
|
|
Gastrocnemius |
Right |
17.36 (1.33) |
19.46 (1.43) |
3.536 (0.060) |
|
Left |
19.96 (1.82) |
19.61 (3.92) |
0.022 (0.882) |
|
|
Tibialis anterior |
Right |
17.9 (1.88) |
19.02 (3.94) |
0.224 (0.636) |
|
Left |
23.24 (4.00) |
26.41 (5.87) |
1.681 (0.195) |
|
|
Stair climbing task |
||||
|
Rectus femoris |
Right |
27.19 (3.96) |
24.42 (3.37) |
2.887 (0.089) |
|
Left |
23.77 (3.16) |
16.10 (1.29) |
5.580 (0.018)* |
|
|
Gastrocnemius |
Right |
21.07 (2.03) |
19.46 (2.79) |
2.285 (0.131) |
|
Left |
20.95 (1.45) |
20.76 (2.36) |
0.005 (0.946) |
|
|
Tibialis anterior |
Right |
20.32 (3.58) |
17.75 (2.67) |
1.817 (0.178) |
|
Left |
24.44 (5.13) |
20.84 (2.85) |
1.849 (0.174) |
|
|
*p<.05, **p<.01, ***p<.001 |
||||
3.2 Gait parameters
고령자의 보행분석 결과, 14m 걷기 과업 수행 시 로봇 착용에 따라 좌측 입각기와 유각기의 비율(Wald χ2 = 4.241, p=.039), 우측 입각기와 유각기 비율(Wald χ2 = 3.772, p=.052), 보행 대칭도(Wald χ2 = 6.024, p=.014)에서 유의한 차이가 나타났다. 양측 모두 로봇 착용 시 유각기의 비율이 유의하게 증가하였으며, 보행 대칭도는 로봇 착용 시 유의하게 증가하였다(Table 5).
|
|
Without robot |
With robot |
Statistical significance |
|
Mean (standard error) |
Mean (standard error) |
Wald χ2 (p-value) |
|
|
Temporal variables |
|||
|
Gait velocity [m/s] |
1.16 (0.07) |
1.15 (0.08) |
0.131 (0.717) |
|
Walk duration [s] |
17.89 (2.34) |
16.75 (0.78) |
0.450 (0.502) |
|
Cadence [step/min] |
125.24 (2.09) |
124.78 (2.12) |
0.036 (0.849) |
|
Left swing of cycle [%] |
37.74 (1.43) |
39.10 (1.52) |
4.241 (0.039)* |
|
Left stance of cycle [%] |
62.26 (1.43) |
60.90 (1.52) |
|
|
Right swing of cycle [%] |
38.58 (0.82) |
40.57 (0.45) |
3.772 (0.052)* |
|
Right stance of cycle [%] |
61.42 (0.82) |
59.43 (0.43) |
|
|
Spatial variables |
|||
|
Stride length [m] |
1.24 (0.02) |
1.29 (0.03) |
3.148 (0.076) |
|
Symmetric index [%] |
89.59 (2.05) |
94.03 (1.89) |
6.024 (0.014)* |
|
*p<.05, **p<.01, ***p<.001 |
|||
젊은 연령층의 보행분석 결과, 모든 보행분석 지표에서 로봇착용 여부에 따른 통계적인 차이는 없는 것으로 나타났다(Table 6).
|
Gait analysis |
Without robot |
With robot |
Statistical significance |
|
Mean (standard error) |
Mean (standard error) |
Wald χ2 (p-value) |
|
|
Temporal variables |
|||
|
Gait velocity [m/s] |
1.25 (0.04) |
1.26 (0.05) |
0.135 (0.714) |
|
Walk duration [s] |
18.38 (0.75) |
19.10 (1.65) |
0.120 (0.729) |
|
Cadence [step/min] |
117.88 (1.82) |
119.98 (1.84) |
0.541 (0.462) |
|
Left swing of cycle [%] |
41.20 (0.47) |
41.12 (0.75) |
0.017 (0.896) |
|
Left stance of cycle [%] |
58.80 (0.47) |
58.88 (0.75) |
|
|
Right swing of cycle [%] |
40.13 (1.22) |
40.55 (0.68) |
0.234 (0.629) |
|
Right stance of cycle [%] |
59.87 (1.22) |
59.45 (0.68) |
|
|
Spatial variables |
|||
|
Stride length [m] |
1.29 (0.05) |
1.31 (0.06) |
1.275 (0.259) |
|
Symmetric index |
96.85 (0.5) |
96.61 (0.52) |
0.129 (0.716) |
|
*p<.05, **p<.01, ***p<.001 |
|||
보행의 제한은 개인의 독립적 생활에 부정적인 영향을 미치며 삶의 질을 저하시킨다. 특히 고령자의 경우, 신체 기능의 저하로 원활한 보행이 어려우며, 낙상 위험의 증가로 인해 자유로운 보행의 제한이 가중된다. 이를 위하여 보행보조를 위한 착용형 로봇이 활발히 개발 중에 있다. 이에 보행보조로봇의 정량적 효과를 명확히 증명하고자 하는 것이 본 연구의 목적으로, 시판되고 있는 착용형 보행보조로봇을 대상으로 고령자와 젊은 집단에 대하여 두 종류의 보행 과업(14m 보행, 계단 오르기)을 수행하였으며, 착용에 따른 근활성도, 보행지표의 변화를 분석하였다.
4.1 Muscle activity
보행보조로봇이 보행 시 사용자의 근육활성도에 미치는 영향을 파악하고자 양측 대퇴직근, 비복근, 전경골근의 근활성도를 측정하였다. 그 결과 두 집단 모두 로봇 착용 시 일부 근육에 대하여 유의한 근활성도의 감소가 관찰되었다. 고령자의 경우, 계단 오르기와 평지 보행에 대하여 대부분의 근육의 근활성도가 로봇 착용 시 감소하는 경향이 발견되었으나, 우측 대퇴직근과 비복근에서만 그 차이가 유의한 것으로 나타났다. 걷기 과업에서 우측 대퇴직근의 근활성도는 미착용 시(22.2% MVC) 대비 착용 시 15.6% MVC로 약 29.7% 유의하게 감소하였다. 계단 오르기 과업에서는 우측 비복근의 근활성도가 미착용 시(21.6% MVC) 대비 착용 시(17.2% MVC) 약 20.4% 감소하는 것으로 나타났다. 젊은 집단에서도 유사한 결과가 도출되었다. 걷기 과업 수행 시 우측 대퇴직근의 근활성도가 로봇을 착용하는 경우 15.6% MVC로 미착용 시(25.4% MVC) 대비 약 38.6%가 유의하게 감소하는 것으로 나타났으며, 계단 오르기 과업에서는 좌측 대퇴직근의 근활성도는 착용 시 16.1%로 미착용 시(23.8%) 대비 약 32.4%가 감소하는 것으로 나타났다.
대퇴직근은 고관절 굴곡과 무릎 신전에 관여하는 근육으로(Annaswamy et al., 1999), 보행 시 다리를 올려 앞으로 뻗는 역할과 말기 유각기에 무릎을 신전시켜 전방으로 발을 내딛을 수 있게 도와준다. 따라서 본 연구에서 관찰된 대퇴직근 활성도의 유의한 감소는 보행보조로봇에서 생성되는 토크가 고관절의 전방 거동을 효과적으로 보조하였다고 해석해볼 수 있다. 비복근 역시 보행 시 질량중심점을 유지하고, 안정성을 유지할 수 있는 근력을 발생시키는 중요한 근육이다(Youm and Kim, 2012). 본 연구에서 보행보조로봇 착용 시 비복근 근활성도의 유의한 감소가 관찰되었으며 이는 보행보조로봇이 보행 시 소모되는 하지 근육의 에너지를 절약하고, 비복근의 근피로도 감소에 긍정적인 역할을 수행한다고 해석해볼 수 있을 것이다. 뿐만 아니라 보행 시의 근활성도는 에너지 소비량과 높은 상관관계가 있기 때문에(Franz and Kram, 2012; Hortobágyi et al., 2011; Silder et al., 2012), 착용형 보행보조로봇 착용 시 관찰된 하지 근활성도의 유의한 감소는 보행 시 에너지 소비량 감소에도 긍정적인 기여를 했을 것이라고 간접적으로 추측해볼 수 있을 것이다.
일반적으로 착용형 로봇은 특정 근육 또는 움직임을 보조해주는 역할을 하지만, 이 과정에서 로봇의 하중, 사용자의 부적응 또는 보행 메커니즘의 변화 등의 요인이 오히려 일부 신체부위의 부담을 가중시킬 가능성도 존재한다. 본 연구에서는 로봇 착용에 따른 근활성도의 유의한 증가가 관찰되지 않았으며 이는 해당 로봇이 발생시키는 기계적인 에너지와 무게로 인한 하중이 적어도 하지 근육에는 부담을 야기시키지 않음을 의미한다.
4.2 Gait parameters
본 연구에서는 로봇착용으로 인한 보행패턴의 변화를 살펴보기 위하여 14m 평지 보행 시의 보행속도, 보장시간, 분속수, 입각기, 유각기 사이클, 보폭, Symmetric index를 살펴보았다. 그 결과 젊은 연령에서는 로봇 착용에 따른 통계적 차이가 관찰되지 않은 반면, 고령자 집단에서는 몇몇 지표에서 유의한 변화가 관찰되었다.
고령자들은 동적 균형을 유지하기 위하여 보행속도 감소, 걸음 길이와 활보 길이의 감소, 입각기 비율의 증가, 분속수의 감소 등의 전략으로 안정성을 확보한다(Prince et al., 1997; Guralnik et al., 2000; Park et al., 2018). 보행은 발이 지면과 접촉하는 입각기와 발이 공중에서 앞으로 전진하는 유각기로 구성되는데 고령자들은 보행 안정성을 확보하기 위하여 두 발을 지면에 딛고 있는 시간을 증가시키고 한 다리로만 지면을 딛고 있는 시간을 감소시킨다. 따라서 노화에 따른 입각기의 증가는 보행 시 손상된 균형에 반응하기 위한 고령자의 주요 특징이자, 낙상에 대한 두려움을 나타내는 전형적 지표라고 할 수 있다(Chamberlin et al., 2005; Kimura et al., 2007).
본 연구에서 로봇 착용에 따라 고령자 집단의 유각기가 유의하게 증가하고, 입각기가 감소하였다. 착용전 고령자의 입각기와 유각기 비율은 좌측과 우측이 각각 62.3 : 37.7, 61.4 : 38.6이었으나 로봇 착용 후 60.9 : 39.1, 59.4 : 40.6로 유의하게 변화하였다. 로봇 착용 후의 유각기 비율이 상대적으로 증가하여 보행장애가 없는 건강한 사람의 입각기와 유각기의 비율인 60 : 40 (Trew and Everett, 2010; Holt et al., 2006; Anwary et al., 2018)과 매우 근접해지는 것을 관찰할 수 있다. 고령자의 고관절 굴곡근의 약화는 유각기 감소의 원인 중 하나로(Afiah et al., 2016), 보행보조로봇에 의해서 발생하는 전방 토크가 고관절의 관절 가동범위를 늘리고 굴곡을 보조해 줌으로서 유각기가 유의하게 증가했을 것이라고 사료된다.
뿐만 아니라 착용형 보행보조로봇이 고령자의 동적 안정성에도 긍정적인 역할을 했다고 사료된다. 보행보조로봇 착용으로 인한 입각기와 유각기 비율의 차이를 보인 관련 연구는 보고된 바 없으나, 인솔 또는 신발을 연구했던 사례에서 유각기를 증가시켜주는 제품이 더 좋은 안정성을 보장하는 형태라고 보고된 바 있다. Seo (2019)는 인솔 사용 여부에 따른 고령자의 보행패턴을 분석하였으며, 인솔 사용 시 유각기가 유의하게 증가하였기 때문에 인솔이 동적 안정성 증가에 긍정적 역할을 하였다고 발표하였다. Lee et al. (2007)은 뒤축이 있는 신발인 로퍼와 뒤축이 없는 신발인 뮬과 슬리퍼를 신었을 때 고령자의 보행패턴을 분석하였으며, 로퍼의 유각기 비율이 가장 높았기 때문에 로퍼가 가장 안정성이 높은 신발의 형태라고 보고한 바 있다.
보행대칭지표(gait symmetry index) 역시 젊은 연령은 착용 여부에 따라 통계적인 차이가 발견되지 않았으나, 고령자의 경우 로봇 미착용 시(89.6%) 대비 로봇 착용 시(94.0%) 대칭 지표가 유의하게 증가하는 것으로 나타났다. 보행대칭지표란, 보행주기 동안 좌측과 우측의 전후 가속도(Anterior-posterior) 곡선의 대칭 비율을 나타내며, 0부터 100사이의 값을 가진다. 100에 가까울수록 보행 대칭도가 높음을 의미하며(Aycardi et al., 2019), 보행대칭지표 역시 노화에 따라 감소하는 것으로 알려져 있다(Moe-Nilssen and Helbostad, 2005; Kobsar et al., 2014). Kobayashi et al. (2014)는 Anteroposterior acceleration을 이용하여 보행 대칭성 지표를 평가하였으며, 연령에 따라 보행 대칭도가 유의하게 감소하는 것으로 나타났다. 고령자의 경우, 남성과 여성의 평균 보행 대칭도는 각각 0.81, 0.86였으며, 젊은 연령의 경우 남녀 모두 0.89의 값을 나타냈다. 보행이 대칭에 가까울수록 보행속도 향상, 보행 효율, 균형 조절에 용이할 뿐만 아니라 보행 시 넘어짐을 감소시키는 등 전반적인 보행의 질이 향상된다고 알려져 있다(Lewek and Randall, 2011). 보행보조기를 활용한 관련 연구를 살펴보면, 지팡이 사용이 보행대칭지표를 향상시킬 수 있으며, 그 원인으로는 지팡이 사용으로 인한 사용자의 자신감 향상, 안정성 확보, 효과적인 체중부하라고 하였다(Joyce and Kirby, 1991; Tinetti and Powell, 1993; Laufer, 2003). 본 연구에서 사용된 보행보조로봇 역시 보행 효율 및 안정성 등에 긍정적인 영향을 미쳤기 때문에 보행대칭지표가 유의하게 향상된 것이라고 해석해볼 수 있겠다.
본 연구에서는 착용형 보행보조로봇의 효과를 근활성도와 보행지표를 이용하여 분석하였다. 근육활성도의 경우, 고령자 집단과 젊은 연령 집단 모두에게서 보행보조로봇 착용 시 유의하게 대퇴직근의 근활성도가 감소하는 경향이 나타났다. 이는 해당 보조로봇이 발생시키는 기계적 토크가 고관절 굴곡을 용이하게 도와 하지 근육이 해야 할 일을 줄여 전반적인 보행 효율성을 높인다고 해석해 볼 수 있다. 보행지표의 경우, 젊은 연령 집단에서는 착용에 따른 효과가 발견되지 않았으나, 고령자는 착용에 따라 좌우 보행대칭지표가 유의하게 향상되었으며, 유각기 비율이 증가하였다. 이는 보행보조로봇이 고령자의 보행 안정성을 확보하고 약화된 근육을 보조하여 정상인의 보행에 근접할 수 있도록 보조해주는 역할을 효과적으로 수행한다고 해석해볼 수 있겠다. 이러한 정량적 분석은 보행보조로봇 개발에 있어 과학적 근거를 제공하고 향후 개선 방향을 제시하는데 중요한 기초 자료가 될 것이라고 사료된다.
그러나 본 연구에는 몇 가지 한계점이 있다. 첫 번째 한계점으로, 본 연구는 여성만을 대상으로 수행되었기 때문에 본 연구의 결론이 남성에게 동일하게 적용되지 않을 가능성이 있다는 점이다. 성별에 따른 신체적 차이로 인해 같은 로봇이라고 하더라도 남성과 여성에게 미치는 효과는 다를 수 있기 때문에 향후 남성에 대한 연구가 추가적으로 필요할 것이라고 사료된다. 두 번째 한계점으로는 본 연구에서 정의한 두 집단(고령자, 젊은 연령)간의 구분이 비교적 단순하다는 점이다. 우리나라 노인복지법에서 고령자를 65세 이상으로 정의하고 있기 때문에, 이를 기준으로 고령자 집단(평균: 71.3세)과 젊은 연령 집단(평균: 54.0세)으로 구분하였다. 그러나 65세를 기준으로 두 집단을 구분하는 것은 실제로 젊은 연령 또는 고령자의 특성을 대표한다고 보기에는 다소 넓은 범위일 수 있다. 동일한 연령이라고 할지라도 신체적 기능이나 인지적 기능에 뚜렷한 차이가 있을 수 있으며, 따라서 이들간 차이를 고려하지 않은 채 연령만을 기준으로 두 집단으로 분류하여 분석한 것은 한계점이 될 수 있으리라 사료된다. 따라서 향후 연구에서는 고령자 또는 젊은 연령대를 보다 세분화하고, 연령뿐만 아니라 신체적, 정신적 기능의 차이를 고려하는 등 보다 확장된 표본을 확보하여 연구의 범위와 신뢰성을 높일 필요가 있다고 사료된다.
세 번째 한계점으로는, 본 연구가 비교적 짧은 시간의 데이터만을 수집 및 분석하였다는 점이다. 14m 보행에 대한 한정적인 데이터를 수집 및 분석했으며, 피험자가 로봇에 적응할 수 있도록 제공된 시간도 15분으로 비교적 짧다. 긴 기간 동안 로봇을 경험하면서 로봇의 기능에 더욱 익숙해지고, 개인에게 맞는 설정을 스스로 찾아 나간다면 해당 로봇의 보행보조 효과는 더욱 명확하게 나타날 가능성이 있다. 따라서 향후 보다 장기적인 관점에서의 추가연구가 필요할 것으로 판단된다.
References
1. Afiah, I.N., Nakashima, H., Loh, P.Y. and Muraki, S., An exploratory investigation of changes in gait parameters with age in elderly Japanese women. Springerplus, 5, 1-14, 2016.
Google Scholar
2. Annaswamy, T.M., Giddings, C.J., Della Croce, U. and Kerrigan, D.C., Rectus femoris: its role in normal gait. Archives of Physical Medicine and Rehabilitation, 80(8), 930-934, 1999.
Google Scholar
3. Anwary, A.R., Yu, H. and Vassallo, M., An automatic gait feature extraction method for identifying gait asymmetry using wearable sensors. Sensors, 18(2), 676, 2018.
Google Scholar
4. Aycardi, L.F., Cifuentes, C.A., Múnera, M., Bayón, C., Ramírez, O., Lerma, S. and Rocon, E., Evaluation of biomechanical gait parameters of patients with Cerebral Palsy at three different levels of gait assistance using the CPWalker. Journal of Neuroengineering and Rehabilitation, 16, 1-9, 2019.
Google Scholar
5. Chamberlin, M.E., Fulwider, B.D., Sanders, S.L. and Medeiros, J.M., Does fear of falling influence spatial and temporal gait parameters in elderly persons beyond changes associated with normal aging?, Journals of Gerontology Series A Biological Sciences and Medical Sciences, 60, 1163-1167, 2005.
Google Scholar
6. Collins, S.H., Wiggin, M.B. and Sawicki, G.S., Reducing the energy cost of human walking using an unpowered exoskeleton, Nature, 522(7555), 212-215, 2015.
Google Scholar
7. Cromwell, R.L., Newton, R.A., Grisso, J.A. and Edwards, W.F., Relationship between select balance measures and a gait stability ratio in individuals who are known fallers. Paper presented at the Control of Posture and Gait. Maastricht, The Netherlands, 2001.
8. Davey, J.A., Older people and transport: coping without a car, Ageing & Society, 27(1), 49-65, 2007.
Google Scholar
9. Feodoroff, B. and Blümer, V., Unilateral non-electric assistive walking device helps neurological and orthopedic patients to improve gait patterns. Gait & Posture, 92, 294-301, 2022.
Google Scholar
10. Franz, J.R. and Kram, R., The effects of grade and speed on leg muscle activations during walking. Gait & Posture, 35(1), 143-147, 2012.
Google Scholar
11. Guralnik, J.M., Ferrucci, L., Pieper, C.F., Leveille, S.G., Markides, K.S., Ostir, G.V. and Wallace, R.B., Lower extremity function and subsequent disability: consistency across studies, predictive models, and value of gait speed alone compared with the short physical performance battery. The Journals of Gerontology Series A: Biological Sciences and Medical Sciences, 55(4), M221-M231, 2000.
Google Scholar
12. Holt, K.G., Saltzman, E., Ho, C.L., Kubo, M. and Ulrich, B.D., Discovery of the pendulum and spring dynamics in the early stages of walking. Journal of Motor Behavior, 38(3), 206-218, 2006.
Google Scholar
13. Hortobágyi, T., Finch, A., Solnik, S., Rider, P. and DeVita, P., Association between muscle activation and metabolic cost of walking in young and old adults. Journals of Gerontology Series A: Biomedical Sciences and Medical Sciences, 66(5), 541-547, 2011.
Google Scholar
14. Joyce, B.M. and Kirby, R.L., Canes, crutches and walkers. American Family Physician, 43, 535-542, 1991.
Google Scholar
15. Kim, J., Quinlivan, B.T., Deprey, L.A., Arumukhom Revi, D., Eckert-Erdheim, A., Murphy, P. and Walsh, C.J., Reducing the energy cost of walking with low assistance levels through optimized hip flexion assistance from a soft exosuit. Scientific Reports, 12(1), 11004, 2022.
Google Scholar
16. Kim, M., Development of senior-friendly products for the walking assistance in the elderly, Journal of the Institute of Electronics and Information Engineers, 44(1), 38-43, 2017.
17. Kim, S.H. and Ko, S.J., A study on the characteristics of the elderly with disability by disability type, Journal of the Korea Gerontological Society, 24(3), 171-195, 2004.
18. Kimura, T., Kobayashi, H., Nakayama, E. and Hanaoka, M., Effects of aging on gait patterns in the healthy elderly. Anthropological Science, 115(1), 67-72, 2007.
Google Scholar
19. Kirkwood, R.N., Araújo, P.A. and DIAS, C.S., Gait biomechanics in elderly fallers and non fallers: a literature review. Revista Brasileira de Ciencia e Movunebti, 14(4), 103-110, 2006.
20. Kobayashi, H., Kakihana, W. and Kimura, T., Combined effects of age and gender on gait symmetry and regularity assessed by autocorrelation of trunk acceleration. Journal of Neuroengineering and Rehabilitation, 11, 1-6, 2014.
Google Scholar
21. Kobsar, D., Olson, C., Paranjape, R., Hadjistavropoulos, T. and Barden, J.M., Evaluation of age-related differences in the stride-to-stride fluctuations, regularity and symmetry of gait using a waist-mounted tri-axial accelerometer. Gait & Posture, 39(1), 553-557, 2014.
Google Scholar
22. Laufer, Y., The effect of walking aids on balance and weight-bearing patterns of patients with hemiparesis in various stance positions. Physical Theraphy, 83, 112-122, 2003.
Google Scholar
23. Lawton, M.P. and Nahemow, L., Ecology and the aging process. In C. Eisdorfer and M. P. Lawton (Eds.), The psychology of adult development and aging. American Psychological Association, Washington, DC, 619-674, 1973.
Google Scholar
24. Lee, D.K., Gait Disorders, Korean Journal of Clinical Geriatrics, 12(4), 141-148, 2011.
Google Scholar
25. Lee, H.J., Lee, S., Chang, W.H., Seo, K., Shim, Y., Choi, B.O., Ryu, G.H. and Kim, Y.H., A wearable hip assist robot can improve gait function and cardiopulmonary metabolic efficiency in elderly adults, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 25(9), 1549-1557, 2017.
Google Scholar
26. Lee, S.J., Walking aid for elderly, Journal of Korean Society for Prosthetics and Orthotics, 8(1), 37-42, 2014.
27. Lee, S.M., Lee, S.H., Hong, Y. and Park, J., The Effect of Ergonomic Fit on Walking Performance of a Gait-Assist Wearable Robot. In International Textile and Apparel Association Annual Conference Proceedings (Vol. 80, No. 1). Iowa State University Digital Press, 2024.
Google Scholar
28. Lee, Y.K., Bae, S.S. and Han, J.T., The effect of footwear on gait in older adults, Journal of the Korean Society of Physical Medicine, 2(2), 161-171, 2007.
Google Scholar
29. Lewek, M.D. and Randall, E.P., Reliability of spatiotemporal asymmetry during overground walking for individuals following chronic stroke. Journal of Neurologic Physical Therapy, 35(3), 116-121, 2011.
Google Scholar
30. Moe-Nilssen, R. and Helbostad, J.L., Interstride trunk acceleration variability but not step width variability can differentiate between fit and frail older adults. Gait & Posture, 21(2), 164-170, 2005.
Google Scholar
31. Park, K.W., Gait disturbances in elderly life, Journal of the Korean Neurological Association, 35(4), 10-15, 2017.
Google Scholar
32. Park, Y.S., Kim, J.W., Kwon, Y. and Kwon, M.S., Effect of age and sex on gait characteristics in the Korean elderly people. Iranian Journal of Public Health, 47(5), 666, 2018.
Google Scholar
33. Prince, F., Corriveau, H., Hébert, R. and Winter, D.A., Gait in the elderly. Gait & Posture, 5(2), 128-135, 1997.
Google Scholar
34. Rosso, A.L., Taylor, J.A., Tabb, L.P. and Michael, Y.L., Mobility, disability, and social engagement in older adults, Journal of Aging and Health, 25(4), 617-637, 2013.
Google Scholar
35. Seo, D.K., Effects of functional insole on walking in the elderly, Journal of Korea Academia-Industrial Cooperation Society, 20(12), 280-286, 2019.
Google Scholar
36. Silder, A., Besier, T. and Delp, S.L., Predicting the metabolic cost of incline walking from muscle activity and walking mechanics. Journal of Biomechanics, 45(10), 1842-1849, 2012.
Google Scholar
37. Statistics Korea, Population projections for Korea: 2022~2072, 2024.
38. Tinetti, M.E. and Powell, L., Fear of falling and low self-efficacy: a case of dependence in elderly persons. Journal of Gerontology, 48, 35-38, 1993.
Google Scholar
39. Trew, M. and Everett, T., Human Movement. (6th ed.) Churchill Livingstone An Introductory Text, New York, 2010.
Google Scholar
40. Youm, C.H. and Kim, T.H., Effects of Induced Fatigue of Ankle Joint Muscle on the Capability and Recovery of Postural Control during Single-Leg Stance, Korean Journal of Sport Biomechanics, 22(2), 219-228, 2012.
Google Scholar
PIDS App ServiceClick here!