eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Hyungi Kim
, Rohae Myung
10.5143/JESK.2017.36.6.705 Epub 2017 December 28
Abstract
Objective: The aim of this study is to analyze the work domain and to extract the information requirements based on work domain analysis for ecological interface design of search and rescue helicopter.
Background: Due to Flight at low altitude and many take-off and landings, helicopter's maneuvering have a high probability of human errors. In particular, search and rescue mission requires an effective interface because of helicopter's flight in urgent and risky environments. To cope with unanticipated events in the helicopter's maneuvering environment, work domain analysis has been used to introduce an effective design method, ecological interface design.
Method: With the pilot operating on the search and rescue helicopter, (1) Work domain model was created by performing work domain analysis through abstraction hierarchy and part-whole hierarchy of search and rescue helicopter, (2) then the scenario mapping test was performed to evaluate the work domain model.
Results: The Information requirements for ecological interface design of search and rescue helicopter was extracted in work domain model.
Conclusion: In this study, the constraints and information requirements in the search and rescue helicopter were obtained through the work domain analysis of search and rescue helicopter, and it expand to the area of ecological interface design for helicopter.
Application: The results of this study can improve the interface of search and rescue helicopter currently in use and help to ensure safe flight.
Keywords
Ecological Interface Design (EID) Work Domain Analysis (WDA) Abstraction Hierarchy (AH) Search and rescue Helicopter
항공기에는 사람이 3차원에서 이동할 수 있도록 많은 계기들이 장착되어 있고(Baberg, 2001), 기술이 발전해 감에 따라 자동비행장치, 비행관리시스템, 지상접근경보장치 등 추가 장비들이 장착되었다(Choi et al., 2007). 이러한 이유로 항공기는 더욱 복잡한 시스템으로 발전해 가고 있다.
항공기 같은 복잡한 시스템에서 일어날 수 있는 사건을 Vicente and Rasmussen (1992)은 세 가지로 분류하였다. 첫 번째는 운영자가 충분한 경험과 훈련이 되어 있는 친숙한 사건이며, 두 번째는 친숙하지 않지만 예상할 수 있는 사건으로 운영자는 이에 대한 경험이 없지만, 사전에 훈련이 되어 있을 것이며 설계자들이 이에 대처하기 위한 절차나 장비를 추가했을 것이다. 마지막으로 시스템 설계자 조차 예상하지 못한 사건이다. 이에 대해 운영자는 판단이나 의사 결정의 경험이 전무하고, 시스템 설계자 조차 이에 대해 준비를 해 놓지 못했기 때문에 이 사건에서는 임의적으로 운영자가 처리해야 한다. 따라서 예측하지 못한 사건에서는 인적 요인에 의한 사고가 일어날 가능성이 앞의 두 가지 사건보다 더 클 것이다. 이런 예측하지 못한 사건에서 인적 요인에 의한 사고는 쓰리 마일 아일랜드 사고 같은 거대한 인명 사고로 연결되기도 한다(Burns et al., 2005; Vicente and Rasmussen, 1992).
이러한 이유로 복잡한 시스템에서 발생하는 인적 요인에 의한 사고는 전체 사고에서 75%를 차지하며(Stanton et al., 2009), 항공기에서도 인적 요인으로 인해 발생하는 사고가 전체 항공 사고에서 큰 영역을 차지하고 있다(Mcfadden and Towell, 1999; Shappell et al., 2007; Taneja, 2002).
이러한 인적 요인에 대한 항공 사고의 가능성은 우리가 흔히 접하는 고정익 항공기에서 보다 흔히 헬리콥터라 불리는 회전익 항공기에서 더 높다. 이는 국내 10년간 전체 항공 사고의 80%가 회전익 항공기에서 발생한 사고인 것을 보면 알 수 있다. 이는 회전익 항공기가 저고도로 비관제권에서 주로 비행하며, 고정익 항공기 보다 이착륙 횟수가 많고, 산불진화나 환자공수 등 여러 가지 임무를 수행하기 때문이다(Choi et al., 2007).
특히 회전익 항공기가 수행하는 임무 중 탐색구조는 조난자를 구조하기 위해서 주야간을 가리지 않고, 악천후에도 비행하며, 주로 해상 원거리를 비행하는 등 위험한 환경에서 임무가 이루어지고 있다. 이러한 이유로 탐색구조 임무를 실시하는 회전익 항공기의 인적 요인으로 인한 사고 가능성이 매우 높은 것을 알 수 있다.
인적 요인에 의한 사고를 방지하기 위해 항공 분야에서는 기존 항공 사고에 대한 분석(Shappell et al., 2007)이나 조종사 훈련(Edkins, 2002), 승무원 자원 관리(Helmreich et al., 1999) 등에 대해 연구하고 있으며, 또한 인적 오류 가능성을 줄이기 위해 항공기 인터페이스 디자인에 대한 연구를 실시하고 있다(Stanton et al., 2009; Rasmussen, 1999).
하지만 기존 인터페이스 디자인은 Vicente and Rasmussen (1992)이 분류한 세 가지 중 사전에 예측 가능한 사건에 대한 대처만 가능했다(Burns et al., 2003). 하지만 생태학적 인터페이스 디자인(Ecological Interface Design)의 경우에는 시스템의 제한사항을 표현함으로서 예측하지 못한 사건을 대처할 수 있도록 해준다(Drivalou and Marmaras, 2009; Vicente, 2002).
따라서 본 연구에서는 생태학적 인터페이스 디자인을 인적 오류의 가능성이 큰 탐색구조 회전익 항공기에 적용하고자 한다.
생태학적 인터페이스는 Rasmussen and Vicente (1989)가 처음 소개한 이후로 산업, 의료, 컴퓨터 네트워크, 항공, 지휘통신 등 여러 분야에서 연구되고 있다(Borst et al., 2015; Lee et al., 2010; Mcllroy and Stanton, 2015; Vicente, 2002). 생태학적 인터페이스 디자인은 시스템 운영에 있어서 본질적으로 가지고 있는 제한사항들과 시스템 구조를 효과적으로 시각화 함으로서, 작업자가 문제 해결을 위해 서로 다른 정보 수준으로 쉽게 주위를 이동하며 의사 결정을 할 수 있도록 지원하는 인터페이스 디자인 방법이다(Burns et al., 2003; Rasmussen and Vicente, 1989). 이런 생태학적 인터페이스 디자인은 친숙한 상황에서는 운영자가 일반 절차를 발달시킬 수 있도록 해주고, 낯선 상황에서는 효율적으로 대처할 수 있도록 해 준다(Drivalou and Marmaras, 2009). 또한 예상치 못한 상황에서는 운영자가 효율적으로 문제 해결을 하는데 도움을 준다(Burns et al., 2008). 기존 연구에서는 생태학적 인터페이스 디자인을 적용하여 수행도 뿐만 아니라 작업부하(Workload)의 감소를 확인하였으며(Ko and Myung, 2006; Park and Myung, 2012), 예측하지 못한 상황에서는 상황인식(Situation Awareness)이 더 좋은 것을 확인할 수 있었다(Burns et al., 2008).
이런 생태학적 인터페이스 디자인은 작업영역분석(Work Domain Analysis)을 통해서 이루어진다(Borst et al., 2015). 작업영역은 특정한 운영자나 상황, 과업, 목표 등과는 독립적인 것으로, 운영되는 시스템 그 자체를 의미한다(Vicente, 2002). 이런 작업영역을 분석함으로서 시스템의 구조를 파악할 수 있을 뿐만 아니라 이를 통해 운영자가 시스템이 어떻게 작동하는지를 알려주며, 또한 시스템의 제한사항을 확인함으로서 이를 벗어났을 때 어떻게 운영자가 행동하는지를 알려준다(Burns and Hajdukiewicz, 2004; Rasmussen, 1999).
이런 작업영역분석에 사용되는 도구는 Abstraction Hierarchy (AH)와 Part-Whole Hierarchy이다. AH는 시스템을 "어떻게/왜" 관계로 표현되는 목표-수단(Means-Ends)으로 이루어진 계층으로서 표현하여 작업영역을 모형화 시켜 준다(Mcllroy and Stanton, 2015; Vicente, 2002). 이를 통해 계층의 상위 수준에서는 시스템의 목표를 확인할 수 있으며, 하위 수준을 통해 상위 수준이 어떻게 성취할 수 있는 지를 알려준다(Burns and Hajdukiewicz, 2004). Vicente and Rasmussen (1992)이 제시한 AH의 특성으로는 첫째로 같은 계층에서는 같은 시스템 요소를 다루고, 계층이 다르다면 다른 시스템 수준을 다룬다. 두 번째로 각 계층은 고유의 개념과 원리를 가지고 있으며, 세 번째로는 시스템의 본질적이고 내재적인 속성이 각 계층에 나타난다. 네 번째로 시스템이 적절하게 작동하기 위한 요구사항은 그 하위 수준 작동의 제한사항으로서 표현된다. 마지막으로 계층 수준이 증가할수록 목표에 대한 이해가 높아지고, 낮은 수준으로 갈수록 각 기능의 자세한 이해를 도와 준다. 이런 작업영역에 대한 표현을 함으로서 시스템 운영자는 시스템이 다양한 수준에서 수직적으로 연관된 구조를 볼 수 있고, 다른 수준의 변수들을 검토함으로서 작업영역에 대한 깊은 이해를 발달시킬 수 있다(Burns et al., 2003). 이를 통해 예상하지 못한 상황을 대처할 수 있게 해주는 정보의 근본을 제공하며, 문제 해결을 위한 타당한 구성을 제공한다(Vicente and Rasmussen, 1992). 추가적으로 실시되는 Part-Whole Hierarchy는 구성 요소를 종합하는 과정으로, 분석해야 하는 작업영역의 복잡함에 따라 계층 안에서 단계의 숫자를 조절함으로서 시스템 구조를 이해하기 쉽게 해 준다(Burns and Hajdukiewicz, 2004).
따라서 본 연구에서는 AH와 Part-Whole Hierarchy를 통해 탐색구조 회전익 항공기에 대한 작업영역분석을 실시하고, 이를 통해 생태학적 인터페이스 디자인을 하기 위한 요구 정보를 추출할 것이다.
본 연구에서는 총 3단계로 수행되었다. 첫 번째 단계는 AH와 Part-Whole Hierarchy를 통해 탐색구조 회전익 항공기에 대한 작업영역분석을 실시하여 작업영역모형을 만드는 단계이며, 두 번째 단계에서는 도출된 작업영역모델을 평가하고 보완하는 단계이다. 마지막 단계는 작업영역모형으로부터 생태학적 인터페이스 디자인에 필요한 요구 정보(Information Requirements)를 추출하는 단계이다.
3.1 Work domain analysis
작업영역분석을 위해 탐색구조 회전익 항공기를 운영 중인 공군 소속의 세 명의 조종사와 함께 연구 진행을 하였다. 탐색구조 회전익 항공기에 탑승하는 인원은 조종사 외에 구조사와 정비사 등이 있지만, 항공기 내부에서는 조종사가 의사 결정을 하는 지휘관이며 항공기 인터페이스에 대한 주된 운용자이기 때문에 본 연구에서는 조종사 외 승무원은 포함하지 않았다.
연구에 참가한 조종사들은 10년 이상의 회전익 항공기를 조종한 경험이 있는 교관급 조종사이며, 평균 비행시간은 2,177시간이다. 이들에게 먼저 생태학적 인터페이스 디자인과 작업영역분석에 대한 소개와 설명을 하고, 함께 관련 비행 교범과 비행 절차를 조사하였다. 이를 바탕으로 탐색구조 회전익 항공기의 작업영역분석을 실시하였다.
3.1.1 System boundary
작업영역분석 하기 위해서는 시스템 경계를 설정해야 한다. 시스템 경계는 분석 범위의 설정해 주고, 작업영역의 내 · 외부를 확인할 수 있도록 해 준다. 시스템 경계는 시스템의 목적, 주어진 문제의 종류 및 분석 결과의 활용 방법 등에 따라 달라질 수 있으며, 이에 대한 작업영역분석의 결과도 시스템 경계에 따라 변동될 것이다(Burns and Hajdukiewicz, 2004).
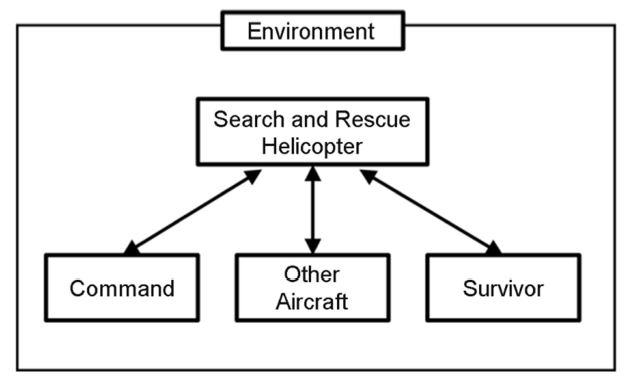
본 연구는 탐색구조 회전익 항공기의 안전한 비행 지원을 위한 생태학적 인터페이스 디자인을 위한 것이기 때문에 전시 및 군사적인 목적은 배제하였다. 전시 및 군사적인 목적이 들어간다면 안전성에 대한 고려는 줄어들 것이며, 해당 작전의 성공이 주 목표로 설정될 것이다. 이는 탐색구조 회전익 항공기 그 자체를 중심으로 시스템 경계가 설정되는 것이 아닌, 해당 전략 및 작전에 따라 시스템 경계가 유동적으로 바뀔 것이다. 따라서 본 연구에서는 전시 및 군사적인 목적을 배제하고 탐색구조 회전익 항공기의 안전한 비행 지원을 목적으로 하여 시스템 경계를 설정하였다. 탐색구조 회전익 항공기의 시스템 경계는 탐색구조 회전익 항공기와 타항적, 지휘소, 조난자, 자연환경을 포함한다(Figure 1). 조난자를 탐색하여 구조하는 것이 탐색구조 항공기의 목적이기 때문에 조난자를 포함하였으며, 지휘소와 타 항공기에서의 지시나 정보를 수집할 수 있기 때문에 이를 포함시켰다. 또한 탐색구조 회전익 항공기나 다른 요소들이 기상이나 장애물, 바람 같은 자연환경에 영향을 받을 수 있기 때문에 이를 포함하였다.
3.1.2 Abstraction hierarchy
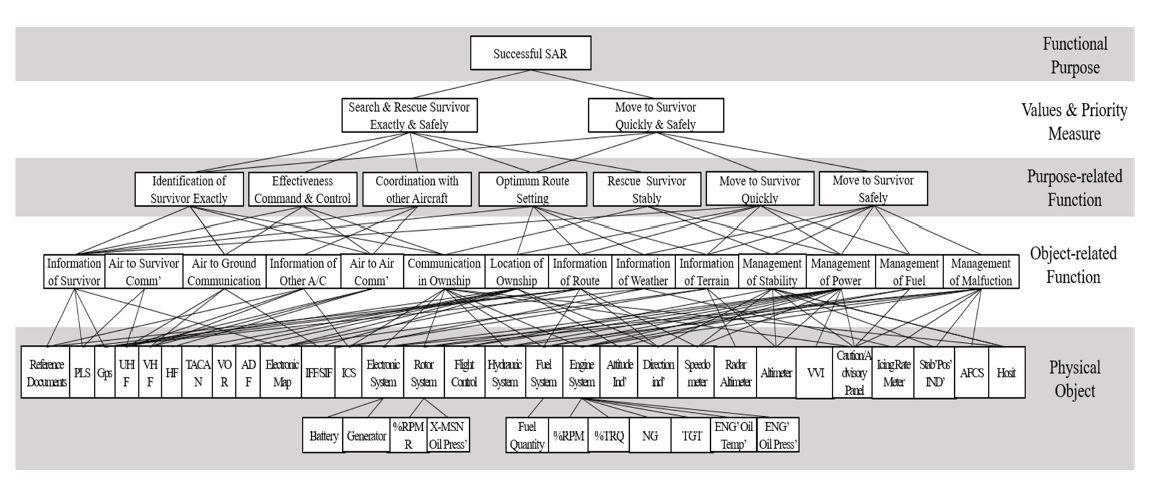
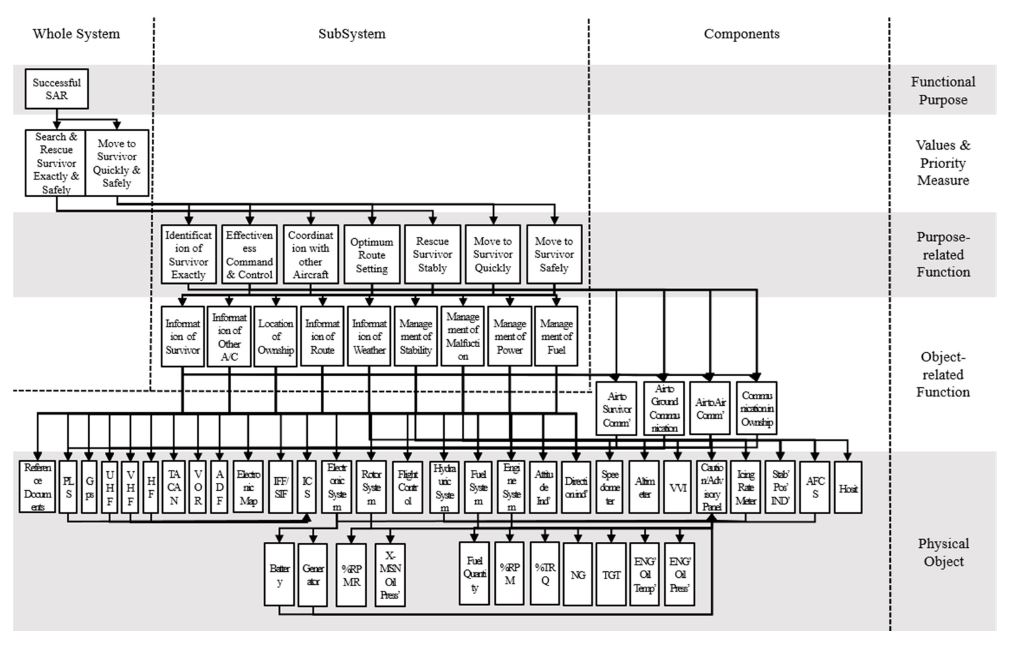
작업영역분석의 도구로서 사용되는 AH는 총 5개(Functional purpose, Values and priority measures, Purpose-related function, Object-related processes, Physical object)의 계층으로 이루어져 있다(Jenkins et al., 2008; McIlroy and Stanton, 2011).
가장 높은 상위 수준인 Functional Purpose는 시스템의 존재 이유 또는 목적을 나타낸다. 탐색구조 회전익 항공기에서의 최종 목표는 조난자에 구조하여 안전하게 복귀시키는 것이기 때문에, 조난자에 대한 탐색 및 구조의 성공으로 Functional Purpose를 정하였다. 다음으로 Values and priority measures는 시스템이 Functional purpose를 달성할 수 있는지 판단할 수 있는 기준이다. 따라서 조난자의 성공적인 탐색구조를 달성하는 데 판단할 수 있는 기준으로 조난자까지 빠르고 안전한 이동과 정확하고 안정된 탐색 및 구조를 정하였다. 세 번째인 Purpose-related function은 시스템의 목적을 성취하기 위해 필요한 일반적인 기능, 역할, 정보를 의미한다. 필요한 기능 및 정보로는 조난자의 정확한 위치, 효율적인 지휘통신, 타항적과의 협동, 최적의 경로 선정 등을 도출하였다. 네 번째로 Object-related processes는 작업 시스템을 구성하는 Physical Object가 상위 단계를 충족시키기 위해서 표현해야 하는 정보나 절차, 기능 등으로서, 조난자 관련 정보, 조난자와의 통신, 지휘소와의 통신, 타항적과의 통신, 항공기 내부에서의 커뮤니케이션, 경로 정보, 기상 정보, 항공기 안정성 관리 등을 도출하였다. 다섯 번째로 Physical object는 시스템의 물리적 요소를 나타내며, 여기에는 조난자 위치정보장치, 전술항법장치, 전자지도, 내부통신시스템, 비행조종장치, 유압장치, 고도계, 속도계 등을 도출하였다.
마지막으로 도출된 각 수준들을 목표-수단(Means-End)관계를 이용하여 연결하였다(Figure 2). 이를 통해 상위 수준의 요소들은 근접한 하위 수준의 요소들로 달성할 수 있다는 것을 알 수 있으며, 하위 수준의 요소들은 인접한 상위 수준의 요소들을 통해 왜 필요한 것인지를 설명할 수 있다.
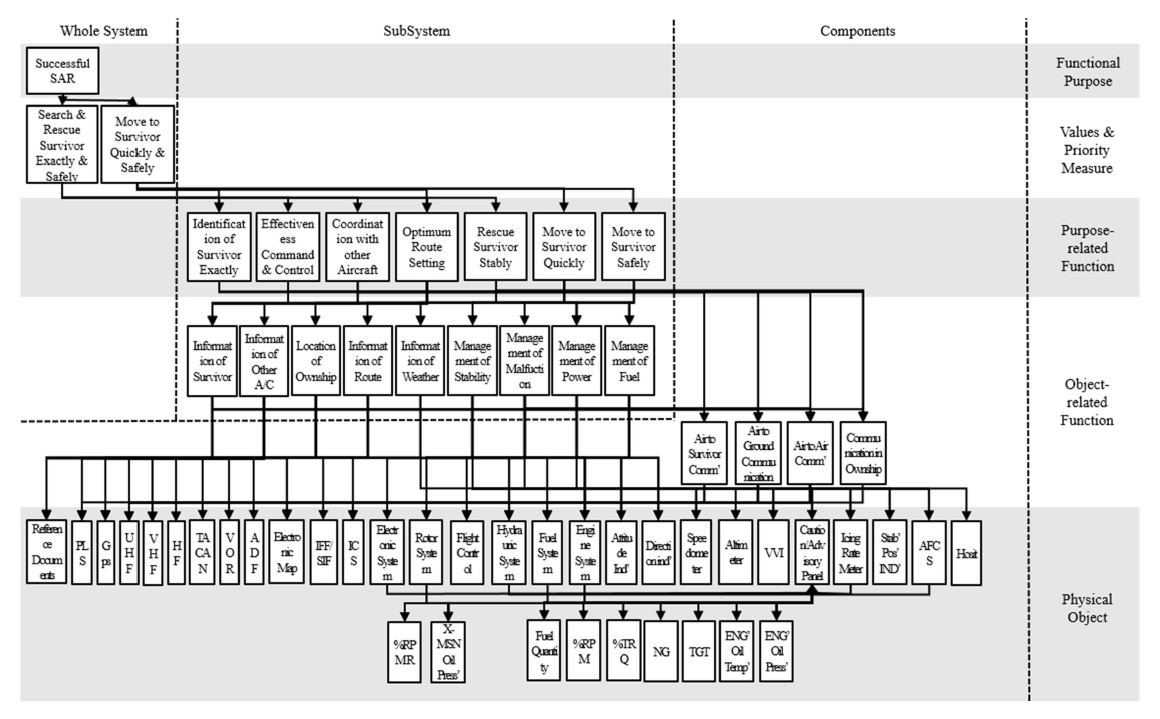
이에 추가적으로 Part-Whole Hierarchy를 실시하여 작업영역모형을 작성하였다(Figure 3). 이는 두 번째의 Hierarchy로서 각 요소를 통합적으로 시현하는 것으로(Burns and Hajdukiewicz, 2004), 작업영역을 시스템과 하부 시스템(Subsystem), 요소(Component)로 구분하여 시스템이나 하부 시스템 수준에는 개요나 상태의 정보를 지시해주고, 요소에서는 세밀한 정보나 조작 형태의 정보를 시현해 준다. 보통 AH와 Part-Whole Hierarchy를 같이 표현할 때는 AH는 수직축으로 Part-whole Hierarchy는 수평축으로 표현한다(Burns and Hajdukiewicz, 2004).
3.2 Evaluation of work domain model
위에서 도출한 작업영역모형을 평가하기 위해 Scenario Mapping (Burns et al., 2001; Burns and Hajdukiewicz, 2004)을 실시하였다. Scenario Mapping은 작업영역모형을 확인하기 위한 유용한 기술로서, 모형이 작업영역을 얼마나 잘 반영하는 지를 알 수 있으며, 이를 통해 모형 작동에 대한 입증을 하기 위해 사용하는 방법이다(Burns and Hajdukiewicz, 2004). Scenario Mapping은 시스템이 운영되는 특정 상황을 부여하여 이에 대한 의사 결정시 요구되는 상황에 대한 필요 요소 및 제한사항이 작업영역모형에 잘 반영되었는 지를 확인하는 방법이다. 본 연구에서는 작업영역분석에서 참석한 교관 조종사 3명과 같이 이를 수행하였다.
작업영역모형을 평가하기 위한 탐색구조 회전익 항공기에 대한 시나리오는 Table 1과 같이 정하였다. 시나리오 1번부터 9번까지는 조난자를 구조하기 위한 단계 중 일반적으로 수행하는 단계를 표현하였으며, 10번과 11번은 복귀 중 기상으로 인한 조종환경 변화를 표현하였다. 12번부터 14번까지는 비행 중에 일어나는 결함에 대해 표현하였다.
|
NO. |
Scenario |
|
1 |
Take off on the runway (0KTS, 0FT → 80KTS, 1000FT) |
|
2 |
Airspeed increase at 1,000ft (80KTS → 120KTS) |
|
3 |
Climb from 1,000ft to 2,000ft (Maintaining
120KTS) |
|
4 |
Change route by orders of command |
|
5 |
Change route by orders of aircraft
remained in the air at rescue point |
|
6 |
Change route by signal of survivor |
|
7 |
Decrease airspeed and altitude for
rescue of survivor (2000FT, 120KTS → 500FT, 80KTS) |
|
8 |
Select route for approach after
detect survivor |
|
9 |
Rescue survivor by hoist (To
maintain 80FT) |
|
10 |
Change route during return to base
due to rain |
|
11 |
Change to instruction flight rule
due to rain |
|
12 |
Malfunction of Left engine during
cruise flight |
|
13 |
Battery caution light on during
cruise flight |
|
14 |
Malfunction of UHF radio during
cruise flight |
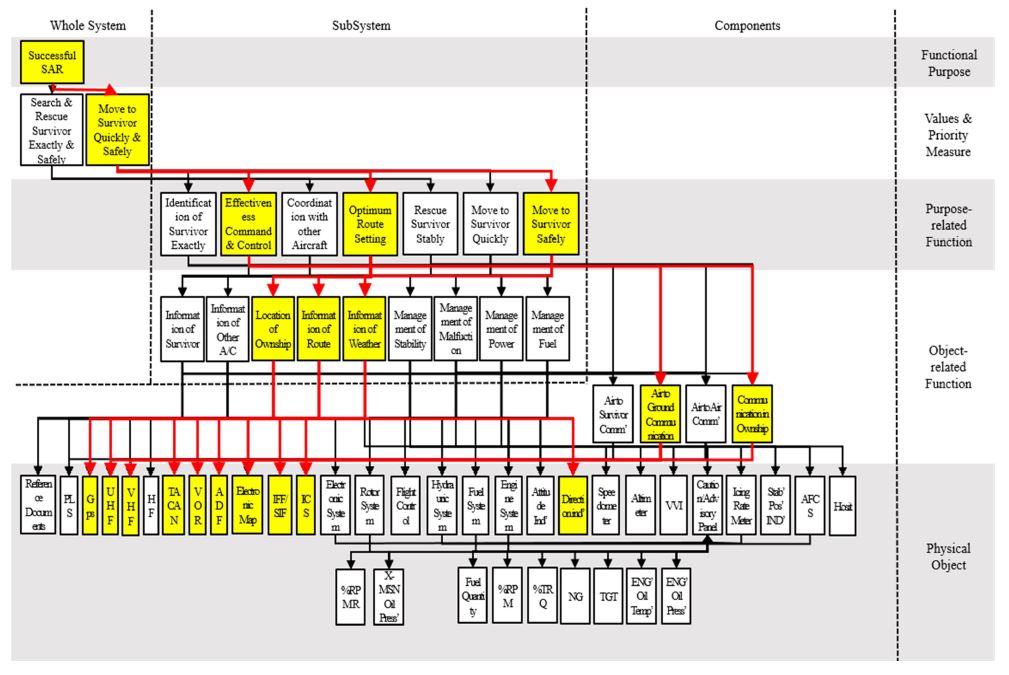
Figure 4는 10번에 해당하는 Scenario Mapping에 대한 예시를 나타내고 있다. 이를 통해 Values and priority measures 중 "빠르고 안전한 조난자까지 이동"에서 purpose-related function의 "효율적인 지휘통신"과의 연결선을 추가하였으며, Physical object에 발전기를 추가하는 등 작업영역모형을 수정하였다. 수정된 작업영역모형에 다시 Scenario Mapping을 수행하였으며, 완성된 작업영역모형(Figure 5)이 탐색구조 회전익 항공기의 작업영역을 충분히 표현하여 본 연구에 적절한 것으로 확인되었다.
3.3 Extracting information requirements
Scenario Mapping을 통해 검증된 작업영역모형을 바탕으로 생태학적 인터페이스 디자인에 필요한 요구 정보(Information Requirements)를 추출하였다(Burns and Hajdukiewicz, 2004; Burns et al., 2005). 요구 정보를 추출할 때에도 작업영역분석과 모형에 대한 평가를 수행한 교관 조종사와 같이 수행하였다.
Table 2는 완성된 작업영역모델을 이용하여 추출된 요구 정보이다. 탐색구조 회전익 항공기의 Functional purpose와 Values and priority measures를 충족시키기 위한 Purpose-Related Function에서의 요구 정보는 경로상의 기상 및 장애물 정보, 조난자 위치에 따른 경로 정보, 전반적이 통신 상태와 메시지 내역 정보 등을 시스템의 목적을 달성하기 위한 정보들이 추출되었으며, Objected-Related Function에서는 조난자에 대한 위치 및 정보, 타항적에 대한 정보, 항공기 경로 정보, 기상에 대한 정보, 잔여연료량, 지휘소와의 통신 상태 등 임무 수행을 위한 정보들이 추출되었다. Physical Object에서 추출된 정보는 엔진 상태, 전술항법장치의 지시치, 초단파 전방향식 무선표지 장치의 지시치, 현재 속도, 고도 등 현재 장치의 상태나 항공기 상태에 대한 정보가 추출되었다.
추출된 요구 정보 중 하위 수준의 요구 정보는 기존 탐색구조 항공기 인터페이스에서 이미 표시되고 있다는 것을 알 수 있었으나, 상위 수준으로 올라갈수록 해당 정보는 기존 항공기 인터페이스에서는 표현하지 못하는 것을 알 수 있었다. 예를 들면 속도나 고도 같은 Physical Object의 정보 같은 경우에는 기존 항공기에 장착된 속도계나 고도계를 통해 그 정보를 얻을 수 있으나, Objected-Related Function의 정보 중 풍향 및 풍속 정보는 위성항법장비와 속도계, 방향지시계 등을 종합적으로 판단하여 그 정보를 얻을 수 있다. 따라서 상위 수준 올라갈수록 그 정보를 얻기 위해서는 다수의 계기를 이용해야 한다. 하위 수준의 정보는 단순히 한 가지 계기를 지각(Perception)하는 수준이기 때문에 정신적 작업부하(Mental Workload)가 낮지만, 비교를 통해 통합적으로 분석하여 판독하는 상위 수준의 정보는 여러 가지 계기의 정보를 저장하고 인출하는 과정이 필요하기 때문에 정신적 작업부하가 높을 것이다(Jo et al., 2012). 따라서 추출된 상위 수준의 요구 정보가 항공기 인터페이스에서 표현된다면 이에 따른 정신적 작업부하 측면에서 이점이 있을 것이다.
예를 들면 "Physical Object"의 요구 정보 중 항공기 방향이나, 대지 속도, 계기 속도는 현재 공군에서 운영 중인 탐색구조 회전익 항공기인 HH-60P에서는 각각 방향지시계, GPS, 속도계에서 시현되고 있기 때문에 조종사는 한번 관측으로 이를 파악할 수 있다. 하지만 상위 단계인 "Objected-Related Function"에서의 풍향, 풍속의 경우에는 이를 시현해 주는 장비가 설치되어 있지 않기 때문에 조종사는 현재 항공기 방향과 대지 속도, 계기 속도 등을 종합적으로 분석하여 현재 풍향과 풍속을 계산해야 한다. 하지만 역동적인 비행환경에서 이런 여러 가지 계기를 종합적으로 판독하고 분석하는 것은 조종사에게 작업부하를 부과할 것이다. 하지만 "Objected-Related Function"에서 추출된 요구 정보인 풍향 및 풍속을 계기에서 표현해 준다면 조종사의 이런 작업부하는 감소할 것이며, 이에 따른 수행도도 증가할 것이다.
|
Work domain level |
Information requirement |
|
Purpose-related function |
Information of weather and terrain on the route, Route information
based on location of survivor, Comprehensive state of communication between
command and other aircraft, |
|
Objected-related function |
Information of survivor, Location of survivor, Information of
other aircraft, Location of ownship, Route information, Direction of the wind,
Wind speed, The height of the cloud ceiling, Weather, Obstacle, Stability of
altitude and attitude, Malfunction of aircraft, State of power, Residual fuel
quantity, Duration of flight, State of communication with survivor or command
or other aircraft |
|
Physical object |
State of hoist, Residual length of hoist, State of AFCS, Position
of Stabiliator, Amount of icing, Sea level, Absolute altitude, Rate of climb
or descent, Indicated air speed, Ground speed, Direction, attitude, State of
engine, State of engine oil, Fuel quantity, State of hydraulic system, Rotor
speed, State of X-MSN oil, state of battery or generator, State of inside or
outside communication, State of IFF/SIF, Electronic map, Direction and
distance of ADF/TACAN/VOR, Frequency of HF/VHF/UHF, State of GPS/PLS |
본 연구에서는 AH와 Part-Whole Hierarchy를 이용하여 탐색구조 회전익 항공기의 작업영역분석을 실시하고 작업영역모형을 구성하였다. 그리고 검증된 작업영역모형을 바탕으로 생태학적 인터페이스 디자인에 필요한 요구 정보를 추출하였다.
먼저 생태학적 인터페이스 디자인을 위한 AH는 탐색구조 회전익 조종사가 항공기 시스템을 이해하는 데 있어서 단순히 계기만을 보고 판단하는 것에서 벗어나, 시스템 구조의 물리적 영역인 가장 낮은 단계에서 목표 지향적인 높은 단계까지 이해 함으로서 복잡한 구조를 간단하게 이해할 수 있도록 하여 복잡함에 대처할 수 있도록 해 주고, 또한 문제 해결에 있어서는 목표 지향적인 AH를 통해서 해당 문제와 연관된 목표를 찾고 그것에 해당되는 하위 수준으로 내려오는 과정을 거침으로서 문제 해결을 효과적으로 할 수 있게 도와 준다(Vicente and Rasmussen, 1992).
그리고 AH를 통해서 완성된 탐색구조 회전익 항공기의 작업영역모형은 특정 목표나 상황과는 독립적으로 이기 때문에(Mcllroy and Stanton, 2015; Vicente, 2002), 조종사들은 임무 수행할 때에 각 단계나 상황에 구애 받지 않고 항공기 시스템의 정보 구조에 대한 이해를 발달시킬 수 있을 것이다(Burns et al., 2003). 이를 통해 일반적인 상황에서의 절차를 보강할 수 있을 뿐만 아니라, 비행시 예상치 못한 상황에서 문제 해결에 필요한 기본 지식을 얻을 수 있을 것이다(Drivalous and Marmaras, 2009).
또한 작업영역모형에서 추출된 요구 정보을 이용하여 생태학적 인터페이스 디자인을 하였을 때, 기존 연구에서는 수행도 뿐만 아니라 작업부하(Ko and Myung, 2006; Park and Myung, 2012)에 대한 이점이 있었다. 본 연구에서도 하위 수준에서 추출된 요구 정보는 기존 항공기 인터페이스에서 하나의 계기로서 표현되나, 상위 수준으로 올라갈수록 여러 가지 계기를 통합적으로 종합하여 판단해야 하기 때문에 정보를 저장 및 인출하는 인력의 과정들로 인한 작업부하가 생기는 것을 알 수 있다. 따라서 추출된 상위 수준의 요구 정보들을 항공기 인터페이스가 시현할 수 있도록 디자인 한다면, 정보를 저장하고 인출하는 과정이 생략되어 정신적 작업부하가 감소하는 효과를 얻을 수 있을 것이다(Jo et al., 2012).
따라서 도출된 탐색구조 회전익 항공기의 작업영역모형과 추출된 요구 정보를 이용하여 항공기 인터페이스를 디자인 한다면 효과적인 인터페이스를 디자인 할 수 있을 것이다. 또한 기존 항공기에 이를 적용한다면 현재 인터페이스에 대한 부족한 면을 알 수 있으며, 이를 통해 안전한 비행을 지원할 수 있는 인터페이스로 개선할 수 있을 것이다.
본 연구에서는 작업영역모형과 추출된 요구 정보를 이용하여 실제 항공기 인터페이스에 대한 디자인을 수행하지는 않았다. 하지만 본 연구를 통해 탐색구조 회전익 항공기에 대한 생태학적 인터페이스 디자인의 적용 가능성을 확인할 수 있었으며, 이를 통해서 그 적용 영역을 회전익 항공기로 확대할 수 있었다.
생태학적 인터페이스 디자인은 복잡하고 역동적인 시스템의 디스플레이 개발을 위해 적용되는 디자인 방법으로서, 항공 분야 외에도 여러 분야에서 적용되고 있다. 본 연구에서는 인적 요인에 의한 항공 사고 가능성이 큰 탐색구조 회전익 항공기의 생태학적 인터페이스 디자인을 적용하기 위해 작업영역분석을 실시하고, 요구 정보를 도출하였다. 이를 이용한다면 기존 항공기 인터페이스를 안전성이 향상되도록 개선할 수 있을 뿐만 아니라, 새로운 항공기 개발에서도 효과적인 인터페이스 디자인을 할 수 있을 것이다.
추후 연구에서는 본 연구에서 도출된 작업영역모형과 요구 정보를 이용하여 실제 항공기 인터페이스에 대한 디자인을 실시해야 할 것이며, 그 사용성에 대한 평가 역시 이루어져야 할 것이다.
References
1. Baberg, T.W., Man-machine-interface in modern transport systems from an aviation safety perspective, Aerospace Science and Technology, 5(8), 495-504, 2001.
Crossref
Google Scholar
2. Borst, C., Flach, J.M. and Ellerbroek, J., Beyond ecological interface design: Lessons from concerns and misconception, IEEE Transactions on Human-Machine Systems, 45(2), 164-175, 2015.
Crossref
Google Scholar
3. Burns, C.M., Bryant, D.J. and Chalmers, B.A., "Scenario mapping with work domain analysis", In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 45 (No. 4, pp. 424-428), Los Angeles, CA, 2001.
Crossref
Google Scholar
4. Burns, C.M., Bryant, D.J. and Chalmers, B.A., Boundary, purpose, and values in work-domain models: Models of naval command and control, IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 35(5), 603-616, 2005.
Crossref
Google Scholar
5. Burns, C.M. and Hajdukiewicz, J., Ecological Interface Design, CRC Press, 2004.
Crossref
Google Scholar
6. Burns, C.M., Kuo, J. and Ng, S., Ecological interface design: a new approach for visualizing network management, Computer Networks, 43(3), 369-388, 2003.
Crossref
Google Scholar
7. Burns, C.M., Skraaning Jr, G., Jamieson, G.A., Lau, N., Kwok, J., Welch, R. and Andresen, G., Evaluation of ecological interface design for nuclear process control: situation awareness effects, Human Factors, 50(4), 663-679, 2008.
Crossref
Google Scholar
8. Choi, S., Choi, Y. and Lee, Y., A Study on the Situation Awareness of Helicopter Pilots, Journal of The Korean Society for Aeronautical & Space Sciences, 15(1), 54-60, 2007.
Crossref
Google Scholar
9. Drivalou, S. and Marmaras, N., Supporting skill-, rule-, and knowledge-based behaviour through an ecological interface: An industry-scale application, International Journal of Industrial Ergonomics, 39(6), 947-965, 2009.
Crossref
Google Scholar
10. Edkins, G.D., A review of the benefits of aviation human factors training, Human Factors and Aerospace Safety, 2(3), 201-216, 2002.
Crossref
Google Scholar
11. Helmreich, R.L., Merritt, A.C. and Wilhelm, J.A., The evolution of crew resource management training in commercial aviation, The International Journal of Aviation Psychology, 9(1), 19-32, 1999.
Crossref
Google Scholar
12. Jenkins, D.P., Stanton, N.A., Salmon, P.M., Walker, G.H. and Young, M.S., Using cognitive work analysis to explore activity allocation within military domains, Ergonomics, 51(6), 798-815, 2008.
Crossref
Google Scholar
13. Jo, S., Myung, R. and Yoon, D., Quantitative prediction of mental workload with the ACT-R cognitive architecture, International Journal of Industrial Ergonomics, 42(4), 359-370, 2012.
Crossref
Google Scholar
14. Ko, S.M. and Myung, R.H., Ecological Interface Design for Air Traffic Control Display, Journal of the Ergonomics Society of Korea, 25(4), 103-113, 2006.
Crossref
Google Scholar
15. Lee, S.W., Lee, B.G., Back, J.S., Jo, S.S. and Myung, R.H., Applying Work Domain Analysis for Ecological Interface Design of Safety Monitoring System in the Urban Railway Station, Journal of the Korean Society for Railway, 13(3), 264-270, 2010.
Crossref
Google Scholar
16. McFadden, K.L. and Towell, E.R., Aviation human factors: a framework for the new millennium, Journal of Air Transport Management, 5(4), 177-184, 1999.
Crossref
Google Scholar
17. McIlroy, R.C. and Stanton, N.A., Getting past first base: Going all the way with Cognitive Work Analysis, Applied Ergonomics, 42(2), 358-370, 2011.
Crossref
Google Scholar
PubMed
18. McIlroy, R.C. and Stanton, N.A., Ecological interface design two decades on: Whatever happened to the SRK taxonomy?, IEEE Transactions on Human-Machine Systems, 45(2), 145-163, 2015.
Crossref
Google Scholar
19. Park, Y.H. and Myung, R.H., A Study on Ecological Interface Design for Navy Ship's Radar Display, Journal of the Ergonomics Society of Korea, 31(2), 353-362, 2012.
Crossref
Google Scholar
20. Rasmussen, J., Ecological interface design for reliable human-machine systems, The International Journal of Aviation Psychology, 9(3), 203-223, 1999.
Crossref
Google Scholar
21. Rasmussen, J. and Vicente, K.J., Coping with human errors through system design: implications for ecological interface design, International Journal of Man-Machine Studies, 31(5), 517-534, 1989.
Crossref
Google Scholar
22. Shappell, S., Detwiler, C., Holcomb, K., Hackworth, C., Boquet, A. and Wiegmann, D.A., Human error and commercial aviation accidents: an analysis using the human factors analysis and classification system, Human Factors, 49(2), 227-242, 2007.
Crossref
Google Scholar
23. Stanton, N.A., Salmon, P., Harris, D., Marshall, A., Demagalski, J., Young, M.S., Waldmann, T. and Dekker, S., Predicting pilot error: testing a new methodology and a multi-methods and analysts approach, Applied Ergonomics, 40(3), 464-471, 2009.
Crossref
Google Scholar
24. Taneja, N., "Human factors in aircraft accidents: a holistic approach to intervention strategies", In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 46 (No. 1, pp. 160-164), Los Angeles, CA, 2002.
Crossref
Google Scholar
25. Vicente, K.J., Ecological interface design: Progress and challenges, The Journal of the Human Factors and Ergonomics Society, 44(1), 62-78, 2002.
Crossref
Google Scholar
PubMed
26. Vicente, K.J. and Rasmussen, J., Ecological interface design: Theoretical foundations, IEEE Transactions on Systems, Man, and Cybernetics, 22(4), 589-606, 1992.
Crossref
Google Scholar
PIDS App ServiceClick here!