eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Gayoung Ryu
, Yulim Kim
, Yong Gu Ji
, Young Woo Kim
10.5143/JESK.2025.44.5.541 Epub 2025 November 05
Abstract
Objective: This study investigates how an AI companion robot's interaction proximity and face-to-face behavior affect user experience in home environments.
Background: AI companion robots have advanced to fulfill both functional and social roles, including the delivery of personalized information. These robots commonly operate in close proximity to users, utilizing visual and auditory modalities for communication. However, the unique characteristics of home and personal environments can substantially impact user experience and acceptance. A thorough understanding of user perceptions of robot behavior in such contexts is essential for the design of effective human–robot interactions.
Method: A within-subjects experiment was conducted with 40 participants. Robot interaction was manipulated in a 2 × 2 design varying proximity (close, distant) and orientation (user-facing, wall-facing). After interacting with a robot that presented weather and schedule information, participants completed questionnaires measuring perception, acceptance, closeness, user experience, and intention to use. Follow-up interviews were conducted to collect qualitative feedback.
Results: Face-to-face interactions at close proximity received the highest ratings for intimacy, likability, personification, and social presence. In contrast, distant, wall-facing interactions were perceived as more professional and less distracting. The higher the age group, the more participants preferred human-like qualities such as eye contact, whereas younger participants valued efficiency and the robot's functional role. Comfort and intention to use were generally rated positively.
Conclusion: The interaction of AI companion robots is effective in building intimacy at close range, but more suitable for delivering information and minimizing distraction at a distance.
Application: These findings highlight the need to develop context-aware, user-tailored interaction strategies for social robots designed for home environments.
Keywords
AI companion robot Home robotics Human–robot interaction User experience Interaction distance Orientation
The social behavior of robots has long been a focus in robotics, with their ability to interact with humans evolving beyond basic tasks. In the social dimension, robots engage with humans through gestures, facial expressions, communication, emotions, and language (Blut et al., 2021; Brandl et al., 2016; Breazeal, 2003; Breazeal et al., 2016; Dautenhahn, 1995; Fong et al., 2003; Henschel et al., 2021; Sarrica et al., 2020). Robots are categorized into various forms, such as task type (e.g., walking assistance, delivery) and robot morphology (e.g., human, animal) (Yanco and Drury, 2004). Based on their morphology, robots can foster emotional bonds with humans or perform specific tasks, such as guiding users to information or managing household responsibilities. The emotional quality of human–robot interaction has been explored in many studies, addressing factors such as acceptance (Bröhl et al., 2016; Goodrich and Schultz, 2008; Yanco and Drury, 2004). Safety (De Santis et al., 2008; Lasota et al., 2017) and likability (Kim et al., 2019; Letheren et al., 2021; Li et al., 2010; Salem et al., 2013). Social robots have already assumed social roles and become physically embodied, with users expecting usability and positive experiences based on the robot's purpose and context.
The social development of robots is shifting from performing domain-specific tasks such as those in education, healthcare, and eldercare toward the ability to actively adapt to human contexts and environments to carry out tasks autonomously (Robinson et al., 2014). The social capabilities of these robots are expanding beyond narrow applications, enabling them to identify appropriate actions and execute tasks independently. In particular, the concept of companionship is evolving to address human emotional needs and enhance quality of life through affective interactions in social settings. Social robots that serve as companions foster intimate bonds with users, increasing trust and a sense of safety (Becker et al., 2007; Strohmann et al., 2023). AI companion robots serve both social and functional roles: socially, they help foster intimacy and communication with users; functionally, they detect human activities and perform relevant tasks. When deployed in home environments for personal use, AI companion robots may act as personal assistants or partners (Aleksander, 2017; Kim et al., 2021; Montemerlo et al., 2002; Ray et al., 2008). Social aides (Cooper et al., 2020; Scopelliti et al., 2005; Wada and Shibata, 2007), or providers of personalized information, thereby facilitating the development of relational bonds between the robot and the user.
1.1 Social interaction and AI companion robots
Socially interactive robots address the psychological and social needs of users while autonomously performing specific tasks. For example, robotic vacuum cleaners are autonomous systems that navigate and sense their environment independently. IoT-based services, through learning and connectivity, are gradually reducing the need for direct user control (Huang and Rust, 2021). Some robots can actively monitor a user's health or behavioral state and provide paramedical services in response (Góngora Alonso et al., 2019; Koceski and Koceska, 2016; Tsai et al., 2007). Robots have the potential to serve as assistants and tools in a variety of daily activities (Feil-Seifer and Mataric, 2005).
Human–robot interaction offers numerous potential benefits, ranging from basic communication to advanced capabilities shaped by the robot's learning processes (Krämer et al., 2011). AI robots are advancing in their ability to interact and cooperate with humans, thereby enhancing efficiency and improving overall quality of life (Tóth et al., 2022). In particular, robots used within home environments have the potential to support users' daily activities and perform new tasks that were previously unavailable, owing to their ability to execute a wide range of functions (Smarr et al., 2014). In these settings, robots will expand their roles as companions, providing users with daily information and carrying out simple tasks. Since home environments are utilized differently depending on individual lifestyles, it is essential to consider the surrounding context and the user's field of vision when presenting information.
1.2 Robot proximity and orientation
In home environments, personal empathic experiences are essential. Robots positioned within a social distance of approximately 2.0m, rather than an intimate distance of less than 0.5m, have been shown to enhance comfort, trust, and likability (Gurung et al., 2021; Siebert et al., 2020). However, within personal spaces, the robot's approach direction or gaze behavior may lead to negative user experiences depending on the context (DiSalvo, 2002; Lindblom et al., 2020; Mori et al., 2012). While face-to-face interactions with robots easily capture the user's visual attention, they can also evoke feelings of threat or discomfort. Furthermore, rapid approaches by robots may induce anxiety and stress in users (Brandl et al., 2016). These effects, however, may vary depending on the robot's size, morphology, operational space, and intended function.
This study examines how the approach distance and face orientation of an AI companion robot influence user experience in home environments. It particularly focuses on the effects of these factors when the robot delivers information through projection. Since the home is a private and protected space, the robot's approach and orientation can significantly shape user experience. Accordingly, this study addresses the following research questions:
- RQ1. How does the robot's approach distance, including user proximity and wall proximity, affect user experience in a home environment?
- RQ2. How does the robot's orientation, including user facing and wall facing, affect user perception when delivering projected information in home environments?
2.1 Participants
This study was conducted with 40 participants (25 female and 15 male) in a controlled laboratory environment. Participants' ages ranged from their 20s to their 60s, with a mean age of 41.75 years. A broad age range was recruited to reflect the diverse user base of home robots. In particular, older adults, who tend to spend more time at home than younger individuals, were included to better capture their interactions with home robots. Participants were recruited through community postings, social media, and snowball sampling.
2.2 Experimental design
Each participant engaged in four interactions with the robot (Table 1). The experiment employed a 2 × 2 within-subjects design, combining two independent variables: proximity (i.e., user proximity and wall proximity) and orientation (i.e., user orientation and wall orientation). During each interaction, participants asked the robot two questions regarding the weather and their schedule, to which the robot responded by providing the relevant information.
|
Type |
User-proximity |
Wall-proximity |
|
User facing |
UP-UF |
WP-UF |
|
|
|
|
|
Wall facing |
UP-WF |
WP-WF |
|
|
|
|
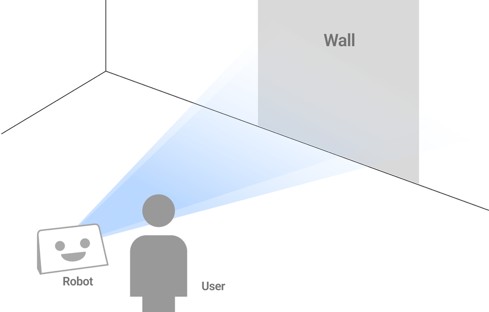
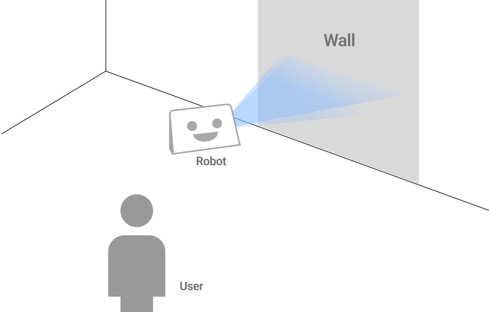
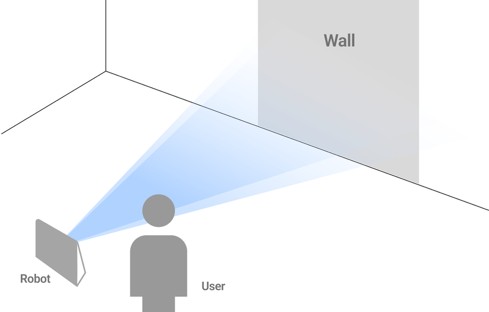
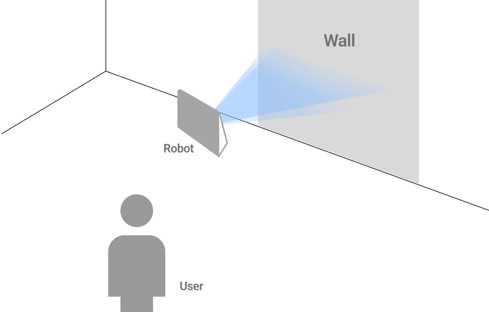
The robot used in the experiment was constructed by attaching an iPad Air 11 to a remote-controlled robotic vacuum cleaner. To create a friendly appearance, the iPad displayed animated facial features, such as eyes and a mouth, to simulate facial expressions (DiSalvo, 2002; Fong et al., 2003) (Figure 1). The robot's movements were controlled using the Wizard-of-Oz method, in which a remote operator manually guided the robot according to a predefined script for each condition. To simulate information delivery in a home environment, the robot was designed to project information onto a wall. In the laboratory setting, an opaque screen was used to represent the wall, and information was projected from behind using a standard projector. The projected content corresponded to the two user questions.

The proximity conditions were determined based on Hall's proxemics theory (Hall et al., 1968). The near condition (user proximity) was set at 45cm, representing an intimate distance, while the far condition (wall proximity) was set at 200cm, falling within the typical range of social distances (120-360cm) and adjusted to reflect a realistic living room environment.
- User Proximity and User Facing (UP-UF): The robot approaches the user and orients itself such that it faces the user while delivering information.
- User Proximity and Wall Facing (UP-WF): The robot approaches the user but orients itself toward the wall when delivering information.
- Wall Proximity and User Facing (WP-UF): The robot approaches the wall (where information is projected) but faces the user while providing the information.
- Wall Proximity and Wall Facing (WP-WF): The robot approaches the wall and also faces the wall while delivering the information.
2.3 Task and procedure
Upon arrival at the laboratory, participants were introduced to the AI companion robot and watched a video demonstrating its use in a home environment. They were then asked to imagine the laboratory as their living room and to sit on chairs arranged for interaction. At the beginning of each experiment, participants asked two questions in a relaxed tone: "How is the weather today?" and "What is my schedule?" In previous studies on household robots, a variety of everyday instructions were examined, including household chores, time reminders (e.g., medication schedules), requests, and personal services. These prior studies were referenced when selecting the questions (Bugmann and Copleston, 2011; Smarr et al., 2014).
The robot moved to the designated location according to the assigned conditions, displayed the relevant information on its screen, and provided a voice response in its own voice. The order of conditions was counterbalanced to control for order effects (Bradley, 1958). After each interaction, participants completed a questionnaire to evaluate their experience. Additionally, a short semi-structured interview was conducted after each task to collect qualitative feedback. The interview questions focused on participants' impressions of the robot, their interaction preferences, and their comparative rankings of the four conditions. The experimental session lasted approximately 60 minutes.
2.4 Data collection and analysis
Participants completed questionnaires assessing perception, presence, closeness, user experience, and intention to use across different combinations of robot proximity and face orientation (Table 2). Godspeed questionnaire was adopted to measure users' perceptions of robots, encompassing the following dimensions: anthropomorphism, animacy, likability, perceived intelligence, and perceived safety. Presence was assessed to evaluate the degree of social presence experienced during interactions with the robot, while closeness was assessed using a single item from the Inclusion of Other in the Self (IOS) scale. User experience focused on participants' sense of comfort during interaction, and intention to use measured their willingness to adopt AI companion robots in future home environments. The questionnaire items for each measure are provided in the Appendix. Data were analyzed using IBM SPSS Statistics, employing a two-way repeated-measures ANOVA. Bonferroni post hoc tests were conducted to examine pairwise differences among the conditions.
2.5 Measurements
Participants completed questionnaires assessing perception, presence, closeness, user experience, and intention to use across different combinations of robot proximity and face orientation (Table 2). To measure users' perceptions of the robot, we adopted Godspeed's scale, which includes the following dimensions: anthropomorphism, animacy, likability, perceived intelligence, and perceived safety. Presence was evaluated to measure the sense of social presence experienced during interactions with the robot. Closeness was assessed using a single item that evaluated the perceived intimacy between the robot and the user. User experience focused on participants' sense of comfort during the interaction. Finally, intention to use was measured by assessing participants' willingness to adopt AI companion robots in home environments in the future.
|
Questionnaire |
Items |
Cronbach's α |
References |
|
|
Godspeed |
Anthropomorphism |
5 |
.95 |
Bartneck et al. (2009) |
|
Animacy |
6 |
.95 |
||
|
Likability |
5 |
.94 |
||
|
Perceived intelligence |
5 |
.96 |
||
|
Perceived safety |
3 |
.94 |
||
|
Social Presence (SP) |
5 |
.94 |
Heerink et al. (2008) |
|
|
Inclusion of Other in the Self (IOS) |
1 |
- |
Aron et al. (1992) |
|
|
Comfort |
6 |
.97 |
Kim
and Mutlu (2014), |
|
|
Willingness to Accept
(WA) |
3 |
.92 |
Gursoy
et al. (2019), |
|
2.6 Data analysis
Survey data were collected using a 7-point Likert scale. Statistical analyses were performed using SPSS. A repeated-measures ANOVA was primarily employed, and a two-way ANOVA was additionally conducted depending on the dependent variable. For questionnaire items that violated the assumption of normality, the Friedman test was applied as a non-parametric alternative. To explore perspectives that were not anticipated by the researchers, post-task interviews were conducted and audio-recorded (Adams and Cox, 2008). The recorded interviews were subsequently transcribed and subjected to thematic analysis using Microsoft Excel.
3.1 Experimental results
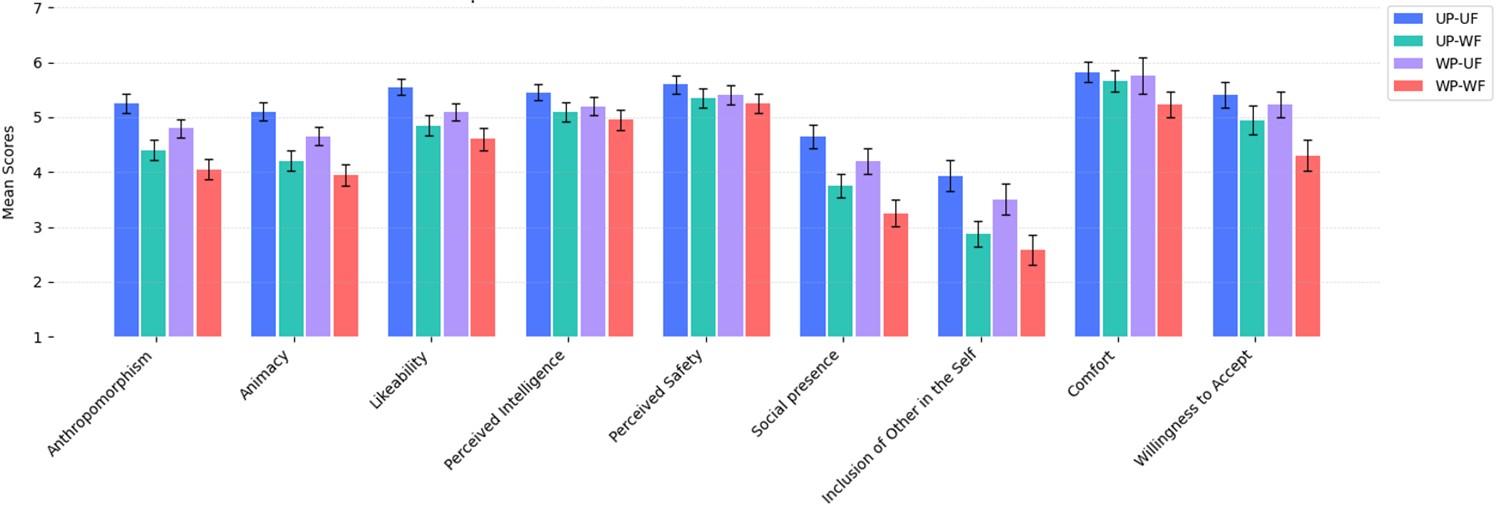
Overall, the condition in which the robot faced the user at close range while providing information was evaluated positively (Figure 2). The comfort dimension consistently received high scores, which may be attributed to the relaxed posture and informal conversational tone commonly observed in home environments. In contrast, the robot received the lowest ratings on the IOS measurement items. A significant difference was found between the condition where the robot faced the user at close range and the condition where it provided guidance from a distance while facing the wall. Participants described close-range, face-to-face interaction as resembling direct conversation, and some mentioned that it felt similar to talking with a friend. Furthermore, non-face-to-face interactions conducted from a distance were evaluated negatively (Table 3).
3.1.1 User perception (godspeed)
The effects of robot-user proximity and face orientation on Godspeed's dimensions anthropomorphism, animacy, likability, perceived intelligence, and perceived safety were partially significant. Analysis results revealed significant main effects for most measures. For anthropomorphism, the main effect of proximity was significant, F(1, 39) = 6.66, p = .014, as was the main effect of orientation, F(1, 39) = 22.99, p < .001. The interaction effect between proximity and orientation was not significant, F(1, 39) = 0.16, p = .692. For animacy, both the main effect of proximity, F(1, 39) = 11.58, p = .002, and the main effect of orientation, F(1, 39) = 20.34, p < .001, were significant. The interaction effect was not significant, F(1, 39) = 0.45, p = .505. For likability, significant main effects were found for proximity, F(1, 39) = 10.42, p = .002, and orientation, F(1, 39) = 7.81, p = .008, whereas the interaction effect was not significant, F(1, 39) = 0.01, p = .913. For perceived intelligence, both the main effect of proximity, F(1, 39) = 4.85, p = .033, and the main effect of orientation, F(1, 39) = 10.90, p = .002, were significant. The interaction effect was not significant, F(1, 39) = 0.03, p = .868. For perceived safety, the main effect of proximity was not significant, F(1, 39) = 0.52, p = .474, while the main effect of orientation was significant, F(1, 39) = 9.06, p = .005. The interaction effect was not significant, F(1, 39) = 0.31, p = .580.
The Bonferroni post hoc tests revealed that, across all dimensions, the UP-UF was rated significantly higher than the WP-WF (p < .05), while no significant differences were found between the remaining conditions. The UP was rated significantly higher than the WP in terms of anthropomorphism, animacy, likability, and perceived intelligence. Similarly, the UF consistently received more positive evaluations than the WF condition across all dimensions.
Overall, the UP-UF was perceived most positively, whereas the WP-WF received the lowest ratings. These findings indicate that AI companion robots are perceived as more likable and socially engaging when interacting closely with users while providing information. Moreover, direct gaze contributed to increased perceptions of anthropomorphism, suggesting that such robots may be expected to serve as friendly companions in future home environments.
|
Factors |
UP-UF M (SD) |
UP-WF M (SD) |
WP-UF M (SD) |
WP-WF M (SD) |
|
Anthropomorphism |
5.25 (1.10) |
4.40 (1.15) |
4.80 (1.05) |
4.05 (1.20) |
|
Animacy |
5.10 (1.02) |
4.20 (1.18) |
4.65 (1.07) |
3.95 (1.25) |
|
Likeability |
5.55 (0.95) |
4.85 (1.15) |
5.10 (1.01) |
4.60 (1.30) |
|
Perceived intelligence |
5.45 (0.90) |
5.10 (1.10) |
5.20 (1.00) |
4.95 (1.15) |
|
Perceived safety |
5.60 (1.05) |
5.35 (1.12) |
5.40 (1.10) |
5.25 (1.15) |
|
Social presence |
4.64 (1.36) |
3.75 (1.38) |
4.20 (1.43) |
3.25 (1.51) |
|
Inclusion of other in the self |
3.93 (1.79) |
2.88 (1.49) |
3.50 (1.77) |
2.58 (1.72) |
|
Comfort |
5.82 (1.19) |
5.66 (1.21) |
5.76 (2.06) |
5.23 (1.44) |
|
Willingness to accept |
5.41 (1.50) |
4.94 (1.67) |
5.23 (1.51) |
4.30 (1.78) |
3.1.2 Social presence
An analysis was conducted to examine social presence between the user and the robot. The results showed that the main effect of proximity was significant, F(1, 39) = 20.02, p < .001. Participants reported higher social presence in the UP (UP-UF: M = 4.64, SD = 1.36; UP-WF: M = 3.75, SD = 1.38) compared with the WP (WP-UF: M = 4.20, SD = 1.43; WP-WF: M = 3.25, SD = 1.51). The main effect of orientation was also significant, F(1, 39) = 25.46, p < .001, indicating that the UF elicited higher perceptions of social presence than the WF. In contrast, the interaction between proximity and orientation was not significant, F(1, 39) = 0.04, p = .848, suggesting that the two factors contributed independently to perceptions of social presence. Bonferroni post hoc tests revealed that the UP-UF produced significantly higher social presence scores than the WP-WF (p < .05), while no significant differences were observed between the other conditions.
These findings demonstrate that both robot proximity and gaze direction play important roles in enhancing social presence. The UP and UF independently increased perceptions of social presence, whereas the WP-WF resulted in the lowest ratings, indicating a reduction in perceived social presence. Consequently, when the robot interacted in close proximity to the user, participants perceived it as more human-like and as an entity capable of expressing genuine emotions.
3.1.3 Inclusion of other in the self
To examine the relationship between the user and the robot, an analysis of closeness was conducted. The results indicated that the main effect of proximity was significant, F(1, 39) = 7.46, p = .009. Participants reported higher IOS scores in the UP (UP-UF: M = 3.93, SD = 1.79; UP-WF: M = 2.88, SD = 1.49) compared with the WP (WP-UF: M = 3.50, SD = 1.77; WP-WF: M = 2.58, SD = 1.72). The main effect of orientation was also significant, F(1, 39) = 28.31, p < .001, showing that the UF elicited higher closeness scores than the WF. However, the interaction between proximity and orientation was not significant, F(1, 39) = 0.18, p = .677. Bonferroni post hoc tests revealed that the UP-UF produced significantly higher IOS scores than the WP-WF (p < .05), while no significant differences were observed between the remaining conditions.
These findings suggest that users felt a stronger sense of relational closeness with the robot when it was positioned nearby and maintained eye contact. Although there was no combined interaction effect, both proximity and face orientation independently contributed positively to the perception of closeness.
3.1.4 Comfort
The distribution of the comfort scores violated the normality assumption according to the Shapiro-Wilk test. However, after re-examining the skewness (Skewness = 1.03) and kurtosis (Kurtosis = 13.79), and considering the sample size (N = 40) along with the robustness of repeated measures ANOVA (Blanca et al., 2013), it was determined that the analysis would not be substantially distorted. Therefore, a Two-Way Repeated Measures ANOVA was conducted.
The results revealed a significant main effect of proximity, F(1,39) = 4.64, p = .038. Participants reported significantly higher comfort scores in the UP (M = 5.82, SD = 1.19; M = 5.76, SD = 2.06) compared to the WP condition (M = 5.66, SD = 1.21; M = 5.23, SD = 1.44). In contrast, the main effect of orientation was not significant, F(1,39) = 1.84, p = .183. Although the UF showed slightly higher scores than the WF, the difference was not statistically significant. Additionally, the interaction effect between proximity and orientation was not significant, F(1,39) = 1.22, p = .275. The Bonferroni-adjusted post hoc analysis indicated that the UP-UF produced higher comfort scores than the WP-WF, but this difference was not statistically significant (p > .05).
These results indicate that robot proximity has a significant effect on user comfort, with users reporting higher comfort when the robot was positioned closer to them. Conversely, orientation and the interaction between proximity and orientation did not significantly affect comfort. This suggests that in home environments, users may experience comfortable interaction with a robot even when it is not directly facing them, as long as it remains in close proximity.
3.1.5 Willingness to accept
The intention to use the AI companion robot was analyzed. The results showed a significant main effect of proximity, F(1,39) = 8.90, p = .005. Participants reported higher intention to use the robot in the UP (M = 5.41, SD = 1.50; M = 4.94, SD = 1.67) than in the WP (M = 5.23, SD = 1.51; M = 4.30, SD = 1.78). There was also a significant main effect of orientation, F(1,39) = 9.96, p = .003. The UF resulted in higher intention to use than the WF. In contrast, the interaction effect between proximity and orientation was not significant, F(1,39) = 1.82, p = .185. The Bonferroni-adjusted post hoc test showed that the UP-UF produced significantly higher intention scores than the WP-WF (p < .05). No other pairwise comparisons reached statistical significance.
Both UP and UF increased the intention to use the robot compared to WP and WF. Although the interaction effect was not significant, each factor independently had a positive impact on robot acceptance. This suggests that, in the future, AI companion robots should be designed to stay close to users and engage in face-to-face communication.
3.1.6 Interviews
Through the interviews, subjective opinions regarding the interaction effects of proximity and face orientation were collected (Table 4). Participants expressed their views from both user-related and information-related perspectives, depending on individual characteristics. Most participants reported positive feelings toward the robot and described it as friendly. Some users compared the robot to a family member or pet that approaches and communicates with them. They also mentioned that the small size and friendly appearance of the robot used in the experiment made communication feel more comfortable. Participants noted that the robot's appearance and voice could be important factors in interaction and should be considered in future designs (Kirby et al., 2010; Hwang et al., 2013).
From the user perspective, participants felt that receiving information from a robot positioned nearby created a sense of connection and was more effective. They perceived the robot being distant or not facing the user as a sign of malfunction or disengagement. Opinions from this perspective focused on social interaction and emphasized the importance of human–robot connectedness. From the information perspective, some participants reported that when the robot faced the wall, even at a close distance, they were able to focus better on the information with fewer distractions. They stated that emotional exchange with the robot was not necessary and that interacting with it as a tool to deliver information was efficient and increased trust, regardless of distance. While making eye contact with the robot enhanced comfort, some participants found it distracting when focusing on information. A few participants also mentioned that the appropriate level of proximity could vary depending on the type of tasks performed at home.
Interestingly, opinions differed by age group. Older participants, who spent more time at home and perceived the robot as a companion, emphasized the importance of eye contact. They felt uncomfortable without face-to-face interaction and interpreted the robot looking at the wall as a signal that communication was unnecessary or that they were being ignored. Younger participants also valued intimacy and likability but additionally highlighted functional aspects. They considered the robot's role as a tool to be appropriate depending on the information provided and the user's context, and they evaluated facing the screen while providing information as enhancing trust in the information. While communication with users is important for AI companion robots, the level of information and the user context should also be taken into consideration.
|
Age |
Example quotes |
|
|
Focus on user interaction |
||
|
20s |
P6 |
"I don't know if I should call it intimacy, but there's a sense of
connection that we're talking..." |
|
20s |
P19 |
"Up close, it's like chatting with a friend. Far away, more like a
presentation." |
|
50s |
P16 |
"It's even more unpleasant when you're close to me and you don't
look at me." |
|
50s |
P22 |
"... I feel like we are communicating with each other because we
make eye contact." |
|
60s |
P31 |
"If it doesn't look at me, it feels like something's wrong… like I'm
arguing with a friend." |
|
|
Focus on information delivery |
|
|
20s |
P8 |
"I don't think a machine needs to be
human, it doesn't need to have an emotional connection, |
|
30s |
P5 |
"It feels a bit distracting when giving information, so I think it's
better to keep looking at the wall..." |
|
30s |
P14 |
"When you're near me and you're talking
to me and looking at me, I can't see the information on |
|
50s |
P36 |
"I'm usually doing chores around the house, so it's okay if I don't
have to be close to you." |
This study investigated the effects of interaction distance and face orientation on information delivery by AI companion robots in home environments. The results showed that user experience was enhanced when the robot provided information from a close distance. Although users often prefer a comfortable distance rather than very close proximity (Babel et al., 2021), the findings of this study demonstrated that an appropriate level of proximity can be applied to users' personal spaces, indicating potential for further research expansion.
When the robot faced the user, participants perceived it as more friendly and companion-like, and they reported feeling less pressured to maintain eye contact even when the robot approached them. In all conditions, facing the user was evaluated more positively than facing the wall. This effect was particularly pronounced among older participants, who preferred the small robot used in the experiment and emphasized companionship (Wu et al., 2012; Torta et al., 2014). Comfort was rated the highest among all dimensions, suggesting its importance in home environments and highlighting the potential for AI companion robots in daily life. This context also appeared to influence usage intention, as face-to-face interaction was positively evaluated for its non-intrusive and approachable nature.
With respect to social presence, close interaction with the user received the highest ratings, although distant interaction was also positively evaluated in specific contexts. Participants described distant face-to-face interactions as resembling communication with an actual person, possibly due to the socially acceptable nature of such interactions (Gurung et al., 2021). In terms of relational closeness, the lowest evaluations were observed when the robot was perceived as more mechanical. Younger participants were less likely than older participants to include the robot in their social relationships, possibly because they viewed the robot as a tool and evaluated its role more objectively.
Furthermore, participants indicated a higher intention to use the robot when it was positioned close to them. Face-to-face interaction was positively received, promoting emotional acceptance and enabling continuous interaction. AI companion robots demonstrated the ability to understand user intentions and adapt to user needs, suggesting that interacting closely with users while meeting their requirements will be an essential advantage. The results also revealed significant differences between conditions in which the robot was near and facing the user versus near and facing the wall. Participants felt that remaining close while providing information enhanced their positive perceptions of the robot. For continuous use in home environments, familiarity with the robot is crucial. Unlike professional settings, high levels of technical expertise are not required in home environments. Although interaction distance and engagement may vary depending on the importance and complexity of the content, the personal and cozy nature of home settings underscores the importance of closeness with the robot. As AI companion robots continue to evolve, their interactions are expected to expand beyond information delivery to include integration with various types of content and AI services. Additionally, such robots can provide information without constraints related to screen size, offering opportunities for deeper research on user approaches, behaviors, and attitudes. This study contributes to predicting user experiences and serves as a basis for the development of advanced AI companion robots.
Despite its contributions, this study has several limitations. First, although home robots are expected to be used frequently in daily life, this experiment was based on a single interaction. Human–robot social interaction begins with relationship-building and can develop through emotional communication (Duffy, 2003). Future studies should examine long-term use and perception. Moreover, the equipment used in this experiment was an electronic device designed to appear as an autonomous robot, which may have influenced participants' perceptions depending on their age and familiarity with technology. The robot's appearance may also affect the level of acceptance and should be considered in future research (Lehman et al., 2020). While users generally hold positive perceptions of home robots (Scopelliti et al., 2005), these perceptions may vary depending on the type of information provided. The information used in this study involved common daily topics; however, users' behavior may change depending on the importance and urgency of the information. Privacy concerns and individual differences in sensitivity to personal data should also be taken into account in future research.
This study investigated how the behavior of AI companion robots designed to assist users in home environments influences user experience. The findings revealed that face-to-face interaction at close proximity during information delivery was evaluated most positively, being perceived as comfortable and intimate. When the robot delivered information from a distance or avoided facing the user, evaluations were generally lower, and participants tended to perceive issues in the relationship with the robot. Regarding intention to use, robots that remained close to the user were rated more highly, even when simply delivering information. These results suggest that robots ensuring close proximity have the potential to enhance daily life and provide meaningful assistance in home environments. Furthermore, the findings offer practical insights into interaction strategies and communication behaviors for personalized robots operating within personal spaces.
References
1. Adams, A. and Cox, A.L., Questionnaires, in-depth interviews and focus groups (pp. 17-34). Cambridge University Press, 2008.
Google Scholar
2. Aleksander, I., Partners of humans: a realistic assessment of the role of robots in the foreseeable future. Journal of Information Technology, 32(1), 1-9, 2017.
Google Scholar
3. Aron, A., Aron, E.N. and Smollan, D., Inclusion of other in the self scale and the structure of interpersonal closeness. Journal of Personality and Social Psychology, 63(4), 596, 1992.
Google Scholar
4. Babel, F., Kraus, J., Miller, L., Kraus, M., Wagner, N., Minker, W. and Baumann, M., Small talk with a robot? The impact of dialog content, talk initiative, and gaze behavior of a social robot on trust, acceptance, and proximity. International Journal of Social Robotics, 13(6), 1485-1498, 2021.
Google Scholar
5. Bartneck, C., Kulić, D., Croft, E. and Zoghbi, S., Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. International Journal of Social Robotics, 1, 71-81, 2009.
Google Scholar
6. Becker, C., Kopp, S. and Wachsmuth, I., Why emotions should be integrated into conversational agents. Conversational Informatics: an Engineering Approach, 3, 49-68, 2007.
Google Scholar
7. Blanca, M.J., Arnau, J., López-Montiel, D., Bono, R. and Bendayan, R., Skewness and kurtosis in real data samples. Methodology, 2013.
Google Scholar
8. Blut, M., Wang, C., Wünderlich, N.V. and Brock, C., Understanding anthropomorphism in service provision: a meta-analysis of physical robots, chatbots, and other AI. Journal of the Academy of Marketing Science, 49, 632-658, 2021.
Google Scholar
9. Bradley, J.V., Complete counterbalancing of immediate sequential effects in a Latin square design. Journal of the American Statistical Association, 53(282), 525-528, 1958.
Google Scholar
10. Brandl, C., Mertens, A. and Schlick, C.M., Human-robot interaction in assisted personal services: factors influencing distances that humans will accept between themselves and an approaching service robot. Human Factors and Ergonomics in Manufacturing & Service Industries, 26(6), 713-727, 2016.
Google Scholar
11. Breazeal, C., Toward sociable robots. Robotics and Autonomous Systems, 42(3-4), 167-175, 2003.
Google Scholar
12. Breazeal, C., Dautenhahn, K. and Kanda, T., Social robotics. Springer Handbook of Robotics, 1935-1972, 2016.
Google Scholar
13. Bröhl, C., Nelles, J., Brandl, C., Mertens, A. and Schlick, C.M., TAM reloaded: a technology acceptance model for human-robot cooperation in production systems. In International Conference on Human-Computer Interaction (pp. 97-103), 2016.
Google Scholar
14. Bugmann, G. and Copleston, S.N., What can a personal robot do for you?. In Conference Towards Autonomous Robotic Systems (pp. 360-371). Berlin, Heidelberg: Springer Berlin Heidelberg, 2011.
Google Scholar
15. Cooper, S., Di Fava, A., Vivas, C., Marchionni, L. and Ferro, F., ARI: The social assistive robot and companion. In 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (pp. 745-751). IEEE, 2020.
Google Scholar
16. Dautenhahn, K., Getting to know each other—artificial social intelligence for autonomous robots. Robotics and Autonomous Systems, 16(2-4), 333-356, 1995.
17. De Santis, A., Siciliano, B., De Luca, A. and Bicchi, A., An atlas of physical human–robot interaction. Mechanism and Machine Theory, 43(3), 253-270, 2008.
Google Scholar
18. DiSalvo, C.F., Gemperle, F., Forlizzi, J. and Kiesler, S., All robots are not created equal: the design and perception of humanoid robot heads. In Proceedings of the 4th Conference on Designing Interactive Systems: Processes, Practices, Methods, and Techniques, (pp. 321-326), 2002.
Google Scholar
19. Duffy, B.R., Anthropomorphism and the social robot. Robotics and Autonomous Systems, 42(3-4), 177-190, 2003.
Google Scholar
20. Feil-Seifer, D. and Mataric, M.J., Defining socially assistive robotics. In 9th International Conference on Rehabilitation Robotics, 2005. ICORR 2005. (pp. 465-468). IEEE, 2005.
Google Scholar
21. Fong, T., Nourbakhsh, I. and Dautenhahn, K., A survey of socially interactive robots. Robotics and Autonomous Systems, 42(3-4), 143-166, 2003.
Google Scholar
22. Góngora Alonso, S., Hamrioui, S., de la Torre Díez, I., Motta Cruz, E., López-Coronado, M. and Franco, M., Social robots for people with aging and dementia: a systematic review of literature. Telemedicine and e-Health, 25(7), 533-540, 2019.
Google Scholar
23. Goodrich, M.A. and Schultz, A.C., Human–robot interaction: a survey. Foundations and Trends® in Human–Computer Interaction, 1(3), 203-275, 2008.
Google Scholar
24. Gursoy, D., Chi, O.H., Lu, L. and Nunkoo, R., Consumers acceptance of artificially intelligent (AI) device use in service delivery. International Journal of Information Management, 49, 157-169, 2019.
Google Scholar
25. Gurung, N., Grant, J.B. and Herath, D., What's in a face? The Effect of Faces in Human Robot Interaction. In 2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN) (pp. 1024-1030). IEEE, 2021.
Google Scholar
26. Hall, E.T., Birdwhistell, R.L., Bock, B., Bohannan, P., Diebold, A.R., Durbin, M., Edmonson, M.S., Fischer, J.L., Hymes, D., Kimball, S.T., La Barre, W., Frank Lynch, S.J., McClellan, J.E., Marshall, D.S., Milner, G.B., Sarles, H.B., Trager, G.L. and Vayda, A.P., Proxemics [and Comments and Replies]. Current Anthropology, 9(2/3), 83-108, 1968.
27. Heerink, M., Kröse, B., Evers, V. and Wielinga, B., The influence of social presence on acceptance of a companion robot by older people, 2008.
Google Scholar
28. Henschel, A., Laban, G. and Cross, E.S., What makes a robot social? A review of social robots from science fiction to a home or hospital near you. Current Robotics Reports, 2, 9-19, 2021.
Google Scholar
29. Huang, M.H. and Rust, R.T., Engaged to a robot? The role of AI in service. Journal of Service Research, 24(1), 30-41, 2021.
Google Scholar
30. Hwang, J., Park, T. and Hwang, W., The effects of overall robot shape on the emotions invoked in users and the perceived personalities of robot. Applied Ergonomics, 44(3), 459-471, 2013.
Google Scholar
31. Kim, J., Merrill Jr, K. and Collins, C., AI as a friend or assistant: The mediating role of perceived usefulness in social AI vs. functional AI. Telematics and Informatics, 64, 101694, 2021.
Google Scholar
32. Kim, S.Y., Schmitt, B.H. and Thalmann, N.M., Eliza in the uncanny valley: Anthropomorphizing consumer robots increases their perceived warmth but decreases liking. Marketing Letters, 30, 1-12, 2019.
Google Scholar
33. Kim, Y. and Mutlu, B., How social distance shapes human–robot interaction. International Journal of Human-Computer Studies, 72(12), 783-795, 2014.
Google Scholar
34. Kirby, R., Forlizzi, J. and Simmons, R., Affective social robots. Robotics and Autonomous Systems, 58(3), 322-332, 2010.
Google Scholar
35. Koceski, S. and Koceska, N., Evaluation of an assistive telepresence robot for elderly healthcare. Journal of Medical Systems, 40, 1-7, 2016.
Google Scholar
36. Krämer, N.C., Eimler, S., Von Der Pütten, A. and Payr, S., Theory of companions: what can theoretical models contribute to applications and understanding of human-robot interaction?. Applied Artificial Intelligence, 25(6), 474-502, 2011.
Google Scholar
37. Lasota, P.A., Fong, T. and Shah, J.A., A survey of methods for safe human-robot interaction. Foundations and Trends® in Robotics, 5(4), 261-349, 2017.
Google Scholar
38. Lehmann, S., Ruf, E. and Misoch, S., Emotions and attitudes of older adults toward robots of different appearances and in different situations. In International Conference on Information and Communication Technologies for Ageing Well and E-Health (pp. 21-43). Cham: Springer International Publishing., 2020.
Google Scholar
39. Letheren, K., Jetten, J., Roberts, J. and Donovan, J., Robots should be seen and not heard… sometimes: Anthropomorphism and AI service robot interactions. Psychology & Marketing, 38(12), 2393-2406, 2021.
Google Scholar
40. Li, D., Rau, P.P. and Li, Y., A cross-cultural study: Effect of robot appearance and task. International Journal of Social Robotics, 2, 175-186, 2010.
Google Scholar
41. Lindblom, J., Alenljung, B. and Billing, E., Evaluating the user experience of human–robot interaction. Human-Robot Interaction: Evaluation Methods and Their Standardization, 231-256, 2020.
Google Scholar
42. Montemerlo, M., Pineau, J., Roy, N., Thrun, S. and Verma, V., Experiences with a mobile robotic guide for the elderly. AAAI/IAAI, 2002, 587-592, 2002.
Google Scholar
43. Mori, M., MacDorman, K.F. and Kageki, N., The uncanny valley [from the field]. IEEE Robotics & Automation Magazine, 19(2), 98-100, 2012.
Google Scholar
44. Ray, C., Mondada, F. and Siegwart, R., What do people expect from robots?. In 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3816-3821). IEEE, 2008.
Google Scholar
45. Robinson, H., MacDonald, B. and Broadbent, E., The role of healthcare robots for older people at home: A review. International Journal of Social Robotics, 6, 575-591, 2014.
Google Scholar
46. Salem, M., Eyssel, F., Rohlfing, K., Kopp, S. and Joublin, F., To err is human (-like): Effects of robot gesture on perceived anthropomorphism and likability. International Journal of Social Robotics, 5, 313-323, 2013.
Google Scholar
47. Sarrica, M., Brondi, S. and Fortunati, L., How many facets does a "social robot" have? A review of scientific and popular definitions online. Information Technology & People, 33(1), 1-21, 2020.
Google Scholar
48. Scopelliti, M., Giuliani, M.V. and Fornara, F., Robots in a domestic setting: a psychological approach. Universal Access in the Information Society, 4, 146-155, 2005.
Google Scholar
49. Siebert, F.W., Pickl, J., Klein, J., Rötting, M. and Roesler, E., Let's not get too personal-distance regulation for follow me robots. In International Conference on Human-Computer Interaction (pp. 459-467). Cham: Springer International Publishing, 2020.
Google Scholar
50. Smarr, C.A., Mitzner, T.L., Beer, J.M., Prakash, A., Chen, T.L., Kemp, C.C. and Rogers, W.A., Domestic robots for older adults: attitudes, preferences, and potential. International Journal of Social Robotics, 6(2), 229-247, 2014.
Google Scholar
51. Strohmann, T., Siemon, D., Khosrawi-Rad, B. and Robra-Bissantz, S., Toward a design theory for virtual companionship. Human–Computer Interaction, 38(3-4), 194-234, 2023.
Google Scholar
52. Torta, E., Werner, F., Johnson, D.O., Juola, J.F., Cuijpers, R.H., Bazzani, M., Oberzaucher, J., Lemberger, J., Lewy, H. and Bregman, J., Evaluation of a small socially-assistive humanoid robot in intelligent homes for the care of the elderly. Journal of Intelligent & Robotic Systems, 76(1), 57-71, 2014.
Google Scholar
53. Tóth, Z., Caruana, R., Gruber, T. and Loebbecke, C., The dawn of the AI robots: Towards a new framework of AI robot accountability. Journal of Business Ethics, 178(4), 895-916, 2022.
Google Scholar
54. Tsai, T.C., Hsu, Y.L., Ma, A.I., King, T. and Wu, C.H., Developing a telepresence robot for interpersonal communication with the elderly in a home environment. Telemedicine and e-Health, 13(4), 407-424, 2007.
Google Scholar
55. Venkatesh, V., Thong, J.Y. and Xu, X., Consumer acceptance and use of information technology: extending the unified theory of acceptance and use of technology. MIS Quarterly, 157-178, 2012.
Google Scholar
56. Wada, K. and Shibata, T., Living with seal robots—its sociopsychological and physiological influences on the elderly at a care house. IEEE Transactions on Robotics, 23(5), 972-980, 2007.
Google Scholar
57. Wu, Y.H., Fassert, C. and Rigaud, A.S., Designing robots for the elderly: appearance issue and beyond. Archives of Gerontology and Geriatrics, 54(1), 121-126, 2012.
Google Scholar
58. Yanco, H.A. and Drury, J., Classifying human-robot interaction: an updated taxonomy. In 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No. 04CH37583) (3, pp. 2841-2846). IEEE, 2004.
Google Scholar
PIDS App ServiceClick here!