eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Kyudong Park
, Jiyoung Kwahk
, Sung H. Han
, Minseok Song
, Dong Gu Choi
, Hyeji Jang
, Dohyeon Kim
10.5143/JESK.2018.37.4.459 Epub 2018 September 01
Abstract
Objective: The objective of this study is to investigate the intrusive feeling caused by a Lane Keeping Assistance System (LKAS) and measure it objectively through the sensor log data of a vehicle.
Background: LKAS, one of the Advanced Driver Assistance System (ADAS), directly intervenes in the steering wheel control to assist the driver to keep the lane. Due to the torque generated by the LKAS, the driver has a different and undesirable feeling from a usual situation, which can affect the driving experience. Nevertheless, the performance of the LKAS in most studies focused only on how well the system keeps the lane.
Method: Through an actual driving test using a test vehicle equipped with an LKAS, two ADAS experts and two human factor experts observed the intrusive feeling while collecting sensor log data at the same time. After the types of the intrusive feeling were classified, variables that could account for the feeling were derived. Then, this study compared the data collected from the vehicle with and without the intrusive feeling.
Results: Three types of the intrusive feeling were observed: abrupt lateral change, steering wheel vibration, and heavy steering. The lateral speed (LS), the high-pass filtered steering angle (FSA), and the interrupt torque (IT) were then derived as the variables that could explain each feeling, respectively. It is found that the patterns of the derived variables are different in driving with and without the intrusive feeling.
Conclusion and Application: The intrusive feeling found in this study can be used as a performance index in the development stage of the LKAS. It will be helpful to systematically reduce the intrusive feeling.
Keywords
ADAS LKAS Driving experience Measurement
자동차 부품의 전자화 및 IT 신기술을 기반으로 운전자의 안전 및 편의성을 증대시키려는 노력이 이어지면서, 첨단 운전자 보조 시스템(ADAS, Advanced Driver Assistance System)에 대한 연구가 전세계적으로 활발히 진행되어 왔다. 첨단 운전자 보조 시스템은 자동차에 장착된 다양한 센서를 활용하여 위험 상황을 시각, 청각, 촉각 등을 통해 운전자에게 미리 알려주거나, 한단계 나아가 적극적인 제어를 통해 운전자가 보다 안전하게 주행할 수 있도록 돕는 시스템이다(Heo, 2009; Cho et al., 2013). 현재 첨단 운전자 보조 시스템은 Society of Automotive Engineers (SAE, 2016)가 정의한 자동차 자동화 레벨 중 1단계(Driver Assistance) 및 2단계(Partial Automation)에 해당하며, 첨단 운전자 보조 시스템을 구성하는 기반 기술이 고도화되면서 단계별로 완전 자율주행에 근접하게 발전될 것으로 예상되고 있다.
첨단 운전자 보조 시스템을 작동 유형별로 분류하면 운전자 정보제공, 종 방향 사고회피, 횡 방향 사고회피와 같이 3가지로 나눌 수 있다(Cho et al., 2013). 먼저, 운전자에게 정보를 제공하는 시스템으로는 야간 주행 시 전조등의 패턴을 자동으로 변경하여 운전자의 편의성과 시인성을 극대화한 적응형 주행 변환 전조등(ADB, Adaptive Driving Beam Headlamp)과 자동차의 운행 방향에 맞추어 전조등이 비추는 방향을 조절하는 자동배광 가변형 전조등 시스템(AFLS, Adaptive Front-Lighting System)이 있다(Schmidt et al., 2007).
종 방향 사고회피 기능을 수행하는 시스템으로는 전방에서 주행 중인 다른 차량과의 추돌 사고 위험이 있을 때 이를 알려주는 전방 충돌 경고 장치(FCW, Forward Collision Warning system) (Olney et al., 1995), 경고 후에도 운전자의 반응이 없거나 충돌이 불가피하다고 판단될 때 피해를 최소화하기 위해 자동적으로 차량을 감속시키는 자동 비상 제동 장치(AEB, Advanced Emergency Braking system) (Schram et al., 2013), 앞 차량의 속도에 따라 자동적으로 속도를 조절하여 안전거리를 유지하는 적응형 순항 제어 장치(ACC, Adaptive Cruise Control)가 있다(Moon et al., 2009).
마지막으로, 횡 방향 사고회피 기능을 수행하는 시스템으로는 과속, 노면 상태에 대한 운전자의 판단 오류, 급작스런 조향 조작 등의 이유로 차량 제어를 상실했을 때 제동 장치의 제어를 통해 차량 자세의 안정성을 높이는 자동차 안정성 제어 장치(ESC, Electronic Stability Control) (Lu et al., 2007), 운전자의 의도와 달리 차선을 이탈할 위험이 있을 때 이를 알려주는 차선 이탈 경고 시스템(LDWS, Lane Departure Warning System) (Lee et al., 1999), 조향 장치를 직접 제어하여 자동으로 차선 이탈을 막는 차선 유지 보조 시스템(Lane keeping assistance system) (Risack et al., 2000)이 있다.
첨단 운전자 보조 시스템 중 일부는 단순 알림 기능을 넘어 운전의 조작에 직접적으로 관여하게 되는데, 특히 차선 유지 보조 시스템의 경우 차선을 벗어나지 않기 위해 발생시키는 시스템의 토크와 운전자의 핸들 조작이 동시에 발생하는 협력 제어(Shared control) (Mulder et al., 2015)의 특징을 나타낸다. 이러한 차선 유지 보조 시스템의 개입은 운전자의 핸들 조작 작업을 변화시키며(Strand et al., 2014; Cho et al., 2017), 핸들 조작에 대한 운전자의 의사결정에도 변화를 주기 때문에 차선 유지 보조 시스템의 개입 및 운전자와의 상호작용 양상에 따라 사용자 경험 또한 많은 영향을 받을 것으로 판단할 수 있다. 시스템으로 인해 발생하는 이질감은 운전자의 감각 기관으로 인지할 수 있는 평소와 다른 느낌으로 정의되며, 운전 경험에 부정적인 영향을 미친다. 평가 차량이 차로의 중심을 잘 유지하더라도 이러한 이질감은 차선 유지 보조 시스템에 대한 전반적인 만족도를 저하시킬 수 있기 때문에 이를 고려하여 시스템을 디자인하는 것이 매우 중요하다. 본 연구에서는 차선 유지 보조 시스템의 개입으로 인해 운전자가 느끼는 이질감에 초점을 맞추고자 한다.
본 연구는 크게 두 가지 관점에서 기존 연구 대비 학술적, 실용적 의미를 갖는다. 첫째, 이질감에 관한 연구는 시뮬레이션을 통한 실험실 환경에서는 재현과 검증의 정확도에 한계가 있다. 본 연구는 양산용 차량의 최종 테스트 단계에 해당하는 시험용 차량을 이용하여 실차 주행 환경에서 이질감을 재현하고, 다양한 이질감의 유형을 파악한 것이 가장 큰 특징이라 할 수 있다.
둘째, 차선 유지 보조 시스템의 이질감은 해당 기업 고유의 특성을 반영한 테스트 전문가의 판단 기준에 따라 최종 평가 후 확정되는 것이 일반적이었으나, 본 연구에서는 차량에서 계측되는 센서 데이터를 사용하여 이질감을 객관적으로 측정하고자 한다. 최근, 차량 전자 기술의 발달에 따라 핸들에 작용하는 토크, 차량의 속도 등의 현재 차량의 상태를 나타내는 신호와 도로의 곡률 등의 외부 요인들을 계측하는 신호들을 계측할 수 있게 되었다. 이러한 센서 데이터를 사용하여 이질감을 객관적으로 관찰할 수 있는 파생 변수를 도출하고, 탐색적 데이터 분석을 통해 운전자와 전문가가 느끼는 주관적 성능을 객관화, 정량화하고자 한다.
차선 유지 보조 시스템은 전방의 카메라로 차선을 검출하고 차량 중심과 차선 간의 상대적인 위치를 지속적으로 파악하여, 운전자가 의도하지 않은 차선 이탈이 예상되는 경우에 전동식 파워 스티어링 장치(MDPS, Motor Driven Power Steering) 등의 조향각 자동 제어를 통해 주행 차선을 유지하고 횡 방향 추돌 사고의 위험을 경감시켜주는 시스템이다(Risack et al., 2000; Rajamani, 2012; Marino et al., 2012). 의도하지 않은 차선 이탈 시 운전자에게 경고를 주는 차선 이탈 경보 시스템과는 횡 방향에 대한 보조 기능이라는 점에서 동일하지만, 직접 핸들 조작에 개입한다는 차이점이 있다.
LKAS의 성능을 평가하는 연구들도 활발하게 진행되고 있으며, 차량의 관점에서 본래 의도했던 기능, 즉 차선에 대한 인식 성능(Mineta et al., 2003)과 차선을 이탈하지 않는지를 평가하는 연구(Hwang et al., 2008)가 대부분을 이루고 있다. 여러 국제 기관에서도 성능의 평가 기준을 확립하고 있으며, ISO 11270 (2013)에서는 약 72~80km/h의 속도로 직선 구간에서는 횡이탈 속도를 0.4±0.2m/s의 범위 내에서 평가하며, 곡선 구간에서는 횡가속도가 1.0m/s2를 넘지 않는 적절한 곡률 반경을 선택하여 평가한다. 예를 들어, 약 72km/h의 속도에서 최대 횡가속도 값을 갖는 곡률 반경(R) 조건은 400m가 된다. 이러한 조건에서 타이어의 바깥쪽이 차선 경계선을 특정 오프셋 값(승용차 0.4m, 버스 및 화물차 1.1m) 이상 벗어나지 않으면 성공이라고 판정한다. EURO NCAP (2017)은 직선 구간에서 72km/h의 속도로 달리는 동안 횡이탈 속도를 0.2m/s부터 0.1씩 증가시켜, 0.5m/s에서도 차선을 이탈하지 않으면 성공으로 판정한다. NHTSA (2013)은 직선 구간에서 72km/h의 속도로 달리는 동안 횡이탈 속도를 0.2m/s부터 0.1씩 증가시켜, 0.5m/s에서도 차선을 이탈하지 않으면 성공으로 판정한다. 또한, NHTSA는 0.6m/s의 횡이탈 속도로부터 실패할 때까지 0.5m/s씩 증가시키고, 성공하는 최대 횡이탈 속도를 성능 지표값으로 판정하는 방법도 존재한다. EURO NCAP과 NHTSA 평가 기준에서는 모두 곡선 구간에서 평가 기준이 언급되어 있지 않은데, 곡선로의 주행에서는 운전자의 졸음이나 부주의의 확률이 매우 낮기 때문에 제외된 것으로 추정하기도 한다(Woo et al., 2016). 국내의 경우, KNCAP (Korean New Car Assessment Program, n.d.)의 사고 예방 안정성 항목 안에 차로 유지 지원 장치의 평가 기준으로 제공되고 있다. 직선도로에서는 65±3km/h로 주행 중 횡속도 0.2~0.5m/s의 범위 내에서 좌, 우측 차로 이탈을 실시하고, 곡선도로에서는 65±3km/h로 주행하다가 곡률 반경(R) 800m의 구간으로 조향 핸들을 놓고 진입을 실시한다. 이때, 전륜은 이탈되는 방향의 최외측 차선의 모서리를 벗어나지 않는 것이 성공 조건이다.
인간의 관점에서 차선 유지 보조 시스템의 효과성을 입증하기 위한 연구들도 다수 수행되었다. Tanaka et al. (2000)은 운전자의 생체 반응을 측정하여 차선 유지 보조 시스템이 운전자의 작업 부하 감소에 효과가 있음을 밝혔다. 또한 Blaschke et al. (2009)은 실제 주행 중 전화를 거는 등의 주의 분산 상황에서 차선 유지 보조 기능의 효과가 있다고 주장하였다. Park (2017)은 첨단 운전자 보조 시스템과 관련된 문헌의 분석을 통해 자동화 수준이 높아질수록 작업 부하는 낮아지지만, 도로 환경에 대한 상황인식 수준 역시 낮아져 운전자의 반응 시간이 증가하는 것이 다수 문헌의 일치된 결론이라 소개하고 있다.
차량을 구매하는 고객의 기대는 점차 높아져서 기술에 대한 기능적 완성도와 효과성을 뛰어넘어 총체적인 경험의 향상을 원하는 방향으로 진화하고 있다. 보조 시스템이 아무리 안전에 도움을 주는 기능이라 할 지라도 좋지 않은 운전자 경험을 제공한다면, 기능을 끄고 주행하는 결과를 낳을 수 있으며 결국 보조 기능 자체가 무용지물이 될 수도 있다. 따라서 운전자 경험을 고려하여 보조 시스템을 설계하는 것은 중요하지만 차선 유지 보조 시스템으로 인한 운전자의 경험과 관련한 연구는 거의 찾아보기가 어려운 실정이다. Eichelberger and McCartt (2016)은 전화 인터뷰를 통해 대표적인 첨단 운전자 보조 시스템인 적응형 순항 제어 시스템, 전방 차량 경고 시스템, 차선 이탈 경고 시스템, 차선 유지 보조 시스템에 대한 실제 운전자의 경험을 수집하였으며, 조사한 시스템 중 운전자를 가장 귀찮게 하거나 짜증나게 하는 것은 차선 유지 보조 기능임을 지적하였다. 그러나 해당 연구는 운전자의 응답에 대한 구체적인 분석이 부족하며, 운전자의 기억에 의존하였다는 한계점이 있다.
3.1 Method
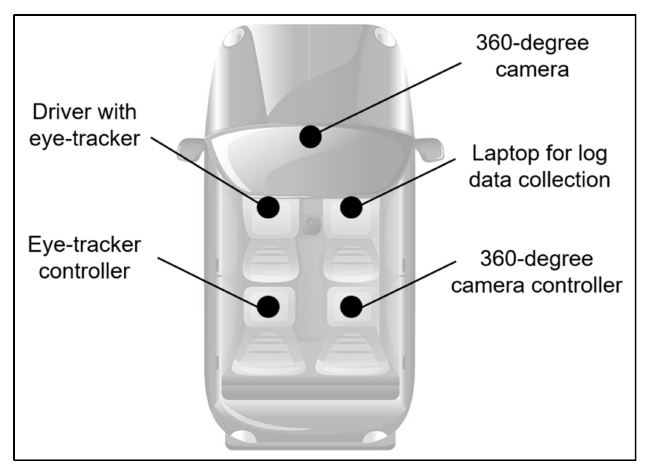
주행 시 발생하는 이질감을 관측하기 위해 첨단 운전자 보조 시스템 관련 성능 평가 전문가 2명, 인간공학 분야 전문가 2명이 실차 주행 테스트에 참가하였다. 시험용 차량에서 조수석에 앉은 기술자가 차선 유지 보조 시스템의 다양한 설정값을 차량에 적용하였고, 성능 평가 전문가는 차량을 직접 제어하면서 주행하는 동안 느껴지는 이질감을 체험하였다. 1차 테스트에서 중앙고속도로의 영주휴게소부터 가산IC까지 왕복 약 185km의 구간을 2시간에 걸쳐 주행하였고, 2차 테스트에서는 다른 성능 평가 전문가가 영주휴게소부터 신림IC까지 왕복 약 176km의 구간을 2시간에 걸쳐 주행하였다. 주행 테스트는 운전자의 핸들 파지1 여부에 따라 두 가지 조건에서 수행되었다. 먼저, 핸들을 잡은 파지 조건에서는 차선 유지 보조 시스템에서 발생시킨 토크와 운전자가 발생시킨 토크가 복합적으로 작용하는 상황에서의 이질감을 관찰하였고, 핸들을 잡지 않은 미파지 조건에서는 차선 유지 보조 시스템만이 작용하는 횡 방향 자율주행 상황에서 차량 거동 상 느껴지는 이질감을 주로 관찰하였다. 사고의 위험을 최소화하기 위해 전문 교육을 이수한 평가 전문가만 주행에 참여하였고, 평가 차량 앞뒤로 2대의 차량을 기술자가 주행하도록 하여 예외 상황이 발생할 여지를 최소화 시켰다. 미파지 조건의 평가 시, 다른 일반 차량이 주위에 없을 때에는 평가 차량이 차선을 벗어나는 즉시 전문가가 운전에 개입하였으며, 시야 내에 일반 차량이 있을 때에는 차선을 벗어나지 않더라도 차선의 이탈을 유발하는 횡 방향 변화가 감지되면 운전에 즉시 개입하는 등 더욱 방어적으로 주행에 임하였다. 시험용 차량의 내부, 외부 상황을 녹화하기 위해 360도가 녹화되는 카메라를 사용하였고, 운전자의 시각을 파악하기 위해 안경형 시선 추적 장비를 사용하였다(Figure 1). 차량의 주행 성능에 대한 평가는 성능 평가 전문가 2명만이 관여하였고, 인간공학 전문가 2명은 성능 평가에 영향을 미치지 않았으며 주행 상황의 기록 및 성능 평가 전문가의 행동 관찰자로서의 역할만 수행하였다.
3.2 Results
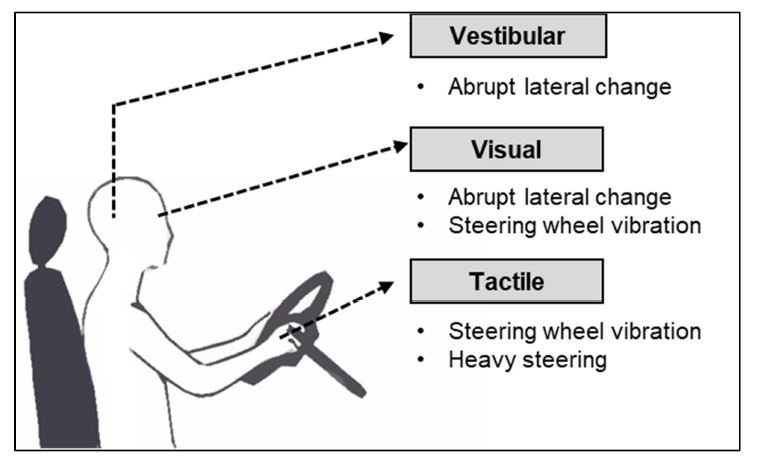
실 주행 테스트를 마친 후, 녹화한 영상 및 전문가 워크숍을 통해 이질감의 종류를 추출하여 나열하고, 감각 기관 별로 연결하는 작업을 수행하였다. 또한 차량 성능 평가 전문가와 함께 이질감이 발생하는 원인을 분석하였다. 시험용 차량을 통해 급격한 횡 방향 변화, 핸들 떨림, 핸들 조향 방해와 같이 3가지 이질감이 평형 기관, 시각, 촉각을 통해 인지되었다(Figure 2). 급격한 횡 방향의 변화로 인해 좌우 쏠림 현상이 나타나며 이는 평형 기관을 통해 인지되는 한편, 선수각이 변하면서 전방 시야가 바뀌므로 시각을 통해서도 인지가 가능하다. 핸들 떨림은 핸들을 잡고 있지 않은 상황에서는 시각을 통해 인지가 가능하며, 핸들을 잡고 있을 때엔 촉각을 통해 인지된다. 핸들 조향 방해는 운전자가 핸들에 힘을 가했을 때 평소와 다르게 무겁게 느껴지며, 촉각을 통해 인지된다.
3.2.1 Abrupt lateral change
차선 유지 보조 시스템이 발생시킨 토크가 너무 강할 때, 핸들에 과도한 힘이 작용하여 차량의 선수각2(heading angle)이 급격히 변하는 현상이 관찰되었다. 선수각의 갑작스러운 변동은 횡 방향의 속도 변화를 동반하게 되어 좌우 쏠림 현상이 나타나며, 운전자는 평형 감각을 통해서 이를 감지할 수 있었다. 한번 급격하게 바뀐 선수각은 오히려 반대편 차선으로 근접하게 만들기 때문에 또다시 역방향으로의 새로운 토크를 유발하게 된다. 이것이 반복되어 차선의 중심을 따라가지 못하고 좌우로 크게 거동하는 것을 지그재그 현상이라 하며, 이 현상 역시 평형 감각을 통해 운전자가 감지할 수 있었다.
3.2.2 Steering wheel vibration
운전자와 차선 유지 보조 시스템의 토크가 복합적으로 핸들에 작용하고 있는 상황에서 운전자는 핸들을 잡고 있는 손을 통해 어느 정도 보조 시스템이 발생시킨 토크를 느낄 수 있게 된다. 이 때 보조 시스템의 토크 수정이 잦아져서 토크의 변화량이 높아지면, 사용자는 손을 통해 마치 핸들이 떨리는 듯한 느낌을 받게 되는 것을 발견하였다. 발생한 핸들 떨림 현상은 노면에서 오는 떨림과 명확히 구분할 수 있었으며, 정상적인 보조 시스템의 토크와 유사한 세기의 수준이었고, 두 평가 전문가 모두 초당 1회 이상의 떨림이 발생한다고 보고하였다. 핸들을 쥐고 있을 때에는 촉각을 통해서 핸들 떨림을 감지할 수 있었으며, 핸들을 잡고 있지 않았을 때에는 시각을 통해 핸들이 미세하게 떨리는 것을 감지할 수 있었다.
3.2.3 Heavy steering
핸들 조작 시, 운전자가 의도하는 방향과 반대 방향의 차선 유지 보조 시스템 토크가 발생하게 되면 평소보다 핸들이 무겁게 느껴지는 것을 발견하였다. 운전자들은 이러한 토크가 조향 조작을 방해한다고 판단할 수 있다. 운전자와 보조 시스템의 토크 방향이 서로 다를 때는 보조 시스템의 토크를 감쇄하여 운전자에게 미치는 간섭을 최소화하는 방향으로 설계하고자 한다. 그러나 감쇄량이 적절하지 않은 경우, 운전자는 이질감을 느끼는 것으로 나타났다.
4.1 Method
4.1.1 Data collection and pre-processing
앞서 3장에서 언급된 실험을 통해 이질감을 세 가지 유형으로 정리하였다면, 본 장에서는 양산 차량에 적용될 수 없을 수준으로 각 이질감들을 재현한 열세 설정(bad setting)과 이질감이 나타나지 않아 전문가 2인 모두가 양산 차량에 적용되어도 무방하다고 판정한 우수 설정(good setting) 간의 주행 로그 데이터를 서로 정량적으로 비교하고자 한다. 이를 위해 중앙고속도로 영주휴게소 하행 방향으로 시험용 차량을 통해 새롭게 데이터 수집 작업이 수행되었으며, 우수 설정, 급격한 횡 방향 변화의 재현 설정, 핸들 떨림의 재현 설정, 핸들 조향 방해의 재현 설정 등 총 4가지 설정에 대해 각각 약 10분 분량의 로그 데이터를 수집하였다. 우수 설정값을 찾아나가기 위한 시행착오를 겪는 과정 중에 이질감이 느껴질 때의 설계 요소 별 설정값을 기록하였다가 열세 설정 재현을 위해 사용하였다. 다양한 설계 요소가 복합적으로 작용하여 우수 설정과 열세 설정 간의 명확한 차이를 논하긴 어려우나, 급격한 횡 방향 변화가 느껴지는 열세 설정과 핸들 떨림이 느껴지는 열세 설정은 우수 설정 대비 곡률에 대한 토크 gain 값이 상대적으로 높았다. 또한, 핸들 조향 방해가 느껴지는 열세 설정은 우수 설정 대비 토크감쇄량3의 설정값이 상대적으로 낮았다. 급격한 횡 방향 변화와 핸들 떨림의 이질감은 운전자로부터 발생하는 토크와 별개로, 오직 차선 유지 보조 시스템으로 인해 발생하는 패턴을 살펴보기 위해 운전자가 핸들을 잡지 않은 상태에서 수집하였다. 핸들 조향 방해 이질감은 운전자가 손으로 방해 토크를 느끼기 위해 핸들을 잡은 상태에서 수집하였다. 3장에서 언급한 주행 테스트와 마찬가지로 사고의 위험을 최소화하기 위해 전문 교육을 이수한 평가 전문가가 시험용 차량을 제어하였고, 평가 차량 앞뒤로 2대의 차량을 기술자가 주행하도록 하여 예외 상황이 발생할 여지를 최소화 시켰다. 수집된 시계열 데이터는 각 센서마다 계측 주기가 다르기 때문에 가장 높은 계측 주기인 100Hz 기준으로 전처리 작업을 수행하였고, 이질감과 연관이 없는 상황에 대한 필터링 작업을 수행하였다. 예를 들어, 차선 인식의 품질 등의 문제로 차선 유지 보조 시스템의 동작을 보장할 수 없는 경우, 차선 유지 보조 시스템이 동작하지 않는 60km/h 이하에서의 주행, 도로 상황 때문에 운전자가 의도적으로 차선을 변경한 경우는 모두 분석에서 제외하였다.
4.1.2 Derived variables
차량 전자 기술의 발달에 따라 차량에는 횡 변화율 및 핸들에 작용하는 토크 등 차량의 상태를 계측하는 센서들이 설치되어 있으며, 각 센서를 통해 다양한 신호들이 동시다발적으로 발생한다. 이 신호들은 호스트 컴퓨터(host computer) 없이 모듈 간의 통신을 가능하게 하는 CAN (Controller Area Network)을 통해 송수신된다. CAN 통신은 서로 다른 부품 시스템 간의 통신 속도 차이를 해결하였으며, 모듈 간의 물리적인 분리로 보안을 유지할 수 있는 장점이 있어 현재 상용차 뿐만 아니라 항공기, 의료기, 철도, 승강기 등에 널리 쓰이고 있다(Farsi et al., 1999). 시험 차량의 CAN 통신을 통해 계측되는 변수는 100개가 넘으며, 여기에는 헤드램프, 와이퍼 조작 등 차선 유지 보조 시스템과 무관한 변수들이 다수 포함되어 있다. 따라서 각 변수의 의미를 고려하여 차선 유지 보조 시스템과 연관이 있는 변수를 먼저 선별하였고, 그 기준은 아래와 같다.
속도와 관련된 변수
운전자의 핸들 조작과 관련된 변수
보조 시스템의 핸들 조작과 관련된 변수
차선의 인식과 관련된 변수
그 후 선별된 변수들을 조합 및 변환하여 이질감을 정량적으로 계측할 수 있는 파생 변수를 도출하였다.
4.2 Results
본 장에서는 도출된 파생 변수 중 각 세 가지의 이질감을 잘 설명할 수 있는 대표적인 변수를 소개한다. 또한, 이질감이 발생하는 설정값과 그렇지 않은 설정값에서의 파생 변수에서 차이가 발견되는지 알아보기 위해 제곱평균제곱근(Root Mean Square; RMS), 표준편차 값을 구하여 비교하였고(Table 1), 시각화하기 위해 상자 그림(box plot), 스펙트로그램(spectrogram) 등을 활용하였다. 또한 두 설정값에서의 통계적 차이를 보기 위해 비모수적 검정 방법인 이표본 K-S 검정(Two Sample Kolmogorov-Smirnov Test)을 수행하였다.
|
|
Good setting |
Bad setting (with
intrusive feelings) |
||
|
RMS |
SD |
RMS |
SD |
|
|
Lateral speed (m/s) |
3.907 |
3.836 |
4.073 |
3.974 |
|
Filtered steering angle (°) |
0.103 |
0.092 |
0.324 |
0.231 |
|
Interference torque (Nm) |
0.269 |
0.269 |
0.684 |
0.684 |
4.2.1 Abrupt lateral change
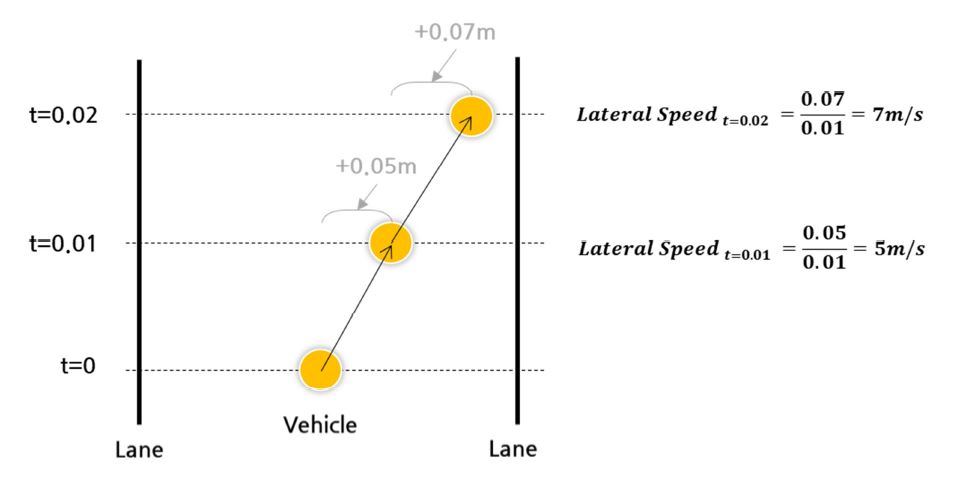
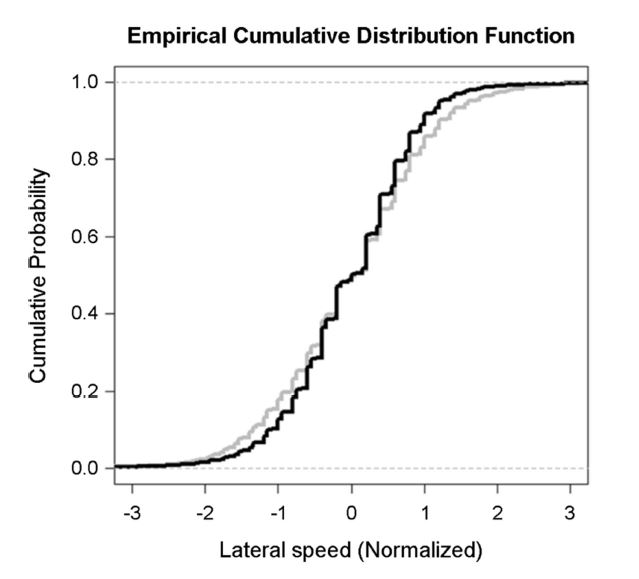
좌우 쏠림은 인간의 평형 감각에 의해 인지되며, 횡 방향의 급격한 거동 변화에 의해 발생한다. 횡 방향의 변화를 살펴보기 위해 차량의 차선 내 횡 방향 위치(Lateral position, LP)를 통해 횡 방향 속도(Lateral speed, LS)를 도출하여 분석에 활용하였다. 횡 방향 위치를 계측하는 센서는 30ms 마다 좌우측 차선과 차량의 거리를 밀리미터(mm) 단위로 계측하여 차선 내에 차량의 위치를 파악한다. t초에 횡 방향 위치를 LPt라고 할 때, t초의 횡 방향 속도는 단위 시간 ΔT 동안 변화한 횡 방향 위치로 정의되며 이를 수식으로 표현하면 다음과 같다.
예를 들어 차량의 주행이 Figure 3과 같을 때, 단위 시간을 0.01초라고 가정하면 0.01초의 횡 방향 속도는 5m/s가 된다.
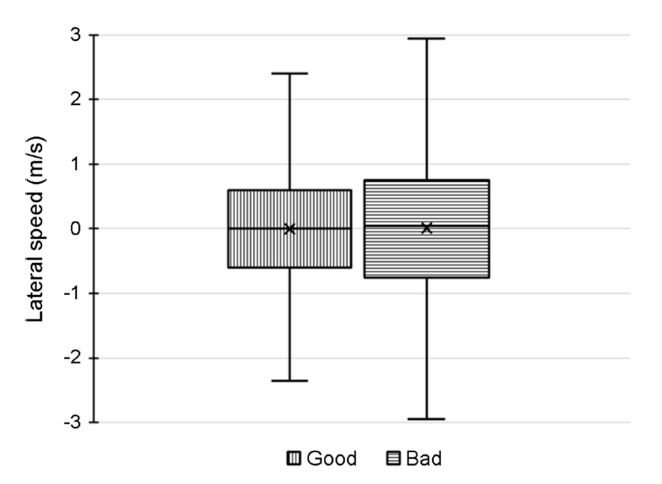
횡 방향 속도는 음수값을 가질 수 있기 때문에 크기 비교를 위해 RMS 값을 사용하였다. 그 결과, 급격한 횡 방향 변화가 발생하는 주행에서 근소하게 높은 RMS 값을 보였다(4.073m/s > 3.907m/s; Table 1). 또한 상자 그림을 살펴본 결과, 이질감이 크게 나타난 주행에서 조금 더 넓은 산포를 보이는 것을 알 수 있었다(Figure 4). K-S 검정 결과, 우수 설정과 열세 설정 간의 횡 방향 속도의 분포에 통계적으로 유의미한 차이가 나타났다(D = 0.06, p < .001, Figure 5).
4.2.2 Steering wheel vibration
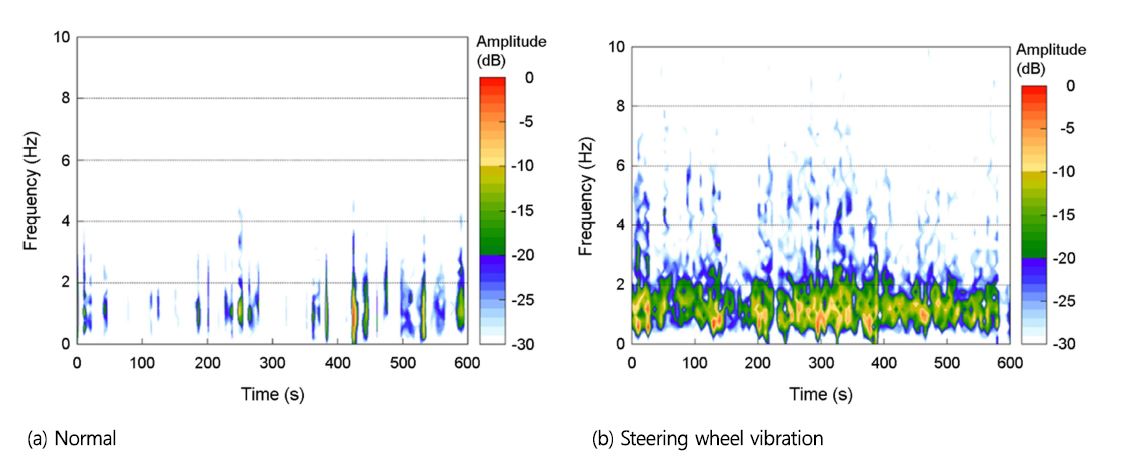
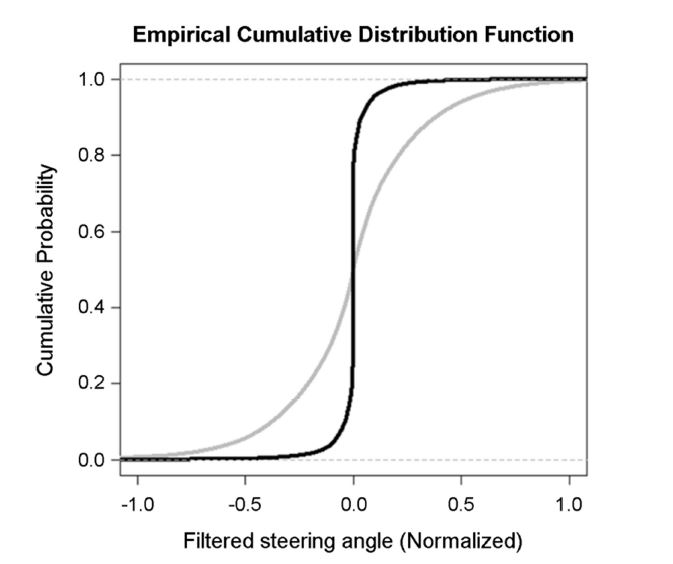
핸들이 떨리는 현상을 객관적으로 계측하기 위해서는 조향각(steering angle) 신호의 관찰이 필수적이다. 조향각을 계측하는 센서는 10ms 마다 현재 핸들이 중앙 정렬 상태 대비 얼마나 회전하였는지를 0.1도(deg) 단위로 계측한다. 본 연구에서는 핸들 떨림을 효과적으로 발견하기 위해 해당 계측 신호에 고역통과필터(High-pass filter)를 적용한 변수(필터 적용 조향각, Filtered Steering Angle)를 분석에 활용하였다. 고역통과필터 적용 시, 경험적 판단에 근거하여 운전자가 떨림으로 인지하는 1Hz 이상의 떨림 신호만 통과시켰다.
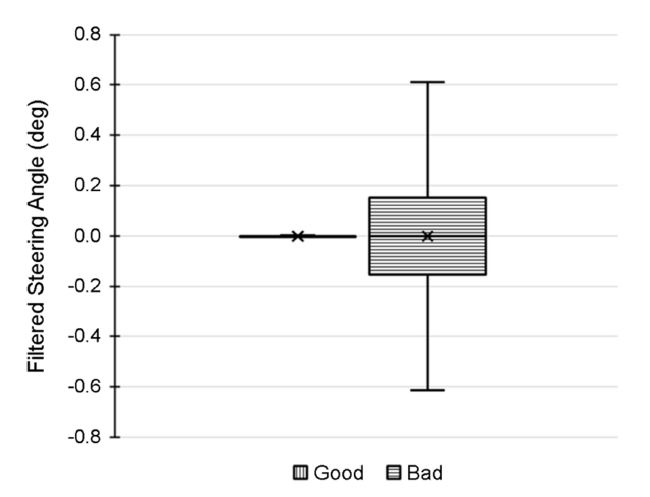
필터 적용 조향각에 대한 분석 결과, 핸들 떨림 현상이 심한 차량에서 계측한 RMS 값이 떨림 현상이 덜 나타난 설정보다 더 높게 나타났으며(0.324° > 0.103°; Table 1), 상자 그림 역시 떨림이 심한 데이터에서 더 큰 폭을 보이는 것을 알 수 있었다(Figure 6). Figure 7은 떨림 현상을 효과적으로 관찰하기 위한 시각화 방법인 스펙트로그램을 활용하여 필터 적용 조향각 신호를 나타낸 것이다. 핸들 떨림이 발생했던 주행에서는 1Hz 이상의 떨림이 전 구간에 걸쳐 강하게 나타나는 것을 볼 수 있었다. K-S 검정 결과, 우수 설정과 열세 설정 간의 필터 적용 조향각의 분포에 통계적으로 유의미한 차이가 나타났다(D = 0.32, p < .001, Figure 8).
4.2.3 Heavy steering
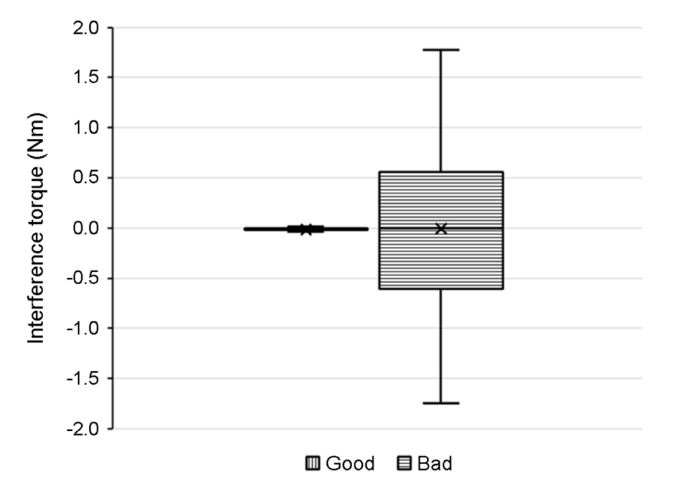
핸들 조향 방해 이질감은 운전자의 토크 방향과 반대 방향으로 보조 시스템의 토크가 작용할 때 강하게 인지되었다. 따라서 차선 유지 보조 시스템의 토크를 계측한 신호(LKAS Torque) 중 운전자의 토크 방향과 다른 신호만 남긴 방해 토크 변수(Interference Torque, IT)를 분석에 활용하였다. 보조 시스템의 토크를 계측하는 센서는 10ms 마다 보조 시스템이 발생시킨 토크량을 Nm 단위로 소수점 여섯째자리까지 계측한다. 보조 시스템에서 발생시킨 토크를 l이라 하고, 운전자가 발생시킨 토크를 d라고 할 때, 방해 토크 IT는 아래와 같이 정의된다(시계 방향으로 작용한 토크는 음의 부호를 갖는다).
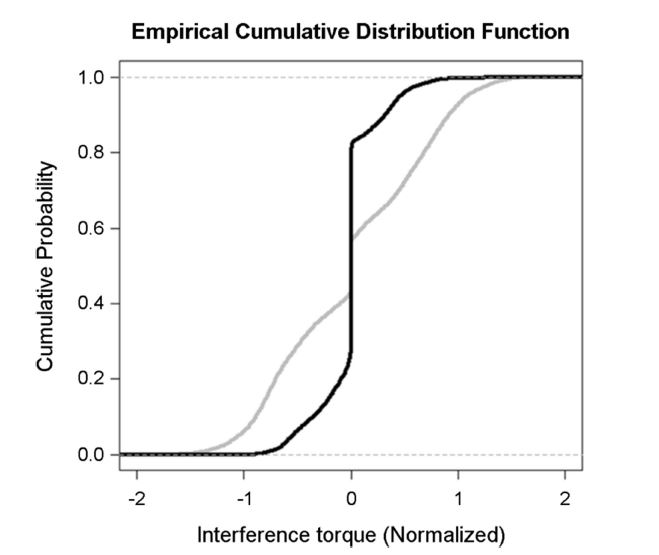
방해 토크의 RMS 값은 이질감이 크게 나타난 주행에서 더 높게 나타났고(0.684Nm > 0.269Nm), 표준편차 역시 더 높았다(0.684 > 0.269). 상자 그림 분석 결과, 핸들 조향을 방해하는 이질감으로 인해 핸들이 무겁게 느껴진 곳에서 방해 토크가 더 큰 폭으로 관찰되었다(Figure 9). K-S 검정 결과, 우수 설정과 열세 설정 간의 방해 토크의 분포에 통계적으로 유의미한 차이가 발견되었다(D = 0.25, p < .001, Figure 10).
본 연구에서는 차량 평가 전문가와 인간공학 전문가가 참여하여 이질감을 확인하고 이를 정량적으로 계측할 수 있는 방법을 제안하였다. 본 연구를 통해, 차선 유지 보조 시스템이 유발할 수 있는 이질감을 발견, 분류하고 이를 객관적으로 계측할 수 있다는 가능성을 확인하였고, 가상 실험이 아닌 실차 주행 환경에서 실제 현업의 전문가가 직접 재현한 이질감을 기준으로 연구된 결과이며, 현재 현업에서 주로 활용되는 주관적 판단 기준을 대체할 수 있는 객관적 정량화를 시도한 면 등에서 학술적, 산업적 의의가 크다고 할 수 있다.
그러나, 일반 대중에게 공개가 힘든 시험용 차량으로 실험을 진행하였기 때문에 이질감에 대한 다양한 일반 운전자의 반응을 관찰하지 못하였다는 점은 본 연구의 한계로 들 수 있다. 또한, 차량 성능 테스트를 현업 부서에서 소수의 정예 인력이 담당하고 있어, 담당자의 개인적 성향이 통계적으로 유의한 차이가 있는지 등에 대해 확인이 가능할 만큼의 평가자 샘플을 수집할 수 없었다는 점이 아쉬운 부분으로 남았다. 또한, 고속도로에서 80~100km/h의 속도를 유지하면서 다른 차량의 영향을 최소화한 제한된 환경에서 실험을 진행하였기 때문에 제시된 속도를 벗어나는 범위나 도로나 차량의 외부 환경 요인이 더 많은 일반 국도에서 새로운 유형의 이질감이 발견될 가능성은 충분히 존재한다. 각 이질감을 정량적으로 계측할 수 있는 파생 변수 역시 새로운 센서 기술의 적용으로 인해 더욱 더 정교화 되거나 새롭게 추가될 수 있을 것으로 판단된다.
본 연구에서 제시한 이질감의 유형을 기반으로 설계 요소, 계측 데이터, 운전자의 만족도를 아우르는 추가 연구들을 진행할 수 있을 것으로 기대된다. 급격한 횡 방향 변화로 인한 이질감은 차선 유지 보조 시스템이 발생시킨 토크로 인해 발생하는데, 설계 요소 중 높은 토크 gain이 조향각의 변화에 개입하여 이질감을 발생시키는 것을 의심할 수 있다. 이질감을 최소화하기 위해 토크 gain을 너무 낮추게 되면 곡선 구간이나 운전자 부주의 상황 시 복원력이 떨어져서 차선 이탈을 막지 못할 수 있어 치명적일 수 있다. 따라서 운전자의 만족도와 시스템의 신뢰성을 종합적으로 고려하여 토크 gain 값을 결정해야할 것이다. 이와 같은 다양한 설계 요소는 추후 자율주행 환경에 접어들었을 때 운전자가 느끼는 차량의 성능 및 만족도에 많은 영향을 미칠 것으로 판단되지만, 설계 요소만으로 운전자의 만족도나 신뢰성을 설명하기에는 어려운 점들이 있다. 설계 요소는 무게, 차체 길이 등 차량의 고유한 물리값에 따라 달라지기 때문에 일반화하기 어렵고, 수십 개의 설계 요소가 서로 상호작용하며 복합적으로 작용하기 때문에 이질감의 관측을 논리적으로 해석하기 어렵다. 결국 설계 요소만으로 객관적인 성능 계측이 힘들기 때문에, 운전자의 주관적 느낌을 통해 이질감 발생 여부를 파악해야만 하는 한계가 존재했다. 본 연구에서는 도로 상의 주행을 기록한 계측 데이터와 파생 변수를 통해 이질감을 객관적으로 계측해낼 수 있는 가능성을 보여주었다. 앞으로 계측 데이터를 토대로 운전자가 실제로 인지하는 이질감의 정도, 차량의 성능, 주관적 만족도 간에 어떤 관계가 있는지 종합적으로 규명하는 연구를 진행하고자 한다. 추후 이질감을 설명할 수 있는 정량적 모델을 만든다면 감성을 기반으로 한 새로운 정량적 성능 지표를 제안할 수 있을 것이며, 만족도를 해치지 않는 지점에서의 차량 거동의 최적 조건을 체계적으로 찾아나갈 수 있을 것이다.
운전자의 편의성과 안전을 증대시키기 위해 다양한 첨단 운전자 보조 시스템이 차량에 장착되고 있다. 그 중 차선 유지 보조 시스템은 운전자의 제어에 직접 개입하면서 다양한 이질감을 유발할 수 있으며 운전 경험에 영향을 미친다. 따라서 본 연구에서는 이질감에 초점을 맞추어 이를 객관적으로 측정하는 방법을 탐색하고자 하였다. 실제 차선 유지 보조 시스템이 동작하는 시험용 차량을 통해 세 가지 유형(급격한 횡 방향 변화, 핸들 떨림, 핸들 조향 방해)의 이질감을 확인하였으며, 차량에 부착된 센서를 통해 계측되는 신호를 활용하여 각 이질감을 설명하는 세 가지 파생 변수(Lateral speed, Filtered steering angle, Interference torque)를 도출하였다. 또한 이질감이 많이 발생한 주행과 그렇지 않은 정상적인 주행 사이에서 파생 변수가 다른 경향을 나타내는 것을 확인하여 이질감의 객관적 측정에 대한 가능성을 살펴보았다. 본 연구의 결과는 차선 유지 보조 시스템 설계의 기초 자료로 활용될 수 있으며, 보조 시스템이 장착된 차량의 성능을 객관적으로 평가할 수 있는 토대가 될 것이다. 추후 자율주행 등 기술의 발전에 따라 자동차 산업에서 운전자의 운전 경험을 저해시키는 다양한 유형의 이질감이 나타날 것으로 예상된다. 학계와 산업계에서 이러한 이질감에 대한 체계적인 연구를 수행함으로써 더 나은 운전자 경험을 제공할 수 있을 것이다.
References
1. Blaschke, C., Breyer, F., Färber, B., Freyer, J. and Limbacher, R., Driver distraction based lane-keeping assistance. Transportation Research Part F: Traffic Psychology and Behaviour (Elsevier), 12(4), 288-299, 2009.
Crossref
Google Scholar
2. Cho, S.S., Choi, K.H., Lim, J. and Kang, B.D., A Trend of Advanced Proving Ground and the Proposal of the Test Bed for ADAS Vehicle. In Proceedings of Conference of the Korean Society of Automotive Engineers, 2049-2055, 2013.
Crossref
3. Cho, Y., Park, J., Park, S. and Jung, E.S., Technology Acceptance Modeling based on User Experience for Autonomous Vehicles. Journal of the Ergonomics Society of Korea, 36(2), 87-108, 2017.
Crossref
Google Scholar
4. Eichelberger, A.H. and McCartt, A.T., Toyota drivers' experiences with dynamic radar cruise control, pre-collision system, and lane-keeping assist. Journal of Safety Research (Elsevier), 56, 67-73, 2016.
Crossref
Google Scholar
5. EURO NCAP, TEST PROTOCOL - Lane Support Systems, 2017.
Crossref
6. Farsi, M., Ratcliff, K. and Barbosa, M., An overview of controller area network. Computing & Control Engineering Journal, 10(3), 113-120, 1999.
Crossref
Google Scholar
7. Heo, P.S., A study on the Automotive ADAS Market Diffusion Factors. In Proceedings of Symposium of the Korean Institute of communications and Information Sciences, Korea Institute off Communication Sciences, 942-945, 2009.
Crossref
8. Hwang, J., Huh, K., Na, H., Jung, H., Kang, H. and Yoon, P., Development of a model based predictive controller for lane keeping assistance. SAE Technical Paper No. 2008-01-1454, 2008.
Crossref
Google Scholar
9. ISO 11270, Intelligent Transport Systems - Lane Keeping Assistance Systems - Performance Requirements and Test Procedures, 2013.
Crossref
10. KNCAP, http://www.kncap.org/
Crossref
11. Lee, S., Kwon, W. and Lee, J.W., A vision based lane departure warning system. Intelligent Robots and Systems, 1999. IROS'99. Proceedings. 1999 IEEE/RSJ International Conference on. Vol. 1. IEEE, 1999.
Crossref
Google Scholar
12. Lu, J., Messih, D., Salib, A. and Harmison, D., An enhancement to an electronic stability control system to include a rollover control function. No. 2007-01-0809. SAE Technical Paper, 2007.
Crossref
Google Scholar
13. Marino, R., Scalzi, S. and Netto, M., Integrated driver and active steering control for vision-based lane keeping. European Journal of Control, 18(5), 473-484, 2012.
Crossref
Google Scholar
14. Mineta, K., Unoura, K. and Ikeda, T., Development of a lane mark recognition system for a lane keeping assist system. SAE Technical Paper No. 2003-01-0281, 2003.
Crossref
Google Scholar
15. Moon, S., Moon, I. and Yi, K., Design, tuning, and evaluation of a full-range adaptive cruise control system with collision avoidance. Control Engineering Practice, 17(4), 442-455, 2009.
Crossref
Google Scholar
16. Mulder, M., Abbink, D.A. and Carlson, T., Introduction to the special issue on shared control: applications. Journal of Human-Robot Interaction, 4(3), 1-3, 2015.
Crossref
Google Scholar
17. National Highway Traffic Safety Administration. Lane departure warning system confirmation test and lane keeping support performance documentation. US Department of Transportation, 2013.
Crossref
18. Olney, R.D., Wragg, R., Schumacher, R.W. and Landau, F.H., Collision Warning System Technology, Intelligent Transport Systems World Congress, Japan, November 1995.
Crossref
19. Park, J., A Review on the Transitions of Control Authority in Advanced Driver Assistance Systems (ADAS), Journal of the Ergonomics Society of Korea, 36(6), 665-675, 2017.
Crossref
20. Rajamani, R., Lateral vehicle dynamics. In Vehicle Dynamics and Control, 15-46. Springer US, 2012.
Crossref
Google Scholar
21. Risack, R., Mohler, N. and Enkelmann, W., A video-based lane keeping assistant. In Proceedings of IEEE Intelligent Vehicles Symposium, 356-361. Dearborn. MI: IEEE, 2000.
Crossref
Google Scholar
22. SAE (Society of Automotive Engineers) International. On-Road Automated Driving (Orad) Committee J3016_201609 - Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2016.
Crossref
23. Schmidt, C., Kalze, F.J. and Eichhorn, K., Adaptive front-lighting system in LED technology-initial steps and the future. No. 2007-01-0873. SAE Technical Paper, 2007.
Crossref
Google Scholar
24. Schram, R., Williams, A. and van Ratingen, M., Implementation of Autonomous Emergency Braking (AEB), the next step in Euro NCAP'S safety assessment. In Proceedings of International Technical Conference on The Enhanced Safety of Vehicles, Seoul 2013.
Crossref
Google Scholar
25. Strand, N., Nilsson, J., Karlsson, I.M. and Nilsson, L., Semi-automated versus highly automated driving in critical situations caused by automation failures. Transportation Research Part F: Traffic Psychology and Behaviour, 27(B), 218-228, 2014.
Crossref
Google Scholar
26. Tanaka, J., Ishida, S., Kawagoe, H. and Kondo, S., Workload of using a driver assistance system. In Proceedings of Intelligent Transportation Systems, 382-386. IEEE, 2000.
Crossref
Google Scholar
27. Woo, H., Yong, B., Kim, K. and Lim, J., Road Test Scenario and Performance Assessments of Lane Keeping Assistance System for Passenger Vehicles. Transaction of the Korean Society of Automotive Engineers, 24(2), 255-263, 2016.
Crossref
Google Scholar
PIDS App ServiceClick here!