eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Yujun Cho
, Jaekyu Park
, Sungjun Park
, Eui S. Jung
10.5143/JESK.2017.36.2.87 Epub 2017 April 27
Abstract
Objective: The purpose of this study was to precede the acceptance study based on automation steps and user experience that was lacked in the past study on the core technology of autonomous vehicle, ADAS. The first objective was to construct the acceptance model of ADAS technology that is the core technology, and draw factors that affect behavioral intention through user experience-based evaluation by applying driving simulator. The second one was to see the change of factors on automation step of autonomous vehicle through the UX/UA score.
Background: The number of vehicles with the introduction of ADAS is increasing, and it caused change of interaction between vehicle and driver as automation is being developed on the particular drive factor. For this reason, it is becoming important to study the technology acceptance on how driver can actively accept giving up some parts of automated drive operation and handing over the authority to vehicle.
Method: We organized the study model and items through literature investigation and the scenario according to the 4 stages of automation of autonomous vehicle, and preceded acceptance assessment using driving simulator. Total 68 men and woman were participated in this experiment.
Results: We drew results of Performance Expectancy (PE), Social Influence (SI), Perceived Safety (PS), Anxiety (AX), Trust (T) and Affective Satisfaction (AS) as the factors that affect Behavioral Intention (BI). Also the drawn factors shows that UX/UA score has a significant difference statistically according to the automation steps of autonomous vehicle, and UX/UA tends to move up until the stage 2 of automation, and at stage 3 it goes down to the lowest level, and it increases a little or stays steady at stage 4.
Conclusion and Application: First, we presented the acceptance model of ADAS that is the core technology of autonomous vehicle, and it could be the basis of the future acceptance study of the ADAS technology as it verifies through user experience-based assessment using driving simulator. Second, it could be helpful to the appropriate ADAS development in the future as drawing the change of factors and predicting the acceptance level according to the automation stages of autonomous vehicle through UX/UA score, and it could also grasp and avoid the problem that affect the acceptance level. It is possible to use these study results as tools to test validity of function before ADAS offering company launches the products. Also it will help to prevent the problems that could be caused when applying the autonomous vehicle technology, and to establish technology that is easily acceptable for drivers, so it will improve safety and convenience of drivers.
Keywords
Technology acceptance model User experience Autonomous vehicle Advanced driver assistance system
As digitalization, multimedia, and networking have become core elements of automotive technology, the development of intelligent high-technology vehicles is accelerating (Yoon and Kim, 2012). One of the core technologies for intelligent and autonomous vehicles is the Advanced Driver Assistance System (ADAS), which is a driving-assistant device that helps a driver take appropriate measures or maintain a safe driving condition by controlling the vehicle automatically by means of high-technology sensors and intelligent imaging units that collect external environment data (Shin et al., 2016).
The number of vehicles that adopt the ADAS is increasing continually, and the automation of specific driving elements such as speed control and steering control are particularly advancing (Rödel et al., 2014). The development of the ADAS, however, has also cuased changes in interactions between a vehicle and its driver (Eckoldt et al., 2012). While the decision-making process was carried out only by the driver in the past, this system results in co-decision, that is, cooperation between a vehicle and its driver (Rödel et al., 2014). For instance, when it comes to a decision to maintain a certain level of speed, a driver has adjusted the speed in recognition of the car in front and surrounding environments. Vehicles that adopt the Advanced Cruise Control (ACC) function, as part of the ADAS, adjust the speed depending on the distance from the car in front automatically even if the driver does not step on the accelerator. The driver may intervene only in a certain situation that occurs. As such, interactions between a car and its driver have changed. To guarantee appropriate interactions to drivers, therefore, the investigation on the extent that drivers are willing to give up a part of manipulations in driving and accept automation of vehicles is of greater importance than before (Rödel et al., 2014).
As for the research on drivers' acceptance of the ADAS, the main focus has been additional factors to the existing Technology Acceptance Model (TAM) model in order to explain the extent of acceptance as in other similar areas (Ghazizadeh et al., 2012). According to researches on ADAS acceptance, people, in general, have positive attitudes toward the ADAS and autonomous vehicles, but Rödel et al. (2014) points out the limitation of existing studies in that they neglect or fail to carefully take into consideration the automation step of autonomous vehicles. Since this kind of automation may lead of a serious accident challenging to resolve when it involves an error, it is of significant necessity to include the automation step as part of researches on the ADAS (Lee and Kirlik, 2013). Particularly, driving conditions may involve many threatening elements or irregular situations around the car, and thus accepting the ADAS and autonomous vehicles is a quite sensitive matter that is directly connected with a driver's life. Nonetheless, existing researches are based merely on imaginary scenarios of the ADAS as Rödel et al. (2014) pointed out. To collect accurate data regarding the extent of ADAS acceptance, therefore, the necessity of acceptance assessment based on the automation step and actual experiences of users is more emphasized.
Accordingly, this study includes acceptance investigation based on the automation step and user experience, which have been little considered in existing researches on the ADAS, the core technology of autonomous vehicles. The objectives of the present study are as follows: First, it derives factors that affect Behavbioral Intention (BI) based on user experience assessment by designing an acceptance model of the ADAS, which is the core technology of autonomous driving and by utilizing a driving simulator; and second, this study examines changes and differences in each factor's User Experience and Acceptance (UX/UA) score depending on the autonomous vehicle automation step.
2.1 Unified theory of acceptance and use of technology
The TAM was first suggested by Davis (1986). The TAM is advantageous in that it is simple and easy to understand, proving a high level of explanatory power among various types of users and systems (Im and Oh, 2012). Since the limitation of the TAM was thereafter found in that it failed supporting the validity of various extraneous variables and the relation among them, the developed Unified Theory of Acceptance and Use of Technology (UTAUT) integrated significant 32 factors from researches on the use and intention to derive 4 core elements. This integrative theory also presented an analysis model on use intentions, acceptance, and use behaviors (Venkatesh et al., 2003).
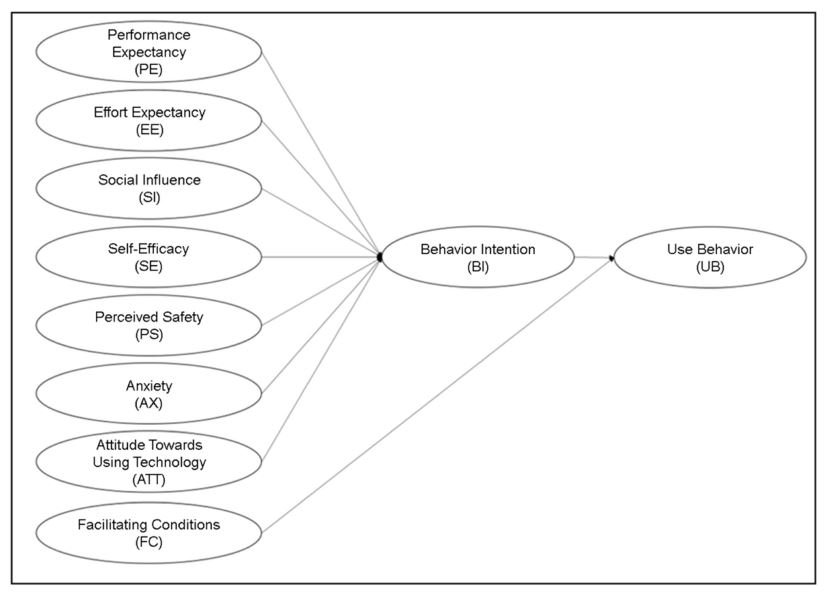
Researches on the TAM add new factors to an existing model to explain the level of acceptance among users and produced a model thereof (Brookhuis and Brown, 1992; Bajaj and Nidumolu, 1998; Dishaw and Strong, 1999; Karahanna et al., 2006). It is known that for vehicles, the very object of this study, a rework is essential for a technology acceptance model in consideration of the specific condition - driving (Osswald et al., 2012). Accordingly, existing researches that include rework of the TAM and UTAUT were examined. For instance, Adell (2010) measured the extent of Driver Support System acceptance by means of a UTAUT model, proposing a modified UTAUT model based on the findings of the study on the effect of Performance Expectancy (PE), Effort Expectancy (EE), and Social Influence (SI) on Behavioral Intention (BI) with existing question items of the UTAUT model modified. Osswald et al. (2012) conducted a study with the aim to propose a driver acceptance model in relation to automation of vehicles. In addition, the Car Technology Acceptance Research Model (CTAM) was proposed based on recognized safety and anxiety factors with an expanded UTAUT model. When the CTAM was proposed (Figure 1), independent variables included the basic factors of the UTAUT such as Performance Expectancy (PE), Effort Expectancy (EE), Social Influence (SI), and Facilitating Conditions (FC). In addition, Anxiety (AX), Self-Efficacy (SE), and Perceived Safety (PS), Attitude towards Using Technology (ATT) were also included. Dependent variables included Behavioral Intention (BI) and Use Behavior (UB).
This study examines the extent of driver acceptance of the ADAS. To derive variables that would affect user behavioral intention, adopted was an ITAIT model, which is the most successful integrative model that features superior explanatory power to that of the existing TAM and includes many variables. Additionally, the study model was designed in reference to the CTAM and on the basis of the UTAUT model.
2.2 Acceptance of ADAS in the car
User acceptance is defined as "an intention to use willingly information technology that is embodied to support users (Dillon, 2001)". In addition, the study of Adell (2010) defines driver acceptance as "the extent of a driver's s intention to use the system while driving if it is available". These definitions clarify the correlation between the extent of acceptance and use. In other words, an individual's intention of us is defined as driver acceptance.
As for existing researches on ADAS acceptance, Brookhuis and De Waard (2006) conducted a study on acceptance of automated public transportation vehicles (Phileas). According to the result, it turned out that drivers preferred complete automation for about 55% of the entire route. Schaller et al. (2008) examined the acceptance of single/combined versions of the ADAS in a situation of traffic congestion by means of a driving simulation. 81% of the participants preferred the ACC function combining lane keeping assistance functions to single ACC functions. In addition, about 80% of the participants showed a high level of acceptance with hands off the steering wheel while using the combined ACC functions. Becker (1994) and Nilsson (1995) as well showed that participants found the ACC useful, comfortable, and safer. While these researches point out positive attitudes toward and a high level of acceptance of the ADAS, there are studies on negative aspects. Helldin et al. (2013) visualized uncertain aspects during a scenario of autonomous vehicle driving to verify its effect on the driver's Trust (T). The visualization of uncertain aspects decreased the general T and acceptance during the autonomous driving. De Waard et al. (1999) conducted a study on the driver's acceptance in vehicle platooning, and it turned out that the acceptance of vehicle platooning decreased as a high level of risk and a low level of safety were recognized. As such, researches on ADAS acceptance produced different results depending on the scope of study and the level of automation.
Additionally, some researches investigated ADAS acceptance based on the factors of User Acceptance (UA) and User Experience (UX). Adell (2010) measured the extent of Driver Support System acceptance by means of a UTAUT model, proposing a modified UTAUT model based on the findings of the study on the effect of Performance Expectancy (PE), Effort Expectancy (EE), and Social Influence (SI) on Behavioral Intention (BI). Trösterer et al. (2014) conducted a study on the extent of acceptance and user experience over time as the parking assistance function of the ADAS was utilized. Based on the existing CTAM thesis, the following UA and UX factors were selected: Performance Expectancy (PE), Effort Expectancy (EE), Attitude towards Using Technology (ATT), Social Influence (SI), Facilitating Conditions (FC), Self-Efficacy (SE), Anxiety AX, Perceived Safety (PS), and Behavioral Intention (BI). Trust (T) was added as one of the major factors related to ADAS functions. Rödel et al. (2014) classified ADAS functions depending on the automation levels of National Highway Traffic Safety Administration (NHTSA) and conducted a study on the extent of acceptance and user experience based on the scenario survey. UX/UA factors included Perceived Easiness of Use (PEU), Attitude (ATT), Perceived Behavioral Control (PBC), Behavioral Intention (BI), Trust (T), and Fun (F). Changes in each factor depending on the automation step are examined to derive major factors and verify the intention of using the ADAS. Unlike the study of Rödel et al. (2014) which was conducted based on a scenario survey, this study utilizes a simulator for assessment based on user experience. In addition, factors that might affect BI were also analyzed.
For this study, factors that might affect BI, which indicates the extent of driver acceptance, are selected based on literary investigation. These factors include PE, EE, SI, SE, AX, and PS. Banuls eseda et al. (1997) conducted a study on the correlation between driver AX and the risk of accidents. As a result, it turned out that AX was in correlation with the risk of accidents. In a study of Groeger (1997), it also turned out that a driver's sentiment (anxiety) affected the driving performance. In this study, accordingly, it was assumed that AX would affect BI significantly. Perceived Safety (PS) is mentioned as an important factor of driving in a study of Osswald et al. (2012). According to Alm and Lindberg (2000), the perceived risk of accidents affect the driver's feeling of safety and anxiety. In this study, therefore, it was assumed that PS would affect BI significantly. Trust (T) is of special importance since it is related to risks in driving. One study (Parasuraman et al., 2008; Trösterer et al., 2014) states that the extent of T in automation is an important factor that decides the user's acceptance and reliance. Thus, it was assumed that T would affect BI significantly and that changes would occur depending on the automation step. Finally, this study adds the factor of Affective Satisfaction (AS) which the user feels when experiencing the ADAS personally during the driving simulation. Adell (2010) states that in consideration of the specific situation of a vehicle, factors through which the driver's sentimental and emotional reactions need to be added to the UTAUT model. In existing researches on information systems, user satisfaction was used as a substitution variable to system success. It is known that this can be an excellent indicator of achievement when a system is used voluntarily at the user's discretion rather than compulsorily as a result of external influence (DeLone and McLean, 1992; Cavaye, 1995). Thus, this study assumes that AS is an appropriate scale because the system is used voluntarily by the driver. In contrast, it turned out that Facilitating Conditions (FC) affect UB rather than BI directly in the UTAUT and CTAM. Facilitting Conditioins (FC) were excluded in this study because the focus is on the 3rd and 4th levels of the autonomous vehicle driving automation which will be realized in the future. The dependent variable is not UB that is determined based on the current level of use and use experience in the past but BI that indicates an intention or plan to use it at present or in the future. It is appropriate, therefore, to exclude FC that is assumed to affect UB directly. Some existing studies (Wang et al., 2009; Lee, 2012) as well excluded UB and FC in the analysis. The attitude toward technology use (ATT) is defined as a positive or negative feeling and an individual has about using a certain technology. In this study, ATT is replaced with Affective Satisfaction (AS) which indicates the extent of emotional/sentimental experience that an indivisual perceives while using a technology.
3.1 Study model and variable definition
In this study, the study model and measurement items are selected based on factors (PE, EE, SI, PS, AX, T, SF, SE, BI) that were determined through the literary investigation (Figure 2).
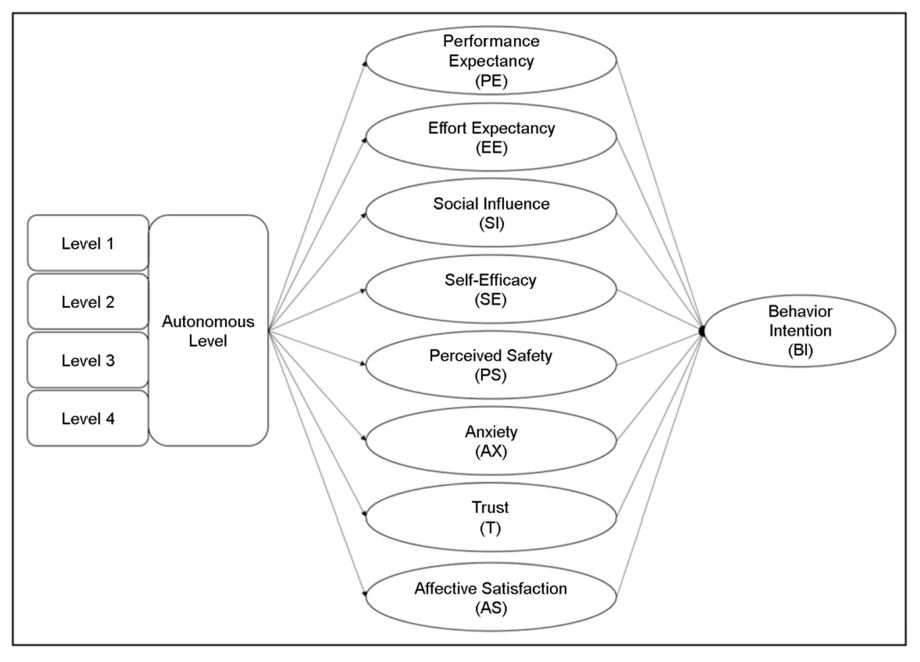
To examine factors that would affect BI, 8 independent variables (PE, EE, SI, PS, AX, T, SF, SE) and one dependent variable (BI) were selected. Factor definitions and measurement items are presented in Table 1. To examine changes in UX/UA scores of each factor, the basic scores of UX/UA of each factor were set as dependent variables with autonomous vehicle automation as an independent variable. The autonomous vehicle automation was set to 4 levels: Level 1, Level 2, Level 3, and Level 4. Additionally, differences in UX/UA scores of each factor depending on past uses and sex distinction were examined. For difference in UX/UA scores depending on past uses, first of all, UX/UA scores were set as a dependent variable with past uses as an independent variable. As for past uses, if there is an experience of us, it was set to Yes, and otherwise, No. For difference in UX/UA scores depending on sex distinction, the basic scores of UX/UA of each factor were set as dependent variables with sex distinction as an independent variable. Sex distinction was set to 2 levels: men and women.
|
Variable |
Factor |
Definition |
Item |
Sources |
|
Independent |
Performance Expectancy |
Standard of
driver's belief using ADAS function to help driving |
This
function will be useful while driving |
(Osswald et al., 2012) |
|
This
function will be important aspect in a car |
||||
|
sing this
function is convenient to drive |
||||
|
Effort Expectancy |
Standard of
convenience awareness when using ADAS function |
It is
difficult to learn how to use this function |
(Osswald et al.,
2012) |
|
|
It is easy
to become skillful about the method |
||||
|
Using this
function is easy and simple to understand |
||||
|
Social Influence |
Standard of
the importance of other's opinion when using |
Showing
this function to others will make me proud of myself |
(Osswald et al., 2012) |
|
|
Other
people want me to use this function |
||||
|
Other
people will encourage me when I use |
||||
|
Self-Efficacy |
Standard of
user's |
In the case
of large amount of time, I will implement this function perfectly |
(Osswald et al., 2012) |
|
|
Even though
there is no one to let me know how to use it, I will be able to implement
this function perfectly |
||||
|
If I have
an instruction of using this function, |
||||
|
Perceived Safety |
Standard of
ADAS function's influence |
I believe
using this function might |
(Osswald et al., 2012) |
|
|
Using this
function does not really bother |
||||
|
I believe
using this function is safe |
||||
|
Anxiety |
Standard of
individuals' ability of perception and response when feeling uneasy |
I am
worried about using this function |
(Osswald
et al., 2012) |
|
|
I believe
this function might cause accidents |
||||
|
I am not
afraid of using this function |
||||
|
Independent |
Trust |
Standard of positive
expectation of well-operated when using ADAS function with involving a risk
system |
I believe this function is
verified professionally |
(Ryu and Kwon,
2005) |
|
I believe this function is
reliable |
||||
|
I believe this function
will be working in regard |
||||
|
Affective Satisfaction |
Standard of positive,
negative, and emotional expectation of driver after using ADAS function |
This function makes me
satisfied |
(Park et al.,
2014) (Park and Kim,
2014) |
|
|
Overall, this function
meets my expectation |
||||
|
I will recommend this
function to others |
||||
|
Dependent |
Behavior Intention |
Standard of driver’s willingness to use ADAS function |
Henceforth, I am willing
to use this function |
(Osswald et
al., 2012) |
|
Henceforth, I am willing
to use this function frequently when I will be able to |
||||
|
If it is possible to
remain operation continuously, |
||||
|
|
||||
3.2 Assessment scenario/function derived
To derive assessment scenarios depending on the autonomous vehicle automation step, this study refers to the 'Explanation on the 5 levels of Autonomous Vehicle Automation' proposed by the NHTSA. According to the NHTSA (2013), Level 0 is the step of No-Automation where manipulations for driving are carried out solely by the driver. Level 1 is the step of function-specific automation where one or more manipulations for driving are carried out automatically by the vehicle. Level 2 is the step of combined function automation where at least two or more manipulations for driving are carried out automatically by the vehicle. Level 3 is the step of limited self-driving automation where all manipulations for driving are carried out automatically by the vehicle within limited circumstances. Level 4 is the step where every manipulation is carried out automatically by the vehicle once the destination is entered.
This study derives 4 scenarios in which ADAS functions are utilized depending on the autonomous vehicle automation step. The scenarios consist of sub-sections: typing into the GPS system, driving in the city, and driving on the express way. Additionally, uncertain situations were provided at random to examine how a driver copes with an uncertain situation and takes the responsibility. It was assumed that experiencing such an uncertain situation would affect the extent of automation acceptance significantly. Specific scenarios and major functions derived in the NHTSA autonomous vehicle automation levels are presented in Table 2 below.
|
NHTSA'S
five |
Representative function |
Scenario of evaluation |
|
Level 1 |
Cruise control or Lane keeping system |
A Driver starts implementing a navigation system and input ‘Korea University'. Following navigation’s guidance, driver should enter the highway. After entering into
highway, driver should keep the speed limit 80~100km and operate cruise
control or Lane keeping system when he/she wants. At this time, driver's
eyes should be at the front and driver's hands should
be holding handle. In the meantime of using the function, a driver should
step on the brake when facing emergency state. After that, a driver can
depart towards destination again. |
|
Level 2 |
Smart cruise control + lane keeping system |
A driver starts implementing a
navigation system and input 'Korea University’. Following navigation's direction, a driver should enter the
highway. After entering into highway, a driver can operate highway driving
assist. At this time, driver's eyes should be at the front and driver's hands
can be placed off from handle for five seconds. In the meantime of using the
function, a driver should step on the brake when facing emergency state.
After that, a driver can depart towards destination again. |
|
Level 3 |
Highway autonomous driving system |
A driver starts implementing a
navigation system and input 'Korea University' by using voice recognition.
Following navigation's direction, a driver should enter the highway. After
entering into highway, a driver can operate highway autonomous driving system
with the guidance of "this is where you can start autonomous driving"
when he/she enters a fixed interval. As the system operates, driving control
will devolve on a car with the order of pedal., handle, and eyes. At this
point, a driver does not have to look at the front and can off hands from the
handle. In the meantime of using the function, a driver should step on the
brake when facing emergency state. If the interval of autonomous driving is
finished with the guidance of "this is where to stop for autonomous
driving", driving control will devolve on a driver with the order of
eyes, handle, and pedal. After that, a driver can depart towards destination
again. |
|
Level 4 |
Full autonomous driving system |
A driver starts implementing a
navigation system and input 'Korea University' by using voice recognition. A
driver will hear "do you want to operate autonomous vehicle system?"
from navigation. A driver can operate full Autonomous driving system. As a
system is operated, every driving control will devolve on a car. At this
point, a driver does not have to look at the front and can off hands from the
handle. Like this, a driver can drive with autonomous vehicle system through
all the way of highway and local area. When there is an emergency, a car will
give the alarm and operate a brake system itself to respond. After that, a
system will be terminated with the guidance of "you arrived at
destination" at the destination. |
3.3 Subjects
As this study focuses on the 3rd and 4th steps of the autonomous vehicle automation to be realized in the future, the assessment was conducted among those currently in their 20s to 30s who would be in their 30s to 50s by the year of 2030 when the technology would be mature enought to utilize these steps (Dokic et al., 2015; MLIT, 2015; Moon, 2013; Shanker et al., 2013). In reference to the assessment criteria for NHTSA driving experience, the assessment included drivers who would drive a vehicle at least 11,300km a year. The sex ratio was about 1:1 - 32 men and 36 women - among 68 subjects in total (NHTSA, 2010). The average age of the subjects was 30.32 and the standard deviation was 5.82.
3.4 Experiment environment
The equipment prepared for this experiment consisted of the driving simulator, situation board, and multi-touch monitor as shown in Figure 3. For the driving simulator, 3 units of 27-inch LCD monitors were used, and the screen size of each monitor was 1,680 × 1,050. Thus, the total size was 5,040 × 1,050. Logitech G27 controller was used with the steering wheel, pedals, and gears as components. Additionally, PNS GTs Plus wheel hangers and seats were used. To simulate the driving environment of a passenger car, EURO TRUCK SIMULATOR 2 developed by SOS Software was utilized. For interactions with the driver while the ADAS was functioning, a 20-inch multi-touch monitor was used. As for functional operation, pushes which are commonly used in modern-day automobiles and induce behaviors of interactions between a human and a machine were utilized (Byun, 2008; Ban, 2014). Specifically, AXURE RP PRO 6.5 Software was used to embody these switches. In addition, for the situation board to display current conditions of functional operation and emergency situations, a 14-inch LG laptop computer was utilized. The experiment manager had corresponding images displayed on the screen. As for driving sections, a destination was entered to the GPS navigation system with the car stopped, and the vehicle passed the city, express way, and then arrived at the destination. In the autonomous vehicle automation step, the experiment manager assisted by means of a keyboard for driving and other functions.

3.5 Experimental procedures
Interviews were conducted regarding measurement items that were determined based on literary investigation, and items found inappropriate were modified. Based on the modified set of measurement items, the experiment was conducted in utilization of the driving simulator. This experiment proceeded in the order of preparation, practice, and assessment. In the preparation step, the experimental objective and procedures were explained to subjects. Descriptions no the historical background of each scenario and the ADAS were also given. In the practice step, about 15 minutes were given to subjects so that they could practice manipulating the controllers for the driving simulation prior to the assessment step. Finally in the assessment step, the order of 4 assessment scenarios was arranged in a way of Latin square for counter balancing in order to control extraneous variables (Williams, 1949). Above-defined measurement items were assessed by means of the 5-point Likert scale, and interviews were conducted after each scenario to collect subjective views. The experiment took about 1 hour and 15 minutes, and an assessment was conducted once for each scenario with no repetition.
3.6 Analysis method
This study adopted SmartPLS 3.0 (SmartPLS GmbH, Bönningstedt, Germany) to test the study model. Basically, the PLS analysis involves no restrictions to the sample size as well as regular distribution of residuals and variables. It is possible to analyze the result only with a small number of samples. This method has been verified as a test method for predictive models in many studies (Fornell and Bookstein, 1982). To verify the statistical significance of factors that might affect BI, the analysis of Smart PLS Bootstrapping was conducted. bootstrapping sampling was implemented 1,000 times to verify factors that would affect BI with the reliance level as high as 95% and the significance level 0.05 respectively.
In this study, the average of each factor's measurement items utilized by Rödel et al. (2014) was defined in UX/UA scores. To examine differences in each factor's UX/UA scores, SPSS Software (SPSS 23.0, IBMSPSS, USA) was utilized as the repetition measurement variance analysis was conducted for one variable in the autonomous vehicle automation step and the independent sample T-test was conducted for the 2 variables - past uses and sex distinction.
4.1 Results regarding factors that affect BI
4.1.1 Study model test: reliability and validity test
To interpret analysis results appropriately, the reliability and validity of the model analysis results need to be confirmed. In general, when Cronbach's alpha coefficient is 0.6 or higher, the reliability is viewed as high enough (Nunnally et al., 1967). In this study, the alpha coefficient was all over 0.6, which indicates that there is no problem in terms of reliability (Table 3). Validity is related to whether the target of measurement is actually measured. To judge construct validity in this study, convergent validity was utilized. When the value of Average Variance Extracted (AVE) is over 0.5 and the value of Composite Reliability (CR) is over 0.7, it convergent validity is viewed as high enough (Chin, 1998). In this study, the AVE value was all over 0.5 and the CR value over 0.7 respectively, which indicates that there is no problem in terms of validity (Table 4).
|
Variable |
Factor |
The number of item |
Alpha |
|
Independent variable |
Performance Expectancy (PE) |
3 |
0.886 |
|
Effort Expectancy (EE) |
3 |
0.784 |
|
|
Social Influence (SI) |
3 |
0.850 |
|
|
Self-Efficacy (SE) |
3 |
0.922 |
|
|
Perceived Safety (PS) |
3 |
0.881 |
|
|
Anxiety (AX) |
3 |
0.951 |
|
|
Trust (T) |
3 |
0.976 |
|
|
Affective Satisfaction (AS) |
3 |
0.963 |
|
|
Dependent variable |
Behavior Intention (BI) |
3 |
0.933 |
|
Variable |
Factor |
Composite reliability |
AVE |
|
Independent variable |
Performance Expectancy (PE) |
0.930 |
0.815 |
|
Effort Expectancy (EE) |
0.871 |
0.692 |
|
|
Social Influence (SI) |
0.909 |
0.769 |
|
|
Self-Efficacy (SE) |
0.951 |
0.867 |
|
|
Perceived
Safety (PS) |
0.927 |
0.809 |
|
|
Independent variable |
Anxiety (AX) |
0.969 |
0.912 |
|
Trust (T) |
0.985 |
0.955 |
|
|
Affective Satisfaction (AS) |
0.976 |
0.932 |
|
|
Dependent variable |
Behavior Intention (BI) |
0.957 |
0.882 |
4.1.2 Factors that affect BI
Derived variables that affect BI include PE, SI, PS, AX, T, and AS. EE and SE are excluded from the list of variables that affect BI. It turned out that the explanatory power of BI (R Square Adjusted) was quite high up to 0.84, which indicates that PE, SI, PS, AX, T, and AS explains BI as much as 84%. Specific results of the bootstrapping are presented in Table 5.
|
Independent variable |
Dependent variable |
Sample mean |
Standard deviation |
T |
p |
|
Performance Expectancy (PE) |
Behavior Intention (BI) |
0.11 |
0.035 |
3.20 |
0.00** |
|
Effort Expectancy (EE) |
-0.01 |
0.025 |
0.47 |
0.63 |
|
|
Social Influence (SI) |
0.13 |
0.032 |
4.41 |
0.00** |
|
|
Self-Efficacy (SE) |
-0.00 |
0.035 |
0.21 |
0.83 |
|
|
Perceived Safety (PS) |
0.14 |
0.047 |
3.11 |
0.00** |
|
|
Anxiety (AX) |
-0.20 |
0.035 |
6.06 |
0.00** |
|
|
Trust (T) |
0.17 |
0.042 |
4.13 |
0.00** |
|
|
Affective Satisfaction (AS) |
0.30 |
0.052 |
5.86 |
0.00** |
4.2 Each factor's UX/UA scores
4.2.1 Each factor's UX/UA scores depending on the autonomous vehicle automation step
This study examines changes in each factor's UX/UA scores depending on the autonomous vehicle automation step in a way of the repeated measurement variance analysis (Table 6).
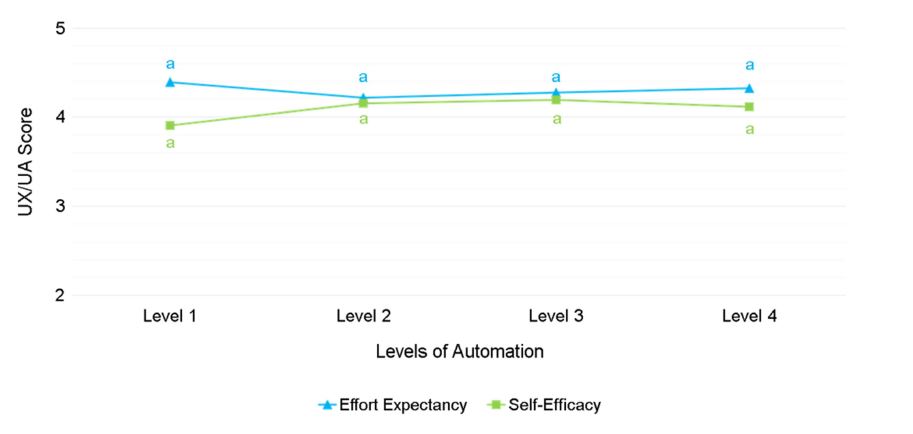
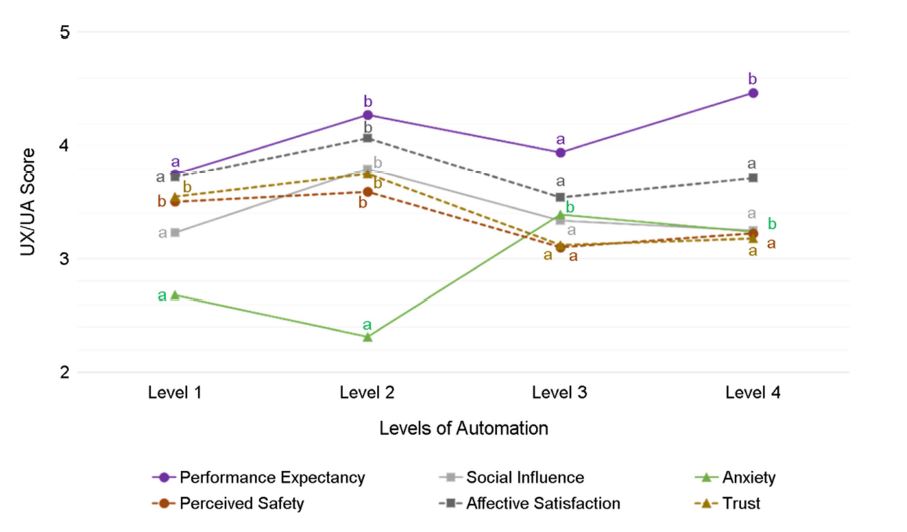
Except EE and SE regarding efforts that were found not to affect BI in the first result stated above, the other factors showed statistically significant difference depending on the autonomous vehicle automation step. In addition, factors that are statistically significant depending on the autonomous vehicle automation step and those that are not are classified and presented in Figure 4 and Figure 5. As for UX/UA scores of factors that showed statistical changes, the scores of SI, PS, T, and AS except for PE increased up to the 2nd step of automation, decreased down to the minimum in the 3rd step of automation, and then increased a bit in the 4th step according to the Student-Newman-Keuls (SNK) post-hoc test result (Table 7). However, the tendency of AX, which was in an inverse proportion to BI was the opposite to that of other factors.
|
Factor |
Levels of automation |
F |
p |
Avg. |
Standard deviation |
SNK Post-hoc analysis |
|
Performance Expectancy (PE) |
1 2 3 4 |
11.67 |
0.00** |
3.75 4.27 3.94 4.47 |
± 0.75 ± 0.67 ± 0.92 ± 0.77 |
a b a b |
|
Effort Expectancy (EE) |
1 2 3 4 |
1.78 |
0.15 |
4.39 4.21 4.27 4.43 |
± 0.53 ± 0.53 ± 0.61 ± 0.79 |
|
|
Social Influence (SI) |
1 2 3 4 |
2.64 |
0.05* |
3.28 3.71 3.35 3.46 |
± 0.83 ± 0.76 ± 1.02 ± 1.17 |
a b a a |
|
Self-Efficacy (SE) |
1 2 3 4 |
1.63 |
0.18 |
3.90 4.15 4.19 4.11 |
± 0.73 ± 0.77 ± 0.83 ± 0.97 |
|
|
Perceived Safety (PS) |
1 2 3 4 |
4.68 |
0.00** |
3.59 3.72 3.15 3.37 |
± 0.94 ± 0.79 ± 1.04 ± 1.01 |
b b a a |
|
Anxiety (AX) |
1 2 3 4 |
11.08 |
0.00** |
2.67 2.31 3.38 3.23 |
± 1.16 ± 1.09 ± 1.29 ± 1.34 |
a a b b |
|
Trust (T) |
1 2 3 4 |
5.15 |
0.00** |
3.54 3.74 3.11 3.17 |
± 1.05 ± 0.98 ± 1.11 ± 1.20 |
b b a a |
|
Affective Satisfaction (AS) |
1 2 3 4 |
3.78 |
0.01** |
3.72 4.06 3.53 3.71 |
± 0.88 ± 0.78 ± 1.01 ± 1.06 |
a b a a |
|
Behavior Intention (BI) |
1 2 3 4 |
3.63 3.81 3.60 3.71 |
||||
|
Total average of |
3.64 |
|
Levels of automation |
Means |
Standard deviation |
F |
p |
SNK Post-hoc analysis |
|
1 |
3.53 |
± 0.93 |
13.39 |
0.00** |
b |
|
2 |
3.81 |
± 0.84 |
a |
||
|
3 |
3.29 |
± 1.05 |
c |
||
|
4 |
3.43 |
± 1.12 |
b |
4.2.2 Each factor's UX/UA scores depending on past uses
This study examines differences in each factor's UX/UA scores depending on past uses in a way of independent sample T-test (Table 8).
|
Factor |
Pre-experience (Independent variable) |
T |
p |
Avg. |
Standard deviation |
|
Performance Expectancy (PE) |
Yes |
3.55 |
0.00** |
4.30 3.97 |
± 0.65 ± 0.90 |
|
Effort Expectancy (EE) |
Yes |
-1.67 |
0.96 |
4.25 4.38 |
± 0.70 ± 0.56 |
|
Social Influence (SI) |
Yes |
4.01 |
0.00** |
3.71 3.27 |
± 0.77 ± 1.05 |
|
Self-Efficacy (SE) |
Yes |
0.15 |
0.98 |
4.09 4.09 |
± 0.72 ± 0.90 |
|
Perceived Safety (PS) |
Yes |
3.47 |
0.00** |
3.69 3.30 |
± 0.79 ± 1.05 |
|
Anxiety (AX) |
Yes |
-3.32 |
0.00** |
2.59 3.11 |
± 1.19 ± 1.32 |
|
Trust (T) |
Yes |
2.56 |
0.01** |
3.59 3.25 |
± 1.01 ± 1.16 |
|
Affective Satisfaction (AS) |
Yes |
3.09 |
0.00** |
3.96 3.61 |
± 0.78 ± 1.03 |
|
Behavior Intention (BI) |
Yes |
2.79 |
0.00** |
3.96 3.60 |
± 0.89 ± 1.18 |
Except EE and SE regarding efforts that were found not to affect BI in the first result stated above, the other factors showed statistically significant difference depending on the past uses. Factors that showed statistical difference - PE, SI, PS, AX, T, and AS - showed a tendency of high UX/UA scores of factors in the group with past uses compared to in the group with no past use. However, the tendency of AX, which was in an inverse proportion to BI was the opposite to that of other factors.
4.2.3 Each factor's UX/UA scores depending on sex distinction
This study examines differences in each factor's UX/UA scores depending on sex distinction in a way of independent sample T-test (Table 9).
Factor |
Gender |
T |
p |
Avg. |
Standard deviation |
|
Performance Expectancy (PE) |
Men Woman |
0.92 |
0.36 |
4.16 4.06 |
± 0.74 ± 0.89 |
|
Effort Expectancy (EE) |
Men Woman |
-0.47 |
0.63 |
4.31 4.34 |
± 0.67 ± 0.92 |
|
Social Influence (SI) |
Men Woman |
0.96 |
0.34 |
3.51 3.40 |
± 0.84 ± 1.06 |
|
Self-Efficacy (SE) |
Men Woman |
3.42 |
0.01** |
4.27 3.93 |
± 0.67 ± 0.92 |
|
Perceived Safety (PS) |
Men Woman |
2.95 |
0.00** |
3.64 3.30 |
± 0.86 ± 1.03 |
|
Anxiety (AX) |
Men Woman |
-1.73 |
0.08* |
2.75 3.03 |
± 1.17 ± 1.39 |
|
Trust (T) |
Men Woman |
2.57 |
0.01** |
3.57 3.23 |
± 0.88 ± 1.26 |
|
Affective Satisfaction (AS) |
Men Woman |
1.63 |
0.11 |
3.85 3.67 |
± 0.87 ± 1.01 |
|
Behavior Intention (BI) |
Men Woman |
1.49 |
0.14 |
3.85 3.66 |
± 0.99 ± 1.15 |
SE that was found not to affect BI in the first result stated above showed statistically significant difference depending on sex distinction. Among factors that affect BI, PS and T showed statistically significant difference, and the UX/UA scores of factors were higher among men than women. However, the tendency of AX, which was in an inverse proportion to BI was the opposite to that of other factors. The rest of the factors showed no statistical difference.
5.1 Discussion on factors that affect BI
In the study of Adell (2010) on the acceptance of the Driver Support System by means of a UTAUT model, the explanatory power of BI was as low as 20%. In contrast, the explanatory power of the study model in this study was as high as 84%. Two major causes of such difference are considering user experiences by means of a driving simulator and adding significant factors to the study model. In addition to existing factors such as PE, EE, and SI, this study considers AX, PS, T, and AS.
As in Trösterer et al. (2014), Ghazizadeh et al. (2012), and Helldin et al. (2013) researches, it turned out that T caused significant effect on BI. T is an important element since driving is directly connected with life. The result was significant since the extent of T in the context of automation is a vital factor that decides drivers' acceptance and reliance on automation. Thus, further researches on T need to be conducted to find out ways to improve drivers' T. In addition, it turned out that as in De Waard et al. (1999), Joshi et al. (2009) researches, PS and AX caused statistically significant effect on BI. As concerns about safety of the ADAS and automation functions are raised due to the recent Tesla accident, factors related to a driver's safety such as perceived safety and anxiety as well as above-mentioned trust are emphasized. It is expected that the importance of driver safety will increase as the autonomous vehicle automation step advances. Accordingly, related companies need to conduct assessments of factors related to driver safety in advance to actual application of the ADAS. Particularly when a questionnaire is used instead of a driving simulator, a rather conservative approach to the factors will be necessary. It turned out that AS showed a large amount of T statistics, indicating its significant effect on BI. This means that AS may be used as a substitute variable to the actual success of system. In this experiment, the driver was free to use or stop using functions during the driving simulation. As it was voluntary use at the driver's discretion rather than compulsory use, the condition affected BI significantly. Hence, AS seems to be an important factor to be considered in future researches on the ADAS and autonomous vehicles.
In line with Rödel et al. (2014), Ghazizadeh et al. (2012), and Adell (2010) researches, however, EE caused no statistically significant effect on BI although it was in contrast with the finding of Trösterer et al. (2014). As for ADAS acceptance, results regarding EE may be different depending on model configuration (difference in parameters), ADAS functions, and drivers' use environments (Ghazizadeh et al., 2012). In general, EE on the efforts put forth through a UTAUT Model caused significant effect on BI when the user was required to use a computer program (Adell, 2010). In the case of vehicles, however, a secondary task affects the driving performance, and thus lower load and less complicated behaviors are required than in the above-mentioned case of using a computer program (Osswald et al., 2012). For instance, if a complicated process is required to implement a function, it will affect the primary driving task negatively and increase the probability of accident occurrence. For this reason, current automotive controllers adopt push switches that are intuitive and easy to use in order to minimize load to the driver. In this study as well, push switches were used for every function in the autonomous vehicle automation step, and thus EE caused no effect on the extent of acceptance. In other words, as functional implementation of the ADAS needs to be intuitive and easy in the contest of automotive design, it turned out that EE had no effect on BI in this study. It also turned out that just as in the case of EE, SE caused no effect on BI.
5.2 Discussion on the UX/UA scores of each factor
5.2.1 Discussion on the UX/UA scores of each factor depending on the autonomous vehicle automation step
Rödel et al. (2014) showed that the UX/UA scores of PE decreased as the autonomous vehicle automation step proceeded, but in this study, the highest score was in the 4th step of automation. One major cause of such difference is considering user experiences by means of a driving simulator. As drivers experienced in the driving simulation that as the automation step proceeded, personal behaviors in driving decreased, they marked higher scores on the usefulness and convenience. Just as in previous researches, T in this study decreased gradually as the automation step proceeded and then somewhat increased in the 4th step. Throughout the automation steps, however, T scores were lower than the average of each automation step (Table 6). In general, T advances with past experiences of interactions. T in the ADAS as well is known to be affected by drivers' personal experience of use (Ravald and Grönroos, 1996; Trösterer et al., 2014). As in existing researches, UX/UA scores of T depending on past uses in this study show that in the group with past use experience UX/UA scores were higher than those in the other group. Thus, it is expected that as the use of the ADAS becomes common in the future, the score of T will increase.
While in the study of Rödel et al. (2014), scores of most factors in this study decreased as the autonomous vehicle automation step proceeded, scores increased up to the 2nd step of automation, decreased and then maintained or somewhat increased again in the 3rd step. The lowest score was shown in the 3rd step of automation probably because, as in the study of Helldin et al. (2013), the process of handing over the manipulation right (conversion from manual operation to autonomous operation or conversion from autonomous operation to manual operation) caused anxiety and hindered cooperation between the driver and vehicle. Another cause is that the driver recognized the status as an immature step until it finally became complete autonomous driving. Thus, the future study needs to make the process of handing over the manipulation right smooth when the 3rd step of autonomous vehicle automation and partial autonomous vehicle function are to be embodied.
In the study of Rödel et al. (2014), when BI scores in each automation step exceeded the average of 4 steps of automation, it was interpreted that the driver had an intention of use. Results of this study indicate that the driver showed an intention of use in the 1st (Avg. 3.83) and 2nd (Avg. 4.18) steps of automation, but in the 3rd (Avg. 3.43) and 4th (Avg. 3.56) step, no intention of use was displayed. These results are in contrast with the existing findings that the intention of use was confirmed all in steps 1, 2, 3, and 4 of automation and that subjects showed positive attitudes toward higher automation steps. Probably, such difference results from experiences given to users by means of the driving simulator, which were not noticeable through the scenario questionnaire. Drivers felt anxious a lot during the response to emergency situations in the 3rd and 4th steps of automation. It also turned out that they felt anxious even while driving in interactions with other vehicles. Besides, they were frequently surprised at minor external shocks while paying little attention to driving after handing over the authority to drive. However, the way to judge the intention of use based on the average score of the 4 steps of automation is a dichotomous approach that is solely on the basis of the score of a single criterion. The future study needs to apply more logical criteria for judgment. Since drivers' personal past experiences of using the ADAS have significant effect and the extent of acceptance continues to change in the advancement of technology, the study on acceptance also needs to be conducted continually (Kim and Malhotra, 2005; Trösterer et al., 2014).
5.2.2 Discussion on the UX/UA scores of each factor depending on past uses and sex distinction
As in the researches of Rödel et al. (2014) and Höltl and Trommer (2013), it turned out that every factor that was found to affect BI statistically showed higher UX/UA scores in the group with past use experiences than in the other group. Thus, it is expected that UX/UA scores of each factor will increase as the use of the ADAS becomes common and the number of users increases. Among factors that affect BI, PS and T showed statistically significant difference, and the UX/UA scores of factors were higher among men than women. As for sex distinction, however, there needs to be further research because the scope of subjects was limited in terms of age and scale.
This study includes scenarios for each step of autonomous vehicle automation and assessment of acceptance based on user experiences and in utilization of a driving simulator. As for the result regarding the first objective, factors that affect BI are safety and anxiety directly linked with life, including PS, AX, and T as well as PE, SI, and AS. Regarding the second objective, which is related to factors and changes in the advancement of the autonomous vehicle automation step, UX/UA scores decreased in 3rd and 4th steps of automation. Particularly in the 3rd step of automation, the process of handing over the authority in the conversion from/to the autonomous driving section caused anxiety, and the driver recognized the process before the complete autonomous driving as immature. Besides, anxiety in the process of responding to minor shocks and emergency situations resulted in score decrease. UX/UA scores tended to be higher in the group with past use experience than in the other group, and safety-related UX/UA scores were higher in the group of men than in the group of women. It is expected, therefore, that as functions are complemented and their use becomes common, the extent of acceptance will be better than the current result.
This study is of significance regarding the following aspects: First, this study presents an acceptance model of the ADAS, which is a core technology of autonomous vehicle driving, and it verifies the model by means of a driving simulator that creates an environment where users can experience the ADAS. It is expected that the findings of this study will be a basis for future researches on ADAS acceptance. Second, changes in UX/UA scores of each factor in each step of autonomous vehicle automation were examined depending on past uses and sex distinction. This result will be of help in developing appropriate ADAS elements and grasping problems that may affect acceptance in advance. Findings stated above are expected to be useful for the development of tools to verify validity of functions prior to a company's product release. It is also expected that the findings of this study will contribute to preventing potential problems of applying autonomous vehicle technology, developing technology that users can easily accept, and thus improving driver safety and convenience.
References
1. Adell, E., Acceptance of driver support systems, In Proceedings of the European Conference on Human Centered Design for Intelligent Transport Systems, Berlin, Germany, 475-486, 2010.
Crossref
Google Scholar
2. Alm, C. and Lindberg, E., Perceived Risk, Feelings of safety and worry associated with different travel modes, Pilot Study, KFB Stockholm: Linköping University, 2000.
Crossref
Google Scholar
3. Bader, R., Siegmund, O. and Woerndl, W., A study on user acceptance of proactive in-vehicle recommender systems, In Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 47-54, 2011.
Google Scholar
4. Bajaj, A. and Nidumolu, S.R., A feedback model to understand information system usage, Information and Management, 33(4), 213-224, 1998.
Crossref
Google Scholar
5. Ban, K.M., Structural modeling of affective quality for the operation of automotive switch, Korea University Graduate School, 2014.
Crossref
6. Banuls eseda, R., Carbonell Vaya, E., Casonoves, M. and Chisvert, M., Different emotional responses in novice and professional drivers, Traffic and transport psychology, Theory and Application, 343-352, 1997.
Crossref
Google Scholar
7. Becker, S., Summary of experience with autonomous intelligent cruise control (AICC), PART 2, Results and conclusion, In World Congress on Applications of Transport Telematics and Intelligent Vehicle-Highway Systems, Towards an Intelligent Transport System, 4, 1836-1843, 1994.
Crossref
Google Scholar
8. Brookhuis, K. and Brown, I., Ergonomics and road safety, Ergonomics, 165, 35-40, 1992.
Crossref
Google Scholar
9. Brookhuis, K. and De Waard, D., The consequences of automation for driver behavior and acceptance, Proceedings of the International Ergonomics Association (IEA), 10-14, 2006.
Crossref
Google Scholar
10. Byun, J.H., Developing a model of design for product user interaction - Focused on generating information words through user observation and understanding interaction elements -, Korean Society of Design Science, 21(1), 167-176, 2008.
11. Cavaye, A.L., User participation in system development revisited, Information and Management, Information & Management, 28(5), 311-323, 1995.
Crossref
Google Scholar
12. Chin, W.W., Commentary: Issues and opinion on structural equation modeling, 1998.
Crossref
Google Scholar
13. Davis, F.D., A technology acceptance model for empirically testing new end-user information systems: Theory and results, Doctoral dissertation, Massachusetts Institute of Technology, 1986.
Crossref
Google Scholar
14. De Waard, D., van der Hulst, M., Hoedemaeker, M. and Brookhuis, K.A., Driver behavior in an emergency situation in the Automated Highway System, Transportation Human Factors, 1(1), 67-82, 1999.
Crossref
Google Scholar
15. DeLone, W.H. and McLean, E.R., Information systems success: The quest for the dependent variable, Information Systems Research, 3(1), 60-95, 1992.
Crossref
Google Scholar
16. Dillon, A., User Acceptance of Information Technology, In W. Karwowski (ed), Encyclopedia of Human Factors and Ergonomics, London: Taylor and Francis, 2001.
Crossref
Google Scholar
17. Dishaw, M.T. and Strong, D.M., Extending the technology acceptance model with task–technology fit constructs. Information and Management, 36(1), 9-21, 1999.
Crossref
Google Scholar
18. Dokic, J., Müller, B. and Meyer, G., European roadmap smart systems for automated driving, European Technology Platform on Smart Systems Integration, 2015.
Crossref
Google Scholar
19. Eckoldt, K., Knobel, M., Hassenzahl, M. and Schumann, J., An experiential perspective on advanced driver assistance systems, It-Information Technology, 54(4), 165-171, 2012.
Crossref
Google Scholar
20. Fornell, C. and Bookstein, F.L., Two structural equation models: LISREL and PLS applied to consumer exit-voice theory, Journal of Marketing Research, 19, 440-452, 1982.
Crossref
Google Scholar
21. Ghazizadeh, M., Peng, Y., Lee, J.D. and Boyle, L.N., Augmenting the technology acceptance model with trust: Commercial drivers' attitudes towards monitoring and feedback, In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 56(1), 2286-2290, 2012.
Crossref
Google Scholar
22. Groeger, J.A., Mood and driving: is there an effect of affect?, Traffic and transport psychology, Theory and Application, 335-342, 1997.
Crossref
Google Scholar
23. Helldin, T., Falkman, G., Riveiro, M. and Davidsson, S., Presenting system uncertainty in automotive UIs for supporting trust calibration in autonomous driving, In Proceedings of the 5th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 210-217, 2013.
Crossref
Google Scholar
24. Höltl, A. and Trommer, S., Driver assistance systems for transport system efficiency: Influencing factors on user acceptance, Journal of Intelligent Transportation Systems, 17(3), 245-254, 2013.
Crossref
Google Scholar
25. Im, J.S. and Oh, J.I., A Study on the Effect of the Introduction Characteristics of Cloud Computing Services on the Performance Expectancy and the Intention to Use: From the Perspective of the Innovation Diffusion Theory, Asia Pacific Journal of Information Systems, 22(3), 99-124, 2012.
Crossref
26. Joo, J.H., Comparison on predictive model of intention to use smartphones through iPhone user: centered on TAM, TPB & Integrated model, Journal of Digital Convergence, 11(1), 89-97, 2013.
Crossref
Google Scholar
27. Joshi, S., Bellet, T., Bodard, V. and Amditis, A., Perceptions of risk and control: Understanding acceptance of advanced driver assistance systems, In IFIP Conference on Human-Computer Interaction, 5426, 524-527, 2009.
Crossref
Google Scholar
28. Karahanna, E., Agarwal, R. and Angst, C.M., Reconceptualizing compatibility beliefs in technology acceptance research, MIS Quarterly, 30(4), 781-804, 2006.
Crossref
Google Scholar
29. Kim, B.H. and Yoon, M.G., Customer acceptance usage behavior for airline e-services by using UTAUT model, The Korea Academic Society of Tourism and Leisure, 23(6), 471-491, 2011.
Crossref
30. Kim, S.S. and Malhotra, N.K., A longitudinal model of continued IS use: An integrative view of four mechanisms underlying postadoption phenomena, Management Science, 51(5), 741-755, 2005.
Crossref
Google Scholar
31. Lee, J.D. and Kirlik, A., The Oxford handbook of cognitive engineering, Oxford University Press, 2013.
Crossref
Google Scholar
32. Lee, M.B., Influence of the Innovativeness on the Use Intention in SNS: Focused on UTAUT, Journal of the Korea Industrial Information System Society, 17(7), 177-186, 2012.
Crossref
Google Scholar
33. Madigan, R., Louw, T., Dziennus, M., Graindorge, T., Ortega, E., Graindorge, M. and Merat, N., Acceptance of Automated Road Transport Systems (ARTS): an adaptation of the UTAUT model, Proceedings of 6th Transport Research Arena, 2016.
Crossref
Google Scholar
34. Ministry of Land, Infrastructure and Transport, 2015 Report of Vehicle Registration in Seoul, Soul open data Plaza, http:// data.seoul.go.kr/openinf/linkview.jsp?infId=OA-12263#(2016, 11,18).
Crossref
35. Moon, JD., The convergence of vehicle-it and R&D support of Smart Commerce & Industry, The Korean Society Of Automotive Engineers, 2013 Workshop, 5-42, 2013.
Crossref
36. National Highway Traffic Safety Administration., Guidelines for Reducing Visual-Manual driver Distraction During Interactions with In-Vehicle Devices, Department of Transportation Docket no, NHTSA-2010-0053, 2010.
Crossref
37. National Highway Traffic Safety Administration., Preliminary statement of policy concerning automated vehicles, Washington, DC, 2013.
Crossref
38. Nilsson, L., Safety effects of adaptive cruise controls in critical traffic situations, In Steps Forward. Intelligent Transport Systems World Congress, 3, 1254-1259, 1995.
Crossref
Google Scholar
39. Nunnally, J.C., Bernstein, I.H. and Berge, J.M.T., Psychometric theory, New York: McGraw-Hill Book Company, 1967.
Crossref
Google Scholar
40. Osswald, S., Wurhofer, D., Trösterer, S., Beck, E. and Tscheligi, M., Predicting information technology usage in the car: towards a car technology acceptance model, In Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 51-58, 2012.
Crossref
Google Scholar
41. Parasuraman, R., Sheridan, T.B. and Wickens, C.D., Situation awareness, mental workload, and trust in automation: Viable, empirically supported cognitive engineering constructs, Journal of Cognitive Engineering and Decision Making, 2(2), 140-160, 2008.
Crossref
Google Scholar
42. Park, E. and Kim, K.J., Driver acceptance of car navigation systems: integration of locational accuracy, processing speed, and service and display quality with technology acceptance model, Personal and Ubiquitous Computing, 18(3), 503-513, 2014
Crossref
Google Scholar
43. Park, J.M. Ha, H.N., Hong, S.W. and Chung, K.W., Building service UX index: Measuring UX satisfaction in mobile content services, The HCI Society of Korea, 9(2), 41-51, 2014.
Crossref
44. Ravald, A. and Grönroos, C., The value concept and relationship marketing, European Journal of Marketing, 30(2), 19-30, 1996.
Crossref
Google Scholar
45. Rödel, C., Stadler, S., Meschtscherjakov, A. and Tscheligi, M., Towards autonomous cars: The effect of autonomy levels on acceptance and user experience, In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 1-8, 2014.
Crossref
Google Scholar
46. Ryu, G.J. and Kwon, H.I., A Study on the Factors Affecting Genuine Guarantee System's Acceptance, Journal of Information Technology Applications and Management, 12(3), 1-25, 2005.
Crossref
Google Scholar
47. Schaller, T., Schiehlen, J. and Gradenegger, B., Congestion Assistance-Supporting the driver in lateral and longitudinal guidance System development and customer acceptance, Aktive Sicherheit durch Fahrerassistenz, 3(10), 2008.
Crossref
48. Shanker, R., Jonas, A., Devitt, S., Huberty, K., Flannery, S., Greene, W. and Moore, J., Autonomous Cars: Self-Driving the New Auto Industry Paradigm, Morgan Stanley Blue Paper, Morgan Stanley & Co. LLC, 2013.
Crossref
49. Shin, Y.J., Seol, S.N., Lee, K.W. and Bae, S.Y., Patent analysis for innovative technology development of advanced driver assistance systems (ADAS), Journal of Information Technology and Architecture, 13(1), 147-160, 2016.
Crossref
50. Trösterer, S., Wurhofer, D., Rödel, C. and Tscheligi, M., Using a parking assist system over time: Insights on acceptance and experiences, In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 1-8, 2014.
Crossref
Google Scholar
51. Venkatesh, V., Morris, M.G., Davis, G.B. and Davis, F.D., User acceptance of information technology: Toward a unified view, MIS Quarterly, 27(3), 425-478, 2003.
Crossref
Google Scholar
52. Wang, Y.S., Wu, M.C. and Wang, H.Y., Investigating the determinants and age and gender differences in the acceptance of mobile learning, British Journal of Educational Technology, 40(1), 92-118, 2009.
Crossref
Google Scholar
53. Williams, E.J., Experimental designs balanced for the estimation of residual effects of treatments, Australian Journal of Chemistry, 2(2), 149-168, 1949.
Crossref
Google Scholar
54. Yoon, B.J. and Kim, J.H., Trend of technology of Research and Development (R&D) about Advanced car, Institute of Control, Robotics and Systems, 18(2), 21-29, 2012.
Crossref
PIDS App ServiceClick here!