eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Seungjae Son
, Yong-Ku Kong
, Hyunji Keum
, Dokyeong Lee
, Hyunseok Yang
, JaeHwi Lee
, Hyun-Ho Shim
10.5143/JESK.2025.44.5.643 Epub 2025 November 07
Abstract
Objective: This study aimed to investigate the influence of varying sensor attachment pressure conditions and normalization techniques on surface electromyography (sEMG) signals and maximum voluntary contraction (MVC) measurements in lower-limb muscles. It also intended to assess how these factors affect the interpretation of muscular activity during the operation of wearable lower-limb exoskeletons.
Background: Lower-limb exoskeletons are among the most prominent technologies designed to assist and/or augment muscle load and strength across various industrial applications. Surface electromyography (sEMG) has been widely employed to evaluate the usability of such exoskeletons. However, due to the structural characteristics of exoskeletons, physical interference between the device and sEMG sensors often leads to unintended pressure on the sensors. This sensor pressure can cause signal distortion or interference. To address this issue, researchers have attempted to reposition EMG sensors, leading to an inaccurate assessment of the exoskeletons.
Method: Twenty healthy adults (10 males and 10 females) participated in this study. Surface EMG electrodes were placed on four lower-limb muscles: the rectus femoris (RF), biceps femoris (BF), tibialis anterior (TA), and gastrocnemius (GAS). Maximum voluntary contraction (MVC) and task-related EMG signals were recorded under three sensor attachment pressure conditions: no pressure (NP), medium pressure (MP), and high pressure (HP). The EMG data were normalized using three corresponding MVC references: NPMVC, MPMVC, and HPMVC. Participants performed static and dynamic half-squat tasks, as well as exoskeleton-assisted tasks. The data were analyzed to assess the main effects of pressure conditions and normalization method, as well as their interaction effects on muscle activation patterns.
Results: Results showed that there were no significant effects of sensor pressure or normalization methods on MVC or task-related sEMG output. Overall muscle activation trends remained consistent across all sensor pressure conditions. During the half-squat tasks, the anterior muscles - rectus femoris (RF) and tibialis anterior (TA) - exhibited higher activation levels compared to the posterior muscles biceps femoris(BF) and gastrocnemius (GAS). This activation pattern was stable irrespective of sensor pressure condition and normalization technique. In exoskeleton-assisted tasks, overall muscle activation was reduced relative to the half-squat tasks; however, the relative activation hierarchy among muscles was maintained and similarly unaffected by variations in pressure or normalization method.
Conclusion: This study demonstrated that sensor attachment pressure and normalization method had no significant effect on lower-limb muscle activation outcomes across MVC assessments, half-squat exercises, and exoskeleton-assisted tasks. However, as the investigation was limited to anteriorly applied sensor pressure and a young adult population, further research is needed to validate the generalizability of these findings across different sensor placements and demographic groups.
Application: The results provide a methodological basis for reliably evaluating exoskeleton performance without modifying sensor placement or normalization strategies, thereby minimizing unnecessary adjustments in future assessments.
Keywords
sEMG (Surface Electromyography) Exoskeleton Sensor placement Maximum Voluntary Contraction (MVC)
외골격은 작업자의 근력을 보조하거나 강화하기 위한 착용형 장치로, 동력의 유무에 따라 Active와 Passive로 구분되며, 상지, 하지, 척추 등 적용 부위에 따라 다양하게 활용된다. 활용 분야는 군사, 재활의학, 산업현장 등으로 광범위하며, 각 분야에서 신체 부담 경감 및 작업 효율 향상을 위해 사용되고 있다(Kozlowski et al., 2015; Crowell et al., 2018; Huysamen et al., 2018).
외골격의 효과를 평가하는 방법에는 in vitro(기계적 분석), in vivo(생체 반응 측정), in silco(시뮬레이션)가 있으며(Zheng et al., 2021), 이 중 in vivo 방식은 사용자의 생리적 반응과 심리적 반응을 평가하는 방법으로 주관적 평가(Borg CR10 등)와 객관적(근전도, 심박수 등) 평가로 구성된다. 특히 표면 근전도(Surface Electromyography: sEMG)는 인간공학 연구에서 근육의 작업 부담 평가를 위해 널리 사용되며, 실제 외골격 평가 시에 가장 많이 사용되는 객관적 지표이다(Cardoso et al., 2024). 다만, 외골격 평가에 근전도 시스템의 적용에는 근전도 센서 부착 위치와 외골격의 구조물과의 간섭으로 인한 압박, 진동, 노이즈 등의 간섭이 발생할 수 있기 때문에(Zheng et al., 2021), 이러한 간섭을 최소화하기 위한 실험 설계의 중요성이 강조된다(Rukina et al., 2016). 따라서, 많은 연구자들은 외골격 평가 시 근전도 센서와 외골격 구조물 간의 간섭을 피하기 위한 실험 설계를 하거나 근전도 센서의 위치를 변경해 평가하기도 하지만(Pillai et al., 2020; Rafique et al., 2024), 이 경우 평가하고자 하는 근육의 근복(Muscle belly)을 벗어난 부위의 부착으로 인해 부정확한 근육 위치에서의 측정 또는 건 등에 의해 추가적인 간섭이 발생하여 외골격 착용에 따른 근육 경감 정도를 정확히 평가할 수 없다는 한계가 존재한다(Rainoldi et al., 2004; Konrad, 2005; De Luca et al., 2010).
이러한 선행 연구의 한계점을 극복하기 위해, 본 연구는 하지 외골격 장치의 근활성도 평가에서, 표면 근전도 센서 부착 시 구조물에 의한 간섭이 근전도 신호에 미치는 영향을 분석하는 것을 목적으로 한다. 구조물에 의한 간섭을 가정하기 위해 근전도 부착 부위에 압박을 가한 채로 측정을 수행하였으며 이러한 압박 수준과 정규화 방식에 따른 근전도 신호 결과를 분석하였다. 이를 위해 다음의 세 가지 세부 목적을 설정하였다.
첫째, 세 가지 압박 수준(압박 없음: No Pressure, NP; 중간 압박: Middle Pressure, MP; 높은 압박: High Pressure, HP)이 하지 근육[대퇴직근(Rectus Femoris, RF), 대퇴 이두근(Biceps Femoris, BF), 전경골근(Tibialis Anterior, TA), 비복근(Gastrocnemius, GAS)]의 최대수의근력(Maximum Voluntary Contraction: MVC)에 미치는 영향을 분석하고자 하였다.
둘째, 세 가지 압박 수준(압박 없음: NP; 중간 압박: MP; 높은 압박: HP)과 정규화 방법(NP로 정규화: NPMVC, MP로 정규화: MPMVC, HP로 정규화: HPMVC)이 static/dynamic half-squat task 수행 시, 하지 근육[대퇴직근(RF), 대퇴 이두근(BF), 전경골근(TA), 비복근(GAS)]의 근활성도 분석 결과에 미치는 영향을 분석하고자 하였다.
셋째, 정규화 방법[NP로 정규화: NPMVC, MP로 정규화: MPMVC, HP로 정규화: HPMVC)의 변경이 하지 외골격(CEX) 착용 시 하지 근육[대퇴직근(RF), 대퇴 이두근(BF), 전경골근(TA), 비복근(GAS)]의 근활성도 분석 결과에 미치는 영향을 분석하고자 하였다.
2.1 Participants
본 연구는 최근 1년간 근골격계질환을 경험한 적이 없는 건강한 20~30대 성인 남녀 각 10명, 총 20명을 대상으로 진행하였다. 참가자의 성별, 연령, 신장, 체중과 관련된 정보는 Table 1과 같다. 실험에 각 피험자들에게 실험에 대한 목적과 절차에 대해 안내하였고, 성균관대학교 생명윤리위원회로부터 IRB (approval#: SKKU 2025-05-018-00) 승인을 받았다.
|
Gender |
Age (years) |
Height (cm) |
Weight (kg) |
|
Male |
26.8±3.36 |
169.46±5.33 |
74.96±10.37 |
|
Female |
24.8±3.33 |
163.31±4.02 |
57.23±10.54 |
2.2 Experimental conditions
표면 근전도 센서에 가해지는 압박 수준이 근활성도 데이터 분석에 미치는 영향을 평가하기 위해 압박 없음(No Pressure: 0mmHg), 중간 압박(Middle Pressure: 50mmHg), 높은 압박(High Pressure: 100mmHg)의 세 가지 압박 수준을 설정하였다. 압박 없음(NP)은 기존의 근전도 실험에서 일반적으로 수행해 오는 바와 같이, 표면 근전도 센서에 고정을 위한 테이핑의 압박 외의 다른 추가 압박이 가해지지 않는 상태(0mmHg)를 말한다. 높은 압박(HP)의 경우 의자 설계 시 압박의 위험 수준의 한계로 제시되는 100mmHg (Gefen, 2007; Champion et al., 2022)의 압박으로 설정하였으며, 중간 압박(MP)의 경우 압박 없음(NP)과 높은 압박(HP)의 중간 수준이며, 소프트 하네스를 활용하여 외골격을 신체에 고정할 때의 최적 압박 범위인 50~80mmHg (Langlois et al., 2020) 내에 해당하는 50mmHg로 설정하였다.
2.3 Apparatus
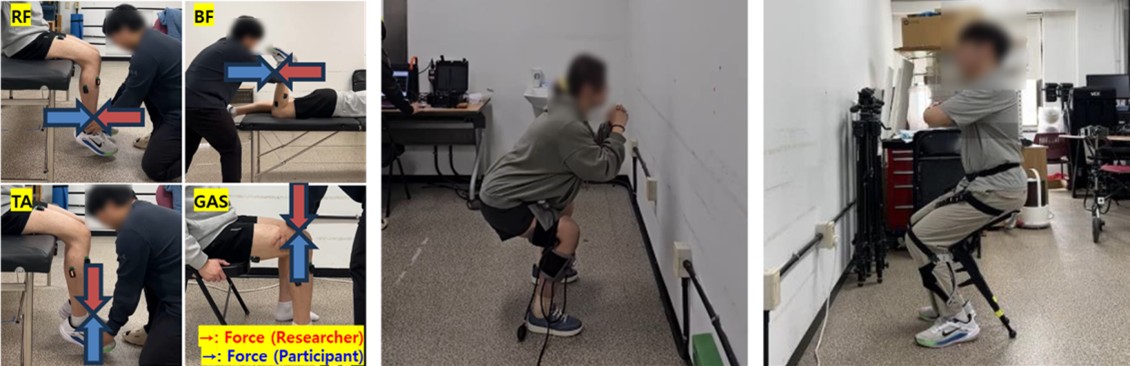
본 연구는 근육의 활성도를 평가하기 위해 무선 근전도(Trigno Research System, Delsys, MA, USA)를 사용하였으며 주력손측의 대퇴직근(RF), 대퇴 이두근(BF), 전경골근(TA), 비복근(GAS) 등 총 4개의 근육(Figure 1)에 센서를 부착한 후, 피험자의 근육 별 정규화를 수행하기 위해 MVC를 각각 측정하였다. 근전도는 1,500Hz로 수집하였으며, band pass filter (20~450Hz)로 4th order Butterworth filter를 수행한 뒤, RMS (Root-mean square: 50ms)를 사용하여 smoothing을 수행하였다.

각 센서에 균일한 압박을 위해 아네로이드식 혈압계(Sphygmomanometer aneroid type: SANKEI, Japan)를 사용하여 표면 근전도 센서에 가해지는 압박 수준을 제어하였으며 일정한 압박을 유지하기 위해 각 Task를 수행한 뒤 혈압계의 압력을 확인하였다. Exoskeleton task 진행을 위한 외골격으로는 CEX (Hyundai motor group, Seoul, Republic of Korea)를 선정하였다(Figure 2).

2.4 Experimental procedure
실험을 시작하기에 앞서, 피험자에게 실험 목적과 절차를 안내한 후, 피험자의 기본적인 신체 사이즈(신장, 체중, 명치 높이)를 수집하였으며, 각 해당 근육에 표면 근전도 센서를 부착하였다. 압박 수준의 순서는 무작위로 진행되었으며, 모든 압박 환경에서 피험자는 MVC 측정과 static/dynamic half-squat task를 진행하였고, 각 압박 수준 사이에는 약 5분의 휴식 시간을 제공하였다.
압박 없음(NP) 조건에서는 표면 근전도 센서에 고정을 위한 테이핑의 압박만 있는 상태에서 하지 근육[대퇴직근(RF), 대퇴 이두근(BF), 전경골근(TA), 비복근(GAS)]에 대한 MVC를 측정하였고, 중간 압박(MP) 및 높은 압박(HP) 조건에서는 근전도 센서에 혈압계를 이용한 압박을 가한 후, 압박 없음(NP) 조건과 동일한 방법으로, 각 근육의 MVC를 측정하였으며 측정 방법은 다음과 같다(Figure 3, left). 대퇴직근(RF)의 경우 의자에 앉아 다리가 공중에 뜬 상태에서 무릎을 최대한 신전하도록 하였으며, 대퇴 이두근(BF)은 엎드린 자세에서 무릎을 90° 굴곡한 상태에서 무릎을 최대한 굴곡하도록 하였다. 전경골근(TA)는 의자에 앉아 발목을 최대한 굴곡하도록 하였으며, 비복근(GAS)는 발목 각도 110°인 상태에서 발뒤꿈치를 최대한 들어올리도록 하여 측정하였다(Avdan et al., 2023; Kong et al., 2023).
Static half-squat task는 half-squat를 6초간 유지하는 동작으로, 동작 중 연구자가 구두로 시간을 안내하였다. Dynamic half-squat task는 half-squat를 3회 반복 수행하는 방식으로, 각 half-squat는 메트로놈(60bpm)에 맞춰 진행되었다(Figure 3, mid). Half-squat 진행 시 사전에 측정된 각 피험자의 명치 높이에 시선이 도달하도록 설정하였다. Exoskeleton task의 경우, 쪼그려 앉는 자세가 많이 발생하는 농작업 수확 작업과 같은 작업 수행 시 하지 외골격을 사용하는 동작에 대한 평가를 Simulation 하기 위해 하지 외골격을 착용한 상태로 앉은 자세를 6초 유지한 후, 일어나 어깨너비만큼 이동 후 앉고, 6초동안 앉는 자세를 유지하는 동작을 3회 반복하였다(Figure 3, right). Task 진행 중 6초간의 유지 시간은 연구자가 구두로 안내하였다.
2.5 Statistical analysis
MVC task에서는, 독립변수인 하지 근육[대퇴직근(RF), 대퇴 이두근(BF), 전경골근(TA), 비복근(GAS)]과 압박 수준(NP, MP, HP)에 따른 각 근육들의 MVC를 독립변수로 데이터를 수집 및 분석하였다. 수집된 MVC 데이터는 static/dynamic half-squat와 exoskeleton task의 데이터 분석을 위한 정규화를 진행하는데 사용되었고 이를 압박 수준에 따라 각각 NPMVC, MPMVC, HPMVC로 설정하였다.
Static/dynamic half-squat task에서는 근활성도(%MVC)를 종속변수로 설정하였으며, 독립변수로는 하지 근육[대퇴직근(RF), 대퇴 이두근(BF), 전경골근(TA), 비복근(GAS)], 압박 수준(NP, MP, HP), 정규화 방식(NPMVC, MPMVC, HPMVC)으로 구성하였다. 또한, exoskeleton task에서의 종속변수는 근활성도(%MVC)로 설정하였다. 독립변수로는 하지 근육[대퇴직근(RF), 대퇴 이두근(BF), 전경골근(TA), 비복근(GAS)]과 정규화 방식(NPMVC, MPMVC, HPMVC)이 사용하였다.
통계 분석은 SPSS 20 (SPSS Inc, Chicago, Illinois, USA)을 이용하여 일원배치 분산분석(One-way Analysis of Variance)을 수행하였으며, 유의 수준(α)은 0.05로 설정하였다. 통계적으로 유의한 변수들은 Tukey-test로 사후분석을 추가 진행하였다.
3.1 Maximum voluntary contraction (MVC) data analysis
각 근육과 압박 수준에 따른 최대자의적수측근력(MVC) 데이터의 통계적 분석 결과, 근육에 따른 통계적으로 유의한 결과(p<0.001)를 보인 반면, 압박 수준은 통계적으로 유의하지 않았다. 근육과 압박 수준의 교호작용 역시 통계적으로 유의하지 않았다.
근육에 따른 MVC 데이터의 Tukey 사후검정 결과 근육 간 유의미한 차이를 보였는데(p<0.05), 대퇴 이두근(BF) 근육의 MVC가 가장 높은 근활성도(0.86mV)를 보인 반면, 비복근(GAS)의 MVC는 가장 낮은 근활성도(0.27mV)를 보였다. 대퇴 이두근(BF)은 대퇴직근(RF: 0.41mV), 전경골근(TA: 0.38mV), 비복근(GAS)보다 각각 약 2.09배, 2.26배, 그리고 3.18배 더 높은 MVC 값을 보였다(Figure 4).

압박 수준에 따른 MVC 값은 각각 압박 없음(NP: 0.47mV), 중간 압박(MP: 0.46mV), 높은 압박(HP: 0.5mV)로 통계적으로 유의하지 않았다(p=0.836). 이는, 근전도 센서 부착 후, 센서에 가해지는 압박의 정도가 근육의 MVC 데이터에 큰 영향을 주지 않음을 시사한다.
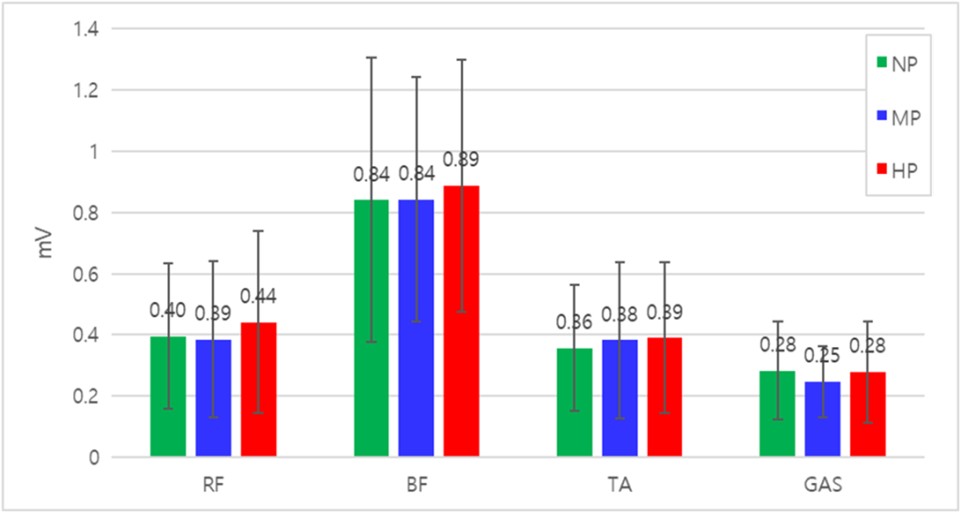
근육과 압박 수준 간의 교호작용 역시 통계적으로 유의하지 않았다(p=0.993). 대퇴직근(RF)의 경우, 압박 없음(NP)과 50mmHg의 중간 압박(MP), 100mmHg의 높은 압박(HP)에서의 MVC 데이터는 각각 0.4mV, 0.39mV, 0.44mV로 통계적으로 유의하지 않았으며, 대퇴 이두근(BF)은 0.84~0.89mV, 전경골근(TA)은 0.36~0.39mV, 비복근(GAS)은 0.25~0.28mV로 모두 유사한 경향을 보였다(Figure 5). 결과적으로, 센서 압박 수준은 각 근육의 MVC 데이터에 통계적으로 유의한 영향을 주지 않음을 시사한다.
3.2 Half-squat task (Static/Dynamic) data analysis by normalized EMG
3.2.1 Static half-squat task
Static half-squat task 수행에서의 각 근육들의 근활성도 분석 결과, 통계적으로 유의한 차이를 나타냈다(p<0.001). Tukey 사후검정 결과 또한 통계적으로 유의한 차이를 보였는데(p<0.05), 대퇴직근(RF)과 전경골근(TA)의 평균 근활성도는 26.92%MVC와 27.76%MVC로 대퇴 이두근(BF)과 비복근(GAS)의 평균 근활성도인 10.22%MVC와 9.17%MVC보다 평균 1.83~2.03배 더 큰 활성도를 보였다(Figure 6). MVC 분석에서는 (3.1절), 대퇴 이두근(BF)의 근활성도가 가장 크고, 대퇴직근(RF)과 전경골근(TA) MVC 데이터가 큰 활성도를 보인 반면, 정적인 static half-squat task에서는 다리의 전방 근육인 대퇴직근(RF)과 전경골근(TA)의 기여도가 후방 근육인 대퇴 이두근(BF)과 비복근(GAS)보다 더 크게 활성화되는 것으로 분석된다.

Static half-squat task 수행에서, 압박 수준에 따른 근활성도 차이는 통계적으로 유의하지 않았고(p=0.132), 압박 없음(NP) 시 근육들의 평균 근활성도는 18.24%MVC, 중간 압박(MP) 시 19.14%MVC, 높은 압박(HP) 18.40%MVC로 통계적으로 차이가 없었다. 즉, 각 하지 근육의 센서에 가해지는 압박 수준은 static half-squat task 수행 시 하지 근육들의 근활성도 데이터에 통계적으로 큰 영향을 주지 않는 것으로 분석된다.
근육과 압박 수준에 맞는 정규화 방식과의 교호작용 역시 통계적으로 유의하지 않았다(p=0.171) (Figure 7). 즉, 대퇴직근(RF)의 경우, static half-squat task를 수행했을 때 발생하는 근활성도를 압박이 없는 상태에서 측정한 MVC 값(NPMVC)으로 정규화 데이터를 기반으로 분석을 수행한 경우 25.59%MVC를 보이고, 중간 압박 수준에서 측정한 MVC 값(MPMVC)과 높은 압박 수준에서 측정한 MVC 값(HPMVC)으로 각각 정규화 데이터를 기반으로 분석을 수행한 경우 29.3%MVC와 26.66%MVC로 통계적으로 유의하지 않았다. 대퇴 이두근(BF) 역시, static half-squat task를 수행했을 때 발생하는 근활성도를 NPMVC, MPMVC, HPMVC로 정규화 데이터를 기반으로 분석을 수행한 경우, 각각 10.42%MVC, 10.07%MVC, 10.4%MVC로 통계적으로 유의하지 않았다. 전경골근(TA) 또한 NPMVC, MPMVC, HPMVC로 정규화 데이터를 기반으로 분석을 수행한 경우, 각각 27.09%MVC, 27.44%MVC, 27.76%MVC로 통계적으로 유의하지 않았다. 비복근(GAS) 역시 유사한 결과를 보였는데, NPMVC, MPMVC, HPMVC로 정규화 데이터를 기반으로 분석을 수행한 경우, 각각 9.87%MVC, 9.76%MVC, 8.77%MVC로 정규화 방식이 static half-squat task 수행 시 근활성도 평가에 큰 영향을 미치지 않음을 보였다.

3.2.2 Dynamic half-squat
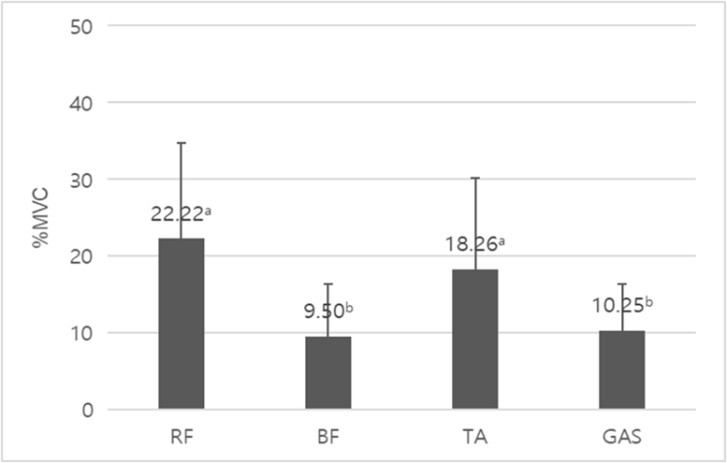
Dynamic half-squat task 수행에서 근육들의 근활성도 차이는 통계적으로 유의한 결과를 보였다(p<0.001). Tukey 사후검정 결과 또한 통계적으로 유의한 차이를 나타냈는데(p<0.05), 대퇴직근(RF)과 전경골근(TA)의 평균 근활성도는 각각 22.22%MVC, 18.26%MVC로, 대퇴 이두근(BF)과 비복근(GAS)의 평균 근활성도 9.50%MVC와 10.25%MVC보다 평균 1.06배에서 최대 1.34배 더 큰 활성도를 보였다(Figure 8). 즉, 동적인 squat task에서도 다리의 전방 근육인 대퇴직근(RF)과 전경골근(TA)의 기여도가 후방 근육인 대퇴 이두근(BF)과 비복근(GAS)보다 더 크게 활성화되는 경향을 보였다.
Dynamic half-squat task 수행에서 압박 수준에 따른 근활성도 차이는 통계적으로 유의하지 않았고(p=0.480), 압박 없음(NP) 시 평균 근활성도는 14.62%MVC, 중간 압박(MP) 시 15.73%MVC, 높은 압박(HP) 시 14.71%MVC로 통계적으로 차이가 없었다. 즉, 각 하지 근육의 센서에 가해지는 압박 수준은 dynamic half-squat task 수행 시 하지 근육들의 근활성도 데이터에 통계적으로 큰 영향을 주지 않는 것으로 분석된다.
근육과 압박 수준에 따른 정규화 방식과의 교호작용 역시 통계적으로 유의하지 않았다(p=0.345) (Figure 9). 즉, 대퇴직근(RF)의 경우, dynamic half-squat task를 수행했을 때 발생하는 근활성도를 압박이 없는 상태에서 측정한 MVC 값(NPMVC)으로 정규화 데이터를 기반으로 분석을 수행한 경우 20.86%MVC를 보였고, 중간 압박 수준에서 측정한 MVC 값(MPMVC)과 높은 압박 수준에서 측정한 MVC 값(HPMVC)으로 각각 정규화 데이터를 기반으로 분석을 수행한 경우 25.32%MVC와 21.50%MVC로 통계적으로 유의하지 않았다. 대퇴 이두근(BF) 역시, dynamic half-squat task를 수행했을 때 발생하는 근활성도를 NPMVC, MPMVC, HPMVC로 정규화 데이터를 기반으로 분석을 수행한 경우 각각 9.89%MVC, 9.38%MVC, 9.89%MVC로 통계적으로 유의하지 않았다.

전경골근(TA) 또한 NPMVC, MPMVC, HPMVC로 정규화 데이터를 기반으로 분석을 수행한 경우 각각 17.72%MVC, 17.59%MVC, 17.59%MVC로 통계적으로 유의하지 않았다. 비복근(GAS) 역시 유사한 결과를 보였는데, NPMVC, MPMVC, HPMVC로 정규화 데이터를 기반으로 분석을 수행한 경우 각각 10.01%MVC, 10.62%MVC, 9.84%MVC로 정규화 방식이 dynamic half-squat task 수행 시 근활성도 평가에 큰 영향을 미치지 않음을 보였다.
3.3 Exoskeleton task data analysis by normalized EMG
3.3.1 Exoskeleton task
Exoskeleton task 수행에서의 근활성도 분석 결과, 정규화 방식에 따른 근활성도 차이는 통계적으로 유의하지 않았다. 압박이 없는 상태에서 측정한 MVC 값(NPMVC)으로 정규화한 경우 5.95%MVC, 중간 압박 수준에서 측정한 MVC 값(MPMVC)으로 정규화한 경우 5.74%MVC, 높은 압박 수준에서 측정한 MVC 값(HPMVC)으로 정규화한 경우 5.99%MVC를 보였으며, 서로 통계적으로 유의하지 않았다. 이는 외골격 착용 시 서로 다른 압박 수준 기반의 정규화 방식(NPMVC, MPMVC, HPMVC)을 적용하더라도 근활성도 평가에 큰 영향을 미치지 않음을 보여준다.
Exoskeleton task 수행에서, 근육과 정규화 방식 간의 교호작용 역시 통계적으로 유의하지 않았다(p=0.935) (Figure 10). 즉, 대퇴직근(RF)의 경우, exoskeleton task 수행 시 발생하는 근활성도를 압박이 없는 상태에서 측정한 MVC 값(NPMVC)으로 정규화한 경우 7.76%MVC, 중간 압박 수준에서 측정한 MVC 값(MPMVC)으로 정규화한 경우 8.22%MVC, 높은 압박 수준에서 측정한 MVC 값(HPMVC)으로 정규화한 경우 8.99%MVC를 보였으며, 서로 통계적으로 유의하지 않았다.

대퇴 이두근(BF) 역시, NPMVC, MPMVC, HPMVC 기반으로 정규화하여 분석한 경우 각각 3.77%MVC, 3.10%MVC, 3.49%MVC로 통계적으로 유의하지 않았다. 전경골근(TA) 또한, NPMVC, MPMVC, HPMVC로 정규화한 경우 각각 6.18%MVC, 6.01%MVC, 6.15%MVC로 통계적으로 유의하지 않았다. 비복근(GAS) 역시 유사한 경향을 보여, NPMVC, MPMVC, HPMVC로 정규화한 경우 각각 10.01%MVC, 10.62%MVC, 9.84%MVC로 서로 통계적으로 유의하지 않았다. 이는 외골격 task 수행 시에도 정규화 방식이 근활성도 평가에 큰 영향을 미치지 않음을 보여준다.
본 연구는 하지 근육의 표면 근전도에 가해지는 압박 수준이 하지 근육의 최대자의적수측근력(MVC) 데이터, 근활성도 분석에 미치는 영향을 분석하고, 분석 결과의 외골격 착용 환경에서 적용 가능성을 평가하고자 수행되었다.
4.1 MVC data
MVC 데이터 분석에서는 근육에 따른 차이에서 허벅지 근육[대퇴직근(RF), 대퇴 이두근(BF)]이 종아리 근육[전경골근(TA), 비복근(GAS)]보다 상대적으로 높은 경향을 보였으며, 허벅지 근육 중 대퇴 이두근(BF)이 가장 높은 MVC를 보였다. 이는 허벅지 근육[대퇴직근(RF): 51.7cm2, 대퇴 이두근(BF): 35.0cm2]의 생리학적 단면적(PCSA: Physiologic Cross-Sectional Area)이 종아리 근육[전경골근(TA): 15.4cm2, 비복근(GAS): 23.7cm2]보다 상대적으로 큰 경향에 기반한 결과로 사료된다(Ward et al., 2009; Charles et al., 2019). 또한, 허벅지 근육 간 비교 시 대퇴직근(RF)의 PCSA가 대퇴 이두근(BF)보다 큼에도 불구하고, MVC 값이 다소 낮은 이유는, 대퇴직근(RF)이 고관절과 무릎을 모두 가로지르는 2관절 근으로서, 고관절 굴곡 상태에서 무릎 신전을 수행할 때 길이-장력 관계(force-length relationship) 상 불리한 근 길이가 형성되기 때문에 본 실험에서 실행한 MVC 측정 방법에 의한 영향으로 사료된다(Herzog et al., 1990).
근육과 압박 수준에 따른 교호작용은 대퇴직근(RF): 0.40~0.44mV, 대퇴 이두근(BF): 0.84~0.89mV, 전경골근(TA): 0.21~0.24mV, 비복근(GAS): 0.25~0.27mV 범위로, 모든 하체 근육에서 근저도 센서에 가해지는 압박 수준에 관계없이 모든 근육들의 MVC 값은 서로 유사한 것으로 평가된다.
4.2 Half-squat task (Static/dynamic)
Half-squat task 분석 결과, 근육 별 근활성도의 차이는 전면 근육인 대퇴직근(RF)과 전경골근(TA)이 후면 근육인 대퇴 이두근(BF)과 비복근(GAS)에 비해 통계적으로 유의하게 높은 활성도를 보였다. 정규화 방식(NPMVC, MPMVC, HPMVC)에 따른 차이는 유의하지 않았으며, 근육과 정규화 방식 간의 교호작용 또한 통계적으로 유의하지 않았으나 대퇴직근(RF)과 전경골근(TA)이 후면 근육인 대퇴 이두근(BF)과 비복근(GAS)보다 높은 경향성은 일관되게 유지되었다. 따라서 근전도 센서에 가해지는 압박 수준이나 정규화 방식의 차이에 상관없이 half-squat task에서의 근육 활성도 분석 결과는 일관되게 유지되었으며, 분석 및 해석 과정에 실질적인 영향을 주지 않음을 시사한다.
근육에 따른 근활성도 차이는 통계적으로 유의하였으며, MVC data 결과[대퇴직근(RF) 26.92%MVC, 대퇴 이두근(BF) 10.22%MVC, 전경골근(TA) 27.76%MVC, 비복근(GAS) 9.17%MVC]와는 상이하게, static/dynamic half-squat task에서는 전면 근육인 대퇴직근(RF)과 전경골근(TA)이 후면 근육인 대퇴 이두근(BF)과 비복근(GAS)보다 높은 활성도를 나타냈다. 이러한 결과는 Nishiwaki et al. (2006)와 Saeterbakken and Fimland (2012)가 안정된 지면에서 수행한 squat에서 보고한 대퇴직근(RF)이 후면 근육[대퇴 이두근(BF), 비복근(GAS)]보다 높은 활성도를 보이는 근활성화 패턴과 유사하다고 보고되었다. 또한, 두 연구에서 체중 이동 혹은 BOSU 볼 사용을 통해 불안정성이 증가하면 후면 근육의 활성도가 안정 조건 대비 크게 증가한다고 보고하였다. 따라서, 평탄한 바닥에서 안정적인 자세로 진행한 본 연구에서의 후면 근육이 상대적으로 낮은 결과를 보인 것으로 해석이 가능하다.
허벅지 근육 간에는 대퇴직근(RF)가 대퇴 이두근(BF)에 비해 평균 1.45배 더 높은 활성도를 나타냈으며, 이는 squat 유형과 부하에 관계없이 대퇴직근(RF)이 대퇴 이두근(BF)보다 높은 활성도를 보인 기존 연구들과 일치한다. Low-load (25~35RM)와 high-load (8~12RM)에서 대퇴직근(RF)이 대퇴 이두근(BF)보다 약 1.47배 높았으며(Schoenfeld et al., 2014), 최대 부하(1RM) 조건에서 front squat와 back squat을 비교한 결과, 대퇴직근(RF)이 대퇴 이두근(BF)보다 약 1.12~1.96배 높았다(Yavuz et al., 2015). Half squat와 full squat을 수행한 결과에서도 대퇴직근(RF)이 대퇴직근(RF)보다 약 1.68~1.86배 높았다(da Silva et al., 2017).
4.3 Exoskeleton task
Exoskeleton task 수행 결과, 정규화 방식(NPMVC, MPMVC, HPMVC)에 따른 근활성도 값은 각각 5.95%MVC, 5.74%MVC, 5.99%MVC로 나타났으며, 통계적으로 유의하지 않았다(p=0.959). 또한, 근육과 정규화 방식 간의 교호작용 역시 유의한 차이가 확인되지 않았으며(p=0.935), 이는 정규화 방식에 따라 근육 간 활성도 차이가 달라지는 현상이 존재하지 않음을 의미한다. 정규화 방식에 관계없이 전면 근육[대퇴즉근(RF), 전경골근(TA)]은 후면 근육[대퇴 이두근(BF), 비복근(GAS)]보다 평균 1.72배, 최대 2.31배 더 높은 활성도를 유지하는 경향을 보이며, half-squat task와 비교 시 근활성도의 값은 감소했지만 동일한 경향성은 유지하였다.
Exoskeleton task를 half-squat task와 비교했을 때 근육에서 근활성도가 감소하는 경향이 나타났다. Half-squat task 대비 평균적으로 대퇴직근(RF) 65.77%, 전경골근(TA) 72.28%, 대퇴 이두근(BF) 65.01% 감소하는 모습을 보였다. 따라서 정규화 방식의 선택이나 압박 수준에 따른 MVC 기준 변화는 하지 근전도 해석 결과에 큰 영향을 주지 않았으며, 외골격 착용 여부에 따른 근활성도 감소는 정규화 방식(NPMVC, MPMVC, HPMVC)에 차이 없이 일관되게 나타났다. 이는 곧 하지 외골격 평가 시, 정규화 방식 및 압박 수준의 영향을 받지 않고 일관된 기준으로 효과를 해석할 수 있음을 보여준다.
본 연구는 하지 외골격 보조 장치의 근활성도 평가에서, 표면 근전도 센서 부착 부위의 압박 수준과 정규화 방식이 최대자의적수측근력(MVC) 및 작업 수행 시 근활성도 분석 결과에 미치는 영향을 정량적으로 규명하였다. 연구 목적은 크게 세 가지로 설정되었으며, 이를 바탕으로 다음과 같은 결과를 도출하였다.
첫째, MVC 분석 결과, 대퇴직근(RF)의 MVC는 0.40~0.44mV, 대퇴 이두근(BF) 0.84~0.89mV, 전경골근(TA) 0.21~0.24mV, 비복근(GAS) 0.25~0.27mV 범위로 나타났으며, 모든 근육에서 압박 수준 변화에 따른 차이는 통계적으로 유의하지 않았다. 이를 통해 근전도 센서 부착 부위의 압박 수준의 변화가 동일 근육 내 MVC 경향성에 실질적인 영향을 미치지 않음이 확인되었다.
둘째, Static/dynamic half-squat task에서 압박 수준과 정규화 방식(NPMVC, MPMVC, HPMVC)에 따른 근활성도 차이는 모두 통계적으로 유의하지 않았다. 정규화 방식과 관계없이 근육 간 활성도 경향은 일관되게 유지되었으며, 이는 작업 환경에서 압박 수준 변화에 맞춘 별도의 MVC 재측정이나 센서 위치 조정 없이도 신뢰성 있는 근활성도 데이터 분석이 가능함을 시사한다.
셋째, 하지 외골격(CEX) 착용 과제에서도 동일한 경향이 확인되었다. 외골격 착용으로 인한 구조물 압박이나 간섭에도 불구하고, 정규화 방식의 차이가 근활성도 경향에 영향을 미치지 않았으며, 이는 실제 외골격 평가 시에도 센서 위치 조정이나 정규화 방식 변경 없이 근활성도 분석이 가능함을 뒷받침한다.
종합하면, MVC 측정, half-squat task, exoskeleton task 전 과정에서 센서 압박 및 정규화 방식의 차이가 하지 근육 근활성도 평가 결과에 통계적으로 유의한 영향을 미치지 않음이 실증되었다. 본 연구 결과는 향후 하지 근전도 실험 설계 및 외골격 평가에서 불필요한 센서 위치 변경과 압박 조건 별 MVC 재측정을 최소화할 수 있는 근거를 제공한다. 다만, 본 연구는 전면 압박 조건과 20~30대 성인을 대상으로 수행되었으므로, 다양한 방향의 압박과 연령층을 포함한 후속 연구가 필요하다고 할 수 있다.
References
1. Avdan, G., Onal, S. and Smith, B.K., Normalization of EMG signals: Optimal MVC positions for the lower limb muscle groups in healthy subjects, Journal of Medical and Biological Engineering, 43(2), 195-202, 2023.
Google Scholar
2. Cardoso, A., Ribeiro, A., Carneiro, P. and Colim, A., Evaluating exoskeletons for WMSD prevention: A systematic review of applications and ergonomic approach in occupational settings, International Journal of Environmental Research and Public Health, 21(12), 1695, 2024.
Google Scholar
3. Champion, S., Barr, C., Lange, B., Lewis, L.K., Russo, M.P., Maeder, A. and Gordon, S., Chair design for older immobile people: Comparison of pressure mapping and manual handling outcomes, Applied Ergonomics, 98, 103581, 2022.
Google Scholar
4. Charles, J.P., Suntaxi, F. and Anderst, W.J., In vivo human lower limb muscle architecture dataset obtained using diffusion tensor imaging, PLOS ONE, 14(10), e0223531, 2019.
Google Scholar
5. Crowell, H.P., Kanagaki, G.B., O'donovan, M.P., Haynes, C.A., Park, J.H., Neugebauer, J.M., Hennessy, E.R., Boynton, A.C., Mitchell, K.B., Tweedell, A.J. and Girolamo, H.J., Methodologies for evaluating the effects of physical augmentation technologies on soldier performance (ARL-TR-8444), Aberdeen Proving Ground, MD: U.S. Army Research Laboratory, 2018.
Google Scholar
6. da Silva, J.J., Schoenfeld, B.J., Marchetti, P.H., Pecoraro, S.L. and Greve, J.M.D., Muscle activation differs between partial and full back squat exercise with external load equated, Journal of Strength and Conditioning Research, 31(6), 1688-1693, 2017.
Google Scholar
7. De Luca, C.J., Gilmore, L.D., Kuznetsov, M. and Roy, S.H., Filtering the surface EMG signal: Movement artifact and baseline noise contamination, Journal of Biomechanics, 43(8), 1573-1579, 2010.
Google Scholar
8. Gefen, A., Risk factors for a pressure-related deep tissue injury: A theoretical model, Medical and Biological Engineering and Computing, 45(6), 563-573, 2007.
Google Scholar
9. Herzog, W., Abrahamse, S.K. and ter Keurs, H.E., Theoretical determination of force-length relations of intact human skeletal muscles using the cross-bridge model, Pflügers Archiv, 416(1), 113-119, 1990.
Google Scholar
10. Huysamen, K., de Looze, M., Bosch, T., Ortiz, J., Toxiri, S. and O'Sullivan, L.W., Assessment of an active industrial exoskeleton to aid dynamic lifting and lowering manual handling tasks, Applied Ergonomics, 68, 125-131, 2018.
Google Scholar
11. Kong, Y.K., Kim, H.Y., Park, S.S., Shim, J.W., Keum, H.J., Son, S.J., Lee, S., Lee, S.K., Chae, U.R. and Shim, H.H., Evaluation for workloads of delivery workers during loading/unloading tasks based on regular, low-floor, and EV newly designed delivery trucks, Journal of Ergonomics Society of Korea, 42(4), 369-384, 2023.
12. Konrad, P., The ABC of EMG: A Practical Introduction to Kinesiological Electromyography, Noraxon Inc. USA, 2005.
Google Scholar
13. Kozlowski, A.J., Bryce, T.N. and Dijkers, M., Time and effort required by persons with spinal cord injury to learn to use a powered exoskeleton for assisted walking, Topics in Spinal Cord Injury Rehabilitation, 21(2), 110-121, 2015.
Google Scholar
14. Langlois, K., Rodriguez-Cianca, D., Serrien, B., De Winter, J., Verstraten, T., Rodriguez-Guerrero, C., Vanderborght, B. and Lefeber, D., Investigating the effects of strapping pressure on human-robot interface dynamics using a soft robotic cuff, IEEE Transactions on Medical Robotics and Bionics, 3(1), 146-155, 2020.
Google Scholar
15. Nishiwaki, G.A., Urabe, Y. and Tanaka, K., EMG analysis of lower extremity muscles in three different squat exercises, Journal of the Japanese Physical Therapy Association, 9(1), 21-26, 2006.
Google Scholar
16. Pillai, M.V., Van Engelhoven, L. and Kazerooni, H., Evaluation of a lower leg support exoskeleton on floor and below hip height panel work, Human Factors, 62(3), 489-500, 2020.
Google Scholar
17. Rafique, S., Rana, S.M., Bjorsell, N. and Isaksson, M., Evaluating the advantages of passive exoskeletons and recommendations for design improvements, Journal of Rehabilitation and Assistive Technologies Engineering, 11, 2024.
Google Scholar
18. Rainoldi, A., Melchiorri, G. and Caruso, I., A method for positioning electrodes during surface EMG recordings in lower limb muscles, Journal of Neuroscience Methods, 134(1), 37-43, 2004.
Google Scholar
19. Rukina, N.N., Kuznetsov, A.N., Borzikov, V.V., Komkova, O.V. and Belova, A.N., Surface electromyography: Its role and potential in the development of exoskeleton, Sovremennye Tehnologii v Medicine (Modern Technologies in Medicine), 8(2), 109-117, 2016.
Google Scholar
20. Saeterbakken, A.H. and Fimland, M.S., Muscle activation of the core during bilateral, unilateral, seated and standing resistance exercise, European Journal of Applied Physiology, 112(5), 1671-1678, 2012.
Google Scholar
21. Schoenfeld, B.J., Ratamess, N.A., Peterson, M.D., Contreras, B., Sonmez, G.T. and Alvar, B.A., Effects of different volume-equated resistance training loading strategies on muscular adaptations in well-trained men, Journal of Strength & Conditioning Research, 28(10), 2909-2918, 2014.
Google Scholar
22. Ward, S.R., Eng, C.M., Smallwood, L.H. and Lieber, R.L., Are current measurements of lower extremity muscle architecture accurate? Clinical Orthopaedics and Related Research, 467(4), 1074-1082, 2009.
Google Scholar
23. Yavuz, H.U., Erdağ, D., Amca, A.M. and Aritan, S., Kinematic and EMG activities during front and back squat variations in maximum loads, Journal of Sports Sciences, 33(10), 1058-1066, 2015.
Google Scholar
24. Zheng, L., Lowe, B., Hawke, A.L. and Wu, J.Z., Evaluation and test methods of industrial exoskeletons in vitro, in vivo, and in silico: A Critical Review, Critical ReviewsTM in Biomedical Engineering, 49(4), 2021.
Google Scholar
PIDS App ServiceClick here!