eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Kyeong-Hee Choi
, Jeong-Bae Ko
, Hoon Sang Lee
, Ho Sang Lee
, Hee Kyoung Lee
, Yong-Ku Kong
, Hyun-Ho Shim
, Hyunji Keum
, Byeong Hee Won
10.5143/JESK.2025.44.2.155 Epub 2025 May 05
Abstract
Objective: The purposes of this study are (1) to develop an evaluation method for quantifying the care burden of excretion care and (2) to apply this method to demonstrate the effectiveness of excretion care robot in reducing the care burden.
Background: The global trend of aging is emerging as a significant social issue, with a shortage of caregivers and an increasing care burden. As the demand for caregiving service increases, the work intensity of caregivers are also rising, which is strongly associated with the increasing prevalence of work-related musculoskeletal disorders (WMSDs) in caregivers. In response, care robots have gained worldwide attention as a potential solution. However, evidence demonstrating that care robots effectively reduce the caregivers' burden is still insufficient, and there is a lack of systematic evaluation frameworks to quantify the care burden. Therefore, the main objective of this study is to develop an evaluation framework for assessing care tasks, with a focus on excretion care, which is known to have high work intensity and frequency.
Method: To develop the evaluation method, key indices for measuring physical and mental burden of excretion care were selected based on expert opinions in the fields of ergonomics and occupational therapy. Then, the relative weights of each index were derived using analytic hierarchy process (AHP). A care burden score (CBS) was calculated by linearly combining the relative weights and scores of each index providing comprehensive information on both physical and mental load. To apply this evaluation method, experimental data were collected from 10 caregivers. Manual care (MC) using paper diaper and robot-aided care (RC) were performed on the manikin that mimics human anatomy and physiology, allowing participants to conduct a realistic experiment. MC and RC tasks were divided into separate sub-tasks and then classified into three phases (Preparation phase, Front phase, and Post phase) based on their sequence and characteristics. During these tasks, muscle activity of 8 muscles (Upper trapezius, Biceps brachii, Triceps brachii, Erector spinae, Rectus femoris, Biceps femoris, Tibialis anterior), motion analysis, and questionnaire data were collected. Using this experimental data, the CBS for both MC and RC were derived, and statistical analysis was conducted to examine the significant differences in CBS based on robot use.
Results: Results indicated that the use of the excretion robot significantly increased physical burden during the preparation phase, whereas during the front phase, the use of the robot significantly reduced physical burden. In terms of mental burden, a decrease was observed only in the front phase when using the robot. Results of the care burden score (% CBS), which combines both mental and physical burdens, indicated that the use of the robot led to a reduction in overall burden in the front phase.
Conclusion: This study developed a systematic evaluation method for excretion care burden and discussed the applicability using experimental data from robot-assisted and traditional manual care. The reduction effect of the robot on care burden was lower than anticipated; however, a reduction of approximately 4.6% in CBS was observed in the Front phase compared to manual care.
Application: This study presents a standardized evaluation method for excretion care burden, which is expected to be expanded to various caregiving tasks such as feeding, bathing, and transferring, and could be used to identify high-risk tasks in nursing field. By directly comparing the CBS between robot-aided care and manual care, the effect of the care robot in reducing care burden was demonstrated, which is expected to have a positive impact on the widespread adoption of care robots.
Keywords
Care burden score (CBS) Excretion care Robot-aided care Diaper changing care Caregiver
2023년 기준 65세 이상 고령인구는 총 950만명으로 우리나라 전체 인구의 약 18.4%를 차지하고 있으며, 2025년에는 20.6%로 초고령사회로의 진입이 예상되고 있다(Ministry of Health and Welfare, 2023). 급격한 고령화에 따라 돌봄 서비스의 수요가 증가하고 있으나, 돌봄 서비스를 제공하는 돌봄 제공자의 수는 매우 부족한 실정이다. 요양보호사 인력 수급 격차를 살펴보면 2018년에는 17,693명의 요양보호사가 과잉 공급되었지만, 2020년에는 11,694명의 요양보호사가 부족하고 2030년에는 그 격차가 더 벌어져 89,976명의 요양보호사가 부족할 것으로 전망된다(Lim and Lee, 2021). 이러한 요양인력의 부족은 돌봄 제공자의 업무부하 가중 뿐만 아니라 요양환경에서의 돌봄 서비스의 질 하락을 초래한다. 요양보호사의 역할이 점점 중요해지는 이 시점에서 이들의 안전과 작업환경 개선에 대한 요구와 필요성이 증가하고 있다.
돌봄 서비스의 최전선에서 종사하고 있는 요양보호사는 독립적인 생활이 어려운 노인들을 위해 노인요양 및 재가 시설에서 돌봄 서비스를 제공하는 근로자를 말한다. 22년도 요양보호사 자격증 취득자는 총 252만명으로 그 중 약 228만명인 90.2%가 여성인 것으로 나타났으며, 요양시설과 방문요양센터(재가) 등에서 실제 일하는 요양보호사 약 65만명 중 50대 이상이 약 93.8%, 60대 이상은 65.6%를 차지하는 것으로 나타났다(Ministry of Health and Welfare, 2023). 요양보호사가 수행하는 대부분의 돌봄 업무는 육체적인 부담을 동반할 뿐만 아니라 여성 고령자의 비율이 다른 산업군에 비해 상대적으로 높기 때문에 근골격계질환 위험 부담이 매우 높은 것으로 알려져 있다.
요양보호사가 일상적으로 수행하는 많은 돌봄과업들은 대부분 부적절한 자세와 큰 힘 발휘 등의 높은 업무 강도를 지니며, 이러한 작업 특성은 근골격계질환과 관련된 통증, 피로감, 불편함을 야기하는 주 원인이다(Oliveira et al., 2023). 요양보호사가 수행하는 돌봄과업들 중에서도 기저귀를 교체하고 배설물을 세정하는 배설돌봄과업은 가장 힘든 업무 중 하나로 꼽힌다(Miyaji et al., 2022). 우리나라 요양시설에 거주하는 노인의 약 52.0-62.1%는 기저귀를 착용하기 때문에(Cho and Park, 2009; Song et al., 2003), 요양보호사 1인이 담당하는 기저귀 케어 빈도는 매우 높다. 뿐만 아니라 배설돌봄과업은 대상자의 체위를 변경하여 기저귀를 교체하고 둔부를 세척하는 과업을 포함하기 때문에 요양보호사의 신체적인 힘 발휘를 필요로 하며, 이는 장기적 관점에서 상지, 척추, 하지 등에 큰 부하를 가중시킨다고 알려진 바 있다(Cardoso et al., 2020). 기저귀 착용은 돌봄 제공자뿐만 아니라 돌봄 대상자에게도 다양한 문제를 야기할 수 있다. 장기간 기저귀 착용은 요로계 및 피부 감염 등의 부작용을 유발할 수 있으며(Omli et al., 2010), 타인에게 배설물 처리를 의존하는 과정에서 돌봄 대상자는 수치심, 자존감 저하 등 다양한 정서적 문제를 경험할 수 있다(Lim and Kim, 2019). 이에 대한 해결책으로서 배설돌봄로봇을 활용하여 기저귀 케어를 대체할 수 있는 방법에 대한 관심과 필요성이 지속적으로 증대되고 있으며, 정부차원의 지원과 투자 역시도 확대되는 추세이다.
돌봄로봇이란 노인, 장애인 등의 일상생활을 보조하는 로봇을 의미하며, 식사, 배설, 이승 및 커뮤니케이션 등 다양한 돌봄로봇들에 대한 연구 개발이 활발히 이루어지고 있다. 본 연구에서 대상으로 하는 배설돌봄로봇이란, 대소변 케어를 부분 또는 전면적으로 대체할 수 있는 로봇을 의미한다. 로봇은 기능에 따라 대소변 감지부터 처리까지의 전 과정을 수행하는 로봇과 대소변을 감지하여 사용자에게 알림을 주는 기능에 특화된 로봇으로 분류할 수 있다. 전자의 대표적인 예로는 CareBidet (Curaco, Korea)와 Liberty Himawari (Liberty Solution, Japan)가 있으며, 이들 로봇은 컵 형태의 착용부를 사용자의 둔부에 밀착하여 착용하고, 센서를 통해 대소변을 자동으로 감지한 후 흡입 및 세정 기능을 수행한다. 국내에서 이러한 배설돌봄로봇이 일부 요양시설에 시범적으로 도입되어 활용되고 있으며, 실증 연구를 통해 현장 적용 가능성과 개선 방향이 모색되고 있다. 로봇의 사용성과 기능은 고도화되고 있으며 현장 적용 가능성 역시 확인되었지만, 여전히 노인장기요양보험 급여품목에 포함되지 않아 소비자가 높은 비용을 부담해야 한다는 점에서 경제적 제약이 보급 확산의 주요 걸림돌로 작용하고 있다.
후자의 예로는 DFree (DFree, Japan)가 있으며, 해당 센서는 방광의 팽창 상태를 모니터링 하여 배뇨시기를 예측하고, 알림을 제공하여 사용자로 하여금 실금을 예방하고 자립적 생활을 지원하는 로봇이다. 리텍라이프 배변감지 시스템(LEETEC LIFE, Korea)은 기저귀에 부착하여 대상자가 기저귀에 대소변을 보았을 때 알람을 제공하여 신속한 기저귀 교체를 지원한다. 후자에 해당되는 로봇은 비교적 낮은 가격으로 공급이 가능하기 때문에, 현장으로의 도입이 상대적으로 활발히 이루어지고 있다.
본 연구에서는 대소변 케어의 전 과정을 수행하는 로봇을 대상으로 한다. 이러한 배설돌봄로봇은 대소변을 즉각적으로 처리하여 위생적이며, 돌봄 제공자에게 전적으로 배설 케어를 의존하지 않아도 된다는 점에서 돌봄 대상자의 존엄성을 지킬 수 있다는 장점이 있다. 또한, 돌봄 제공자 입장에서도 기존의 기저귀 케어 대비 신체적, 정신적 부담을 경감시킬 수 있어, 근무환경 개선에도 긍정적인 효과가 기대된다. 이러한 배설돌봄로봇의 긍정적 효과가 정량적으로 입증될 수 있다면, 정부차원의 투자 확대 및 장기요양보험 품목지정 등의 논의에도 긍정적인 영향을 미칠 수 있으며, 소비자 입장에서도 구매의 타당성을 뒷받침하는 근거자료로 활용될 수 있다. 이러한 필요성에 따라 본 연구는 돌봄로봇 사용에 따른 돌봄부담 경감 효과를 객관적으로 평가하고 수치화 할 수 있는 체계를 개발하는 것을 주된 목적으로 한다.
기존 돌봄관련 연구(Kyota et al., 2013; Brinkmann et al., 2021)는 주로 근전도 또는 주관적 경험 등 단일 지표 중심으로 수행되는 경우가 많아, 돌봄과업의 복합적인 특성을 충분히 반영하지 못한다는 한계점을 지닌다. 특히 돌봄은 제공자와 대상자 간의 상호작용 속에서 수행되기 때문에 신체적 부담 뿐만 아니라 정신적, 사회정서적 스트레스 역시 함께 고려되어야 한다. 그러나 지금까지의 연구는 이러한 돌봄부담을 다차원적으로 평가할 수 있는 체계를 제시하지 못했다. 이러한 한계점을 극복하고자 본 연구는 신체적, 정신적, 사회정서적 스트레스를 통합하여 돌봄과업의 총체적인 부하를 하나의 수치로 표현할 수 있는 종합부하평가 체계를 개발하였다는 점에서 기존 연구와 차별성을 지닌다. 작업자의 신체적 부하를 세 종류의 지표(근전도, 신체 굴곡각도, 주관적 부하)를 이용해서 측정하였으며, 배설물 처리 과정에서 경험하는 감각적 스트레스, 자존감 저하와 같은 사회정서적 스트레스 역시 평가항목으로 추가하여, 기존 연구보다 포괄적이고 심층적인 평가 체계를 구축하였다.
이러한 평가 체계는 향후 다양한 돌봄과업에 대하여 표준화된 평가 기준으로 활용될 수 있을 것이다. 돌봄로봇의 부담 경감 효과를 과학적으로 입증하여 소비자의 합리적 구매 판단과 정부 및 산업계의 정책 수립을 위한 근거자료로 활용될 수 있을 것이라 기대되며, 더 나아가 돌봄 종사자의 근무환경 개선과 안전한 작업환경 조성에도 기여할 수 있으리라 사료된다. 마지막으로 로봇 개발자에게는 사용 중 발생하는 Pain point를 진단하고 개선안을 도출할 수 있는 유용한 피드백 수단으로 기능함으로써 사용자 중심의 로봇 기술 고도화에 기여할 것으로 기대된다.
본 연구의 첫 번째 목적은 배설돌봄과업으로 인한 돌봄 제공자의 작업부담을 종합적으로 정량화할 수 있는 평가 체계를 개발하는 것이다. 이를 위하여 배설돌봄과업의 신체적, 정신적 부담 평가를 위한 주요 지표를 선정하고, 선정된 지표들을 통합할 수 있는 평가 체계를 개발하였다. 두 번째 목적은 요양보호사를 대상으로 실험을 통해 실측 데이터를 수집하고, 개발된 체계에 적용시켜 돌봄로봇 사용에 따른 부담 경감 효과를 객관적으로 파악하는 것을 목적으로 한다.
2.1 Development of evaluation method for care burden
2.1.1 Selection of evaluation index
작업부하를 평가할 수 있는 지표는 매우 다양하지만 모든 평가 방법을 활용하는 것은 현실적으로 어렵기 때문에 가장 적합한 지표를 선택하는 과정이 필요하다. 이를 위해 문헌 연구를 통해 다양한 평가 지표를 수집하였고, 전문가들의 평가를 거쳐 최적의 지표를 선정하는 과정을 수행하였다.
먼저 신체적 부하와 정신적 부하를 상위지표로 선정하였으며, 각각의 상위지표를 구성하는 하위지표를 나열하였다. 문헌조사를 통해 인간공학 또는 간호 분야에서 작업자의 정신적, 신체적 부하 평가에 빈번하게 사용되는 지표들 선정하였다(Table 1). 신체적 부하를 측정할 수 있는 지표로는 산소 소비량, 심박수, 근육부하, 작업자세, 관절부하, Borg's CR-10 Scale로 총 6개의 지표가 선정되었다. 정신적 부하의 경우 자기기입식 조사를 통해 측정할 수 있는 설문항목을 5개 선정하였다.
|
Criteria (1st
layer) |
Sub-Criteria (2nd
layer) |
Description |
References |
|
Physical load |
Oxygen consumption |
Amount of oxygen (L/min) the body
uses |
Wald and Harrison, 1975 |
|
Heart rate |
Number of heartbeat per minute
(bpm) during |
Wald and Harrison, 1975 Huang et al., 2013 |
|
|
Muscle activity |
Electrical signals generated by
muscle |
Brinkmann et al., 2021 |
|
|
Working
posture |
Body
alignment during movement |
Engels et al., 1994 |
|
|
Joint load |
Mechanical force or stress placed
on a joint with |
Feyent et al., 2000 Waters et al., 1994 |
|
|
Perceived exertion |
Subjective method to assess
perceived exertion |
Borg, 2004a,b |
|
|
Mental load |
Task difficulty |
How difficult or complex was the task |
Robinson, 2001 Luger et al., 2023 Hart and Lowell, 1988 |
|
Self-esteem decline |
How much did you feel self-esteem
decline |
Edwards et al., 2010 Mroz et al., 2018 Sasat et al., 2002 |
|
|
Experience of disgust |
How disgust or unpleasant did you
feel when |
Hilton et al., 2017 Hadjittofi et al., 2020 Ousey et al., 2016 Özkan et al., 2021 |
|
|
Temporal demand (Time pressure) |
How much time pressure did you feel |
Hart and Lowell, 1988 |
|
|
Frustration level |
How discouraged, irritated,
stressed did you feel |
Hart and Lowell, 1988 |
도출된 11개 지표들 중 가장 적절한 지표를 선택하기 위하여 11명의 인간공학 및 작업치료 전문가(인간공학 교수 10인, 작업치료 전문가 1인)를 대상으로 자문 평가를 수행하였다. 배설돌봄과업의 작업 절차 및 특성을 충분히 이해할 수 있는 설명 및 시청각 자료를 제공한 뒤, 해당 과업의 작업부담을 평가하기에 가장 적합한 하위 요소를 세 개씩 선정하라고 요청하였다. 가장 많은 전문가로부터 선정된 상위 3개 항목을 본 연구의 주요 지표로 선정하였다(Table 2). 신체부하 평가 지표의 경우, 근전도(Muscle activity, 81.8%)와 작업자세(Working posture, 72.7%), 자각된 부하(Perceived exertion, 63.6%)가 가장 높은 빈도로 선정되었으며, 상대적으로 측정이 어려운 산소 소비량의 경우 가장 낮은 빈도(9.1%)로 선정되었다. 정신적 부하 평가 지표 중에서는 배설물 접촉으로 인한 불쾌감 또는 비위 상함(Experience of disgust from urine/feces, 90.9%), 난이도(Task difficulty, 81.8%), 자존감 감소 정도(Self-esteem decline, 54.5%)가 높은 선택 비율을 보였다.
|
Criteria |
Sub-Criteria |
Number of experts selected |
Selection percentage |
|
Physical load |
Muscle activity |
9 |
81.8% |
|
Working posture |
8 |
72.7% |
|
|
Perceived exertion |
7 |
63.6% |
|
|
Joint load |
5 |
45.5% |
|
|
Heart rate |
3 |
27.3% |
|
|
Oxygen consumption |
1 |
9.1% |
|
|
Mental load |
Experience of disgust from
urine/feces |
10 |
90.9% |
|
Task difficulty |
9 |
81.8% |
|
|
Self-esteem decline |
6 |
54.5% |
|
|
Frustration level |
5 |
45.5% |
|
|
Temporal demand/pressure |
3 |
27.3% |
2.1.2 Method for deriving relative weights
최종적으로 선정된 정신적, 신체적 부하 지표 6개에 대하여 계층화 분석법(Analytics Hierarchy Process, AHP)을 이용하여 상대적 중요도를 도출하였다. 계층화 분석법은 의사결정 기법 중 하나로, 다양한 전문가들의 의견을 종합하는 기법이다(Saaty, 2004). 지표별 상대 가중치 도출을 위하여 총 37명의 관련 분야 전문가(인간공학 및 작업의학분야 전문가 17명, 요양보호사 및 시설관리자 20명)를 대상으로 쌍대비교를 수행하였다. 먼저 상위평가 항목에 대한 쌍대비교를 수행한 뒤, 각각의 상위항목을 구성하고 있는 하위항목에 대하여 쌍대비교를 수행하였다. 응답의 일관성을 위해 일관성 비율(Consistency Ratio; CR)이 0.2 미만인 32명(인간공학 및 작업의학분야 전문가 16명, 요양보호사 16명)의 답변에 대해서만 분석을 수행하였으며, 분석 결과는 표 3과 같다(Table 3). 일반적으로 CR 값이 0.1 이하일 때 일관성이 높다고 판단하지만, Saaty (1983)는 AHP에 대한 이해도가 비교적 낮은 사람들을 대상으로 조사하는 경우에는 0.2까지 허용할 수 있다고 언급하였다. 본 연구에 참여한 요양보호사 및 시설관리자 20명은 AHP에 대한 이해도가 상대적으로 낮기 때문에 CR 값을 0.2 미만까지로 설정하여 조사를 수행하였다.
먼저 AHP 모델의 1st, 2nd Local weight가 도출되었으며, 1st와 2nd layer의 가중치를 곱하여 종합 가중치(Global weight)를 도출하였다. 상위항목의 경우, 전문가들은 정신적 부하(.348)보다 신체적 부하(.662)에 더 큰 가중치를 부여하였다. 신체적 부하의 하위평가 항목으로는 근육부하(.415), 자세부하(.391), 주관적 부하(.195) 순서로 큰 가중치를 나타냈으며, 정신적 부하의 경우 과업의 난이도(.502), 배설물 접촉 스트레스(.314), 자존감 스트레스(.184) 순서의 중요도를 나타냈다. 종합 상대적 중요도는 근육부하(.275)와 자세부하(.259)가 각각 1위와 2위를 차지하였다.
|
Criteria |
Weight |
Sub-Criteria |
Local weight |
Global weight |
Rank |
|
Physical |
0.662 |
Muscle load |
0.415 |
0.275 |
1 |
|
Postural load |
0.391 |
0.259 |
2 |
||
|
Subjective load (CR-10) |
0.195 |
0.129 |
4 |
||
|
Mental |
0.348 |
Emotional stress caused by
contact with feces |
0.314 |
0.109 |
5 |
|
Emotional stress caused by
difficulty of the task |
0.502 |
0.175 |
3 |
||
|
Emotional stress related to a decline in self-esteem |
0.184 |
0.063 |
6 |
2.1.3 Combination of 6 indices (Composite index)
선정된 6개 지표에 대하여 동일한 단위로 전환하는 표준화 과정을 수행하였다. 6개 지표의 범위(0-100점)와 방향성(수치가 높을수록 부하가 높은 상태)을 일치시키도록 조정하였다. 근활성도는 Maximum voluntary contraction (% MVC)를 이용하여 정규화하였으며, 자세부하의 경우 피험자의 최대 굴곡각도를 기준으로 정규화하였다. 주관적 신체부하와 정신적 부하는 모두 100점 스케일을 활용하여 정규화 하였다(0-스트레스 없음; 100-스트레스 최대치).
6개 지표를 모두 반영하여 하나의 부담점수를 도출하기 위하여 지표별 상대 가중치와 정규화된 측정값들을 선형 결합하는 방법을 활용하였다. 전문가 평가를 통해 도출된 평가항목별 가중치 값이 클수록 돌봄부담 평가에 있어 중요한 항목이라고 해석될 수 있다. 따라서 중요하게 평가되는 지표가 종합점수 도출 시 큰 비중을 차지할 수 있도록 선형 결합 방법을 활용하였으며(Equation 1), 본 연구에서는 해당 점수를 돌봄부하 점수(Care burden score, CBS)라고 정의하였다. CBS 점수는 0-100점 사이의 값을 가지며, 점수가 클수록 정신적, 신체적 부하가 큼을 의미한다.
(= 지표 i의 Global 가중치,
= 지표 i의 정규화 점수)
2.2 Data collection
2.2.1 Participants
본 연구를 위하여 요양보호사 자격증을 취득하였으며, 실제 요양환경에서 근무중인 여성 요양보호사 16명이 모집되었다. 요양보호사들의 인구통계학적 특성은 다음과 같다(Table 4). 돌봄 데이터 수집을 위하여 실제 요양환경과 유사하게 구현된 모의 실증환경에서 실험을 수행하였다. 실험을 위해 한국생산기술연구원 생명윤리위원에 심의승인을 받아 진행되었다(IRB#: A-2024-017). 실험에 앞서 연구 목적 및 방법 등의 설명을 제공하였으며, 피험자의 서면 동의를 받은 후 연구가 진행되었다.
|
|
Age (years) |
Height (cm) |
Weight (kg) |
|
Mean ± SD |
57.4±8.7 |
158.0±5.4 |
60.4±8.5 |
2.2.2 Hierarchical task analysis (HTA) of excretion care tasks
체계적인 데이터 수집 및 분석을 위하여 배설돌봄과업을 관찰하고 특성에 따라 분류하는 작업이 선행되었다. 본 연구에서는 종이 기저귀를 교체하고 물티슈를 이용하여 대소변을 세척하는 일련의 과정을 전통적 배설돌봄과업(Manual care, MC), 로봇을 이용하여 돌봄과업을 수행하는 것을 로봇활용 배설돌봄과업(Robot-aided care, RC) 라고 정의하였다. 요양시설에 방문하여 배설돌봄과업을 직접 관찰하였으며, 그 밖에도 요양보호사 업무지침, 로봇 사용 매뉴얼 및 영상 등을 참고하여 MC와 RC의 작업을 단위작업으로 세분화하였다(Table 5). 각 단위작업은 과업의 특성, 순서에 따라 세 종류의 과업단계(준비, 본 작업, 마무리)로 분류되었다. 준비단계(Preparation phase)란 본격적인 배설 케어를 위한 사전 준비단계를 의미한다. 인력작업(MC)에서는 물품이 담긴 카트를 침대 옆으로 이동시킨 후, 일회용 장갑을 착용한다. 더미에 덮여 있는 이불을 걷고 가림막으로 가리는 작업을 수행한다. 로봇 착용의 경우, 로봇을 침대 옆으로 이동시키는 작업, 콘센트를 꼽고 전원을 켜는 작업, 세정수통에 물을 붓는 작업이 추가된다. 로봇 탈거의 경우 인력작업과 동일하다.
|
Task |
Manual care (MC) |
Robot-aided care (RC) |
|
|
Donning robot(로봇 착용) |
Doffing robot(로봇 탈거) |
||
|
Preparation |
1. Bring the cart(카트 가져오기) |
1. Bring the cart(카트 가져오기) |
1. Bring the cart(카트 가져오기) |
|
|
2. Bring the robot(로봇 가져오기) |
|
|
|
3. Turn power switch on(전원 켜기) |
|||
|
|
4. Prepare the water tank |
|
|
|
2. Sanitize hands and wear |
5. Sanitize hands and wear |
2. Sanitize hands and wear |
|
|
3. Set up the curtain and bedding |
6. Set up the curtain and bedding |
3. Set up the curtain and bedding |
|
|
Front |
|
7.
Prepare the diaper cup |
|
|
4. Remove pants(하의 탈의) |
8. Remove pants(하의 탈의) |
4. Remove pants(하의 탈의) |
|
|
5.
Remove the diaper |
9.
Attach the diaper cup to |
5.
Remove diaper cup |
|
|
|
10.
Put on the diaper cup |
|
|
|
6.
Clean up feces/urine |
11.
Select the operation mode |
||
|
7.
Put on new diaper |
|
6.
Put on new diaper |
|
|
8. Put on pants(하의 착의) |
12. Put on pants(하의 착의) |
7. Put on pants(하의 착의) |
|
|
|
|
8. Tidy up diaper cup(착용부 정리) |
|
|
Post |
9. Tidy up the curtain and bedding |
13. Tidy up the curtain and bedding |
9. Tidy up the curtain and bedding |
|
|
|
10.
Turn power switch off(전원 끄기) |
|
|
11. Clean the water and sewage tank |
|||
|
12. Store the robot(로봇 보관) |
|||
|
10. Store the cart(카트 보관) |
14. Store the cart(카트 보관) |
13. Store the cart(카트 보관) |
|
본 작업단계(Front phase)는 본격적인 배설 케어가 수행되는 핵심작업으로 정의된다. 인력작업의 경우, 더미의 바지와 기저귀를 벗긴 뒤, 둔부에 묻어 있는 찱흙(대변)을 물티슈로 닦아내는 작업을 수행한다. 다음으로 더미에게 새 기저귀와 하의를 입힌다. 로봇 착용의 경우, 하의를 벗기고 착용부를 국부에 밀착시킨 뒤, 벨크로를 이용하여 착용부와 신체를 고정시킨다. 그 후, 디스플레이의 '작동' 버튼을 누르고, 하의를 입히는 작업을 수행한다. 로봇 탈거의 경우, 하의를 벗기고 벨크로를 풀어 착용부를 분리하고, 기저귀와 하의를 착용하는 과업으로 구성된다.
마무리단계(Post phase)는 배설돌봄과업을 마치고 정리정돈을 하는 단계를 의미한다. 인력작업과 로봇 착용의 경우, 가림막을 걷고 더미에 이불을 덮어주는 과업, 카트를 제자리로 이동시키는 과업이 동일하게 수행된다. 로봇 탈거에서는 로봇의 전원을 끄고, 오물통과 세정수통을 세척하고, 로봇을 제자리로 이동시키는 과업이 추가된다.
2.2.3 Experimental design
본 연구의 독립변수로는 배설돌봄과업의 과업유형(Manual care, MC; Robot-aided care, RC), 과업단계(Preparation, Front, Post phase)가 선정되었다. 연구에서는 RC를 구현하기 위하여 착용형 배설돌봄로봇인 Carebidet (Curaco Inc., Korea)가 사용되었다. 누워있는 사용자의 몸에 로봇의 착용부를 밀착하여 착용시키고, 배설물이 감지되면 연결된 호스를 통해 배설물이 자동으로 흡인되어 오물통으로 이동하게 된다. 이 후, 착용부의 세정 노즐을 통해 세정수를 분사하여 둔부와 음부에 남아있는 잔여 배설물을 세정하고, 온풍을 분사하여 남아있는 물기를 건조시키는 기능을 수행하게 된다(Figure 1, left). 돌봄 대상자 역할을 위하여 여성 고령자 모형인 Advanced full-functional elderly nursing manikin (General doctor, Shanghai, China)가 사용되었다(Figure 1, right).

종속변수로는 단위작업별 정신적, 신체적 부담 지표 6개가 선정되었다(Table 6). 근활성도는 주력 방향 8개 근육(상부승모근, 중간삼각근, 상완이두근, 상완삼두근, 척추기립근, 대퇴직근, 대퇴이두근, 전경골근)에 대하여 무선 표면 근전도 장비인 Trigno wireless EMG system (Delsys, Boston, MA, USA)를 활용하여 측정되었다. 자세부하는 동작분석 장비인 MyoMOTION (Noraxon, Scottdale, AZ, USA)를 활용하여 측정되었으며, 목, 허리, 팔꿈치, 무릎의 굴곡각도를 측정하였다.
굴곡각도를 정규화하기 위하여 특정작업 수행 중의 신체 굴곡각도를 개인별 최대 굴곡각도를 기준으로 정규화하여 비교하는 방법을 활용하였다(Equation 2). 예를 들어 목의 최대 굴곡각도가 30°이고 특정작업 A를 수행하는 동안 평균적으로 15°의 굴곡이 발생했다면 작업 A의 정규화된 굴곡각도는 50%로 표현될 수 있다. 이러한 방식으로 계산된 값은 0-100% 사이의 범위를 가지며, 특정작업이 개인의 최대 굴곡각도 대비 어느 정도의 굴곡자세를 요구하는지 정량적으로 파악할 수 있다는 장점을 지닌다. 따라서 높은 값을 가지는 경우, 굴곡이 크게 발생했음을 의미한다.
주관적 신체부하는 Borgs' CR-10 Scale 척도를 이용하여 평가하였다. 정신적 부하는 설문을 기반으로 100점 척도로 평가하였다(Table 6). 단위과업 종료 후, 해당 과업으로 인한 정신적 스트레스를 세 개의 설문문항(Q1: 해당 과업의 난이도는 어떠합니까?, Q2: 해당 과업을 수행하면서 자존감은 얼마나 감소합니까?, Q3: 해당 과업을 수행하면서 배설물 접촉으로 인한 불쾌함은 어느 정도 입니까?)을 통해 측정하였다. 점수가 커질수록 정신적 스트레스가 큼을 의미한다.
|
1st Criteria |
2nd Criteria |
Method |
Scale |
|
Physical load |
Muscle activity |
8 muscles activity was measured using |
0-100% MVC |
|
Working posture |
Relative flexion angle (%) of 4 body segments |
0-100% |
|
|
Perceived exertion |
Subjective discomfort was measured using Borgs'
CR-10 scale |
0 (Nothing at all) - 10 (Extremely hard) |
|
|
Mental load |
Task difficulty |
Q1. How
difficult or complex was the task |
0 (Not difficult at all) - 100 (Extremely difficult) |
|
Self-esteem decline |
Q2. How
much did you feel self-esteem |
0 (No decline) - 100 (Extreme decline) |
|
|
Experience of disgust |
Q3. How
disgust or unpleasant did you feel |
0 (Not unpleasant at all) - 100 (Extremely unpleasant) |
2.2.4 Experimental procedure
실험 수행 전, 배설돌봄로봇에 익숙해지기 위하여 로봇 사용법에 대한 교육과 충분한 연습시간을 제공하였다. 근활성도 데이터 수집을 위하여 무선 근전도 장비를 착용하였으며, 정규화를 위하여 근육별 Maximum voluntary contraction (MVC)를 각각 3회씩 5초간 측정하였다. 작업자세 분석을 위하여 동작분석 장비를 착용하였으며, 실험 전 허리, 무릎, 팔꿈치, 목의 신체부위에 대하여 피험자의 최대 굴곡각도를 측정하였다. 모든 데이터는 단위작업별로 수집되었으며, 단위작업별로 1회씩 임의의 순서로 실험이 진행되었다. 단위작업 수행 후, 피험자가 느꼈던 주관적 신체부하, 정신적 스트레스(작업 난이도, 배설물 접촉 스트레스, 자존감 감소)에 대하여 설문을 통해 측정하였다. 돌봄 대상자 역할을 위해 여성 고령자 모형의 둔부 및 회음부에 대변과 유사한 질감의 지점토를 도포하여 실제 대변 케어 작업을 모사할 수 있도록 하였다(Figure 2). 피로 방지를 위하여 RC와 MC 간에 약 15분의 휴식시간을 제공하였다.

2.2.5 Statistical analysis
단위작업별로 수집된 여섯 종류의 데이터는 모두 0-100% 사이의 값으로 정규화하는 과정을 거친 뒤, 본 연구에서 개발된 점수화 체계를 적용하여 단위작업별 CBS 점수를 도출하였다. 로봇 사용 여부와 작업단계에 따른 CBS 점수의 유의한 차이를 살펴보기 위하여 이원배치 분산분석기법이 사용되었다(SPSS v.18, SPSS Inc., Chicago, IL, USA). 유의미한 주효과 및 교호작용에 대하여 Tukey HSD (Honest significant difference) test를 이용하여 그룹간 차이를 통계적으로 분석하였다(유의수준 α<0.05).
3.1 Physical load
과업유형(Task type - Manual, Robot-aided care)에 따른 Physical load는 통계적으로 유의하지 않았으나(p>0.05), 과업단계(Task phase - Front, Preparation, Post phase)의 주효과와 과업유형과 과업단계에 대한 교호작용은 통계적으로 유의한 것으로 나타났다(all p<0.05, Table 7). 과업단계의 주효과를 살펴보면, Preparation (13.0±1.3%)의 신체적 부하가 가장 낮았으며, Front (16.8±1.5%)와 Post (15.4±1.8%) phase의 부하가 가장 큰 것으로 나타났다. 과업단계와 유형간 교호작용을 살펴보면, Front, Post phase에서는 과업유형에 따른 신체적 부하의 유의한 차이가 발견되지 않았으나, Preparation 단계에서는 Robot-aided care의 신체부하가 Manual care 대비 유의하게 높은 것으로 나타났다(Figure 3).
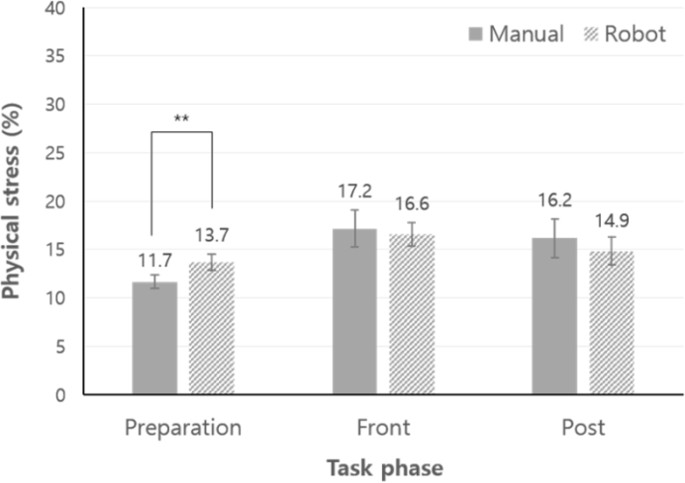
|
Factor |
DF |
MS |
F |
p-value |
|
Task type |
1 |
.013 |
.007 |
.935 |
|
Task phase |
2 |
111.987 |
59.340 |
.000 |
|
Task type × Task phase |
2 |
19.186 |
10.166 |
.000 |
3.2 Mental load
Mental stress에 대한 과업유형과 과업단계의 주효과와 교호작용은 모두 통계적으로 유의한 것으로 나타났다(all p<0.05, Table 8). 과업유형의 주효과를 살펴보면, 로봇을 사용하는 경우 1.7±1.4%로 Manual (3.1±4.2%) 대비 유의하게 낮은 것으로 나타났다. 과업단계의 경우, Preparation (0.2±0.3%), Post phase (1.4±1.1%) 보다 Front phase (5.0±3.7%)의 정신적 부하점수가 유의하게 높은 것으로 나타났다. 교호작용의 경우, Preparation, Post phase에서는 과업유형에 따라 정신적 부하점수의 차이가 유의하지 않았으나, Front phase에서는 로봇을 사용하는 경우의 정신적 부하는 3.5±1.9%로 Manual (7.5±4.7%) 대비 유의하게 낮은 것으로 나타났다(Figure 4).
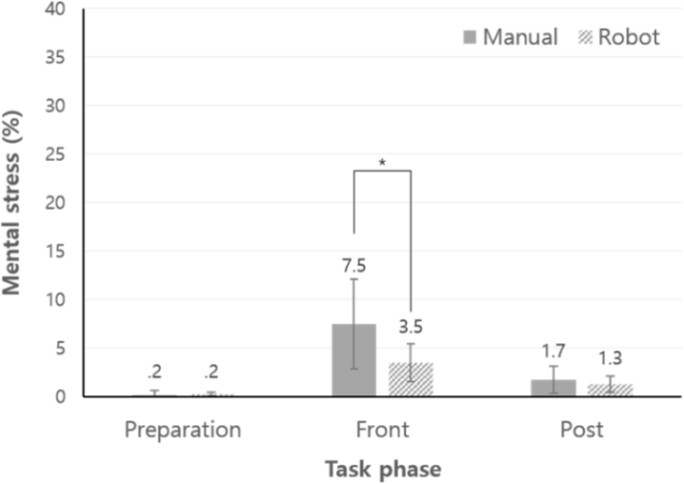
|
Factor |
DF |
MS |
F |
p-value |
|
Task type |
1 |
39.578 |
10.206 |
.002* |
|
Task phase |
2 |
185.220 |
47.761 |
.000* |
|
Task type × Task phase |
2 |
29.500 |
7.607 |
.001* |
3.3 Care burden score (Composite load)
정신적 부담과 신체적 부담을 모두 포함하는 CBS 결과 역시 과업유형과 단계에 대한 주효과와 교호작용이 모두 통계적으로 유의한 것으로 나타났다(all p<0.05, Table 9). 로봇 사용 시 종합부하점수는 16.7±3.2%으로 Manual (18.1±6.5%) 사용 대비 약 8.0% 감소하였으며, 이러한 차이는 통계적으로 유의한 것으로 나타났다. Front phase (21.8±4.7%)에서 가장 높은 종합부하가 발견되었으며, Preparation phase (13.1±1.3%)에서 가장 낮은 부하점수가 관찰되었다. Preparation phase에서는 로봇 사용 시의 부하가 Manual 대비 유의하게 높은 것으로 나타난 반면 Front phase에서는 로봇 사용 시 Manual 대비 유의하게 낮은 종합부하가 관찰되었다(Figure 5).
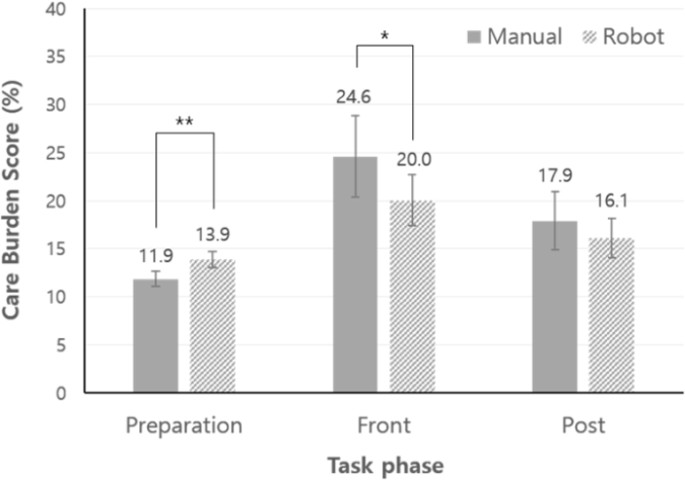
|
Factor |
DF |
MS |
F |
p-value |
|
Task type |
1 |
38.526 |
4.770 |
.032 |
|
Task phase |
2 |
550.975 |
68.217 |
.000* |
|
Task type × Task phase |
2 |
68.153 |
8.438 |
.001* |
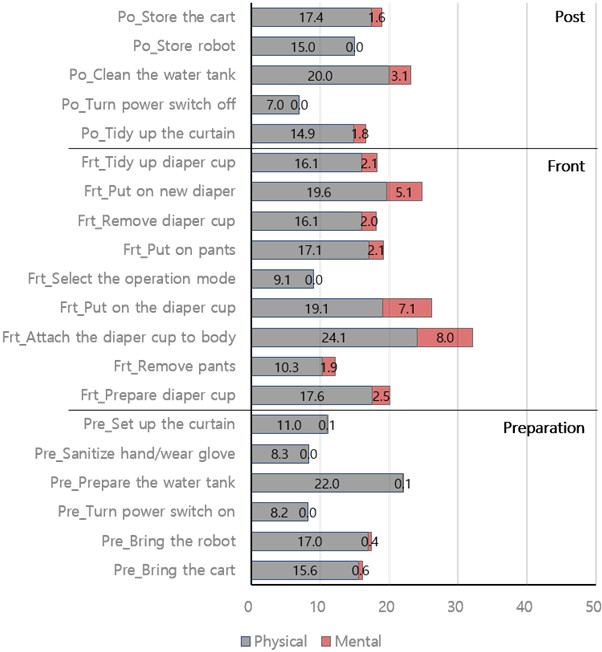
Figure 6과 Figure 7은 각각 Manual care와 Robot-aided care의 단위작업별 CBS 점수를 나타낸 그래프이다. 그래프 상의 Physical load와 Mental load를 합산한 값은 CBS 점수이다. MC의 정신적 부하점수가 RC 대비 상대적으로 높게 나타났으며, 그 중에서도 Front phase의 Clean up feces(배설물 세정)과 Remove the diaper(기저귀 제거)에서 높은 정신적 부하점수가 도출되었다(Figure 6). RC의 경우, 단위작업 수는 많으나 MC 대비 상대적으로 낮은 정신적 부하점수를 보였으며, 가장 큰 CBS 점수는 Front phase의 Attach the diaper cup to body(착용부 밀착)에서 관찰됐다(Figure 7).

본 연구에서는 요양현장에서 빈번하게 수행되는 배설돌봄과업의 작업부하를 다각도로 정량화 할 수 있는 체계적인 평가 기법을 개발하였다. 또한 로봇을 사용한 배설돌봄, 인력으로 수행되는 배설돌봄과업 각각에 대한 실측 데이터를 수집하여 본 연구에서 개발된 평가 체계에 적용하였으며, 이를 기반으로 배설로봇의 돌봄부담 경감 효과를 정량화하였다.
4.1 Development of evaluation method for excretion care burden
고령화에 따른 돌봄인력 부족 및 과중한 돌봄 업무 등의 문제가 사회적으로 대두되고 있음에도 현재 돌봄부담을 체계적으로 연구한 사례는 드물며, 이를 체계적으로 평가할 수 있는 표준화된 평가 방법 역시 전무하다. 기존의 연구들(Hui et al., 2001; Sawai et al., 2008; Shogenji et al., 2007; Yoto et al., 2010; Kyota and Tsukasaki, 2012; Kyota et al., 2013; Brinkmann et al., 2021)은 간호 및 요양 분야의 돌봄부담을 근활성도(Electromyography), 허리 굴곡각도(Trunk flexion angle), 디스크 압박력(Disc compressive force) 등의 신체적 지표를 중심으로 평가하였으나, 평가 방법이 표준화되지 않아 연구 간의 직접적인 결과 비교에 어려움이 있었다. 또한, 돌봄과업은 돌봄 제공자와 대상자 간의 상호작용이 동반되는 서비스 노동이라는 특성상, 신체적 부담 뿐만 아니라 정신적 부담 역시도 중요하게 고려되어야 함에도 불구하고 기존의 연구들에서는 이를 충분히 반영하지 못했다는 한계점을 지닌다. 본 연구에서는 기존 평가 방법의 한계를 극복하고자, 배설돌봄과업에서 경험하는 신체적 부담과 더불어 정신적 부담까지 종합적으로 고려하는 다차원적 평가 체계를 개발하고자 하였다. 특히 배설물 처리 과정에서 경험하는 악취, 시각적 불쾌감 등 감각적 스트레스(sensory stress)는 물론이고, 업무 수행 과정에서 발생할 수 있는 수치심, 자존감 저하와 같은 사회정서적 스트레스(socio-emotional stress)를 평가항목으로 추가하여, 기존 연구와 차별화된 보다 포괄적이고 심층적인 평가 체계를 구축하였다. 본 논문에서는 이러한 종합점수화 체계의 개발 및 산출 과정(가중치 부여 방법, 정규화 방법, 종합화 및 데이터 수집 방법 등)을 구체적으로 제시하였으며, 이를 통해 일관성 있는 기준을 제시하고자 하였다.
본 연구에서는 전문가 자문 및 AHP를 활용하여 배설돌봄과업에 적합한 주요 지표 6개를 선정하였으며, 중요도를 기반으로 지표별 상대 가중치를 도출하였다. 지표별 가중치와 지표별 데이터(점수)간 선형 결합을 통해 다양한 정보를 함축하고 있는 부담평가 지표(Care burden score, % CBS)를 개발하였다. 다수의 지표를 통합하였다는 관점에서 해당 평가 체계는 종합점수화(Composite index) 체계라고 할 수 있다. 3개의 신체적 부하 지표(근전도, 동작분석, 주관적 작업 강도)와 3개의 정신적 부하 지표(난이도, 자존감 하락, 배설물로 인한 불쾌함)를 결합하였으며, 모든 지표는 0부터 100 사이의 값으로 정규화하였다. 따라서 통합된 CBS 점수 역시 0부터 100 사이의 값을 가지며, 100에 근접할수록 신체적, 정신적 부담이 크다는 것을 의미한다. 체계적인 데이터 수집 및 분석을 위하여 배설돌봄과업을 단위작업으로 쪼개고 작업의 유형에 따라 준비작업(Preparation phase), 본 작업(Front phase), 마무리 작업(Post phase)으로 분류하는 Hierarchical Task analysis (HTA)를 수행하였다. 실험 역시 HTA에 따라 단위작업별로 6개의 실험 데이터가 수집되었다.
해당 평가 체계를 활용하면 서로 다른 유형의 과업 또는 단위작업간 돌봄부담을 직접적으로 비교할 수 있으며, % CBS (0: low care burden, 100%: high care burden)로 표현되는 직관적인 점수 체계로 비전문가도 문제가 되는 과업을 쉽게 파악할 수 있다는 장점을 지닌다. 이러한 특성은 해당 평가 체계가 다양한 방식으로 활용될 수 있음을 시사한다.
첫 번째로 돌봄로봇의 객관적 평가에 활용될 수 있다. 돌봄로봇이 다양한 분야에서 도입되고 있으나, 그 효과성에 대하여 주관적 경험에 의존하거나 단일 지표에 기반하는 경우가 많기 때문에 과학적 근거로 활용되기에는 한계점이 있다. 해당 평가 체계는 돌봄로봇의 신체적, 정신적 부하 경감 효과를 객관적인 수치로 제시할 수 있다는 점에서 기존의 불확실했던 돌봄로봇의 효과성을 명확히 제시할 수 있다는 장점을 지닌다. 이는 소비자가 로봇 도입 여부를 보다 합리적으로 판단하기 위한 객관적 근거로 활용될 수 있다. 더 나아가 돌봄로봇의 효과성이 객관적으로 입증되면, 정부 및 연구 기관, 기업들은 보다 적극적으로 돌봄로봇 개발 및 투자를 추진할 수 있을 것이며, 장기적으로는 돌봄 산업 전반의 발전 가능성을 높이는 데 기여할 수 있을 것이다.
두 번째로 돌봄 업무 종사자의 근무환경 개선을 위해 활용될 수 있다. 제조업의 경우, 근골격계 유해요인 조사 제도를 통해 작업자의 신체부담을 지속적으로 모니터링하고 개선안을 도입하는 것이 보편화 되어있는 반면, 돌봄 분야의 종사자를 대상으로 한 유사한 정책적 지원과 연구는 상대적으로 부족한 실정이다. 특히 고령화로 인해 돌봄 노동 수요가 지속적으로 증가하고 있는 시점에서 돌봄 종사자들의 부담을 객관적으로 평가하는 것은 매우 중요하다. 이러한 관점에서 해당 평가 체계는 돌봄부담을 객관적으로 평가하는데 유용하게 활용될 수 있다. 정책 입안자들은 해당 체계로부터 도출된 데이터를 바탕으로 돌봄 노동의 강도를 정확히 파악하고, 이를 기준으로 노동 강도를 경감시키기 위한 작업환경 및 근무조건 개선을 위한 정책 수립에 효과적으로 활용할 수 있을 것이다. 궁극적으로 돌봄 종사자의 안전한 노동환경 구축 및 돌봄 서비스의 질적 향상을 도모할 수 있을 것이라 기대된다.
마지막으로, 본 평가 체계는 돌봄로봇 개발자의 관점에서도 로봇의 운용상의 문제점을 진단하는 도구로 유용하게 활용될 수 있다. 로봇 사용 과정에서 정신적, 신체적 부하가 높은 Pain point를 직관적으로 파악하여 이를 해소하기 위한 개선안 도출에 도움이 될 수 있다. 개선된 프로토타입에 대하여 개선 효과 역시 평가할 수 있으며, 지속적인 개선과 평가를 통해 사용자 중심의 효율적이고 편리한 로봇 개발에 기여할 수 있을 것이다.
그러나 해당 평가 체계의 단점도 존재한다. 지표의 선택과 가중치 부여 과정에서 전문가 집단의 주관적 의견이 강하게 개입될 수 있다는 점이다. 이를 위하여 향후 더욱 다양한 집단, 많은 수의 전문가를 대상으로 AHP를 수행하여 가중치 일부를 수정 · 보완해야 할 필요성이 있다고 사료된다.
4.2 Comparison of CBS between manual care and robot-aided care
본 연구의 결과를 토대로 해당 평가 체계의 적용 가능성을 검토하고자 모의실험을 수행하였다. 전통적 배설돌봄과업(Manual care, MC)과 로봇을 활용한 배설돌봄과업(Robot-aided care, RC)간의 돌봄부담을 정량적으로 비교하기 위하여 16명의 요양보호사를 대상으로 실험을 수행하였다.
돌봄로봇의 효과를 신체적, 정신적인 부분으로 구분하여 살펴보기 위해서 Physical load, Mental load에 대해서 분석하였으며, 종합적인 효과에 대해서는 Composite load를 이용하여 분석하였다. 먼저 Physical load의 경우, 본 작업단계와 마무리 작업단계에서는 돌봄로봇 사용 여부에 따른 부하점수의 차이가 유의하지 않았지만, 준비단계에서는 로봇 사용 시 신체적 부하가 약 2%p 정도 유의하게 증가한다는 결과가 관찰되었다. Manual care의 경우 준비단계를 구성하는 과업은 카트 가져오기, 손소독 및 일회용 장갑 착용, 가림막 및 침구류 세팅의 세 단위작업으로 구성되는 반면, Robot-aided care는 로봇 가져오기, 세정수통 세팅 등 로봇 사용을 위한 단위작업이 추가된다. 세정수를 운반하거나 허리를 숙여 로봇을 이동시키는 등의 RC에서 새롭게 추가된 일부 과업이 높은 신체적 부하를 야기했기 때문이라고 사료된다.
정신적 부하의 경우, 배설물을 세정 등 주요 작업이 포함된 Front phase에서 RC의 정신적 부하가 MC 대비 유의하게 낮은 것으로 나타났다. MC의 Front phase에 포함되어 있는 배설물 세정과 기저귀 제거 작업에서 매우 높은 정신적 부하점수가 관찰되었다. 로봇을 사용하는 경우, 직접적인 배설물 접촉이 사라지기 때문에 정신적 부하가 큰 폭으로 감소한 것으로 사료된다. 이에 반해 Preparation 및 Post phase에서는 RC, MC간 정신적 부담의 차이가 유의하지 않은 것으로 나타났다. MC 대비 비교적 복잡하고 많은 절차를 수반하는 로봇 사용이 돌봄 제공자의 정신적 부하를 증가시키지 않았다는 것으로 해석될 수 있다.
신체적, 정신적 부담을 모두 포함하는 Composite load (% CBS)의 경우, 과업유형 및 단계에 대한 주효과와 교호작용 모두 유의한 것으로 나타났다. Preparation phase에서의 종합부담점수는 RC가 유의하게 높은 반면, Front phase에서는 RC의 부담이 유의하게 낮은 것으로 나타났다. 과업단계 별로 로봇의 돌봄부담 경감 효과는 상이하였으나, 전반적으로 로봇에 의해 증가된 CBS보다 로봇에 의해 감소한 CBS가 더욱 크다는 점에서 로봇이 돌봄부담 일부를 경감시켜 줄 수 있을 것이라고 해석해 볼 수 있다.
4.3 Further study
본 연구에서는 돌봄부담을 평가할 수 있는 체계를 개발하였으며, 로봇 사용과 전통적 배설돌봄 데이터를 활용하여 해당 평가 체계의 적용 가능성을 논의하였다. 배설돌봄로봇의 돌봄부담 경감 효과는 연구진이 예상했던 바보다 낮았으나, Front phase에서 MC 대비 약 4.6%p의 CBS가 경감하는 효과가 관찰되었다.
돌봄부담 경감 효과가 비교적 낮게 도출된 이유는 다음과 같다. 먼저 해당 연구는 기저귀 케어 1회와 돌봄로봇의 착용-탈거 1회를 단순 비교하였다. 일반적인 배설돌봄로봇은 장시간 착용을 목적으로 하며, 착용하는 동안 로봇이 돌봄 제공자의 기저귀 케어 과업을 대체하기 때문에 돌봄 대상자가 용변을 본 횟수가 증가함에 따라 돌봄부담의 경감 효과는 비례하여 증가한다. 따라서 요실금 또는 변실금 환자가 배설돌봄로봇을 사용하는 경우, 로봇 사용으로 인한 돌봄부담 경감 효과는 큰 폭으로 증가할 수 있기 때문에 향후 장시간 사용을 위한 시나리오, 돌봄 대상자의 배설 패턴 등을 고려한 연구가 추가적으로 수행될 필요가 있다. 본 연구는 이러한 장시간 착용 시나리오를 고려하지 않았다는 한계점을 갖고 있으나, 실험을 통해 도출된 CBS 데이터를 기반으로 배설돌봄로봇의 사용 특성 및 시나리오를 반영할 수 있는 방법에 대하여 연구할 예정이다.
두 번째 한계점으로는 제안된 평가 체계의 현장 적용을 위해서는 많은 시간과 노력이 필요하다는 점이다. 본 평가 체계는 근전도와 동작분석 장비를 필요로 하며, 센서 부착, 캘리브레이션, MVC 측정에 이르기까지 복잡한 절차로 인해 데이터 수집에 상당한 시간과 인적자원이 소요된다. 이는 실제 요양시설과 같은 현장 상황에서의 활용성을 제한하는 요소로 작용할 가능성이 크다. 따라서 현장 적용을 위해서는 핵심 지표만을 추출하여 측정 절차를 간소화할 수 있는 평가 체계의 개발이 필수적이며, 향후 이를 위한 추가적인 연구가 필요할 것이라고 사료된다.
세 번째 한계점으로 본 연구는 실제 돌봄 대상자가 아닌 더미를 대상으로 수행되었다는 점이다. 따라서 배설물을 직접 접하는 실제 배설돌봄과업에 비하여 신체적 및 정신적 부하가 상대적으로 낮게 측정되었을 가능성이 있다. 따라서 향후 실제 요양환경에서 돌봄 대상자를 대상으로 한 실증 연구가 필요할 것으로 사료된다.
또한 본 연구에서는 제한된 피험자만을 대상으로 실험을 수행하였기 때문에 일반화할 수 없다는 한계점을 지닌다. 본 연구는 요양시설에 근무중인 여성 돌봄 제공자만을 대상으로 하였으며, 참가자 모두 배설 로봇의 사용 경험이 충분하지 않은 초보 사용자였다. 향후 다양하고 폭 넓은 피험자군을 대상으로 한 연구를 통해 성별, 연령 및 숙련도 등에 따른 돌봄부담의 차이를 규명할 필요가 있을 것이다. 특히 돌봄 제공자의 기저귀 케어와 로봇 사용에 대한 숙련도는 신체적, 정신적 부담에 큰 영향을 미칠 가능성이 있으므로, 돌봄부담에 대한 숙련도의 수준별 차이를 규명하는 연구 역시 중요하다고 사료된다.
마지막으로 본 평가 체계는 여러 지표를 결합한 종합 지표로서 일부 지표가 서로 유사한 특성을 가지는 경우, 특정 정보가 중복적으로 반영될 우려가 있다. 본 연구의 신체부담 영역의 근전도와 동작분석 데이터는 다양한 연구에서 상관관계가 일정 수준 확인되고 있기 때문에 지표간 차별성이 저하된다는 문제가 제기될 수 있다. 그러나 본 연구에서 대상으로 하는 배설돌봄과업의 경우, 단순한 동작을 반복하는 것이 아니라 여러 관절과 근육의 움직임이 동반되는 복잡하고 섬세한 동작으로 구성되어 있기 때문에 두 지표간 상관성이 다소 낮을 수 있을 것이라고 짐작된다. 그렇다고 할지라도 이러한 우려를 해소하여 결과의 신뢰성을 확보할 필요성이 있다고 여겨지는 바, 향후 지표간 상관관계 진단을 통해 지표를 통합 및 배제하여 지표간 독립성을 더욱 높이는 등 평가 체계를 한 층 더 견고히 할 필요가 있다고 사료된다. 뿐만 아니라 본 연구에서는 고려하지 못했던 다양한 지표(근피로도, 심박수, 작업효율, 작업시간 등)에 대해서도 확장된 연구를 통해 해당 평가 체계를 발전시킬 필요성이 있다고 사료된다.
References
1. Borg, G., Principles in scaling pain and the Borg CR scales. Psychologica, 37, 35-47, 2004a.
2. Borg, G., Handbook of human factors and ergonomics methods. In: Chapter. Scaling Experiences during Work: Perceived Exertion and Difficulty. CRC Press, 2004b.
Google Scholar
3. Brinkmann, A., Fifelski-von Böhlen, C., Hellmers, S., Meyer, O., Diekmann, R., Hein, A. and Böhlen, C., Physical Burden in Manual Patient Handling: Quantification of Lower Limb EMG Muscle Activation Patterns of Healthy Individuals Lifting Different Loads Ergonomically. HEALTHINF, 5, 451-458, 2021.
Google Scholar
4. Cardoso, S.M.M., Rodrigues, A.P., Sperling, S.G., Machado, N.C.B., Rocha, L.S., Seiffert, M.A. and Fernandes, R.F.M., Cuidadores de idosos em estratégias de saúde da família: o estresse destes indivíduos. Revista Eletrônica Acervo Saúde, 49, e3179-e3179, 2020.
Google Scholar
5. Cho, G.Y. and Park, J.S., A study on the characteristics of urinary incontinence, related problems, and management in elderly women in nursing homes. Journal of Korean Gerontological Nursing, 11(2), 162-172, 2009.
6. Edwards, D., Burnard, P., Bennett, K. and Hebden, U., A longitudinal study of stress and self-esteem in student nurses. Nurse Education Today, 30(1), 78-84, 2010.
Google Scholar
7. Engels, J.A., Van Der Gulden, J.W.J., Senden, T.F., Hertog, C.A.W.M., Kolk, J.J. and Binkhorst, R.A., Physical work load and its assessment among the nursing staff in nursing homes. Journal of Occupational and Environmental Medicine, 36(3), 338-345, 1994.
Google Scholar
8. Feyen, R., Lie, Y., Chaffin, D., Jimmerson, G. and Joseph, B., Computeraided ergonomics: a case study of incorporating ergonomics analyses into workplace design, Applied Ergonomics, 31, 291-300, 2000.
Google Scholar
9. Hadjittofi, M., Gleeson, K. and Arber, A., The experience of disgust by healthcare professionals: A literature review. International Journal of Nursing Studies, 110, 103720, 2020.
Google Scholar
10. Hart, S.G. and Lowell, E.S., Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. Human mental workload, North-Holland, Oxford, England, 139-183, 1988.
Google Scholar
11. Hilton, N.Z., Ham, E. and Dretzkat, A., Psychiatric hospital workers' exposure to disturbing patient behavior and its relation to post-traumatic stress disorder symptoms. Canadian Journal of Nursing Research, 49(3), 118-126, 2017.
Google Scholar
12. Huang, C.J., Webb, H.E., Zourdos, M.C. and Acevedo, E.O., Cardiovascular reactivity, stress, and physical activity. Frontiers in Physiology, 4, 314, 2013.
Google Scholar
13. Hui, L., Ng, G.Y., Yeung, S.S. and Hui-Chan, C.W., Evaluation of physiological work demands and low back neuromuscular fatigue on nurses working in geriatric wards. Applied Ergonomics, 32(5), 479-483, 2001.
Google Scholar
14. Kyota K. and Tsukasaki K., Low back load differences between novice and skilled caregivers when changing a diaper on a futon and a bed. Journal of the Tsuruma Health Science Society Kanazawa University, 36(2), 25-34, 2012.
Google Scholar
15. Kyota, K., Tsukasaki, K. and Nomura, A., Low back load produced by changing a diaper at various bed heights experienced by female care workers in a nursing home. Journal of Physical Therapy Science, 25(4), 469-475, 2013.
Google Scholar
16. Lim, J. and Lee, Y., Analysis and Prospects for the Supply-Demand Gap of Care Workers, The Journal of Humanities and Social Sciences 21, 12(6), 2255-2268, 2021.
Google Scholar
17. Lim, K.C. and Kim, M., Older Adults' Experiences of Living with and Using Diapers for Urinary Incontinence in Long-term Care Facilities, Journal of Muscle and Joint Health, 26(2), 90-101, 2019.
Google Scholar
18. Luger, T., Bär, M., Seibt, R., Rieger, M.A. and Steinhilber, B., Using a back exoskeleton during industrial and functional tasks—Effects on muscle activity, posture, performance, usability, and wearer discomfort in a laboratory trial. Human Factors, 65(1), 5-21, 2023.
Google Scholar
19. Ministry of Health and Welfare, Health and welfare statistical year book 2023. 2023.
20. Miyaji, A., Kimata, Y., Matsui, T., Fujimoto, M. and Yasumoto, K., Analysis and Visualization of Relationship between Stress and Care Activities toward Reduction in Caregiver Workload. Sensors & Materials, 34, 2022.
Google Scholar
21. Mroz, E.L., Poulin, M.J., Grant, P.C., Depner, R.M., Breier, J., Byrwa, D.J. and Wright, S.T., Caregiver self-esteem as a predictor of patient relationship satisfaction: a longitudinal study. Journal of Palliative Medicine, 21(3), 376-379, 2018.
Google Scholar
22. Oliveira, P.C., Amorim, P.B., Ribeiro, L.A., Rocha, M.E.S.T. and Mourão, R.S., Musculoskeletal complaints in caregivers of the elderly in the municipality of Ecoporanga-ES. International Seven Journal of Health Research, 2(5), 1180-1195, 2023.
23. Omli, R., Skotnes, L.H., Romild, U., Bakke, A., Mykletun, A. and Kuhry, E., Pad per day usage, urinary incontinence and urinary tract infections in nursing home residents. Age & Ageing, 39(5), 549-554, 2010.
Google Scholar
24. Ousey, K., Roberts, D. and Stephenson, J., Exploring psychology and nursing students perceptions of disgust. Journal of Nursing Education and Practice, 7(1), 17-20, 2016.
Google Scholar
25. Özkan, İ., Taylan, S., Adıbelli, D. and Yılmaz, F.T., Investigation of the relationship between nursing students' disgust sensitivity and caring behaviours. Nurse Education in Practice, 54, 103090, 2021.
26. Robinson, P., Task complexity, task difficulty, and task production: Exploring interactions in a componential framework. Applied Linguistics, 22(1), 27-57, 2001.
Google Scholar
27. Saaty, T.L., Priority setting in complex problems. IEEE Transactions on Engineering Management, 30(3), 96-108, 1983.
Google Scholar
28. Saaty, T.L., Decision making—the analytic hierarchy and network processes (AHP/ANP). Journal of Systems Science and Systems Engineering, 13, 1-35, 2004.
Google Scholar
29. Sasat, S., Burnard, P., Edwards, D., Naiyapatana, W., Hebden, U., Boonrod, W. and Wongmak, W., Self-esteem and student nurses: A cross-cultural study of nursing students in Thailand and the UK. Nursing & Health Sciences, 4(1-2), 9-14, 2002.
Google Scholar
30. Sawai, S., Takai, Y., Saegusa, K., Yoshioka, T. and Fukunaga, T., Levels of muscular activity in different parts of the body during basic nursing actions. International Journal of Sport and Health Science, 6, 1-14, 2008.
Google Scholar
31. Shogenji, M., Izumi, K., Seo, A. and Inoue, K., Biomechanical analysis of the low back load on healthcare workers due to diaper changing, Journal of the Tsuruma Health Science Society Kanazawa University, 31(2), 57-69, 2007.
Google Scholar
32. Song, H.J., Kim, S.M. and Kim, N.C., A study of voiding patterns and pressure ulcer for the residents of long term care facilities. International Neurourology Journal, 7(2), 91-97, 2003. https://doi.org/10.5213/jkcs.2003.7.2.91
Google Scholar
33. Wald, A. and Harrison, L.B., Oxygen consumption and heart rate: changes and relationships in static work. Ergonomics, 18(3), 299-309, 1975.
Google Scholar
34. Waters, T.R., Putz-Anderson, V. and Garg, A., Applications Manual for the Revised NIOSH Lifting Equation. Cincinnati, National Institute for Occupational Safety and Health, 1994.
Google Scholar
35. Yoto, T.Y., Sakuragawa, S., Suzuki, T.A., Tamura, H., Yamaki, R., Fujioka, Y. and Katsuura, T., Changes of Muscular Load with Aging in the Motion of Pulling up Disposable Diapers. Journal of Physiological Anthropology, 29(2), 51-58, 2010.
Google Scholar
PIDS App ServiceClick here!