eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Insoo Kim
, Sooin Park
, Min-Tae Seo
, Choungkeun Lee
, Kyungran Kim
, Jae Seung Noh
10.5143/JESK.2024.43.6.589 Epub 2025 January 07
Abstract
Objective: This study implemented an IoT-based Variable Message Sign (VMS) system to provide driving information notifications for agricultural machinery, aiming to prevent traffic accidents related to such equipment. To analyze its effectiveness, changes in the speed of general vehicles and drivers' perceived traffic safety levels were examined before and after the system's installation.
Background: With the expansion of urban-rural complex areas and the increasing use of mobile agricultural machinery, traffic accidents involving general vehicles and agricultural equipment have become more frequent. Rural roads often feature traffic safety blind spots, such as curves and hilly sections, where drivers have limited visibility, necessitating new measures to prevent accidents. To address this issue, this study developed VMS technology to notify vehicle drivers of agricultural machinery driving information.
Method: In this study, a VMS system for notifying agricultural machinery driving information was implemented and installed on two rural roads identified as high-risk for traffic accidents. To evaluate the system's effectiveness, the driving speeds of general vehicles were compared before and after the system's installation. Additionally, a survey was conducted with both agricultural machinery operators and general vehicle drivers to assess their perceived traffic safety.
Results: A comparative analysis of general vehicle driving speeds in the two regions where the agricultural machinery driving notification system was installed showed an average speed reduction of 5.5% and 7.7%, respectively (p < .0001). Additionally, a post-installation traffic safety awareness survey showed that both agricultural machinery operators and general vehicle drivers' traffic safety awareness increased and their psychological burden regarding traffic accident risks decreased. These findings indicate that the system had highly positive effects for both agricultural machinery operators and general vehicle drivers.
Conclusion: This study results demonstrate that the IoT-based VMS system for agricultural machinery driving information notifications effectively reduces the driving speed of general vehicles, thereby decreasing the likelihood of accidents involving agricultural machinery. Additionally, the system significantly improved traffic safety awareness among both general vehicle and agricultural machinery drivers, while reducing their psychological burden regarding accident risks. These findings suggest that this system can serve as an efficient solution for enhancing traffic safety on rural roads.
Application: The IoT-based VMS system developed in this study for notifying agricultural machinery driving information has proven effective in preventing traffic accidents. These results highlight its potential to serve as a foundational technology for future widespread implementation and dissemination.
Keywords
Internet of things Variable message signs Traffic accident prevention Agricultural machinery Rural roads
최근 농업은 트랙터, 콤바인의 기계화를 통해 생산성 증대되었으나, 도농복합지역(Urban-rural complex area)확장으로 인해 도로를 주행하는 농업기계 사용이 증가하며 일반 차량과의 교통사고 빈도가 높아지고 있다(Kim et al., 2018; Kim et al., 2022; Kim et al., 2023). 최근 5년간(2018~2022년)의 농업기계 관련 교통사고 통계에 따르면, 연평균 사고 건수와 사망자는 799건, 945명에 이른다. 연평균 치사율이 13.0%로 전체 교통사고 치사율 1.5% 대비 8.7배 높은 것으로 조사되었다(KoROAD, 2023). 미국에서도 농업기계와 일반 자동차 간의 교통사고는 심각한 문제로 인식하고 있으며, 특히 주거지와 작업장(예. 노지, 재배지 등) 사이의 공공도로(Public roads) 및 농로(Rural roads)에서 농업기계와 차량 간의 교통사고가 증가하고 있는 것으로 보고되었다(Dimitrovski, 2013; Bernik and Jerončič, 2008). 독일에서는 주행형 트랙터 관련 교통사고의 경우 피해자의 심각성이 다른 일반 교통사고 대비 심각성이 더 크고, 사망자와 중상을 입은 비율이 평균보다 높은 것으로 보고되었다(Behl et al., 2011). 이와 같이 농업기계 관련 교통사고는 전세계 연구자에게 우려가 되는 부분으로 안전확보가 강조되고 있는 현실이다(Arnal et al., 2017).
농업기계 관련 교통사고의 예방을 위해서는 농업기계 운전자의 안전한 운행도 중요하지만 농촌 지역의 도로를 지나는 차량의 운전자의 주의가 요구된다. 농촌 지역의 도로는 곡선 및 언덕 구간이 많고, 풀 및 나무 등으로 인해 운전자의 시야확보가 어려운 교통안전사각지대가 많고(Kim et al., 2018), 농촌 지역 도로 특성에 적합하지 못한 도로안전시설, 교통안전시설 등 교통 시스템이 원인이 될 수 있다(Kim and Hwang, 2017). 특히 도로를 주행하는 트랙터, 경운기의 경우 차량과의 교통사고 발생 시 중상 및 사망률이 매우 높고, 농업기계의 대형화로 인해 넓은 후미 폭으로 일반 차량과 추돌 및 충돌할 때 차량 운전자의 심각한 피해와 부상을 초래할 수 있다(Karimi and Faghri, 2021). 이러한 농업기계 관련 교통사고 예방을 위해 농업기계 후면에 저속 차량 후부 표지, 안전반사판을 부착하거나(Choi et al., 2017), 등화 장치(예. 경광등)를 설치하는 등의 방법을 적용하고 있으나 시야확보가 어려운 도로에서는 사고예방에 한계가 있다.
이러한 문제를 해결하기 위해 Kim et al. (2018)은 우리나라 농촌 지역 도로 특성에 적합한 사물인터넷(Internet of things, IoT) 기반 농업기계 교통사고 예방 시스템을 제안하였다. 이 연구에서는 도로 주변에 설치된 도로전광표지(Variable message sign, VMS)에 농업기계가 접근하면 주행 정보를 VMS에 제공하여 차량 운전자의 주의 및 감속 운전을 유도하는 기술이다. 이와 같이 VMS를 활용한 기술은 교통안전 분야에서 도로 안전성을 향상시키는데 효과적이다(Chatterjee and McDonald, 2004; Basso et al., 2021). Sui and Young (2014)의 연구에 따르면 VMS에 경고 메시지를 제공할 경우 차량 운전자의 주행 속도를 8km/h에서 32km/h까지 저감 효과가 있는 것으로 나타났다. 또한 Hong (2022)의 VMS 형태의 스마트 교통안전 시스템의 만족도 분석연구에서 교통사고 안전 향상, 차량 속도 감소, 추돌 위험 감소 등 교통안전시설 시스템의 설치로 인해 교통사고 방지에 도움이 되는 것으로 인식하는 것으로 조사되었다(Hong et al., 2022). 이에 본 연구에서는 Kim et al. (2018)이 제안한 VMS를 활용한 IoT 기반의 농업기계 주행 정보 알림 시스템은 농업기계 관련 교통사고 예방에 효과적일 것으로 판단되어 기존 연구에 기초하여 기술을 구현하였고, 농촌 지역 도로에 설치하여 일반 주행 차량의 속도 변화와 운전자가 느끼는 교통안전 체감 효과를 평가하였다.
2.1 Preliminary review
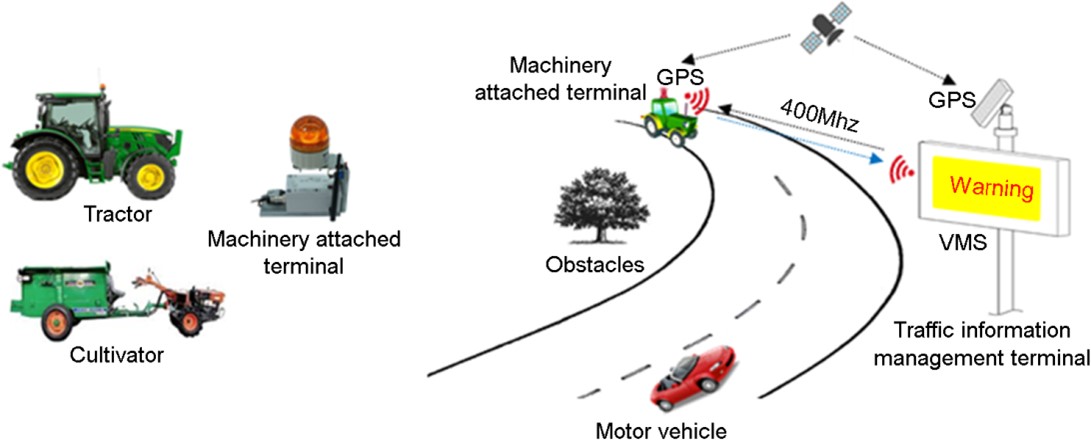
본 연구에 사용된 IoT 기술은 M2M (Machine to Machine)을 통해 단말기, 서버, 통신 네트워크 간에 자율적으로 정보를 공유할 수 있는 기술이다. 많은 교통관련 연구에서 통신 및 인터넷 등 ICT (Information & communication technology) 기술과의 접목하여 교통 안전성과 편의성 향상, 주행 효율성 등 지능형 교통 체계(Intelligent transport systems, ITS) 서비스에 적용되고 있다(Orey et al., 2014). 대부분 연구는 차량의 차선 이탈 방지, 주행 중 충돌 경보 및 회피 시스템, 운행 시 속도 보조 시스템, 교통사고 예방 및 사고 탐지 시스템 등 등의 자동차 중심의 안전 기술에 초점을 두고 있다. 반면에 농업기계 관련 교통안전 인프라가 취약한 농촌 도로의 경우 상대적으로 기술 연구는 미흡한 실정이다. Kim et al. (2018)의 연구에서 농촌지역 도로에서 발생하는 농업기계와 일반 차량과의 추돌 및 충돌 사고 예방을 위한 IoT 기반의 농업기계 주행 안내 교통표지판을 제안하였으나 개발로 이어지지 못하였다. 이 기술은 시야확보가 어려운 교통안전 사각지대에 차량 운전자에게 농업기계 접근 정보를 제공하여 차량 운전자로 하여금 주의 및 감속을 유도하도록 하는 것이다. 농업기계에 부착한 단말기(Machinery attached terminal)와 도로 주변에 설치된 교통정보 안내 단말기(Traffic information management terminal) 사이의 상호 근거리 무선통신(400Mhz)을 통해 농업기계의 주행 정보(농업기계 종류, 근접 거리, 주행 속도 등)를 VMS에 표현 기술이다(Figure 1). 본 연구에서는 Kim et al. (2018) 연구에 기초하여 IoT 접목 농업기계 주행 안내 기술을 구현하고, 농촌 지역 도로에 설치하여 일반 차량의 주행 속도 변화와 농업기계 및 차량 운전자가 느끼는 교통안전 체감도 평가를 수행하였다.
2.2 System implementation
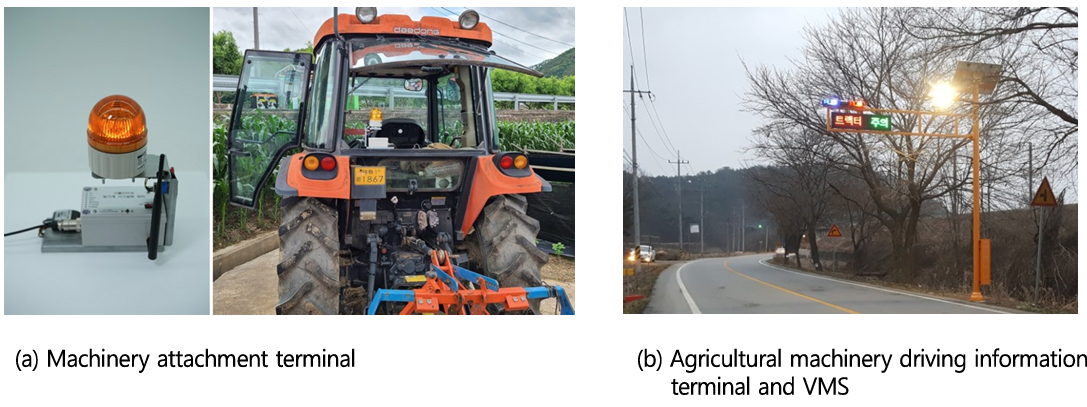
본 연구에서 구현한 IoT 기반의 농업기계 주행 정보 알림 VMS 시스템은 농업기계 부착 단말기와 교통정보 안내 단말기 간의 상호 정보전달 및 정보표현에 관한 것으로 Figure 2와 같다. 농업기계 부착 단말기의 주요 구성은 제어부, 메모리부, GPS (Global positioning system) 모듈, 통신 모듈로 구성하였다. 제어부의 MCU (Micro controller unit)는 32 Bit (ATXMega 128B1)로 단말기 내의 시스템 제어하고, 메모리부는 16KB RAM과 128KB Flash 메모리를 적용하여 농업기계 정보(예. 농업기계 종류, 위치 정보, 주행 속도) 등의 데이터를 저장한다. GPS는 M10578-A2로 수신기 감도 -143dBm, 위치 2.5~3m로 소모 전류는 14.0mA이다. GPS 데이터는 농업기계 운행 속도 및 교통표지판과의 거리 정보를 제공하는데 활용하였다. 그리고 농업기계 부착 단말기와 교통정보 안내 단말기 사이의 근거리 무선통신 방식은 400Mhz로 기본 전송 속도는 115Kbps이다. 농업기계 교통정보 안내 단말기는 제어부, 메모리부, GPS, 통신 모듈, 정보 표시부로 구성하였다. 제어부 MPU, 메모리, GPS 모듈, 통신 모듈은 농업기계 부착 단말기와 동일하게 적용하였다. 전광판 표시부의 경우 LED (Light emitting diode)는 256 Dots (16×16), 3가지 색상을 지원하고, 크기는 가로 1440mm, 세로 240mm로 문자와 도형을 양방향으로 출력하도록 구현하였다. 이때 농업기계 교통정보 안내 단말기와 농업기계 부착 단말기 간의 최대 감지 거리는 300m 내로 설정하였다. 본 연구에서 구현한 농업기계 부착 단말기(Figure 2(a))와 농업기계 교통정보 안내 단말기와 VMS (Figure 2(b))를 보여준다. 그리고 농업기계 접근 정보표시 방식은 농업기계 접근이 감지되지 않는 일반 상태의 경우 농업기계 사고 주의 정보 등을 제공하고, 농업기계 접근이 감지되면 농업기계 종류, 근접 거리, 주행 속도를 표시하도록 하였다. Table 1은 농업기계 주행 정보 알림 장치의 VMS 표현 방식이다.
|
Status |
Information |
Display method |
|
No agricultural machinery approach detected |
Caution agricultural machinery on road Agricultural
machinery accident area, |
Sliding |
|
Agricultural machinery approach detected |
Warning Tractor- Approach within 45m- Slow down |
Blinking |
본 연구에서 구현한 농업기계 주행 정보 알림 VMS 시스템 효과 평가를 위해 경상남도 양산시 원동면 일대 도로 2개 지역을 선정하여 시스템을 설치하였고, 일반 차량 주행 속도와 운전자가 느끼는 교통안전 체감도를 조사를 수행하였다. 시스템 설치 사전 조사는 2023년 10월 23일부터 26일에 실시하였고, 시스템 설치 이후 사후 측정 및 조사는 2023년 12월 11일부터 14일에 조사하였다.
3.1 Measurement of general vehicle driving speed
일반 차량 주행 속도 측정은 사전과 사후 모두 맑은 날씨 조건에서 동일하게 방식으로 측정을 실시하였고, 속도 측정 시간대는 오전 9:00~12:00시, 오후 13:00~18:00시, 그리고 야간 시간대인 18:00~21:00시에 이루어졌다. 차량 주행 속도 측정에 사용된 측정기는 부쉬넬 벨로시티 스피드건(BN 101911, USA)으로 자동차의 속도를 16~320km 범위까지 측정이 가능하다. 일반 차량 속도 측정 지점은 자동차 주행 방향 차선과 반대 주행 방향 차선 모두 측정하였다. A 지역의 경우 마을 진입 도로 방향(2 지점)에 농업기계 주행 알림 시스템을 설치하였고, 마을 진입 주행 방향(1-2-3)과 마을 진출 주행 방향(4-5-6) 6개 지점에 대한 속도를 측정하였다(Figure 3(a)). B 지역의 경우에는 마을 진출 도로 방향(2 지점)에 농업기계 주행 알림 시스템을 설치하였고, 마을 진출 주행 방향(1-2-3)과 마을 진입 주행 방향(4-5-6) 6개 지점의 주행 속도를 측정하였다(Figure 3(b)). 속도 측정 시 농업기계 주행 알림 시스템은 농업기계 접근이 감지된 상태로 농업기계 종류, 근접 거리 등 사고 주의 정보를 제공한 상태로 하였고, 주행 차량 운전자에게 측정 장면 노출을 최소화하기 위하여 지정된 장소의 차량 내부에서 측정하였다. 수집된 일반 차량 속도 측정 자료는 SPSS/Win 21.0 프로그램을 이용하여 농업기계 주행 정보 알림 VMS 시스템 설치 전후 차이 분석은 t-검정을 실시하였고, 시스템 설치 전후 일반 차량 속도 감속 효과 크기(Effect size) 분석을 위해 사전 사후 간 차이의 표준화 측정치(Cohen's d)를 활용하였다.

3.2 Survey on perceptions of traffic safety
교통안전 체감도 조사는 농업기계 주행 알림 시스템이 도로를 주행하는 일반 차량 운전자와 농업기계 운전자에게 미치는 주관적 영향을 평가하기 위해 수행하였다. 조사 대상자는 시스템 설치 지역 도로를 운행한 경험이 있는 일반 차량 운전자와 농업기계 운전자 1:1 대면 인터뷰 설문 조사를 실시하였다. 설문 주요 내용은 NDMI (2014)의 연구를 참고하여 시스템이 설치 전후 거주 지역 도로에 대한 교통안전 수준, 도로 주행 시에 느끼는 안전에 대한 심리적 부담 정도, 주관적 만족도(시스템 설치에 대한 만족 수준, 교통사고 예방 기여 수준, 지속적 설치 필요성)로 구성하였다(NDMI, 2014). 그리고 측정은 1점(매우 낮음)에서 5점(매우 높음)까지 리커트 척도(Likert Scale)를 사용하였다. 설문 조사에 응답자는 총 66명으로 농업기계 운전자 23명으로 모두 남성으로 평균 연령은 65.7±7.6세이고, 일반 차량 운전자의 경우 43명(남성: 39명, 여성: 4명)으로 참여자의 평균 연령은 65.8±8.0세이다. 수집된 조사 자료는 SPSS/Win 21.0 프로그램을 이용하여 설치 전후 차이 분석은 t-검정을 실시하였다.
4.1 Analysis of general vehicle driving speed
본 연구에서 농업기계 주행 알림 시스템 설치 전후의 일반 차량 주행 속도를 분석결과 2개 지역 모두 속도 변화에 영향을 미치는 것으로 나타났다. Table 2는 A 지역과 B 지역에서 시스템 설치 전후의 측정한 일반 차량 주행 평균 속도, 표준편차, 그리고 평균 속도 저감율을 보여준다. A 지역의 경우, 설치 전 평균 속도는 47.6±9.2km/h, 설치 후 43.9±8.7km/h로 통계적으로 유의미한 차이를 보였고(p < .0001), 일반 차량 평균 속도 감속율은 7.7%이다. B 지역의 경우에는 설치 이전 42.9±6.9km/h, 설치 이후 40.6±6.5km/h로 평균 속도 감속율은 5.5%로 나타났다(p < .0001). A와 B 지역의 주야간 평균 속도 분석결과, 주간의 경우 A 지역은 설치 이전 47.2±9.0km/h, 설치 이후 44.2±8.8km/h로 속도 감속율은 6.4%으로 통계적으로 유의미한 차이를 보였고(p < .0001), B 지역은 설치 이전 42.7±6.8km/h, 설치 이후 40.5±6.3km/h로 속도 감속율은 5.0%로 나타났다(p < .0001). 야간의 경우 A 지역의 평균 속도는 설치 이전 50.7±10.3km/h, 설치 이후 42.9±8.5km/h로 15.4% 감속율을 보였고(p < .0001), B 지역의 평균 속도는 설치 이전 44.9±7.2km/h, 설치 이후 40.8±7.2km/h로 9.1% 감속율을 보였다(p < .0001). 그리고 A와 B 지역의 차량 진입 및 진출 방향에 따른 속도 분석결과, A 지역에서 마을 진입 방향(1-2-3)의 경우 설치 전후 주간 평균 속도는 45.8±8.5km/h, 43.1±8.8km/h (p < .0001), 야간은 49.7±10.3km/h, 41.4±7.9km/h를 보였다(p < .0001). 마을 진출 방향(4-5-6)에서는 설치 전후 주간 평균 속도는 48.5±9.2km/h, 45.2±8.6km/h (p < .0001), 야간은 51.9±10.1km/h, 45.2±8.4km/h를 보였다(p < .0001). B 지역에서는 마을 진출 방향(1-2-3)의 경우 설치 전후 주간 평균 속도는 44.0±5.9km/h, 41.1±6.2km/h (p <. 0001), 야간은 45.3±7.2km/h, 41.0±6.7km/h를 보였다(p < .0001). 마을 진입 방향(4-5-6)에서는 설치 전후 주간 평균 속도는 48.5±9.2km/h, 45.2±8.6km/h (p < .0001), 야간은 51.9±10.1km/h, 45.2±8.4km/h를 보였다(p < .0001).
|
Region |
Site |
Time of day |
Installation |
Mean |
SD |
Growth rate |
t-value |
p-value |
|
Area A |
Driving direction |
Day |
Before |
45.8 |
8.5 |
-6.0% |
4.116 |
< .0001 |
|
After |
43.1 |
8.8 |
||||||
|
Night |
Before |
49.7 |
10.3 |
-16.6% |
8.629 |
< .0001 |
||
|
After |
41.4 |
7.9 |
||||||
|
Driving direction |
Day |
Before |
48.5 |
9.2 |
-6.9% |
9.234 |
< .0001 |
|
|
After |
45.2 |
8.6 |
||||||
|
Night |
Before |
51.9 |
10.1 |
-12.8% |
5.896 |
< .0001 |
||
|
After |
45.2 |
8.4 |
||||||
|
Total |
Day |
Before |
47.2 |
9.0 |
-6.4% |
9.777 |
< .0001 |
|
|
After |
44.2 |
8.8 |
||||||
|
Night |
Before |
50.7 |
10.3 |
-15.4% |
10.865 |
< .0001 |
||
|
After |
42.9 |
8.5 |
||||||
|
Before |
47.6 |
9.2 |
-7.7% |
13.136 |
< .0001 |
|||
|
After |
43.9 |
8.7 |
||||||
|
Area B |
Driving |
Day |
Before |
44.0 |
5.9 |
-6.5% |
8.946 |
< .0001 |
|
After |
41.1 |
6.2 |
||||||
|
Night |
Before |
45.3 |
7.2 |
-9.6% |
5.595 |
< .0001 |
||
|
After |
41.0 |
6.7 |
||||||
|
Driving |
Day |
Before |
41.2 |
7.1 |
-3.0% |
5.280 |
< .0001 |
|
|
After |
40.0 |
6.3 |
||||||
|
Night |
Before |
44.3 |
7.2 |
-8.6% |
4.267 |
< .0001 |
||
|
After |
40.5 |
7.9 |
||||||
|
Total |
Day |
Before |
42.7 |
6.8 |
-5.0% |
15.011 |
< .0001 |
|
|
After |
40.5 |
6.3 |
||||||
|
Night |
Before |
44.9 |
7.2 |
-9.1% |
5.952 |
< .0001 |
||
|
After |
40.8 |
7.2 |
||||||
|
Before |
42.9 |
6.9 |
-5.5% |
15.162 |
< .0001 |
|||
|
After |
40.6 |
6.5 |
||||||
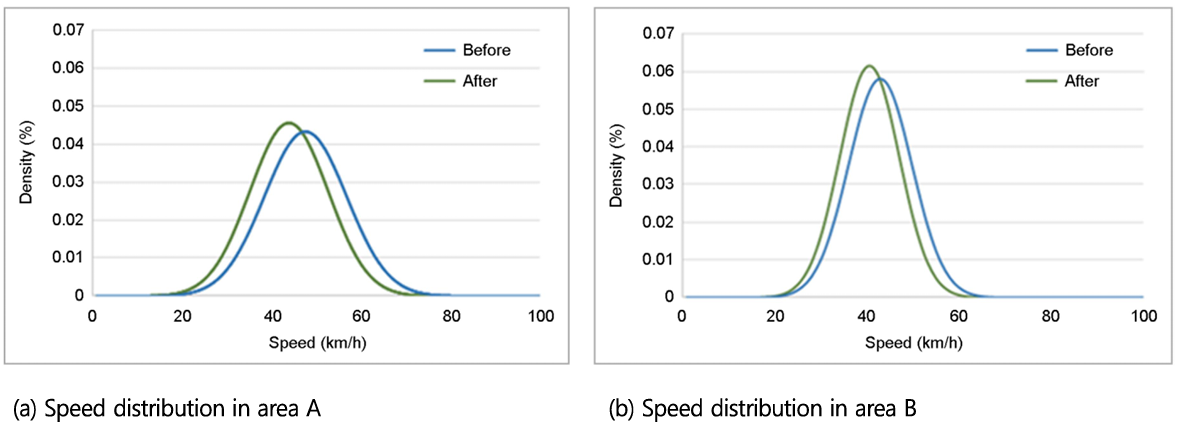
Figure 4는 A 지역과 B 지역의 농업기계 주행 알림 시스템 설치 전후 전체 차량 속도 분포를 비교한 그래프를 보여준다. 본 연구에서 사전 사후 간 차이의 표준화 측정치(Cohen's d)를 분석한 결과, Cohen's d 값은 A 지역은 0.35, B 지역은 0.41로 어느 정도 중간 정도의 효과 크기를 보였다. Cohen's d는 두 그룹 간의 평균 차이를 표준편차로 나눈 값을 나타내는 효과 크기 지표로, 그룹간 차이의 크기를 정량적으로 평가하는 데 사용된다. 이를 통해 두 그룹 간의 차이가 통계적으로 유의미한 차이분석뿐만 아니라, 그 차이가 실제로 얼마나 있는지를 평가할 수 있다. Cohen (1988)에 따르면, d 값은 0.2는 작은 차이, 0.5는 중간 차이, 0.8 이상은 큰 차이를 나타내며, 값이 클수록 두 그룹 간 차이가 크다는 것을 의미한다. A 지역과 B 지역 속도 분포를 살펴보면, A 지역의 경우 설치 전후 모두 40~50km/h 구간이 가장 높은 빈도를 보였고, 시스템 설치 이전과 이후를 비교해보면 시스템 설치 이후 30~40km/h 구간이 증가하였고 60km/h 이상 구간은 낮아지는 결과를 보였다. 이와 같은 결과는 시스템 설치 이후 전반적인 차량 속도가 구간별 감소하는 것을 보여준다. B 지역의 경우 전반적으로 시스템 설치 전후 40~60km/h에 높은 빈도를 보였으나 시스템 설치 이후 50km/h 구간에서 빈도수가 감소하는 경향을 보였다. Table 3은 시스템 설치 전후 구간별 차량 주행 속도 분포를 보여준다.
|
Area Interval (km/h) |
A |
B |
||
|
Before |
After |
Before |
After |
|
|
Less than 30 |
0 |
49 |
3 |
45 |
|
30 or more to less than 40 |
265 |
276 |
267 |
327 |
|
40 or more to less than 50 |
642 |
483 |
774 |
592 |
|
50 or more to less than 60 |
306 |
208 |
219 |
61 |
|
60 or more to less than 70 |
104 |
46 |
20 |
9 |
|
70 or more to less than 80 |
17 |
3 |
0 |
1 |
|
80 or more |
4 |
0 |
1 |
0 |
|
Total |
1,338 |
1,065 |
1,284 |
1,035 |
본 연구에서 구현한 농업기계 주행 알림 시스템 설치 결과, A 지역과 B 지역 모두에서 일반 주행 차량 속도는 유의미한 차이로 감속하는 효과가 있는 것으로 나타났으며, 주간 보다 야간 시간대에 감속율이 높게 분석되었다. 2개 지역의 전체 평균 속도 감속율이 A 지역의 경우 7.7%로 B 지역의 5.5% 보다 감속율에 차이를 보이는 것은 A 지역의 경우 완만한 곡선 구간으로 B 지역의 급한 곡선 구간보다 평상 시에 일반 차량의 주행 속도가 높아 감속율이 A 지역이 높게 나타난 것으로 판단된다. 또한 B 지역의 마을 진입 방향인 지점의 경우 차량 운전자가 농업기계 주행 알림 시스템이 보이지 않은 상황에서의 측정한 결과가 반영되어 전체 평균 속도가 과소 평가된 것으로 사료된다. 또한 농업기계 주행 안내 시스템 설치 전후 일반 차량 주행 속도가 감속과 효과 크기 분석결과를 통해 일반 차량과 농업기계 간의 추돌 및 충돌 사고 예방에 효과적 대안으로 활용될 수 있을 것으로 기대된다.
4.2 Result of perceptions of traffic safety
Table 4는 농업기계 주행 알림 시스템 설치 전후 지역의 농업기계 운전자의 교통안전 체감도 조사결과를 보여준다. 거주 지역 도로에 대한 교통안전 수준은 시스템 설치 전 평균 1.8±0.8점, 설치 후 평균 3.8±1.1점으로 농업기계 주행 안내 교통표지판이 도로 안전 인식을 영향을 미치는 것으로 조사되었다(p < .0001). 농업기계 주행 시에 느끼는 안전에 대한 심리적 부담 정도는 4.0±09점에서 2.4±0.7점으로 불안감을 감소시킨 것으로 나타났다(p < .0001). 그리고 주관적 만족도 조사결과, 시스템 설치 만족(4.6±0.5점), 교통사고 사고 예방 기여(4.4±0.6점), 지속적 설치 필요성(4.7±0.5점)은 4.0점 이상으로 긍정적인 것으로 조사되었다. Figure 5은 농업기계 주행 알림 시스템 설치 전후 지역의 농업기계 운전자의 교통안전 체감도 및 만족도 조사결과를 보여준다.
|
Perceptions of traffic safety |
Installation |
Mean |
SD |
t-value |
p-value |
|
Traffic safety levels on
local roads |
Before |
1.8 |
0.8 |
-6.797 |
< .0001 |
|
After |
4.6 |
0.5 |
|||
|
Psychological stress experience of driving |
Before |
4.0 |
0.9 |
6.110 |
< .0001 |
|
After |
2.4 |
0.7 |

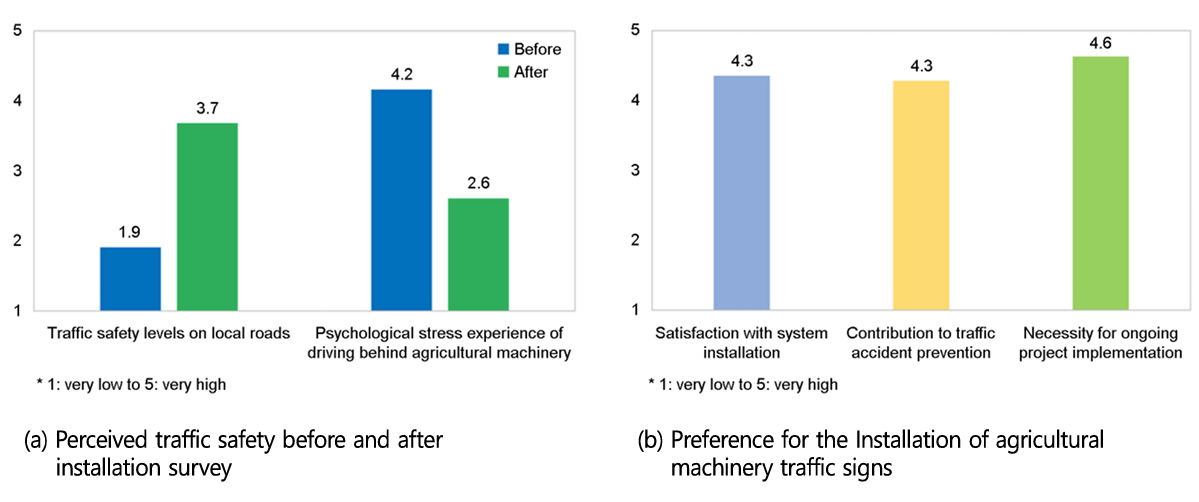
Table 5는 농업기계 주행 알림 시스템 설치 전후 지역의 일반 차량 운전자의 교통안전 체감도 조사결과를 보여준다. 시스템 설치 전후 주행 시에 도로에 대한 교통안전 수준은 설치 이전 1.9±0.9점에서 설치 이후 3.7±0.8점로 증가하였고(p < .0001), 차량 주행 시 느끼는 심리적 부담은 시스템 설치 전후 4.2±0.8점에서 2.6±0.5점으로 감소하였다(p < .0001). 또한 시스템 설치 만족도(4.3±0.5점), 교통사고 예방 기여도(4.3±0.3점), 지속적 설치 필요성(4.6±0.5점)도 평균 4.3 이상으로 높은 수준을 보였다. Figure 6은 일반 차량 운전자 대상으로 조사한 교통안전 체감도 및 만족도 조사결과이다.
|
Perceptions of traffic safety |
Installation |
Mean |
SD |
t-value |
p-value |
|
Traffic safety levels on local roads |
Before |
1.9 |
0.9 |
-9.985 |
< .0001 |
|
After |
3.7 |
0.8 |
|||
|
Psychological stress experience of driving |
Before |
4.2 |
0.8 |
11.282 |
< .0001 |
|
After |
2.6 |
0.5 |
본 연구는 농촌 지역도로에서 발생하는 농업기계 관련 교통사고 예방을 위해 IoT 기반의 농업기계 주행 알림 VMS 시스템 구현 및 평가를 수행하였다. Kim et al. (2018)이 제안한 VMS를 활용한 IoT 기반의 농업기계 주행 정보 알림 시스템 설계를 기반으로 시스템을 구현하였고, 농촌 지역 도로 2개를 선정하여 설치 및 효과를 평가하였다.
농업기계 주행 알림 시스템을 설치한 2개 지역을 주행하는 일반 차량의 주행 속도 측정 결과, 평균 주행 속도는 5.5~7.7% 감속하였고, 주간보다 야간 시간대에 높은 9.1~15.4% 감속율을 보였다. 또한 시스템 설치 이후 농업기계 운전자와 일반 차량 운전자 모두 교통안전 체감도 조사결과에서 시스템 설치에 따른 교통안전 수준은 증가하였고, 교통사고 위험에 대한 심리적 부담은 감소하여 매우 긍정적 반응을 확인할 수 있었다. 이와 같은 결과는 전방 시야확보가 어려운 농촌 지역의 도로에서 농업기계가 접근 주행 정보를 제공함으로써 농업기계 운전자와 일반 차량 운전자 모두에게 교통사고 예방에 기여할 수 있을 것으로 판단된다. 그러나 본 연구는 농촌 도로 일부 지역 도로를 대상으로 평가를 수행하여 다양한 지형적 특징, 교통 조건 등을 반영하지 못한 한계가 있다. 향후 추가적인 연구를 통해 지속되는지 모니터링과 VMS에 대한 효과적인 정보 제공 방식에 대한 연구를 수행할 것이다.
본 연구에서 구현한 IoT 기반 농업기계 주행 정보 알림 시스템은 교통안전시설 인프라가 열악한 농촌 지역 도로의 교통 안전을 확보하는데 의미가 있고, 농업기계 관련 교통사고 위험을 저감하는데 중요한 역할을 할 것으로 기대된다.
References
1. Arnal, P., Lopez-Maestresalas, A., Arazuri, S., Mangado, J.M. and Jaren, C., A Multi-year Analysis of Traffic Accidents Involving Agricultural Tractors, Chemical Engineering Transactions, 58, 109-114, 2017. doi: 10.3303/CET1758019
2. Basso, F., Cifuentes, A., Pezoa, R. and Varas, M., A Vehicle-by-vehicle Approach to Assess the Impact of Variable Message Signs on Driving Behavior, Transportation Research Part C Emerging Technologies, 125(1), 103015, 2021. doi: 10.1016/j.trc.2021.103015
Google Scholar
3. Behl, T., Verlage, A., Gwehenberger, J., Heimsath, D., Kühn, M. and Bende, J., Eds., Personenschadenunfälle mit landwirtschaftlichen Zugmaschinen. Gesamtverband der Deutschen Versicherungswirtschaft e. V., Berlin, Germany, 2011.
4. Bernik, R. and Jerončič, R., The Research of the Number of Accidents with the Agriculture and Forestry Tractors in the Europe and the Main Reasons for those Accidents, Strojniški vestnik - Journal of Mechanical Engineering, 54(7-8), 557-564, 2008.
5. Chatterjee, K. and McDonald, M., Effectiveness of using variable message signs to disseminate dynamic traffic information: Evidence from field trails in European cities, Transport Reviews, 24(5), 559-585, 2004. doi: 10.1080/0144164042000196080
Google Scholar
6. Cohen, J., Statistical Power Analysis for the Behavioral Sciences, Psychology Press, New York, USA, p. 67, 1988.
Google Scholar
7. Choi, S.H., Lee, S.Y., Jang, T.Y. and Do, M.S., Effect of Agricultural Machine Lighting systems on Drivers Night Visibility, Journal of The Korea Institute of Intelligent Transportation Systems, 16(4), 25-35, 2017. doi: 10.12815/kits.2017.16.4.25
Google Scholar
8. Dimitrovski, Z., "Fatal Consequences in Traffic Accidents with Tractors in the Agriculture of Republic of Macedonia", Scientific proceedings XXI international Scientific Technical Conference "trans & Motauto" '13', 3 (pp. 60-63), 2013.
Google Scholar
9. Hong, K., Kim, J., Ha, J., Kim, G. and Kim, J., A Study on the Satisfaction Analysis of Smart Traffic Safety Systems using Importance-Performance Analysis, Journal of the Society of Disaster Information, 18(4), 754-768, 2022. doi: 10.15683/kosdi.2022.12.31.754
Google Scholar
10. Karimi, K. and Faghri, A., Farm Vehicle Crashes on US Public Roads: A review paper, Open Journal of Safety Science and Technology, 11(2), 34-54, 2021. doi: 10.4236/ojsst.2021.112004
Google Scholar
11. Kim, I., Park, S., Chae, H.S., Kim, K., Lee, C. and Kim, S.H., Development of Guidelines for Night Visibility Evaluation and Use of Safety Reflectors in Agricultural Machinery, Journal of the Ergonomics Society of Korea, 42(6), 675-687, 2023. doi: 10.5143/ JESK.2023.42.6.675
Google Scholar
12. Kim, I., Park, S., Chae, H.S., Kim, S.H. and Kim, K., A Study on Designing Standards for Safety Reflector Installation to Prevent Agricultural Machine's Traffic Accidents, Journal of the Ergonomics Society of Korea, 41(6), 467-480, 2022. doi: 10.5143/ JESK.2022.41.6.467
Google Scholar
13. Kim, I., Kim, K., Kim, H.C., Seo, M.T., Lee, M., Park, S. and Ko, M., 2018. A Study of an IoT-based Safety System for Agricultural Machine-related Traffic Accidents in Rural Area, Journal of the Ergonomics Society of Korea, 37(5), 575-589, 2018. doi: 10.5143/ JESK.2018.37.5.575
Google Scholar
14. Kim, K.B. and Hwang, K.S., A Comparative Study on the Accident Characteristics of the Elderly According to the Urban-Rural Complex Area and Regional Types, Journal of the Korea Academia Industrial Cooperation Society, 18(7), 224-236, 2017. doi: 10.5762/KAIS.2017.18.7.224
Google Scholar
15. KoROAD (Korea Road Traffic Authority), 2018~2022 Traffic accidents statistical analysis data, 2023.
16. NDMI (National Disaster Management Research Institute), A Study on the Effect of Safety Village Project on Resident's Awareness, 2014.
17. Orey, D., Pedro, M. and Ferreira, M., ITS for Sustainable Mobility: A Survey on Applications and Impact Assessment Tools, IEEE Transactions on Intelligent Transportation Systems, 15(2), 477-493, 2014. doi: 10.1109/TITS.2013.2287257
Google Scholar
18. Sui, Y. and Young, R., Impact of Dynamic Message Signs on Speeds Observed on a Rural Interstate, Journal of Transportation Engineering, 140(6), 04014020, 2014. doi: 10.1061/(ASCE)TE.1943-5436.0000664
Google Scholar
PIDS App ServiceClick here!