eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Jong Hyun Kim
, Chang Gi Lee
, Sung Joon Choi
, Young Taek Cha
10.5143/JESK.2025.44.4.475 Epub 2025 September 04
Abstract
Objective: The aim is to verify the usability of an excavator simulator by comparing the physical and mental workload of excavator operators according to work scenarios.
Background: Existing studies on excavator workload have primarily focused on vibration and posture. However, there is a lack of research quantitatively assessing both physical and mental workload across various task scenarios. To address this gap, this study conducts a preliminary evaluation of operator workload using a simulator capable of task-specific analysis.
Method: The excavator operation process was divided into six tasks: boarding, seating, driving, working, maintenance, and parking. Ergonomic evaluation factors were derived through expert and operator interviews as well as previous research. Among these, the core tasks—driving and excavation/loading—were selected for detailed analysis. Ten experienced excavator operators participated in the study. Each participant was equipped with eight sEMG channels (four muscles on both arms: Upper Trapezius, Biceps Brachii, Brachioradialis, and Flexor Carpi Ulnaris) and one HRV sensor positioned under the left chest. Two scenarios were tested: ① driving on slopes of 25°, 30°, and 35°, and ② excavation and truck loading. Muscle fatigue was assessed using the zero-crossing difference ratio from EMG data, while SDNN, RMSSD, and LF/HF ratio were used as indicators of mental stress.
Results: Mental workload, as indicated by SDNN, increased by 58.6% (to 24.9ms) during slope driving and by 60.3% (to 23.9ms) during excavation and loading, compared to the pre-task baseline. Muscle fatigue patterns varied by task: forearm muscles showed higher fatigue during excavation and loading, while upper arm muscles were more fatigued during slope driving.
Conclusion & Application: The findings confirm that both muscle fatigue and mental stress vary significantly depending on the task scenario. These differences can be quantitatively measured using sEMG and HRV in a simulator environment. This approach can be effectively utilized in future R&D to reduce operator workload and optimize excavator task design.
Keywords
Workload of excavator's operator Muscle fatigue Mental workload Virtual reality motion simulator
건설기계 및 굴삭기 분야의 R&D에서는 유압, 펌프 등 기계적 성능 중심의 기술 개발만으로는 중국을 포함한 후발 주자들과의 기술적 차별화를 이루기 어렵고, 시장 경쟁력 확보에 한계가 있다. 이에 따라 1990년대 이후 국내외 굴삭기 업체들과 선도 기술 보유 기업들은 시장 경쟁력을 확보하기 위해 '인간 친화형 기술'에 대한 연구개발(R&D)에 집중해 왔다. 그러나 인간, 즉 굴삭기 작업자를 위한 연구는 주로 진동, 자세, 소음 등에 국한되어 있으며, 보다 폭넓은 작업자 중심 연구는 부족한 실정이다(Kuijt-Evers et al., 2003; Zimmermann et al., 1997).
선행연구에 따르면 1990년대 후반 이후 굴삭기 업체 간 기술 수준 격차가 줄어들었으며, 외형 설계 요소보다 사용자 친화성, 조작 편의성, 편안함, 안전한 작업 수행 능력이 기술 경쟁력의 핵심 요소로 부각되었다(Yoon and Munn, 1999).
기술 중심에서 인간 중심으로 굴삭기 개발 트렌드가 전환됨에 따라, 조작성 연구, 사용성 평가, 감성 평가, 사용자 인터페이스(User Interface), 인간-기계 인터페이스(Human-Machine Interface, HMI) 관련 연구들이 활발히 수행되었다(Adarsh Kumar et al., 2001). 이와 같은 R&D 동향에 따라 조작 방식 별 작업량, 성능에 미치는 영향에 대한 연구들이 수행되었고(Hughes and Jiang, 2010), 다양한 조작 방식을 연구하고, 성능, 작업량 등을 분석하는 작업 효율성, 작업 성능에 관한 정량화 연구들과 작업자의 시야 개선 디자인 개발(Byun and Lyu, 1998), 인체 치수 기반 작업(조작) 레이아웃 디자인 연구 등과 같은 작업자의 인체 치수 기반의 설계 변수 도출을 통한 연구들을 통해 인간(작업자) 중심 굴삭기 기술 개발 연구가 수행되었다(Jung and Jung, 1999). 그러나 실제 작업을 수행하는 작업자에게 미치는 작업 부하와 영향에 대한 연구는 진동이나 충격 중심의 접근에 그치고 있으며, 신체적 피로와 정신적 스트레스를 정량적으로 평가하거나 이를 줄이기 위한 기술 개발은 미흡한 상황이다(Adarsh Kumar et al., 2001).
굴삭기와 같은 건설기계 차량은 일반 가전제품이나 일상적인 제품들에 비해 대규모 개발비가 투입되기 때문에, 실차 시뮬레이터를 활용하여 다양한 설계 변수들을 조건으로 설정하고, 작업자에게 미치는 영향을 평가하여 설계를 최적화하기 위한 R&D에 대한 비용 투자가 어려운 분야이다. 그러나 건설기계 기술을 선도하는 주요 글로벌 기업들을 중심으로 실차 시뮬레이터를 활용한 연구들이 수행되고 있다. 이와 같은 실차 시뮬레이터는 다양한 작업 조건, 부품, 설계 변수들에 따른 작업 효율성 등에 대한 평가를 통해 설계 변수 의사결정과 개선 요소를 도출하고 최적화하는 도구로 활용되고 있다. 또한 HMI와 햅틱 기술을 활용한 소규모 실험실 규모의 시뮬레이터들은 운전자 교육, 굴삭기 사용성 평가에 활용하는 연구들이 수행되었다(Adarsh Kumar et al., 2001). Hayn and Schwarzmann (2010)과 Benjamin et al. (2010)은 HMI와 햅틱을 이용한 굴삭기 사용성 평가 방법에 대한 연구를 수행하였고, 이와 같은 연구 방법들은 굴삭기 설계와 개발 효율성을 향상시켰다(Elton, 2009), 더불어 작업 자세에 대한 가이드라인을 개발하고, 스트레스를 줄이기 위한 연구들도 수행된 사례가 있었다(Akyeampong et al., 2013).
본 연구의 목적은 작업 시나리오 별 굴삭기 작업자의 신체적 · 정신적 작업 부하 비교를 통해 굴삭기 시뮬레이터의 활용 가능성을 확인하는 것이다. 주요 작업인 경사로 주행, 굴삭 및 상차 작업의 시나리오 별 신체적(근 피로도), 정신적(스트레스 지수) 작업 부하의 차이를 통해 시뮬레이터 기반의 작업 부하 평가 활용성을 시사하였다. 따라서 본 연구는 다음의 세 가지 주요 연구내용으로 구성하였다. 첫 번째로 굴삭기 작업자와 개발자 등의 이해관계자 인터뷰를 통해 굴삭기 작업 시나리오를 정의하고, 핵심 태스크(운전, 작업)들을 정의하였다. 그리고 핵심 태스크에서의 평가 요소들을 도출하였다. 두 번째로 시뮬레이터를 활용하여 '3가지 각도의 경사로 주행 태스크'와 '굴삭과 상차 태스크', 이렇게 두 가지 핵심 태스크 평가를 위한 시나리오(Task Scenario)를 개발하였다. 세 번째로 핵심 태스크에서 굴삭기 운전자의 신체적 · 정신적 스트레스 분석을 위해 근전도 측정을 통한 근 피로도 분석과 심박변이도에 의한 심리적 스트레스에 대한 측정과 분석을 수행하였다.
2.1 Stakeholder and previous study survey based on work scenario
굴삭기는 개발, 연구, 산업 현장에서 다양한 이해관계자들이 관여하는 장비로, 인간 중심의 굴삭기 R&D를 위해서는 작업자, 개발자, 현장 관리자 등 다양한 주체들의 의견을 반영할 수 있는 연구 체계가 요구된다. 따라서 본 연구에서는 굴삭기 태스크 시나리오를 ① 탑승(Get on), ② 착석(Seat), ③ 운전(Driving), ④ 작업(Working), ⑤ 주차(Parking), ⑥ 관리(정비), (Maintenance), 6가지 세부 태스크로 구분하였으며, 각 태스크에 대해 이해관계자 인터뷰를 통해 평가 요소(종속변수)를 도출하였다(Table 1, 2).
2.1.1 Stakeholder survey based on work scenario
굴삭기 시뮬레이터 운용 전문가(V사), 시뮬레이터 활용 Human Factors 연구자(D 연구원), 굴삭기 작업자(2명, 경력 10년 이상)가 이해관계자 인터뷰에 참여하였다. 인터뷰는 1:1 심층 인터뷰 방식으로 진행되었다. 굴삭기 개발 및 관련 연구자들을 대상으로는 '연구에서 시뮬레이터의 활용', '관련 연구개발 프로세스', '시뮬레이터의 역할', '사용성 평가 연구사례'에 대한 인터뷰를 수행하였다. 굴삭기 작업자들을 대상으로는 '작업자의 숙련성', '조작감과 효율성', '작업 스트레스', '굴삭기 관리 및 AS 문제점'에 대한 내용으로 인터뷰를 수행하였다.
개발자(연구자)와 작업자(운전자)의 인터뷰 내용을 분석한 주요 결과는 (Table 1)과 같다. 개발자는 주로 착석 및 좌면에서의 굴삭기 진동과 관련된 평가 이슈와 작업 수행속도, 효율성에 관련된 이슈에 관심이 많았으며, 작업자는 작업에서의 작업인력과의 협업 및 정밀한 작업에 대한 정신적 스트레스, 작업계획 수립에 대한 부담감, 작업에 수반되는 기타 규제에 대한 요구사항과 문제점에 대한 의견을 제시하였다.
|
The main contents of excavator researcher
interview |
||||
|
Get
on |
Seat |
Driving /
Work |
Maintenance |
Park and
ETC. |
|
International Stairs and handle Case of accident |
ISO of vibration |
Task efficiency Task error |
Self-maintenance |
Enhance safety for collaborative workers Break time compliance |
|
The main contents of excavator
operator interview |
||||
|
Get
on |
Seat |
Driving / Work |
Maintenance |
Park and ETC. |
|
Accident Safety rules Work manual |
MSDs Seating and working |
Stress (mental) Stress type Difficulty in formulating |
Difficulty of self- Warranty period Consumable cost |
Insurance Security Break time Convenience |
2.1.2 Workload evaluation valuable based on work scenario
굴삭기 작업자에게 미치는 영향(Human effect)을 다룬 선행연구를 바탕으로, 평가 요소와 6가지 세부 태스크로 구성된 평가 시나리오 및 항목을 설계하였다.
선행연구들에서 도출된 평가항목들은 대부분 운전(Driving)과 작업(Working)에서 나타났다. 굴삭기 사용성 평가들은 대부분의 작업자 느끼는 진동에 대한 평가(Alphin et al., 2010), Nasa TLX를 활용한 정신부하평가(Adarsh Kumar et al., 2001), 작업 자세에 대한 평가들이 대부분이었다(Akyeampong et al., 2013). 따라서 본 연구에서는 자동차, 농기계 등 타 산업분야의 작업부하평가 연구와 이해관계자 조사를 통해 도출된 요소들을 참고하여, 운전과 작업에 대한 평가 태스크를 설계하고, 굴삭기 작업자의 작업 부하를 정량적으로 평가할 수 있는 변수들을 정의하였다(Table 2).
선행연구들에서 나타난 결과를 참고하여 작업 부하가 높은 것으로 나타난 '운전'과 '작업'을 핵심 태스크로 정의하였으며, 신체적 스트레스 지표는 근전도(sEMG: Surface Elecrtomyography) 측정 데이터를 활용하여, 근 피로도(Muscle Fatigue: Zero Crossing Rate (ZCR)의 감소)를 분석하였으며, 정신적 스트레스는 심박변이도(HRV: Heart Rate Variability) 측정한 데이터를 SDNN (Standard Deviation of NN intervals)과 RMSSD (Root Mean Square of Successive Differences), LF/HF ratio (Low Frequency to High Frequency ratio)로 분석하였다. 그리고 이들을 신체적 · 정신적 작업 부하의 종속변수로 설정하였다(Table 2).
|
|
Scenario
touch points |
|||||
|
Get on |
Seat |
Driving |
Working |
Maintenance |
Parking |
|
|
Task |
Get on (IHSA, 2017) |
Seating |
Driving slop (25, 30, 35 degrees) |
Excavation and truck
loading |
Oil Inspection Parts |
Parking |
|
Valuable
/ Measurement |
Distance between (IHSA, 2017) |
Contact pressure |
SDNN (standard deviation
of normal to normal), RMSSD MF (Median Frequency) / |
Workload / RULA,
REBA (Peppoloni Workload / NASA - TLX (Adarsh Kumar |
Workload Workload |
|
|
Definition
of variable |
Distance |
Pressure Force Area |
SDNN/ms: Stress response RMSSD: Stress recovery MF: Index of Muscle fatigue |
Index Score |
Index Score |
|
신체적 작업 부하 지표로 설정한 근 피로도는 근전도 신호의 주로 주파수 분석을 통해 분석된다. 근전도 신호가 초기 대비 저주파로 이동하는 비율, 즉 주파수의 감소 비율은 근 피로도의 증가를 나타내는 지표이다. 근전도 신호의 주파수 분석을 통해 근 피로도 분석에서 오래 전부터 활용되고 있는 ZCR의 감소 비율은 근전도 신호가 0을 지나가는 횟수를 일정시간 기준으로 계산하고, 이의 감소 비율(저주파로의 이동)을 통해 근 피로도를 계산하는 방법이다(Inbar et al., 1986; Kim et al., 2018).
정신적 작업 부하 지표인 SDNN은 스트레스에 대한 대응 능력을 나타내는 지표로, 스트레스를 받을 경우, SDNN 값이 감소하는 경향이 있으며, 임상적으로 정상 범위는 50~100ms이다. 그리고 RMSSD는 스트레스에 대한 회복력을 나타내는 지표로 낮은 RMSSD는 스트레스 상태와 피로가 누적되는 상태를 나타내는 지표로 정상 범위는 20~50ms이다. LF/HF 비율은 교감신경이 부교감신경보다 우위를 보이는 상태를 의미하며, 이 값이 증가할수록 스트레스 및 긴장 상태가 높아졌음을 시사한다. 정상 범위는 일반적으로 0.5에서 2.0 사이로 제시된다(Lee et al., 2022; Kim and Woo, 2011).
2.2 Workload evaluation of excavator's pperator
2.2.1 Participants and task scenario
Participants
10명(나이: 40.2±8.23세, 작업 경력: 5.9±8.52년, 성별: 남자)의 굴삭기 전문 작업자가 평가에 참여하였고, 시뮬레이터 또는 VR 환경에서 멀미를 경험한 적이 없고, 굴삭기를 보유하고 있으며, 사용 경력 1년 이상, 어깨와 팔에 근골격계 질환 경험이 없는 자로 선정하였다.
Task scenario
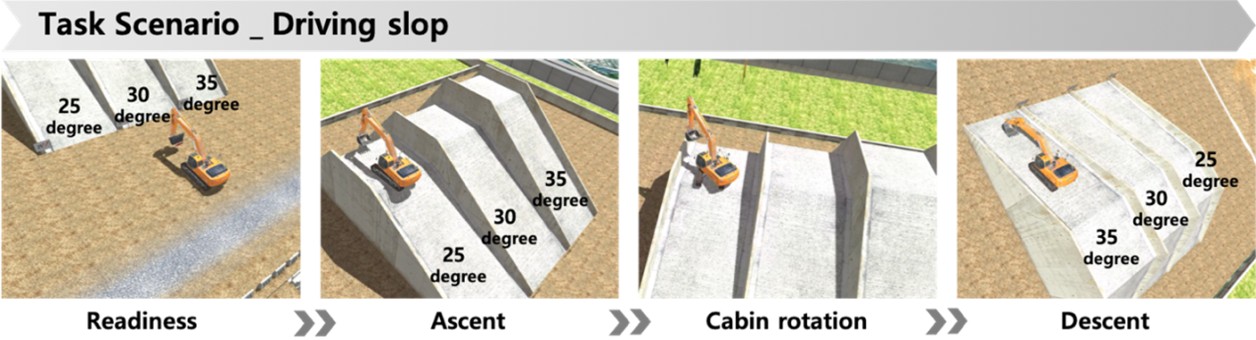
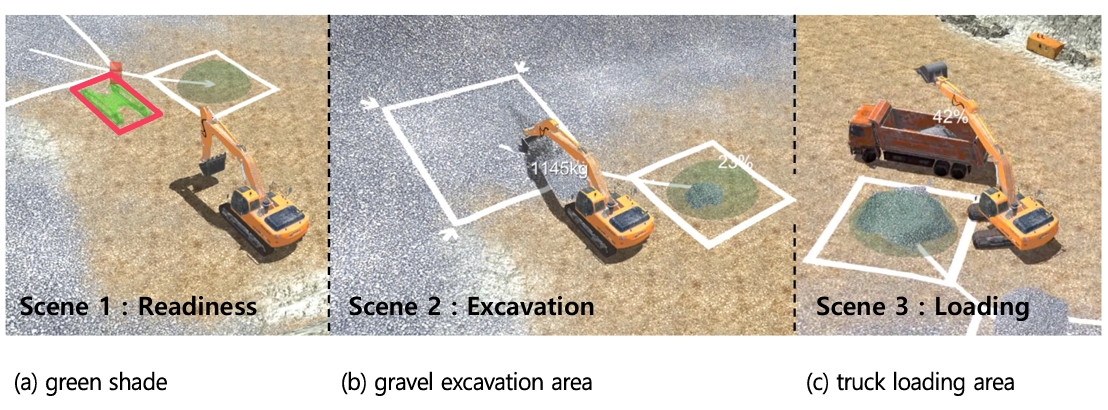
평가 참여자는 실험 전에 상체를 탈의한 후 8개 채널의 sEMG 전극과 HRV 1개 채널의 전극을 부착하였다. 작업자가 수행한 핵심 태스크는 '경사로 주행(Driving slop)'과 '굴삭 및 상차 작업(Excavation and loading)' 크게 두 가지 태스크에서 수행되었고, 스트레스에 대한 기준 값 측정을 위해 캐빈에서 5분간 대기 후에 작업을 시작하였다. 첫 번째로 '경사로 주행' 과업은 25도, 30도, 35도의 경사로를 올라간 뒤 캐빈을 회전시켜 다시 내려오는 방식으로 구성되었으며, 세 가지 경사 조건에서 반복 수행되었다(Figure 1). 두 번째로 '굴삭 및 상차'는 시동 후 지시된 녹색 음영 지역(Figure 2(a): Green shades)으로 이동 후 흰색선 안쪽 부분(Figure 2(b): Gravel excavation area)의 자갈(10,000Kg)을 굴삭 후, 트럭 상차 작업(Figure 2(c): Truck loading area)을 수행하였다. 수행된 모든 태스크는 참여자과 목표한 과업을 달성할 때까지 계속되었으며, 이에 참여자 별 평가 수행시간은 개인별 차이가 있었다. 태스크 별 평균 작업 수행시간은 경사로 주행은 536.4(±44.5)초, 굴삭 및 상차는 596.7(±4.67)초로 나타났다.
2.2.2 Simulator and measurement
Simulator
평가에 활용된 시뮬레이터는 경북 경산 건설기계 산업단지 내 건설기계기술센터(한국생산기술연구원)에 소재하며, 7축 모션플랫폼 (6 DOF + Yaw Table)과 돔 형태의 스크린(10m/360 degree X 80degree)으로 구성되었다(Figure 3(a)). 모션플랫폼 위에 굴삭기 실차 캐빈(Figure 3(b))으로 구축된 시뮬레이터는 작업 환경 및 시나리오 태스크를 컨트롤 데스크(Figure 3(c))에서 통제하여, 굴삭기 작업자가 시나리오에 맞추어 태스크를 수행할 수 있게 제어하였다.

굴삭기 시뮬레이터는 산업기술개발기반 구축사업(과제명: 차세대 건설기계부품 융복합 설계지원센터 구축)을 통해 구축되었으며, 각 동작 시뮬레이션 정확도는 70~90%로 구현되었고, 굴삭기 주행 동작은 90.2%, 굴삭기 굴삭 및 상차 동작은 75.9% 평가되었다(Park et al., 2020).
Measurement
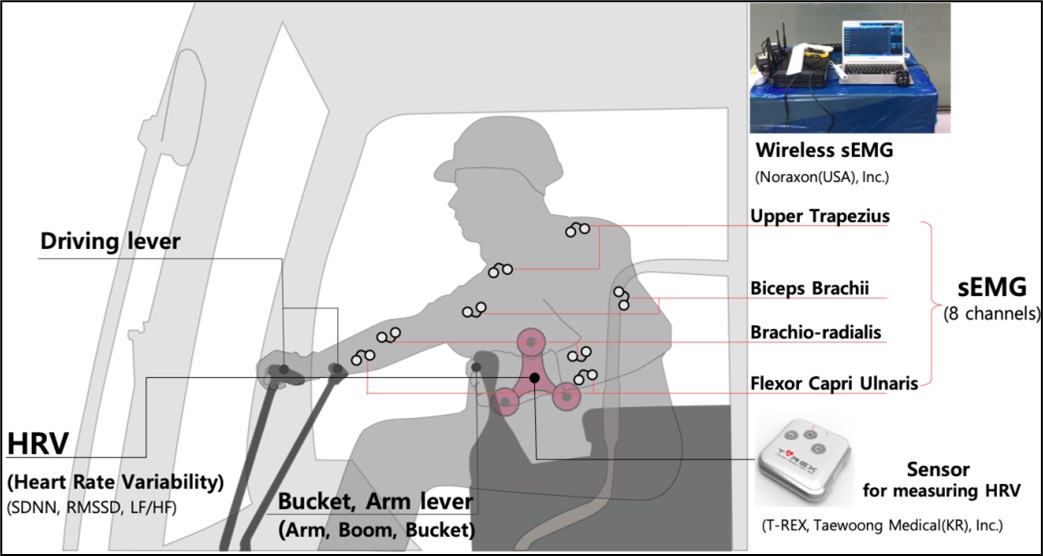
신체적 · 정신적 작업 부하 평가는 심박변이도(HRV)와 근전도(sEMG) 측정을 통해 수행되었다. HRV는 작업자의 정신적 스트레스 수준을 평가하기 위한 지표로 사용되었으며, 왼쪽 흉부 하단에 단일 센서(Taewoong Medical, Korea)를 부착하여 데이터를 수집하였다. 작업자의 근 피로도(Muscle fatigue)를 분석하기 위한 근전도 측정(sEMG)을 위해 Noraxon (USA)사의 장비를 사용하였으며, 상지 4개 근육(Upper Trapezius, Biceps Brachii, Flexor Carpi Ulnaris, Brachioradialis)에 좌 · 우 각각 무선 sEMG 전극(총 8채널)을 부착하였다(Figure 4).
실험의 독립변수는 두 가지 작업 과업(① '경사로 주행', ② '굴삭 및 상차')으로 설정하였으며, 작업 수행시간은 목표한 경사로 주행과 굴삭 및 상차 작업을 완료한 시간으로 정의하였다. 종속변수는 HRV의 R-R 간격을 기반으로 한 정신적 스트레스 지표(SDNN/ms, RMSSD, LF/HF ratio)와 근전도 기반 근 피로도 지표인 ZCR 감소 비율로 설정하였다.
작업 수행을 종료한 피험자를 대상으로 멀미, 소음, 진동, 충격으로 인한 스트레스와 전반적인 작업에 대한 스트레스 정도에 리커트 7점 척도로 설문을 수행하였고, 작업 간 차이를 평가하기에는 한계가 있으나 피실험자의 주관적 스트레스 정도에 대한 보조 지표로 활용하였다. 정성적 스트레스에 대한 설문 항목은 다음과 같다. ① 멀미로 인한 스트레스를 느꼈다. ② 소음으로 인한 스트레스를 느꼈다. ③ 진동으로 인한 스트레스를 느꼈다. ④ 충격으로 인한 스트레스를 느꼈다. ⑤ 작업 수행에 대하여 전반적으로 스트레스를 느꼈다.
2.3 Analysis
실험에서 독립변수는 ① '경사로 주행', ② '굴삭 및 상차' 작업으로 설정하였고, 심박변이도 분석에서는 초기 값과의 비교를 위해 '작업 전 상태(Before Task)'의 조건을 추가하여 분석하였다. 종속변수는 정신적 스트레스를 나타내는 HRV의 R-R Interval 값의 ① 'SDNN/ms', ② 'RMSSD', ③ 'LF/HF ratio' 그리고 근 피로도 분석은 저주파 증가를 나타내는 ③ 'ZCR 감소 비율'로 설정하였다.
Data analysis
굴삭기 작업자의 스트레스를 나타내는 지표들은 30Hz로 측정된 HRV의 R-R interval 데이터를 5분 단위로 샘플링하여, SDNN, RMSSD, LF/HF ratio를 분석하였다. SDNN과 RMSSD는 스트레스에 대한 대응력과 회복력을 나타내는 지표로 지표들의 저하는 부교감신경의 저하로 인한 스트레스 상태를 나타냄으로 이에 대한 감소율을 스트레스 증가로 분석하였다. 태스크 시나리오에 따라 ① 작업 전(Before Task), 경사로 주행(Driving Slop), 굴삭 및 상차(Excavation Loading) 이렇게 3가지 태스크로 구분하여, 태스크 별 평균 값과 작업 전 데이터와 비교한 스트레스 증가율을 비교 분석하였다.
굴삭기 작업자의 근전도 데이터를 1,000Hz로 측정하였고, 'myoMuscle' (Noraxon (USA), Inc.), 분석 소프트웨어를 활용하여, 근 피로도를 분석하였다. 근전도 데이터 분석절차는 다음과 같다. Band pass filtering, ECG reduction을 수행하였고, 근전도의 저주파 영역으로 이동을 나타내는 'ZCR' 감소 비율을 분석하였다. ZCR 슬로프 초기 값(3초) 대비 후기 값(3초) 감소한 비율(difference (%)) 기준으로 분석하였다. 초기 값 대비 감소하지 않은 데이터의 경우에는 근 피로가 발생하지 않은 것으로 간주하여 근 피로도를 0%로 분석하였다. 그리고 좌 · 우 근육의 피로도 평균 값을 통해 각 근육의 피로도를 분석하였다.
5가지 설문 항목에 대한 주관적 스트레스 결과는 평균과 표준편차를 분석하여, 백분율로 환산하여 결과 분석하였다. 정량적 스트레스 평가 결과 해석을 위한 보조적인 지표로 활용하였다.
Statistical analysis
HRV 결과는 시나리오를 크게 3가지로 구분하여 '대기 상태', '경사로 주행', '굴삭 및 상차'에서 세 가지 종속변수 'SDNN', 'RMSSD', 'LF/HF ratio'들의 평균 비교를 위해 일원배치 분산분석을 수행하였다. 근 피로도의 결과는 4가지 근육에서의 피로도 값을 '경사로 주행', '굴삭 및 상차' 작업을 독립변수로 하여, 유의수준은 0.05로 설정하여 일원배치 분산분석을 수행하였다. 본 연구의 통계분석은 IBM SPSS Statistics를 활용하여 수행하였다.
3.1 Results of stress index
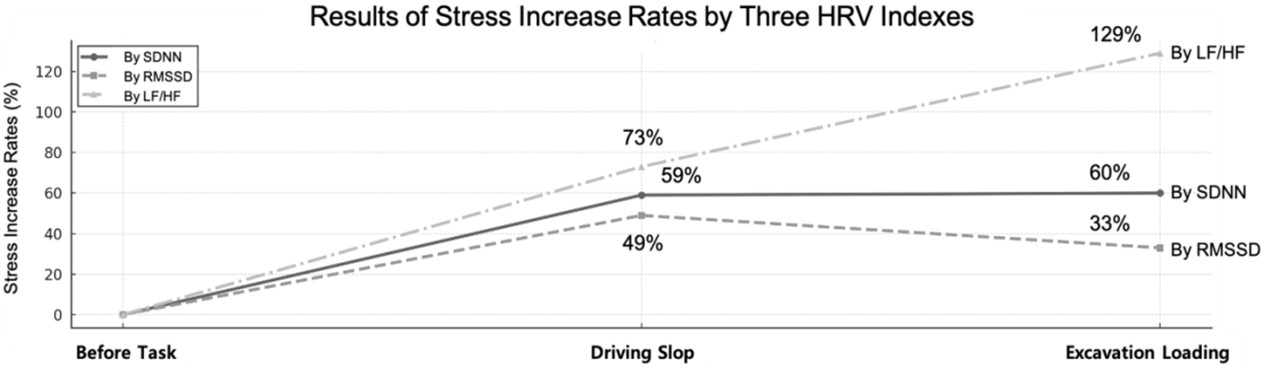
심박변이도(HRV) 분석 결과, 세 가지 지표(SDNN, RMSSD, LF/HF ratio) 모두에서 스트레스가 상승하는 경향이 확인되었으며, 지표 간 유사한 경향성을 보였다. 3가지 변수와 10명의 대상자 모두 작업 전에 비해서는 스트레스 비율이 증가하는 경향을 나타냈으며, 작업자 별로는 작업 전(Before Task)에 비해 경사로 작업(Driving Slop)에서 스트레스가 증가하였다가 이후 굴삭 및 상차(Excavation Loading)에서는 경사로 작업에 비해서 다소 감소하는 경향을 나타내는 대상자와 점점 증가하는 경향을 나타내는 작업자로 두 가지 유형으로 나타났으며, 스트레스 증가율의 평균 값은 SDNN과 LF/HF ratio에서는 에서는 점점 증가하였고, RMSSD에서는 스트레스가 증가하였다가 굴삭 및 상차 작업에서는 스트레스가 다소 감소하는 것으로 나타났다(Figure 5, 6).
시나리오를 3가지 태스크로 구분한 스트레스 증가에 대한 평균 비교 결과에서는 3가지 지표들 모두에서 태스크 전(Before Task)에 비교하여, 스트레스가 상승하는 결과가 나타났다(Figure 5, 6).
Result of SDNN
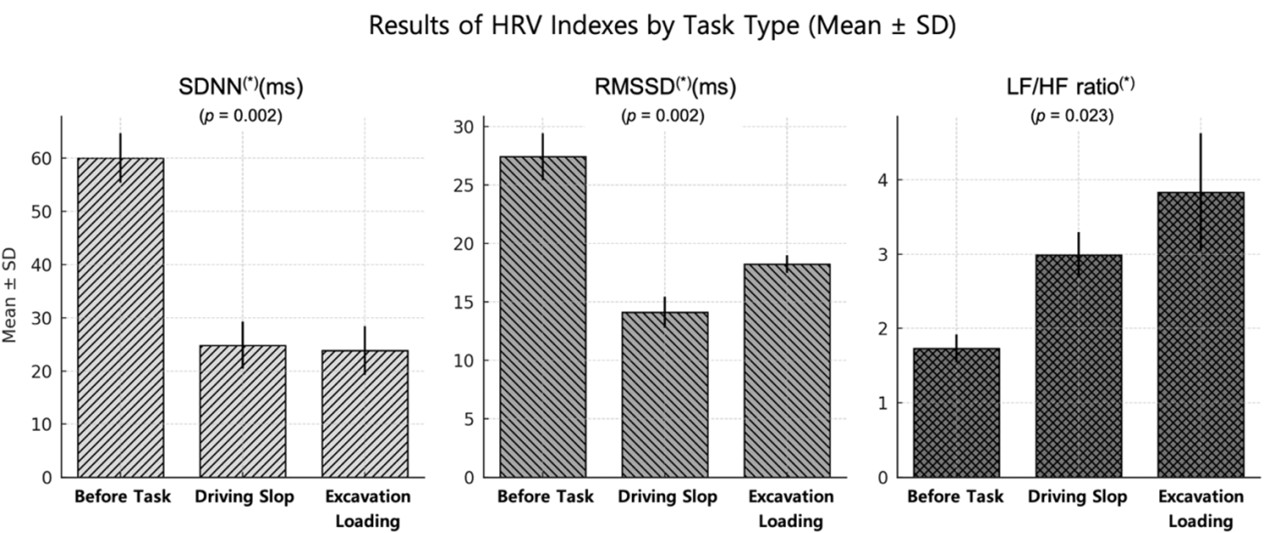
스트레스에 대한 대응력을 나타내는 SDNN 지표의 결과 값은 태스크 전(Before Task) 57.41(±7.02)ms에서 경사로 주행 시(Driving Slop) 32.25(±3.09)ms, 굴삭 및 상차(Excavation Loading)에서는 30.48(±4.61)ms로 감소한 것으로 나타났다. 분산분석 결과 유의수준(p = 0.002)이 0.05 이내에서 태스크 전과 비교하여 유의한 차이가 나타났다(Figure 5).
태스크 전과 비교하여 스트레스의 증가 정도를 분석한 결과에서는 경사로 주행 태스크에서는 59% 증가하였고, 굴삭 및 상차 태스크에서는 60% 증가한 것으로 나타났다(Figure 6).
Result of RMSSD
스트레스에 대한 회복력을 나타내는 RMSSD 지표의 결과 값은 태스크 전 23.97(±1.24)ms에서 경사로 주행 시 14.48(±2.00)ms로 감소하였고, 굴삭 및 상차에서는 18.24(±1.19)ms으로 나타났다. 분산분석 결과 유의수준(p = 0.002)이 0.05 이내에서 태스크 전과 비교하여 유의한 차이가 나타났다(Figure 5).
태스크 전과 비교하여 스트레스의 증가 정도를 분석한 결과에서는 경사로 주행 태스크에서는 49% 증가하였고, 굴삭 및 상차 태스크에서는 33% 증가한 것으로 나타났다(Figure 6).
Result of LF/HF ratio
스트레스와 긴장상태를 나타내는 LF/HF ratio 지표의 결과 값은 태스크 전 1.97(±0.23)에서 경사로 주행 시 3.03(±0.33)으로 증가하였고, 굴삭 및 상차 태스크에서는 2.55(±0.23)으로 나타났다. 분산분석 결과 유의수준(p = 0.023)이 0.05 이내에서 태스크 전과 비교하여 유의한 차이가 나타났다(Figure 5).
태스크 전과 비교하여 스트레스의 증가 정도를 분석한 결과에서는 경사로 주행 태스크에서는 73% 증가하였고, 굴삭 및 상차 태스크에서는 129% 증가한 것으로 나타났다(Figure 6).
3.2 Results of muscle fatigue
근전도의 ZCR(0 값을 지나는 횟수: 주파수를 나타냄) 감소 비율을 통해 분석된 근육 피로도는 2가지 작업(경사로 주행, 굴삭 및 상차)와 4가지 근육(Upper trapezius, Biceps brachii, Flexor capri ulnaris, Brachio-radialis) 모두에서 피로도가 나타났다. 특히 경사로 주행에서 'Upper Trapezius'의 근 피로도가 41.74(±9.86)%로 가장 높게 나타났다. 경사로 주행 태스크에서는 상완의 근육들이(Upper Trapezius: 41.74%, Biceps brachii: 21.20(±7.63)%) 높게 나타났으며, 굴삭 및 상차 태스크에서는 전완의 근육들이(Flexor capri ulnaris: 14.85(±8.75)%, Brachio-radialis: 16.61(±12.65)%) 상대적으로 높게 나타났다(Figure 7).
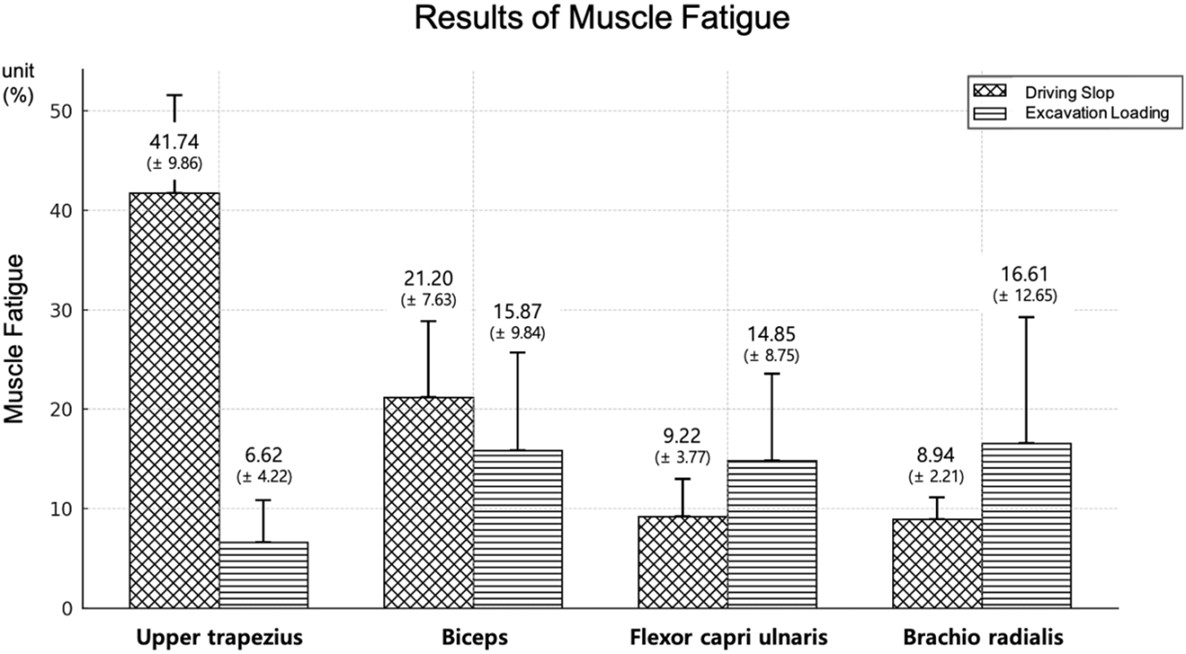
경사로 주행과 굴삭 및 상차 조건에서 근 피로도 차이의 분산분석 결과에서는 유의수준 0.05 범위 내에서는 Upper trapezius만 조건 별 유의한 차이(p = 0.003)가 확인되었다.
3.3 Results of subjective stress
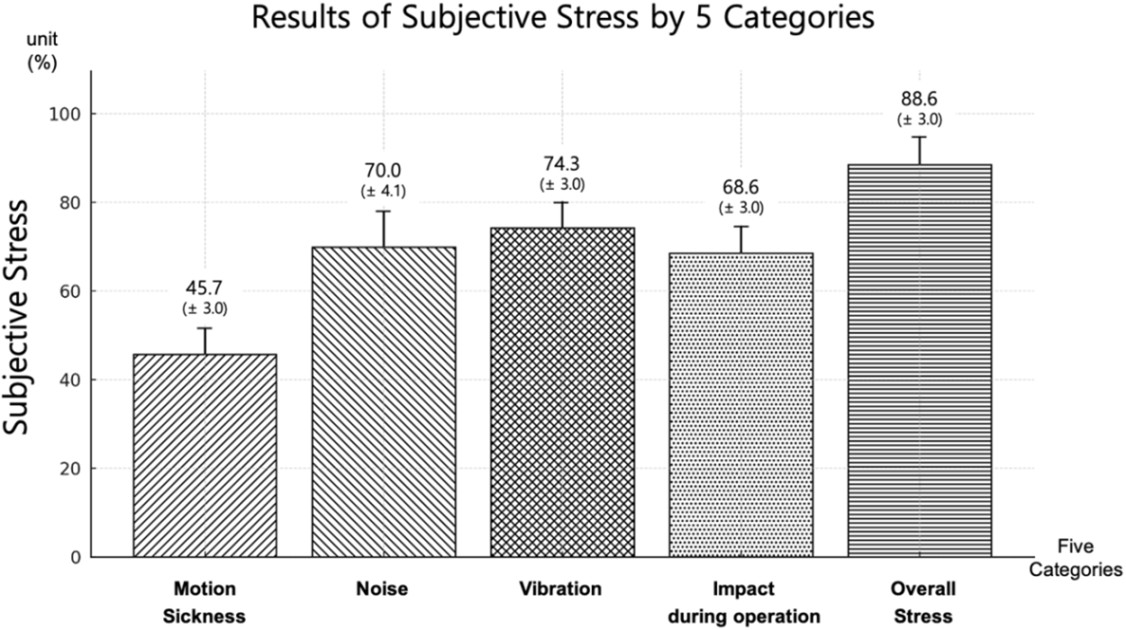
작업 부하 평가를 위하여 시뮬레이션 작업 수행 이후 5가지 항목, 멀미(Motion Sickness), 소음(Noise), 진동(Vibration), 충격(Impact during operation), 전반적인 스트레스(Overall Stress)에 대한 평가를 7점 척도로 수행하였고, 결과를 백분율로 변환하여 분석하였다. 주관적 스트레스 평가 결과, 전반적인 스트레스 수준은 88.6(±3.0)%로 가장 높게 나타났으며, 소음은 70.0(±4.1)%, 진동은 74.3(±3.0)%, 충격은 68.6(±3.0)%로 나타났다. 멀미에 대한 스트레스는 45.7(±3.0)%로 가장 낮게 나타났다(Figure 8).
본 연구는 굴삭기 작업자의 작업 부하를 정량화하기 위해, 시뮬레이터 환경에서 작업 시나리오 별 심박변이도(HRV) 및 근전도(EMG) 분석을 수행하였다. 분석 결과는 크게 두 가지로 구분되며, 첫째는 정신적 부하(Stress Index)에 대한 HRV 기반 분석이고, 둘째는 근전도 기반 근 피로도 분석이다.
(Figure 5)의 HRV 결과는 작업자별 경향 분석을 위한 시계열 그래프로, 초기 스트레스 수준 및 과업 시간에 따른 차이가 존재해 직접 비교에는 한계가 있다. 이에 따라 평균 비교 및 정규화된 데이터를 활용해 작업 별 5분 단위 스트레스 지표를 도표화 하였다(Berntson et al., 2005; Wang and Huang, 2012). 특히 단기 작업 스트레스 분석에 유용하다고 보고된 SDNN (Balocchi, 2006)을 중심으로, RMSSD 및 LF/HF ratio과 함께 분석을 수행하였다. 임상적으로 SDNN은 스트레스에 대한 대응력을 나타내는 지표로 활용되며, RMSSD는 스트레스에 대한 회복력을 나타내는 지표이다. 그리고 LF/HF ratio 증가는 교감신경이 우위를 보이며, 스트레스와 긴장 상태를 나타내는 지표이다. 본 연구 분석 결과, 작업 전 상태에서 SDNN은 57.41ms로 정상 범위(50~100ms), RMSSD는 23.97ms로 보통 수준(20~50ms), LF/HF는 1.97로 정상 범위(0.5~2.0)에 해당하였다. 그러나 두 작업(Task) 수행 후 SDNN 및 RMSSD는 모두 감소하였으며, LF/HF 비율은 증가하였다. 이는 스트레스에 대한 대응력과 회복력이 모두 저하되고 교감신경 활동이 우위를 보이며, 전반적인 정신적 스트레스가 증가했음을 의미한다.
특히 '굴삭 및 상차' 과업에서 '경사로 주행'보다 더 높은 정신적 부하가 나타났다. 참여자 인터뷰에서도 상차 작업의 정확도 요구가 높고 실제보다 어렵게 느껴졌다는 피드백이 있었으며, 이는 부하 증가와 관련이 있다. 일부 작업자에게서는 스트레스가 오히려 감소하기도 했는데, 이는 과업 수행에 따른 성취감의 영향으로 해석된다. 선행연구(Aalmo et al., 2016; Magagnotti et al., 2016)에서도 확인되었듯, 성취감은 스트레스 반응에 영향을 미치며, 이 역시 본 연구 참여자에게서 일부 관찰되었다. 이는 본 연구의 평가 시나리오가 단발성 과업이 아닌 지속적인 반복 과업을 기반으로 하였고, 이는 결과적으로 작업자에게 실질적인 스트레스를 유도할 수 있었다.
HRV와 시뮬레이터를 활용한 정신적 부하 정량화에 대해 기존 연구들은 긴급 상황이나 사고 대처 과업에서는 실제 스트레스 반응을 충분히 반영하지 못한다고 지적한다(Veltman and Gaillard, 1996). 이는 작업자가 실제 상황이 아닌 시뮬레이션이라는 점을 인지하기 때문으로 분석된다. 따라서 본 연구에서는 시뮬레이터를 활용한 HRV 분석 결과를 보조할 수 있는 주관적 스트레스 정도에 대한 정성평가를 함께 수행하였다. 정성평가 결과에서도 HRV 기반의 정량적 평가 결과를 뒷받침할 수 있는 결과가 나타났다. 전반적인 스트레스가 88.6%로 가장 높게 나타났으며, 피험자들의 개별적인 감각 요소에 대한 스트레스 항목인 소음은 70.0%, 진동은 74.3%, 충격은 68.6%로 중간 정도의 스트레스로 나타났다. 이는 전반적인 작업 수행으로 인한 실질적인 작업 부담이 스트레스 평가에 가장 큰 영향을 미친 것으로 판단된다. 또한 멀미로 인한 스트레스 정도는 45.4%로 가장 낮게 나타났으며, 이는 시뮬레이터의 시각 · 동작 구성 요소가 현기증이나 멀미 등을 유발할 가능성이 적은 비교적 안정적인 환경임의 의미하며, 가상 환경에서 멀미를 경험하지 않은 피실험자를 대상으로 평가를 수행한 결과로 해석된다.
시뮬레이터 기반 환경은 조작성과 스트레스를 평가하는데 유익하나 멀미(motion sickness) 유발 요소에 대한 정밀한 재현에는 한계가 존재한다(Watanabe et al., 2025). 본 연구의 활용된 시뮬레이터 환경은 실제 굴삭기 동작 대비 주행모드는 90.2%, 굴삭 및 상차는 75.9%의 정확도로 평가되었다. 이와 같은 모사 환경에서 멀미로 인한 문제를 보조해석하기 위하여 정성평가 항목에서 수행한 멀미에 대한 평가에서는 멀미로 인한 스트레스는 낮게 나타났다. 이와 같은 한계점이 미치는 영향에도 불구하고 본 연구의 결과는 시뮬레이터 기반 작업 시나리오 설계 및 정신적 부하 측정 방식은 실제 설계 변수 평가에 활용될 수 있는 가능성을 제시하였다. 따라서 건설기계 작업 시나리오를 설계한 후 정신적 부하량을 측정하는 방법으로 시뮬레이터를 활용하는 방법이 건설기계 작업대 설계, 컨트롤러 개발 등의 설계 요소 평가에 유용하게 활용될 수 있을 것으로 판단된다.
근전도 측정을 통한 작업자의 근 피로도를 분석한 결과에서는 경사로 주행과 굴삭 및 상차에 대한 4가지 근육들의 피로도를 분석하였다. 굴삭기는 주행과 굴삭 및 상차 작업에 사용한 조작기가 다른 형태로 다른 위치에 구성되어있다. 주행은 작업자 전방에 위치한 주행레버를 조작하게 됨에 따라 상체를 숙인 자세 주로 어깨와 상완의 근육을 활용하며, 굴삭 및 상차 작업에서는 작업자의 좌우의 조이스틱을 활용하여, 굴삭기의 'Arm'과 'Boom', 'Bucket'을 조작하므로 주로 전완의 근육들을 사용하게 된다(Figure 4). 이와 같은 주행과 굴삭 작업별 조작 특성에 따라 본 연구의 근 피로도 분석 결과도 주행 작업인 '경사로 주행'에서는 어깨 근육인 Upper trapezius와 상완에 해당하는 Biceps brachii 피로도가 높게 나타났다. 그리고 '굴삭 및 상차' 작업에서는 전완 근육에 해당하는 Flexor capri ulnaris, Brachio-radialis의 피로도가 높게 나타났다. 따라서 근 피로도 분석 결과도 굴삭기 작업자의 태스크 별 특성을 반영한 결과로 도출된 것을 확인할 수 있었다.
최근 굴삭기를 포함한 건설기계의 기술 개발은 기존의 진동, 소음, 충격 중심에서 벗어나, 작업자의 조작성 향상 및 근골격계 질환 예방 등을 위한 인간 중심적 기술로 전환되고 있다. 이에 따라 사용성 평가, UI/UX 설계, 작업자 중심의 캐빈 디자인 등 다양한 연구가 활발히 이루어지고 있다.
그러나 실제 건설기계 작업 환경을 반영한 평가 프로토콜 개발이나 시나리오 구현은 공간, 시간, 인력 등의 제약으로 인해 연구 수행이 쉽지 않다. 이러한 한계를 보완하기 위한 방안으로, 최근에는 시뮬레이터를 활용한 부품 성능 평가 및 실차 개발이 활발히 이루어지고 있다.
시뮬레이터 기반 연구에 대해 '실제 상황과의 괴리', '집중력 저하로 인한 정신적 부하 반영 한계' 등의 지적이 있어 왔지만, 이는 대부분 단순 운전 시뮬레이션 연구에 해당한다. 본 연구에서는 운전뿐 아니라 반복적이고 지속적인 작업 과업(Task)을 기반으로, 심박변이도(HRV)를 통한 정신적 부하 분석과 근전도(sEMG)를 통한 근 피로도 분석을 수행하였다.
이를 통해 '경사로 주행'과 '굴삭 및 상차' 두 가지 작업에 대해 작업 부하의 특성을 비교 분석하였고, 시뮬레이터 기반의 정량적 작업 부하 측정이 건설기계 설계 평가에 유용하다는 가능성을 확인할 수 있었다. 또한, 참여자 섭외의 현실적 어려움으로 인해 굴삭기 운전 자격증 보유 및 1년 이상 경력을 가진 작업자를 선정하였으며, 선행연구(Lewis, 1994; Lewis and Sauro, 2006)에 따라 최소 10명 이상의 인원을 대상으로 실험을 수행하였다.
본 연구는 건설기계 및 굴삭기 작업자의 정신적 · 신체적 작업 부하를 시나리오 기반으로 정량화하기 위한 방법론을 제시한 것이다. 다만, 시뮬레이터 기반 평가 결과가 실제 작업 환경에서의 작업 부하와 어느 정도 일치하는지에 대한 비교 데이터가 부족하다는 점은 본 연구의 제한점으로 판단된다. 시뮬레이터의 민감도 및 평가 타당성을 확보하기 위해서는, 향후 연구에서 실제 건설기계 작업 환경과의 작업 부하 비교 분석 연구 및 다양한 환경 조건과 작업 시나리오를 반영한 확장 연구가 필요하다.
본 연구는 다양한 작업 시나리오를 기반으로 사용자 중심 설계 요소를 도출하고, 이를 통해 작업자 친화적인 건설기계 및 굴삭기 개발에 기여할 수 있을 것으로 기대된다.
References
1. Aalmo, G.O., Magagnotti, N. and Spinelli, R., Forest workers and steep terrain winching: the impact of environmental and anthropometric parameters on performance, Croatian Journal of Forest Engineering, 37(1), 97-105, 2016.
Google Scholar
2. Adarsh Kumar, A.K., Puneet Mahajan, P.M., Dinesh Mohan, D.M. and Varghese, M., Tractor Vibration Severity and Driver Health: a Study from Rural India, Journal of Agricultural Engineering Research, 80(4), 313-328, 2001.
Google Scholar
3. Akyeampong, J., Nevins, L. and Udoka, S., Using digital human modeling to enhance work visibility for excavator, Industrial and Systems Engineering Research Conference, 2013.
Google Scholar
4. Alphin, M.S, Sankaranarayanasamy, K. and Sivapirakasam, S.P., Experimental Evaluation of Whole Body Vibration exposure from Tracked Excavators with Hydraulic Breaker Attachment in Rock Breaking operations, Journal of Low Frequency Noise, Vibration and Active Control, 29(4), 101-110, 2010.
Google Scholar
5. Balocchi, R., Cantini, F., Varanini, M., Raimondi, G., Legramante, J.M. and Macerata, A., Revisiting the potential of time-domain indexes in short-term HRV analysis, Biomedizinische Technik, 51(4), 190-193, 2006.
Google Scholar
6. Benjamin, O.Y., Mark, E., Xiaochun, J., Wayne, B. and Park, E., Usability Evaluation of a Coordinated Excavator Controller with Haptic Feedback, Proceedings of the 2010 Industrial Engineering Research Conference, 2010.
Google Scholar
7. Berntson, G.G., Lozano, D.L. and Chen, Y.J., Filter properties of root mean square successive difference (RMSSD) for heart rate, Psychophysiology, 42(2), 246-252, 2005.
Google Scholar
8. Byun, S.T. and Ryu, S.Y., A study on the improvement of work vision of heavy construction equipment; Focusing on excavators, Archives of Design Research Spring Conference, 64-65, 1998.
9. Elton, M.D., An Efficient Haptic Interface for a Variable Displacement Pump Controlled Excavator, Master's thesis. Mechanical Engineering, Georgia Institute of Technology, 2009.
10. Giuseppe, A., Giorgio, C.S., Marco, R. and Antonio, P., Method for the analysis of posture and interface pressure of car driver, Applied Ergonomics, 33, 511-522, 2002.
Google Scholar
11. Hayn, H. and Schwarzmann, D., A haptically enhanced operational concept for a hydraulic excavator, In: Zadeh, M.H. (Ed.), Advances in Haptics, 199-220, 2010.
Google Scholar
12. Hughes, K. and Jiang, X., Using discrete event simulation to model excavator operator performance, Human Factors and Ergonomics in Manufacturing & Service Industries, 20(5), 408-423, 2010.
Google Scholar
13. Inbar, G.F., Paiss, O., Allin, J. and Kranz, H., Monitoring surface EMG spectral changes by the zero crossing rate, Medical and Biological Engineering and Computing, 24(1), 10-18, 1986.
Google Scholar
14. Infrastructure Health and Safety Association (IHSA), Mounting and dismounting from vehicle, Construction Health and Safety Manual, 30-31, 2017. https://www.ihsa.ca/rtf/health_safety_manual/pdfs/hazards/Mounting.pdf
15. Jang, E.H., Kim, A.Y. and Yu, H.Y., Relationships of Psychological Factors to Stress and Heart Rate Variability as Stress Responses Induced by Cognitive Stressors, Science of Emotion & Sensibility, 21(1), 71-82, 2018.
16. Jang, W.S., Analysis about Stress Index and Resistance of Workers by Heart Rate Variability, Korean Journal of Oriental Physiology & Pathology, 25(4), 728-733, 2011.
17. Jung, S.W. and Jung, E.C., Design for a control instrument of excavators cabin by using a 3-dimensional human model, Archives of Design Research fall Conference, 36-37, 1999.
18. Kim, G.M. and Woo, J.M., Determinants for heart rate variability in a normal Korean population, Journal of Korean Medical Science, 26(10), 1293-1298, 2011.
Google Scholar
19. Kim, H., Lee, J. and Kim, J., Electromyography-signal-based muscle fatigue assessment for knee rehabilitation monitoring systems, Biomedical Engineering Letters, 8(4), 345-353, 2018.
Google Scholar
20. Kuijt-Evers, L.F.M., Krause, F. and Vink, P., Aspects to improve cabin comfort of wheel loaders and excavators according to operators, Applied Ergonomics, 34, 265-271, 2003.
Google Scholar
21. Lee, J., Seo, H., Jeon, S., Park, S.K., Bang, J.H., Hwang, Y.B. and Im, K.B., Effect of Stress Level and Stress Vulnerability of Workers on Heart Rate Variability, Korean Journal of Psychosomatic Medicine, 30(1), 7-15, 2022.
Google Scholar
22. Lewis, J. and Sauro, J., When 100% really isn't 100%: Improving the accuracy of small-sample estimates of completion rates, Journal of Usability Studies, 1(3), 136-150, 2006.
Google Scholar
23. Lewis, J.R., Sample sizes for usability studies: Additional considerations, Human Factors, 36, 368-378, 1994.
Google Scholar
24. Magagnotti, N., Aalmo, G.O., Brown, M. and Spinelli, R., A new device for reducing winching cost and worker effort in steep terrain operations, Scandinavian Journal of Forest Research, 31(6), 602-610, 2016.
Google Scholar
25. Oh, K.W., Kim, D.N. and Hong, D.H., Performance Evaluation of Excavator Control Device with EMG-based Fatigue Analysis, International Journal of Precision Engineering and Manufacturing, 15(2), 193-199, 2014.
Google Scholar
26. Park, C.G., Yoo, S., Ahn, H., Kim, J. and Shin, D., A coupled hydraulic and mechanical system simulation for hydraulic excavators. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 234(4), 527-549, 2020.
Google Scholar
27. Peppoloni, L., Filippeschi, A., Ruffaldi, E. and Avizzano, C.A., A novel wearable system for the online assessment of risk for biomechanical load in repetitive efforts, International Journal of Industrial Ergonomics, 52, 1-11, 2016.
Google Scholar
28. Veltman, J.A. and Gaillard, A.W.K., Physiological indices of workload in a simulated flight task, Biological Psychology, 42(3), 323-342, 1996.
Google Scholar
29. Vito, M.M., Antonio, E.U., Michele, F., Vitoantonio, B., Gianpaolo, F.T. and Giuseppe, M., Real time RULA assessment using Kinect v2 sensor, Applied Ergonomics, 65, 481-491, 2017.
Google Scholar
30. Watanabe, H., Ujike, H., Matsumura, Y. and Okuda, K., Visually Induced Motion Sickness During Tele-Operation of an Excavator Simulator: Effects of Virtual Reality Devices and Operation Delay, Journal of Robotics and Mechatronics, 37(3), 648-665, 2025.
Google Scholar
31. Wang, H.M. and Huang, S.C., SDNN/RMSSD as a Surrogate for LF/HF: A Revised Investigation, Modelling and Simulation in Engineering, 2012.
Google Scholar
32. Yoon, J.P. and Munn, M.K., A study on Design Trend of Hydraulic Excavator since 1990, Korean Society of Design Science Spring Conference, 1999.
33. Zimmermann, C.L., Cook, T.M. and Rosecrance, J.C., Work-related musculoskeletal symptoms and injuries among operating engineers: a review and guidelines for improvement, Applied Occupational and Environmental Hygiene Abbreviation, 12(7), 480-484, 1997.
Google Scholar
PIDS App ServiceClick here!